
Abstract
The mathematical model has been formulated using Lord-Shulman theory for transversely isotropic magneto thermoelastic solid with two temperature and without energy dissipation due to inclined load. The entire thermo-elastic medium is rotating with a uniform angular velocity. The Laplace and Fourier transform techniques have been used to find the solution to the problem. The displacement components, stress components and conductive temperature distribution with the horizontal distance are computed in the transformed domain and further calculated in the physical domain using numerical inversion techniques. The effect of two temperature and angle of inclination of inclined load is depicted graphically on the resulting quantities.
Similar content being viewed by others
1 Introduction
During the past few years, wide spread attention has been given to thermoelasticity theories that defines the deformation and heat flow in continuum. The classical theory of elasticity deals with the systematic study of the stress and strain distribution that develops in an elastic body due to the application of forces or change in temperature. The study of dynamical system whose interaction with surroundings is restricted to external forces, mechanical work and thermal fields is one of the most extensive and productive areas of continuum dynamics. The proposed model is helpful for finding the type of interaction between mechanical and thermal forces, as most of the structural elements of heavy industries are frequently related to mechanical and thermal stresses at a higher temperature.
Chen et al. [1,2,3] formulated a two temperature thermoelasticity of deformable bodies for the conduction of heat depending on two types of temperatures. Ailawalia and Narah [4] had studied the deformation of a rotating generalized thermoelastic solid beneath the impact of gravity with a superimposing infinite thermoelastic fluid due to different forces acting along the interface. Ailawalia et al. [5] had studied a rotating generalized thermoelastic medium with two temperatures beneath hydrostatic stress and gravity with different types of sources using integral transforms. Marin [6] had proved the Cesaro means of the kinetic and strain energies of dipolar bodies with finite energy. Sharma and Kaur [7] presented the propagation of Rayleigh waves in a generalized thermoelastic half-space with voids. The surface chosen is stress-free and thermally insulated. They detected the elliptical paths during the Rayleigh wave motion without rotation. Abd-Alla et al. [8] investigated the Rayleigh waves propagation in a homogeneous orthotropic elastic medium with impact of rotation, initial stress and gravity field by Lame’s potentials and governing equations.
Singh and Yadav [9] solved the equations of transversely isotropic rotating magnetothermoelastic medium by cubic velocity equation of three plane waves without anisotropy, rotation, and thermal and magnetic effects. Banik and Kanoria [10] studied the thermoelastic interaction in an isotropic infinite elastic body with a spherical cavity for the three-phase-lag heat equation with two-temperature generalized thermoelasticity theory and has shown dissimilarities between two models: the two-temperature Green-Naghdi theory with energy dissipation and two-temperature three-phase-lag model and has shown the effects of ramping parameters and two-temperature. Mahmoud [11] had considered the influence of rotation, magnetic field, relaxation times, initial stress and gravity field on attenuation coefficient and Rayleigh waves in an elastic half-space of granular medium and obtained the analytical solution of Rayleigh waves velocity by using Lame’s potential techniques.
Abd-alla and Alshaikh [12] had discussed the effect of rotation and magnetic field on plane waves in transversely isotropic thermoelastic medium under the Green-Lindsay theory with two relaxation times of generalized thermoelasticity to show the presence of three quasi plane waves in the medium. Marin et al. [13] had modelled a micro stretch thermoelastic body with two temperatures and eliminated divergences among the classical elasticity and research. Mahmoudet al. [14] studied the impact of the initial stress and rotation on harmonic waves propagation in a human long dry bone (transversely isotropic material). They solved the equations of elastodynamic in terms of displacements. Sharma et al. [15] investigated the two dimensional deception in a homogeneous, transversely isotropic thermoelastic solids with two temperatures in Green-Naghdi -II theory with an inclined load (linear combination of normal load and tangential load). Shaw and Mukhopadhyay [16] exemplified the generalized theory of thermoelasticity including the thermal relaxation time, electric displacement current, and the coupling of heat transfer and microrotation of the material to study the propagation of plane harmonic waves in an infinitely long, isotropic, micropolar plate with a uniform magnetic field. Two potential functions were used to determine the effect of the presence of thermal and magnetic fields on the phase velocity.
Kumar et al. [17] investigated the effects of Hall current in a transversely isotropic magnetothermoelastic with and without energy dissipation due to normal force. Bijarnia and Singh [18] studied the propagation of plane waves using Lord and Shulman theory of generalized thermoelasticity in a transversely isotropic thermoelastic solid half-space with voids and rotation and solved to illustrate the existence of four plane waves and its reflection from thermally insulated stress free surface. Kumar et al. [19] illustrated the effect of Hall current and magnetic field due to thermomechanical sources on GN-II and GN-III theories in a rotating transversely isotropic homogeneous thermoelastic medium with two temperatures. Lata et al. [20] studied two temperature and rotation aspect for GN-II and GN-III theory of thermoelasticity in a homogeneous transversely isotropic magnetothermoelastic medium for the case of the plane wave propagation and reflection. Mona and SE [21] compared the theory of thermoelasticity with two relaxation times and without energy dissipation. Kumar et al. [22] considered a thick circular plate with axisymmetric heat supply with traction free lower and upper surfaces of the plate. Ezzat et al. [23] proposed a mathematical model of electro-thermoelasticity for heat conduction with memory-dependent derivative. Kumar et al. [24]. analyzed the Rayleigh waves in a homogeneous transversely isotropic magnetothermoelastic medium with two temperature, with Hall current and rotation.
Marin et al. [25] studied the GN-thermoelastic theory for a dipolar body using mixed initial BVP and proved a result of Hölder’s -type stability. Lata [26] studied the effect of energy dissipation on plane waves in sandwiched layered thermoelastic medium of uniform thickness, with combined effects of two temperature, rotation and Hall current in the context of GN Type-II and Type-III theory of thermoelasticity. Ezzat and El-Bary [27] gave mathematical model of phase-lag G-N magneto-thermoelasticty theories for perfectly conducting media based on fractional derivative heat transfer in the presence of a constant magnetic field. Abo-Dahab [28] analyzed the wave propagation in a microstretch elastic medium with GN theory with impact of gravity. Ezzat and El-Bary [29] had applied the magneto-thermoelasticity model to a one-dimensional thermal shock problem of functionally graded half-space based on memory-dependent derivative. Hassan et al. [30] investigated water base nanofluid flow over wavy surface in a porous medium (copper oxides particles) of spherical packing beds. Othman et al. [31] discussed the deformation in rotating infinite microstretch generalized thermoelastic medium. Despite of this several researchers worked on different theory of thermoelasticity as Marin [32,33,34], Marin and Baleanu [33], Ezzat et al. [35,36,37], Marin and Stan [38], Ezzat and El-Bary [39, 40], Ezzat et al. [41], Chauthale et al. [42], Marin [43,44,45], Kumar et al. [46] and Lata and Kaur [47,48,49].
Inspite of these, not much work has been carried out in magneto-thermoelastic transversely isotropic solid with the combined effects of rotation and two temperatures in generalized thermoelasticity without energy dissipation. Keeping these considerations in mind, analytic expressions for the displacements, stresses and temperature distribution in two-dimensional homogeneous, transversely isotropic magneto-thermoelastic solids with two temperatures and rotation due to inclined load have been obtained.
2 Basic equations
For a general anisotropic thermoelastic medium, the constitutive relations in absence of heat source and body forces following Green and Naghdi [50] are given by
Equation of motion as described by Schoenberg and Censor [51] for a transversely isotropic thermoelastic medium rotating uniformly with an angular velocity \({\varvec{\Omega}} = \varOmega {\varvec {n}}\), where n is a unit vector representing the direction of axis of rotation and taking into account Lorentz force
where \(F_{i} = \mu_{0} \left( {\vec{j} \times \vec{H}_{0} } \right)\) are the components of Lorentz force, \(\vec{H}_{0}\) is the external applied magnetic field intensity vector, \(\vec{j}\) is the current density vector, \(\vec{u}\) is the displacement vector, \(\mu_{0}\) and \(\varepsilon_{0}\) are the magnetic and electric permeabilities respectively. The terms \(\varOmega \times \left( {\varOmega \times u} \right)\) and \(2\varOmega \times \dot{u}\) are the additional centripetal acceleration due to the time-varying motion and Coriolis acceleration respectively.
The heat conduction equation without energy dissipation using Lord-Shulman [52] model is
where
Here \(C_{ijkl}\) are elastic parameters and having symmetry \((C_{ijkl} = C_{klij} = C_{jikl} = C_{ijlk} ).\) The basis of these symmetries of \(C_{ijkl}\) is due to
-
1.
The stress tensor is symmetric, which is only possible if \(\left( {C_{ijkl} = C_{jikl} } \right)\)
-
2.
If a strain energy density exists for the material, the elastic stiffness tensor must satisfy \(C_{ijkl} = C_{klij}\)
-
3.
From stress tensor and elastic stiffness tensor symmetries infer \(\left( {C_{ijkl} = C_{ijlk} } \right)\) and \(C_{ijkl} = C_{klij} = C_{jikl} = C_{ijlk}\).
\(\beta_{ij}\) is the thermal elastic coupling tensor, \(T\) is the absolute temperature, \(T_{0}\) is the reference temperature, \(\varphi\) is the conductive temperature, \(t_{ij}\) are the components of stress tensor, \(e_{ij}\) are the components of strain tensor, \(u_{i}\) are the displacement components, \(\rho\) is the density, \(C_{E}\) is the specific heat, \(K_{ij}\) is the materialistic constant, \(a_{ij}\) are the two temperature parameters, \(\alpha_{ij}\) is the coefficient of linear thermal expansion, \(\tau_{0}\) is the relaxation time, which is the time required to maintain steady state heat conduction in an element of volume of an elastic body when sudden temperature gradient is imposed on that volume element, \(\delta_{ij}\) is the Kronecker delta and \(\varOmega\) is the angular velocity of the solid.
3 Formulation and solution of the problem
We consider a homogeneous transversely isotropic magneto-thermoelastic medium, permeated by an initial magnetic field \(\vec{H}_{0} = \left( {0, H_{0} , 0} \right)\) acting along \(y\)-axis. The rectangular Cartesian co-ordinate system \(\left( {x, y, z} \right)\) having origin on the surface \(\left( {z = 0} \right)\) with \(z\)-axis pointing vertically into the medium is introduced. The surface of the half-space is subjected to an inclined load acting at \(z = 0\).
We also assume that
In From the generalized Ohm’s law
The current density components \(J_{1}\) and \(J_{3}\) are given as
The components of displacement vector \(\left( {\vec{u}, \vec{v}, \vec{w} } \right)\) and conductive temperature \(\varphi\) for the two dimensional problem have the form
Following Slaughter [53], using appropriate transformations, on the set of Eqs. (1)–(3) and using (8), we derive the basic equations for perfectly homogeneous transversely isotropic magneto-thermoelastic solid as,
and
where
We assume that medium is initially at rest. The undisturbed state is maintained at reference temperature. Then we have the initial and regularity conditions as given by
To facilitate the solution, following dimensionless quantities are introduced:
Making use of (15) in Eqs. (9)–(11), after suppressing the primes, yield
where
Apply Laplace and Fourier transforms defined by
On Eqs. (16)–(18), we obtain a system of equations
where \(\delta_{7} = \frac{{\varepsilon_{0} \mu_{0}^{2} H_{0}^{2} }}{\rho } + 1\), \(\delta_{8} = 1 + \tau_{0} \frac{{C_{1} }}{L}s\).
Without considering internal heat source and setting \(\hat{Q}\left( {\xi ,z,s} \right) = 0\) we yield a set of homogeneous equations which will have a non trivial solution if determinant of coefficient \(\left( {\hat{u}, \hat{w},\hat{\varphi }} \right)\) vanishes and we obtain the following characteristic equation
where
The roots of the Eq. (24) are ± λi, (i = 1, 2, 3), the solution of the Eq. (24) satisfying the radiation condition that \({\tilde{u}},{\tilde{w}}, {\tilde{\varphi }} \to 0 \;{\text{as}}\; z \to \infty ,\) yields
where \(A_{i,} i = 1, 2, 3\) being undetermined constants and \(d_{i}\) and \(l_{i}\) are given by
4 Boundary conditions
We consider a normal line load F1 per unit length acting in the positive z-axis on the plane boundary z = 0 along the y-axis and a tangential load F2 per unit length, acting at the origin in the positive x-axis. The appropriate boundary conditions are
-
1.
$$t_{33} \left( {x,z,t} \right) = - F_{1} \psi_{1} \left( x \right)H\left( t \right),$$(28)
-
2.
$$t_{31} \left( {x,z,t} \right) = - F_{2} \psi_{2} \left( x \right)H\left( t \right),$$(29)
-
3.
$$\varphi \left( {x,z,t} \right) = 0,$$(30)
where F1 and F2 are the magnitude of the forces applied, \(\psi_{1} \left( x \right)\, {\text{and}} \, \psi_{2} \left( x \right)\) specify the vertical and horizontal load distribution function along x-axis, and \(H\left( t \right)\) is the Heaviside unit step function and is given by \(H\left( t \right) = \left\{ {\begin{array}{*{20}c} {1,} & { t \ge 0} \\ {0,} & { t < 0} \\ \end{array} } \right.\).
Applying the Laplace and Fourier transform defined by (19) and (20) on the boundary conditions (28)–(30), (13)-(14) and with the help of Eqs. (25)–(27), we obtain the components of displacement, conductive temperature normal stress and tangential stress as,
where
5 Special cases
5.1 Concentrated force
The solution due to concentrated normal force on the half space is obtained by setting
where \(\delta \left( x \right)\) is dirac delta function.
Applying Fourier transform defined by (20) on (37), we obtain
Using (38) in (31)-(36), the components of displacement, stress and conductive temperature are obtained.
5.2 Uniformly distributed force
The solution due to uniformly distributed force applied on the half space is obtained by setting
The Fourier transforms of \(\psi_{1} \left( x \right)\) and \(\psi_{2} \left( x \right)\) with respect to the pair (x, ξ) for the case of a uniform strip load of non-dimensional width 2 m applied at origin of co-ordinate system x = z = 0 in the dimensionless form after suppressing the primes becomes
Using (40) in (31)–(36), the components of displacement, conductive temperature and stress are obtained.
5.3 Linearly distributed force
The solution due to linearly distributed force applied on the half space is obtained by setting
Here 2 m is the width of the strip load, using (15) and applying the transform defined by (20) on (41), we get
Using (42) in (31)-(36), the components of displacement, stress and conductive temperature are obtained.
6 Applications
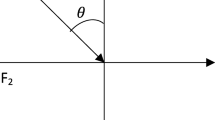
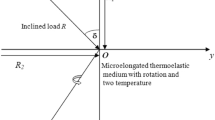
Inclined line load Suppose an inclined load, F0 per unit length is acting on the y-axis and its inclination with z-axis is \(\theta\), we have (Fig. 1)

Inclined load over a transversely isotropic magneto-thermoelastic solid
Using Eq. (43) in Eqs. (31)–(36) and with aid of Eqs. (37)–(42) we obtain the expressions for displacements, conductive temperature and stresses for concentrated force, uniformly distributed force and linearly distributed force on the surface of transversely isotropic magneto-thermoelastic body without energy dissipation.
7 Inversion of the transformation
To find the solution of the problem in physical domain, we must invert the transforms in Eqs. (31)–(36),. Here the displacement components, normal and tangential stresses and conductive temperature are functions of z, the parameters of Laplace and Fourier transforms s and ξ respectively and hence are of the form \({\hat{\text{f}}}\left( {\upxi, {\text{z}}, {\text{s}}} \right)\). To find the function \({\tilde{\text{f}}}\left( {{\text{x}}, {\text{z}}, {\text{t}}} \right)\) in the physical domain, we first invert the Fourier transform using
where fe and fo are respectively the odd and even parts of \(\hat{f}\left( {\xi ,z,s} \right).\) Following Honig and Hirdes [54], the Laplace transform function \(\tilde{f}\left( {x,z,s} \right)\) can be inverted to f(x, z, t) by
The last step is to calculate the integral in Eq. (44). The method for evaluating this integral is described in Press et al. [55]. It involves the use of Romberg’s integration with adaptive step size. This also uses the results from successive refinements of the extended trapezoidal rule followed by extrapolation of the results to the limit when the step size tends to zero.
8 Numerical results and Discussion
In order to illustrate our theoretical results in the proceeding section and to show the effect of two temperature and rotation, we now present some numerical results. Following Dhaliwal and Singh [56], cobalt material has been taken for transversely isotropic thermoelastic material as
Using the above values, the graphical representations of displacement component u, normal displacement w, conductive temperature \(\varphi\), stress components \(t_{11}\), \(t_{13}\) and \(t_{33}\) for transversely isotropic thermoelastic medium have been investigated and the effect of inclination with two temperature has been depicted.
-
1.
The black solid line with square symbols corresponds to transversely isotropic magneto-thermoelastic medium with \(\varOmega = 0.5,\theta = 0^\circ\) and a1 = 0.0, a3 = 0.0 i.e. without two temperature.
-
2.
The red solid line with circle symbols corresponds to transversely isotropic magneto-thermoelastic medium with \(\varOmega = 0.5\),\(\theta = 45^\circ\) and a1 = 0.0, a3 = 0.0 i.e. without two temperature.
-
3.
The green solid line with circle symbols corresponds to transversely isotropic magneto-thermoelastic medium with \(\varOmega = 0.5\),\(\theta = 0^\circ\) and a1 = 0.02, a3 = 0.040 i.e. with two temperature.
-
4.
The blue solid line with diamond symbols corresponds to transversely isotropic magneto-thermoelastic medium with \(\varOmega = 0.5\),\(\theta = 45^\circ\) and a1 = 0.02, a3 = 0.040 i.e. with two temperature.
8.1 Event 1: Concentrated force due to inclined load and with and without two temperature and with rotation
Figures 2 and 3 shows the variations of the displacement component u and w for transversely isotropic magneto-thermoelastic medium with and without two temperature and rotation respectively. The values of displacement component u and w decreases for without two temperure and increases for with two temperature for the initial values of distance and follow oscillatory pattern for rest of the range of distance. Figure 4 represents the variations of the conductive temperature \(\varphi\) for transversely isotropic magneto-thermoelastic medium with and without two temperature and with rotation. The values of conductive temperature \(\varphi\), first increases for the range \(0 \le x \le 2\) and then follow small oscillatory pattern for rest of the range of distance for both with and without two temperature. Figure 5 represents the values of stress component \(t_{11}\)., the values of \(t_{11}\) f or \(\theta = 0^\circ\) follow oscillatory pattern with smaller amplitude whereas for \(\theta = 45^\circ\) it follows oscillatory pattern with larger amplitude. Figure 6 describes the variations of stress component \(t_{13}\). Near the loing surface, the values of \(t_{13 }\) decrease sharply and then somehow oscillates. Figure 7 interprets the variations of stress component \(t_{33}\). The values decrease sharply near the loading surface with \(\theta = 0^\circ\) and increase sharply near the loading surface with \(\theta = 45^\circ\) and then follow small oscillatory pattern for rest of the range for both with and without two temperature.

Variations of displacement component u with distance x

Variations of displacement component w with distance x

Variations of conductive temperature φ with distance x

Variations of stress component t11 with distance x

Variations of stress component t13 with distance x

Variations of stress component t33 with distance x
8.2 Event 2: Uniformly distributed force due to inclined load and with and without two temperature and with rotation
Figure 8 shows the variations of the displacement component u for uniformly distributed force for transversely isotropic magneto-thermoelastic medium with and without two temperature and with fixed rotation. The values of displacement component u, first increases for the range \(0 \le x \le 2\) and for \(\theta = 0^\circ ,\) a1 = 0.0, a3 = 0.0 while for this range it first decreases for \(\theta = 45^\circ\), a1 = 0.0, a3 = 0.0 and \(\theta = 0^\circ\), a1 = 0.02, a3 = 0.04; \(\theta = 45^\circ ,\) a1 = 0.02, a3 = 0.04 for the initial values of distance and then for all four cases follows oscillatory pattern, for rest of the range of distance. Figure 9 depicts variations of the displacement component w for transversely isotropic magneto-thermoelastic medium with and without two temperature and with rotation. For the range \(0 \le x \le 3\), the values of displacement component w, increases for \(\theta = 0^\circ\) and for both with and without two temperature and then oscillates; while it decreases for \(\theta = 45^\circ\) and for both with and without two temperature for the initial values of distance and then follow small oscillatory pattern for rest of the range of distance for both with and without two temperature. Figure 10 represents the variations of the conductive temperature \(\varphi\) for transversely isotropic magneto-thermoelastic medium with and without two temperature and with rotation. The values of conductive temperature \(\varphi\), first decreases for \(\theta = 0^\circ\), a1 = 0.0, a3 = 0.0 then follow small oscillatory pattern for rest of the range of distance and for rest of three cases it first increases and then follows small oscillatory pattern. Figure 11 represents the values of stress component \(t_{11}\). Near the loading surface, the values of \(t_{11}\) decrease and then follows oscillatory pattern. Figure 12 describes the variations of stress component \(t_{13}\). Near the loading surface, and for \(\theta = 0^\circ\), a1 = 0.0, a3 = 0.0 the values of \(t_{13 }\) sharply decreases and for rest cases it increases for the range \(0 \le x \le 2\) and then somehow oscillates for all the cases. Figure 13 interprets the variations of stress component \(t_{33}\). Near the loading surface, the values of \(t_{33}\) decrease and then follows oscillatory pattern for all the four cases considered above.

Variations of displacement component u with distance x

Variations of displacement component w with distance x

Variations of conductive temperature φ with distance x

Variations of stress component t11 with distance x

Variations of stress component t13 with distance x

Variations of stress component t33 with distance x
8.3 Event 3: Linearly distributed force due to inclined load and with and without two temperature and with rotation
Figure 14 shows the variations of the displacement component u for transversely isotropic magneto-thermoelastic medium with linearly distributed force and with and without two temperature and with rotation. The values of displacement component u, increases somehow for \(\theta = 0^\circ\), a1 = 0.0, a3 = 0.0 and it decreases for rest all the cases in the initial values of distance and then follow an oscillatory pattern. Figure 15 shows the variations of the displacement component w for transversely isotropic magneto-thermoelastic medium with linearly distributed force and with and without two temperature and with rotation. The values of displacement component w, sharply increases for \(\theta = 0^\circ\) in the initial values of distance and decreases for \(\theta = 45^\circ\) and follow small oscillatory pattern for rest of the range of distance. Figure 16 represents the variations of the conductive temperature \(\varphi\) for transversely isotropic magneto-thermoelastic medium with linearly distributed force and with and without two temperature and rotation. The values of conductive temperature \(\varphi\), decreases for \(\theta = 0^\circ ,\) a1 = 0.0, a3 = 0.0 sharply increases for rest of the three cases in the initial values of distance and follow small revere oscillatory pattern for \(\theta = 0^\circ and \theta = 45^\circ\) in rest of the range of distance. Figure 17 represents the values of stress component \(t_{11}\). From the initial range if distance, \(t_{11}\) show the large oscillation. Figure 18 describes the variations of stress component \(t_{13}\). Near the loading surface, the values of \(t_{13 }\) decrease sharply and then somehow oscillates. Figure 19 interprets the variations of stress component \(t_{33}\).The values increase sharply near the loading surface when \(\theta = 45^\circ\) and decrease for \(\theta = 0^\circ\) with all the values of two temperatures then small oscillatory pattern for rest of the range.

Variations of displacement component u with distance x

Variations of displacement component w with distance x

Variations of conductive temperature φ with distance x

Variations of stress component t11 with distance x

Variations of stress component t13 with distance x

Variations of stress component t33 with distance x
9 Conclusions
From above investigation, it is observed that the magnetic effect of two temperature, rotation as well as the angle of inclination of the applied load plays a major role in the distribution of all the physical quantities. The amplitude of all the physical quantities differ (either increase or decrease) with and without two temperature as well as the angle of inclined load. Two temperature plays a major role for the oscillation of physical quantities near the point of application of source as well as away from the source. In presence and absence of two temperature and inclined load, the displacement components and stress components show an oscillatory nature with respect to x. The inclined load plays a significant role in the distribution of all the physical quantities. The concentrated and uniformly distributed force show more effect on stress component. The result gives an inspiration to study magneto-thermoelastic materials as an innovative domain of applicable thermoelastic solids. The results of this paper become useful for those researchers who works in material science, inventers of new materials, in addition to those working on the magneto-thermoelasticity and in real life as in geophysics, acoustics, geomagnetic etc. The proposed methods in this research is relevant to a wide range of problems in thermodynamics and thermoelasticity.
References
Chen PJ, Gurtin EM (1968) On a theory of heat conduction involving two temperatures. Z Angew Math Phys 19(4):614–627
Chen PJ, Gurtin ME, Williams WO (1968) A note on non-simple heat conduction. Zeitschrift für Angewandte Mathematik und Physik ZAMP 19(4):969–970
Chen PJ, Gurtin EM, Williams OW (1969) On the thermodynamics of non-simple elastic materials with two temperatures. Z Angew Math Phys 20(1):107–112
Ailawalia P, Narah NS (2009) Effect of rotation in generalized thermoelastic solid under the influence of gravity with an overlying infinite thermoelastic fluid. Appl Math Mech (English Edition) 30(12):1505–1518
Ailawalia P, Kumar S, Pathania D (2010) Effect of rotation in a generalized thermoelastic medium with two temperature under hydrostatic initial stress and gravity. Multidiscip Model Mater Struct (Emerald) 6(2):185–205
Marin M (1997) Cesaro means in thermoelasticity of dipolar bodies. Acta Mech 122(1–4):155–168
Sharma JN, Kaur D (2010) Rayleigh waves in rotating thermoelastic solids with voids. Int J Appl Math Mech 6(3):43–61
Alla AMA, Abo-Dahab T, Al-Thamali A (2012) Propagation of Rayleigh waves in a rotating orthotropic material elastic half-space under initial stress and gravity. J Mech Sci Technol 26(9):2815–2823
Singh B, Yadav AK (2012) Plane waves in a transversely isotropic rotating magnetothermoelastic medium. J Eng Phy Thermophys 85(5):1226–1232
Banik S, Kanoria M (2012) Effects of three-phase-lag on two-temperature generalized thermoelasticity for infinite medium with spherical cavity. Appl Math Mech 33(4):483–498
Mahmoud S (2012) Influence of rotation and generalized magneto-thermoelastic on Rayleigh waves in a granular medium under effect of initial stress and gravity field. Meccanica 47:1561–1579
Abd-Alla A-E-NN, Alshaikh F (2015) The Mathematical model of reflection of plane waves in a transversely isotropic magneto-thermoelastic medium under rotation. In: New developments in pure and applied mathematics. pp 282–289. ISBN: 978-1-61804-287-3
Marin M, Agarwal RP, Mahmoud SR (2013) Modeling a microstretch thermoelastic body with two temperatures. Abstr Appl Anal 2013:1–7
Mahmoud SR, Marin M, Al-Basyouni KS (2015) Effect of the initial stress and rotation on free vibrations in transversely isotropic human long dry bone. Analele Stiintifice ale Universitatii Ovidius Constanta 23(1):171–184
Sharma N, Kumar R, Lata P (2015) Disturbance due to inclined load in transversely isotropic thermoelastic medium with two temperatures and without energy dissipation. Mater Phys Mech 22:107–117
Shaw S, Mukhopadhyay B (2015) Electromagnetic effects on wave propagation in an isotropic micropolar plate. J Eng Phys Thermophys 88(6):1537–1547
Kumar R, Sharma N, Lata AP (2016) Effects of Hall current in a transversely isotropic magnetothermoelastic with and without energy dissipation due to normal force. Struct Eng Mech Int J 57(1):91–103
Bijarnia R, Singh B (2016) Propagation of plane waves in a rotating transversely isotropic two temperature generalized thermoelastic solid half-space with voids. Int J Appl Mech Eng 21(2):285–301
Kumar R, Sharma N, Lata P (2016) Thermomechanical interactions due to hall current in transversely isotropic thermoelastic with and without energy dissipation with two temperatures and rotation. J Solid Mech 8(4):840–858
Lata P, Kumar R, Sharma N (2016) Plane waves in an anisotropic thermoelastic. Steel Compos Struct 22(3):567–587
Mona K, Khader SE (2017) A Problem in Thermoelasticity with and without Energy Dissipation. J Phys Math 8(3):5
Kumar R, Manthena VR, Lamba NK, Kedar GD (2017) Generalized thermoelastic axi-symmetric deformation problem in a thick circular plate with dual phase lags and two temperatures. Mater Phys Mech 32:123–132
Ezzat MA, Karamany ASE, A. El-Bary A (2017) Thermoelectric viscoelastic materials with memory-dependent derivative. Smart Struct Syst Int J 19(5):539–551
Kumar R, Sharma N, Lata P, Abo-Dahab ASM (2017) Rayleigh waves in anisotropic magnetothermoelastic medium. Coupl Syst Mech 6(3):317–333
Marin M, Öchsner A (2017) The effect of a dipolar structure on the Hölder stability in Green-Naghdi thermoelasticity. Continuum Mech Thermodyn 29:1365–1374
Lata P (2018) Effect of energy dissipation on plane waves in sandwiched layered thermoelastic medium. Steel Compos Struct Int J 27(4):439–451
Ezzat M, El-Barrry AA (2017) Fractional magneto-thermoelastic materials with phase-lag Green-Naghdi theories. Steel Compos Struct Int J 24(3):297–307
Abo-Dahab SM, Jahangir, Abd-alla A, A-E-N (2018) Reflection of plane waves in thermoelastic microstructured materials under the influence of gravitation. In: Continuum mechanics and thermodynamics, pp 1–13
Ezzat MA, El-Bary AAA (2017) A functionally graded magneto-thermoelastic half space with memory-dependent derivatives heat transfer. Steel Compos Struct Int J 25(2):177–186
Hassan M, Marin M, Alsharif A, Ellahi R (2018) Convective heat transfer flow of nanofluid in a porous medium over wavy surface. Phys Lett Sect A Gen Atom Solid State Phys 382(38):2749–2753
Othman MIA, Khan A, Jahangir R, Jahangir A (2019) Analysis on plane waves through magneto-thermoelastic microstretch rotating medium with temperature dependent elastic properties. Appl Math Model 65:535–548
Marin M (1997) On weak solutions in elasticity of dipolar bodies with voids. J Comput Appl Math 82(1–2):291–297
Marin M, Baleanu D (2016) On vibrations in thermoelasticity without energy dissipation for micropolar bodies. Boundary Value Problems. Springer, Berlin, p 111
M. Marin (2008) Weak solutions in elasticity of dipolar porous materials. Mathe Problems Eng 1–8
Ezzat M, El-Karamany A, El-Bary A (2016) Generalized thermoelasticity with memory-dependent derivatives involving two temperatures. Mech Adv Mater Struct 23(5):545–553
Ezzat MA, El-Karamany AS, Ezzat SM (2012) Two-temperature theory in magneto-thermoelasticity with fractional order dual-phase-lag heat transfer. Nucl Eng Des 252:267–277
Ezzat M, El-Karamany A, El-Bary A (2015) Thermo-viscoelastic materials with fractional relaxation operators. Appl Math Model 39(23):7499–7512
Marin M, Stan G (2013) Weak solutions in Elasticity of dipolar bodies with stretch. Carpath J Math 29(1):33–40
Ezzat M, AI-Bary A (2016) Magneto-thermoelectric viscoelastic materials with memory dependent derivatives involving two temperature. Int J Appl Electromagnet Mech 50(4):549–567
Ezzat M, AI-Bary A (2017) Fractional magneto-thermoelastic materials with phase lag Green-Naghdi theories. Steel Compos Struct 24(3):297–307
Ezzat MA, El-Karamany AS, El-Bary AA (2017) Two-temperature theory in Green-Naghdi thermoelasticity with fractional phase-lag heat transfer. Microsyst Technol Spring Nat 24(2):951–961
Chauthale S, Khobragade NW (2017) Thermoelastic response of a thick circular plate due to heat generation and its thermal stresses. Glob J Pure Appl Math 13:7505–7527
Marin M (1998) Contributions on uniqueness in thermoelastodynamics on bodies with voids. Revista Ciencias Matematicas (Havana) 16(2):101–109
Marin M (2009) On the minimum principle for dipolar materials with stretch. Nonlinear Anal Real World Appl 10(3):1572–1578
Marin M (2010) A partition of energy in thermoelasticity of microstretch bodies. Nonlinear Anal Real World Appl 11(4):2436–2447
Kumar R, Kaushal P, Sharma R (2018) Transversely isotropic magneto-visco thermoelastic medium with vacuum and without energy dissipation. J Solid Mech 10(2):416–434
Lata P, Kaur I (2019) Transversely isotropic thick plate with two temperature and GN type-III in frequency domain. Coupl Syst Mech-Techno Press 8(1):55–70
Lata P, Kaur I (2019) Study of transversely isotropic thick circular plate due to ring load with two temperature & green nagdhi theory of type-I, II and III. In: International conference on sustainable computing in science, technology & management (SUSCOM-2019). Elsevier SSRN, Amity University Rajasthan, Jaipur, India
Lata P, Kaur I (2019) Thermomechanical Interactions in transversely isotropic thick circular plate with axisymmetric heat supply. Struct Eng Mech 69(6):607–614
Green AP (1992) On undamped heat waves in an elastic solid. J Therm Stresses 15(2):253–264
Schoenberg M, Censor D (1973) Elastic waves in rotating media. Q Appl Math 31:115–125
Lord HW, Shulman AY (1967) The generalized dynamical theory of thermoelasticity. J Mech Phys Solids 15(5):299–309
Slaughter WS (2002) The linearized theory of elasticity. Birkhäuser, Basel
Honig G, Hirdes U (1984) A method for the numerical inversion of Laplace transform. J Comput Appl Math 10:113–132
Press WH, Teukolshy SA, Vellerling WT, Flannery BP (1986) Numerical recipes in Fortran. Cambridge University Press, Cambridge
Dhaliwal RS, Sherief HH (1980) Generalized thermoelasticity for anisotropic media. Q Appl Math 37(1):1–8
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kaur, I., Lata, P. Transversely isotropic magneto thermoelastic solid with two temperature and without energy dissipation in generalized thermoelasticity due to inclined load. SN Appl. Sci. 1, 426 (2019). https://doi.org/10.1007/s42452-019-0438-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-019-0438-z
Keywords
- Transversely isotropic thermoelastic
- Magneto thermoelastic solid
- Laplace and fourier transform
- Concentrated and distributed sources
- Inclined load