
Abstract
This paper deals with the problem of the state estimation and the sensor faults detection for nonlinear perturbed systems described by Takagi-Sugeno (T-S) fuzzy models with unmeasurable premise variables. Indeed, a T-S observer is synthesized, in descriptor form, to estimate both the system states and the sensor faults simultaneously. The idea of the proposed approach is to introduce the sensor fault as an auxiliary variable in the state vector. Besides, the T-S model with unmeasurable premise variables is reduced to a perturbed model with measurable variables. Convergence conditions are established with Lyapunov theory and the H ∞ performance in order to guarantee the best robustness to disturbances. These conditions are expressed in terms of linear matrix inequalities (LMIs). The parameters of the observer are computed using the solution of the LMI conditions. Finally, a numerical example is given to illustrate the design procedures. Simulation results show the satisfactory performances.
Similar content being viewed by others


1 Introduction
In most practical control systems, unexpected faults or failures are often unknown and occur at uncertain time in most cases. These malfunctions may lead to degradation of performance and even to system instability. To improve the reliability of such systems, research on faults detection and isolation has received considerable attention in the past two decades (see [1 – 4]). Specially, several researches have exploited the fuzzy modeling approach for control and diagnosis of nonlinear systems (see [5 – 9]). Indeed, the main feature of a Takagi-Sugeno (T-S) fuzzy model is based on the interpolation of linear sub-models by nonlinear weighting functions satisfying the convex sum property. These sub-models represent local behaviors of the nonlinear system. Therefore, the T-S fuzzy model has proven to be a powerful tool in the analysis and identification of nonlinear and complex system[10–12].
Very interesting approaches were proposed for diagnosis of T-S fuzzy systems subject to sensor and actuator faults by using different techniques. These techniques include sliding mode observer, piecewise Lyapunov functions, linear matrix inequality (LMI) approach, fuzzy descriptor approach, adaptive thresh-old technique and bounded-error approach (BEA algorithm) (see [13 – 17]). Special attention was given to the diagnosis of T-S fuzzy systems with H ∞performance[4,18]. In [14], a robust observer was presented and applied to electro-mechanical pitch drive systems of wind. The synthesis of this observer is based on faults detection approach combined with the sliding mode for T-S fuzzy systems. The problem of H ∞ fuzzy observer based nonparallel distributed compensation (Non-PDC) controller design for uncertain T-S fuzzy systems with external disturbances was proposed in [19]. This is done using a fuzzy Lya-punov function and the descriptor redundancy approach. The authors in [20] developed a singular approach to design an observer for T-S fuzzy systems with unknown output disturbance and its application to estimate sensor faults. The singular approach was also developed in [18] to investigate H_/H ∞ faults estimation and detection for T-S fuzzy systems with unknown bounded disturbance. The problem is solved with a sufficient conditions based on an iterative LMI procedure[21]. In [22] a fuzzy adaptive backstepping output feedback control was constructed for a class of nonlinear systems with unknown time-delay based on a fuzzy observer to estimate unmeasured states. The authors in [23] proposed a robust fault detection approach for nonlinear systems using Lyapunov techniques and provided a sufficient condition for the existence of a robust observer.
In this study, motivated by the work in [24], we use the fuzzy descriptor approach to investigate sensor faults estimation with unmeasurable premise variables of T-S fuzzy system affected by unknown bounded disturbance. By considering the sensor faults term as an auxiliary state vector, an augmented descriptor system is constructed. A suitable Lyapunov matrix in the form of LMI is used to find out the gains of the fuzzy observer with H ∞ performance without recourse to the hard calculation of block matrix inversion which gives nonlinear and complex terms like in [24].
The outline of this paper is as follows. In Section 2, the class of studied systems and a background results are given. Robust fault detection based-observer design with unmeasurable premise variables is given in Section 3. Section 4 presents an example to illustrate the effectiveness of the proposed method. Concluding remarks are given in Section 5.
Notation. X T and X −1 are the transpose and the inverse of matrix X, respectively. Sym(X) = X + X T. I is the identity matrix with appropriate dimension.
2 System description and background results
Consider the nonlinear system described by the following fuzzy IF-THEN rules:
Rule i:
IF ξ 1(t) is M 1i and, ⋯ , and ξ g (t) is M si , THEN
where x(t) ∈ R n is the state vector, u(t) ∈ R m is the input vector and y(t) ∈ R p is the output vector. A i , B i and C are constant real matrices with appropriate dimensions. ξ j (j = 1, ⋯ , s) are the fuzzy sets and r is the number of rules.
By fuzzy blending, the overall fuzzy model with sensor faults f s(t) and affected by unknown bounded disturbance d(t) is inferred as follows:
where
Hence, µ i (ξ(t)) satisfies
where B d and D s are matrices with appropriate dimensions. For sake of simplicity, the time variable (t) is omitted in the followings.
In order to estimate state vector x and sensor fault f s , an augmented system is constructed using the descriptor technique. Then the T-S fuzzy system (2) can be written as follows:
where
Vector x s is considered as an auxiliary state of the augmented system (3). So if the state estimation of the augmented system (3) exists, then the state estimation of the original system (3) and the fault estimation exist too.
Based on this model, the following fuzzy observer structure is adopted
where z ∈ R n+p is an auxiliary state vector of the observer and \(\hat \bar x \in {{\mathbf{R}}^{n + p}}\) is the state estimation of (3).
Lemma 1[24]. If there exist positive definite symmetric matrices P 1 and P 2, matrix R, non singular matrix M and scalar γ > 0 such that the following LMI is satisfied for i = 1, ⋯ ,r,

then there exist a fuzzy observer in the form (4) to asymptotically estimate the state and fault sensor for fuzzy system (2). The observer parameters are given by
where
Remark 1. Conditions (5)–(10) in Lemma 1 were obtained by using Lyapunov techniques. This approach requires the calculation of the inverse of matrix E which yields nonlinear and complex terms. Moreover, the approach uses a diagonal Lyapunov matrix in the form P = diag(P 1,P 2) which is too restrictive.
Remark 2. The T-S model representation is very interesting since it allows to simplify the stability analysis of nonlinear systems. In [18,20,24], the authors used the tools inspired directly by the study of linear systems. In [25,26] the authors worked on the problem of state estimation and application for diagnosis of T-S fuzzy systems. However, they assumed that the premise variable ξ(t) is measurable, i.e., ξ(t) = u(t) or ξ(t) = y(t). In the diagnosis problem, this hypothesis imposes to conceive a bank of observers based on multiple models whose weighting functions depend on the input u(t), for the detection and isolation of the sensor faults, or on the output y(t) for the detection and isolation of the actuator fault. This requires the elaboration of two different T-S models for the same nonlinear system. Hence, it is interesting to develop only one T-S model which considers the system state as premise variable. This is the case of the present paper. Thus, in the next section we develop an observer to estimate the system state and the sensor fault for the system with weighting functions depending on the system state. The observer weighting functions will depend on the measurements.
3 Design of robust descriptor observer with unmeasurable premise variables
In this section, we assume that the weighting functions that depend on the system state, then system (2) becomes
Adding and subtracting the term \(\sum {_{i = 1}^r\left( {{\mu _i}(\hat x)} \right)\left( {{A_i}x + {B_i}u} \right)} \), we obtain the following equivalent system with the weighting functions depending on the estimated state.
where
The global system (12) can be rewritten as follows
where 
In the augmented form, model (13) becomes
where
Let us consider the following fuzzy observer with unmea-surable premise variables
where z ∈ R n +p is an auxiliary state vector of the observer and \(\hat \bar x \in {{\mathbf{R}}^{n + p}}\) is the state estimation of (3). By substituting \(z = \hat \bar x - L\bar C\bar x = \hat \bar x - L{C_0}\bar x - L{x_s}\) into the differential algebraic equation of (4), we obtain
Subtracting (16) from (3) yields
Let the error estimation be defined by \(\bar e = \bar x - \hat \bar x\), and suppose that
The error dynamic can then be written as follows
Notice that substituting (20) into (19) one gets
Considering (19) and taking account of the expression of Ā i above we get
from which a unique choice of L follows as L 1 = 0 and L 2 = I p or
Therefore, condition (18) becomes
from which we get
Let R = E 12 and M = E 22 ; then E becomes
with  .
.
Matrices R and M can be chosen in such a way that E is invertible.
Then, the error dynamic (21) becomes
where
The following definition is borrowed from [27] with some adaptation concerning the initial conditions.
Definition 1 (H ∞ Problem). Given a real positive scalar γ, find the observer parameters such that the estimation error \(\bar e = \bar x - \hat \bar x\) is asymptotically stable with v(t) = 0 and the L 2 gain between v(t) and ē satisfies

where Φ(0) is a positive scalar depending on the initial conditions.
Notice that when Φ(0) = 0, that is, the case of null initial condition we get the standard expression used for the L 2 gain approach.
To satisfy the stabilization conditions of system (25), we propose Theorem 1 below.
Theorem 1. The T-S fuzzy system (25) is asymptotically stable and satisfies the H ∞ performances, if there exist a positive definite symmetric matrix X and a matrix Y such that the following LMI is satisfied, for i = 1, ⋯ , r

The observer parameters R and M are then given by

Proof. Consider the following Lyapunov function V(ē) = ē T Pē with P > 0 and a positive scalar γ such the following condition

holds.
Therefore, integrating the inequality above from zero to +∞, we get

from which we get

and since V(·) is positive it comes that (27) is satisfied and the system achieves an H ∞ bound less than γ.
Therefore, to satisfy (29) we have

from which we deduce that

is a sufficient condition to satisfy (29).
From (26), we can write

Note that matrix E depends on the unknown matrices R and M and to make the computation easier we have to get rid of the term E −1 and get as a consequence an LMI where R and M will be the decision variables. For this purpose, we rewrite (31) as follows:

and we proceed to a change of variable X = E – T PE −1 to get

Using (24), it comes then that condition (33) becomes

Since E is invertible and P > 0 so X is a positive definite and symmetric matrix.
Unfortunately, condition (28) is still not an LMI with respect to K. Therefore, to get an LMI condition we have to consider the change of variable Y = XK. Then, condition (28) becomes

To compute the observer parameters, the following procedure is proposed.
-
1)
For a given γ, compute matrices X and Y by solving LMI (28).
-
2)
Compute matrix K = X −1 Y.
-
3)
Deduce the observer gains F i , L and E from (22), (23), and (24), respectively.
The sensor faults estimation is defined by

Remark 3. Comparing the obtained result with [24], we can see that in the present work a systematic method is provided in order to compute the observer parameters. The proposed method introduces more degrees of freedom by means of two additional variables, which may lead to less conservatism.
4 Numerical example
In order to illustrate the effectiveness of the proposed approach, we consider an academic T-S system in the form of (2) with the following matrices:
The membership functions for rules 1 and 2 are
For a given γ = 0.68, we apply Theorem 1 and we get a feasible solution for LMI (28) as follows:
Matrices M and R are deduced from the equality K T = [R T M T] . The observer parameters are then computed from (22), (23) and (24) as follows:

We suppose the sensor fault in the following form:
where
and the input u = 0.1sin(t).
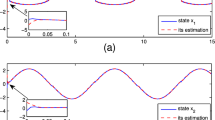
By applying Theorem 1, we obtain a set of feasible solutions. The descriptor observer provides the estimated states and faults. Figs. 1–3 show the state variables and their estimation. The sensor fault estimation is presented in Figs. 4 and 5. Fig. 6 shows the estimation of the weighting functions. By examining the different curves, we can say that the estimation quality of the system states and the sensors faults provides a satisfying result despite the presence of unknown bounded disturbance given by Fig. 7.

Variable state x 1 and its estimate

Variable state x 2 and its estimate

Variable state x 3 and its estimate

Sensor fault f s1 and its estimate

Sensor fault f s 2 and its estimate

Weighting functions µ 1 (\({\mu _1}(\hat x)\)) and µ 2 (\({\mu _1}(\hat x)\))

Disturbance d
5 Conclusions
This paper presents a robust observer with unmeasurable premise variables for the T-S fuzzy model affected by sensor faults and bounded input disturbances using descriptor technique. In order to decouple the sensor faults, an augmented descriptor model has been constructed by assuming the sensor faults as an auxiliary state variable and the simultaneous estimates of the original state and sensor faults are thus obtained. The convergence of the proposed observer has been performed by the search of suitable Lyapunov matrices. The main results are formulated in the form of LMI with the H ∞ criterion. Finally, simulation results are presented to verify the effectiveness of the proposed method. The proposed observer can be extended to a technique for actuator fault estimation and fault tolerant control.
References
R. J. Patton, J. Chen. Observer-based fault detection and isolation: Robustness and applications. Control Engineering Practice, vol. 5, no. 5, pp. 671–682, 1997.
E. G. Nobrega, M. O. Abdalla, K. M. Grigoriadis. Robust fault estimation of uncertain systems using an LMI-based approach. International Journal of Robust and Nonlinear Control, vol. 18, no. 18, pp. 1657–1680, 2008.
T. C. Wang, S. C. Tong. Robust fuzzy fault-tolerant control for nonlinear systems. In Proceedings of the 3rd International Conference on Innovative Computing Information and Control, IEEE, Dalian, China, pp. 117, 2008.
D. J. Lee, Y. Park, Y. S. Park. Robust H ∞ sliding mode descriptor observer for fault and output disturbance estimation of uncertain systems. IEEE Transactions on Automatic Control, vol. 57, no. 11, pp. 2928–2934, 2012.
M. H. Asemani, V. J. Majd. A robust H ∞ observer-based controller design for uncertain T-S fuzzy systems with unknown premise variables via LMI. Fuzzy Sets and Systems, vol. 212, pp. 21–40, 2013.
C. S. Tseng, B. S. Chen, Y. F. Li. Robust fuzzy observer-based fuzzy control design for nonlinear systems with persistent bounded disturbances: A novel decoupled approach. Fuzzy Sets and Systems, vol. 160, no. 19, pp. 2824–2843, 2009.
S. C. Tong, H. H. Li. Observer-based robust fuzzy control of nonlinear systems with parametric uncertainties. Fuzzy Sets and Systems, vol. 131, no. 2, pp. 165–184, 2002.
X. D. Li, Q. L. Zhang. New approaches to H ∞ controller designs based on fuzzy observers for T-S fuzzy systems via LMI. Automatica, vol. 39, no. 9, pp. 1571–1582, 2003.
C. Lin, Q. G. Wang, T. H. Lee, Y. He, B. Chen. Observer-based H ∞ fuzzy control design for T-S fuzzy systems with state delays. Automatica, vol. 44, no. 3, pp. 868–874, 2008.
X. Li, X. P. Zhao, J. Chen. Controller design for electric power steering system using T-S fuzzy model approach. International Journal of Automation and Computing, vol. 6, no. 2, pp. 198–203, 2009.
K. Tanaka, H. Ohtake, H. O. Wang. A descriptor system approach to fuzzy control system design via fuzzy Lyapunov function. IEEE Transactions on Fuzzy Systems, vol.15, no. 3, pp. 333–341, 2007.
M. L. Hadjili, K. Kara. Modelling and control using Takagi-Sugeno fuzzy models. In Proceedings of 2011 Saudi International Electronics, Communications and Photonics Conference, IEEE, Riyadh, Saudi, pp. 1–6, 2011.
A. Akhenak, M. Chadli, J. Ragot, D. Maquin. Fault detection and isolation using sliding mode observer for uncertain Takagi-Sugeno fuzzy model. In Proceedings of the 16th Mediterranean Conference on Control and Automation, IEEE, Ajaccio, France, pp. 286–291, 2008.
H. Schulte, M. Zajac, S. Georg. Takagi-Sugeno sliding mode observer design for load estimation and sensor fault detection in wind turbines. In Proceedings of 2012 IEEE International Conference on Fuzzy Systems, IEEE, Brisbane, Australia, pp. 1–8, 2012.
K. Zhang, B. Jiang, P. Shi. Fault estimation observer design for discrete-time Takagi-Sugeno fuzzy systems based on piecewise Lyapunov functions. IEEE Transactions on Fuzzy Systems, vol. 20, no.1, pp. 192–200, 2012.
X. H. Chang, G. H. Yang. A descriptor representation approach to observer-based H ∞ control synthesis for discrete-time fuzzy systems. Fuzzy Sets and Systems, vol. 185, no. 1, pp. 38–51, 2011.
M. Kowal, J. Korbicz. Fault detection under fuzzy model uncertainty. International Journal of Automation and Computing, vol. 4, no. 2, pp. 117–124, 2007.
M. Bouattour, M. Chadli, M. Chaabane, A. El Hajjaji. Design of robust fault detection observer for Takagi-Sugeno models using the descriptor approach. International Journal of Control, Automation and Systems, vol. 9, no. 5, pp. 973–979, 2011.
M. H. Asemani, V. L. Majd, S. Mobayen. Robust H ∞ observer-based control of uncertain T-S fuzzy systems with control constraints. In Proceedings of the 20th Iranian Conference on Electrical Engineering, IEEE, Tehran, Iran, pp. 910–915, 2012.
Z. W. Gao, X. Y. Shi, S. X. Ding. Fuzzy state/disturbance observer design for T-S fuzzy systems with application to sensor fault estimation. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, vol. 38, no. 3, pp. 875–880, 2008.
S. Boyd, L. El Ghaoui, E. Feron, V. Balakrishnan. Linear Matrix Inequalities in System and Control Theory, Philadelphia, PA: SIAM, 1994.
S. C. Tong, N. Sheng. Adaptive fuzzy observer backstepping control for a class of uncertain nonlinear systems with unknown time-delay. International Journal of Automation and Computing, vol. 7, no. 2, pp. 236–246, 2010.
M. Z. Chen, Q. Zhao, D. H. Zhou. A robust fault detection approach for nonlinear systems. International Journal of Automation and Computing, vol. 3, no. 1, pp. 23–28, 2006.
M. Bouattour, M. Chadli, A. El Hajjaji, M. Chaabane. H ∞ sensor faults estimation for T-S models using descriptor techniques: Application to fault diagnosis. In Proceedings of the IEEE International Conferences on Fuzzy Systems, IEEE, Jeju Island, Korea, pp. 251–255, 2009.
H. Ghorbel, M. Souissi, M. Chaabane, A. El Hajjaji. Observer design for fault diagnosis for the Takagi-Sugeno model with unmeasurable premise variables. In Proceedings of the 20th Mediterranean Conference on Control & Automation, IEEE, Barcelona, pp. 303–308, 2012.
D. Ichalal, B. Marx, J. Ragot, D. Maquin. An approach for the state estimation of Takagi-Sugeno models and application to sensor fault diagnosis. In Proceedings of the 48th IEEE Conference on Decision and Control, 2009 Held Jointly with the 28th Chinese Control Conference (CDC/CCC 2009), IEEE, Shanghai, China, pp. 789–7794, 2009.
W. M. Lu, J. C. Doyle. H∞ control of nonlinear systems via output feedback: Controller parameterization. IEEE Transactions on Automatic Control, vol. 39, no. 12, pp. 2517–2521, 1994.
Author information
Authors and Affiliations
Corresponding author
Additional information
Imen Haj Brahim received the master degree in automatic control and industrial computing from the University of Sfax, Tunisia in 2010. Currently, she is a Ph. D. candidate in electrical engineering at the National Engineering School of Sfax (ENIS) and an associate researcher in the Laboratory of Sciences and Techniques of Automatic & Computer Engineering Lab-STA, University of Sfax.
Her research interests include robust observer and fault tolerant control for Takagi-Sugeno fuzzy models as well as singular systems.
Maha Bouattour received the master degree in electrical engineering from the University of Sfax, Tunisia in {dy2005}, and a joint Ph. D. degree in electrical engineering from the University of Picardie Jules Verne, France, and the University of Sfax in 2010. She is an associate professor with the Laboratory of Sciences and Techniques of Automatic & Computer Engineering Lab-STA, National Engineering School of Sfax (ENIS), University of Sfax.
Her research interests include fuzzy control and fault tolerant control.
Driss Mehdi received an engineer degree from Mohammadia Engineering School, Rabat, Morocco in {dy1979} and a Ph.D. degree in automatic control from Nancy University, France in 1986. He was a senior lecturer from {dy1988} to {dy1992} at Louis Pasteur University in Strasbourg and since {dy1992} he has been professor at the University of Poitiers.
His research interests include automatic control, robust control, delay and descriptor systems.
Mohamed Chaabane is currently a professor in automatic control at National School of Engineers of Sfax (ENIS), Tunisia. He received his doctorate degree in electrical engineering from the University of Nancy, France in 1991. He was associate professor at the University of Nancy and was a researcher at the Center of Automatic Control of Nancy (CRAN) from 1988-1992. Since {dy1997}, he has been holding a research position at Laboratory of Sciences and Techniques of Automatic Control & Computer Engineering (Lab-STA), ENIS. Currently, he is an associate editor of International Journal on Sciences and Techniques of Automatic Control & Computer Engineering (IJ-STA) (www.sta-tn.com).
His research interests include robust and optimal control, delay systems, descriptor systems.
Ghani Hashim is currently a lecturer at Cihan University, Erbil, Iraq. He received a Ph. D. degree in control engineering from Nancy University, Nancy, France.
His research interests include identification and control of linear system as well as fuzzy control and fault tolerant control.
Rights and permissions
About this article

Cite this article
Brahim, I.H., Bouattour, M., Mehdi, D. et al. Sensor Faults Observer Design with H∞ Performance for Non-linear T-S systems. Int. J. Autom. Comput. 10, 563–570 (2013). https://doi.org/10.1007/s11633-013-0754-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-013-0754-5