
Abstract
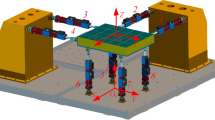
We report an adaptive feedforward controller to address the ill-conditioned dynamic hysteresis on a custom-developed magnetostrictive vibration shaker. The vibration shaker works within low-frequency bandwidth. Magnetostrictive-induced hysteresis is a main issue that affects excitation waveform replication. Generally, the shape of dynamic hysteresis loop depends on the amplitude and frequency of input current. Many studies, e.g., Prandtl–Ishlinskii (PI)-based feedforward control approach, are conducted to address nonlinear dynamics in the hysteresis. Particularly, the dynamic hysteresis loop characterizes non-positive gradient (i.e., ill condition) when the frequency of input current is increasing. Under the ill condition, traditional PI-based feedforward control is ineffective. In this paper, we investigate this phenomenon according to a few experiments. Then, a novel static hysteresis and dynamics hybrid compensator is presented to deal with the ill-conditioned dynamic hysteresis issue. The dynamic compensator is a finite-impulse-response-based model whose coefficients are updated by the modified filtered-x normalized least mean square (MFxNLMS) algorithm. The static hysteresis compensator is constructed with the polynomial-modified PI (PMPI) model. The parameters of PMPI model are acquired by particle swarm optimization. Two simulations are conducted to show (1) the convergence of the MFxNLMS algorithm; (2) the efficacy of proposed model to describe the ill-conditioned dynamic hysteresis. Furthermore, the experimental device is constructed and a couple of experiments are implemented. The experimental results show that, with the proposed controller, the magnetostrictive vibration shaker can replicate both narrowband and wideband waveforms accurately. Moreover, it is robust to load variation.



















Similar content being viewed by others

References
Chen, T.H., Liaw, C.M.: Vibration acceleration control of an inverter-fed electrodynamic shaker. IEEE/ASME Trans. Mech. 4(1), 60 (1999)
Hu, Q.: Robust adaptive sliding mode attitude maneuvering and vibration damping of three-axis-stabilized flexible spacecraft with actuator saturation limits. Nonlinear Dyn. 55(4), 301 (2009)
Noormohammadi, : Hybrid control of human-induced vibration. IEEE Trans. Serv. Comput. 7(2), 307 (2014)
Zhang, Y.W., Yuan, B., Fang, B., Chen, L.Q.: Reducing thermal shock-induced vibration of an axially moving beam via a nonlinear energy sink. Nonlinear Dyn. 87(2), 1159 (2017)
Sabatini, M., Gasbarri, P., Monti, R., Palmerini, G.B.: Vibration control of a flexible space manipulator during on orbit operations. Acta Astronaut. 73, 109 (2012)
Jiang, J., Li, D.: Optimal placement and decentralized robust vibration control for spacecraft smart solar panel structures. Smart Mater. Struct. 19(8), 085020 (2010)
Kamesh, D., Pandiyan, R., Ghosal, A.: Passive vibration isolation of reaction wheel disturbances using a low frequency flexible space platform. J. Sound Vib. 331(6), 1310 (2012)
Yang, K., Zhang, Y.W., Ding, H., Yang, T.Z., Li, Y., Chen, L.Q.: Nonlinear energy sink for whole-spacecraft vibration reduction. J. Vib. Acoust. 139(2), 021011 (2017)
Jung, H.J., Kim, I.H., Min, D.Y., Sim, S.H., Koo, J.H.: “A hybrid electromagnetic energy harvesting device for low frequency vibration.” Active and Passive Smart Structures and Integrated Systems 2013. vol. 8688, International Society for Optics and Photonics (2013)
Zhang, T., Jiang, C., Zhang, H., Xu, H.: Giant magnetostrictive actuators for active vibration control. Smart Mater Struct 13(3), 473 (2004)
Gao, X., Liu, Y.: Research of giant magnetostrictive actuator’s nonlinear dynamic behaviours. Nonlinear Dyn 92, 793–802 (2018)
Niu, M., Yang, B., Yang, Y., Meng, G.: Modeling and optimization of magnetostrictive actuator amplified by compliant mechanism. Smart Mater. Struct. 26(9), 095029 (2017)
Meng, A., Yang, J., Li, M., Jiang, S.: Research on hysteresis compensation control of gmm. Nonlinear Dyn. 83(1), 161 (2016)
Li, C.X., Gu, G.Y., Yang, M.J., Zhu, L.M.: High-speed tracking of a nanopositioning stage using modified repetitive control. IEEE Trans. Autom. Sci. Eng. 14(3), 1467 (2017)
Wang, F., Liu, Z., Zhang, Y., Chen, C.L.P.: Adaptive robust image-based visual servoing control of robot with unknown actuator hysteresis. Nonlinear Dyn. 85(1), 547 (2016)
Hedegärd, M.N., Wik, T., Wallin, C.: Adaptive hysteresis compensation using reduced memory sequences. IEEE/ASME Trans. Mech. 22(5), 2296 (2017)
Dapino, M., Smith, R., Faidley, L., Flatau, A.: Coupled structural-magnetic strain and stress model for magnetostrictive transducers. J. Intell. Mater. Syst. Struct. 11(2), 135 (2000)
Vaiana, N., Sessa, S.: A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 93, 1647–1669 (2018)
Tan, X., Baras, J.: Modeling and control of hysteresis in magentostrictive actuators. Automatica 40, 1469 (2004)
Rakotondrabe, M.: Multivariable classical prandtl-ishlinskii hysteresis modeling and compensation and sensorless control of a nonlinear 2-dof piezoactuator. Nonlinear Dyn. 89(1), 481 (2017)
Li, Z., Shan, J., Gabbert, U.: Inverse compensation of hysteresis using Krasnoselskii–Pokrovskii model. IEEE/ASME Transa. Mech. 23(2), 966–971 (2018)
Gu, G.Y., Zhu, L.M., Su, C.Y., Ding, H., Fatikow, S.: Modeling and control of piezo-actuated nanopositioning stages: a survey. IEEE Trans. Autom. Sci. Eng. 13(1), 313 (2016)
Kuhnen, K.: Modeling, identification and compensation of complex hysteretic nonlinearities: a modified Prandtl–Ishlinskii approach. Eur. J. Control 9(4), 407 (2003)
Qin, Y., Tian, Y., Zhang, D., Shirinzadeh, B., Fatikow, S.: A novel direct inverse modeling approach for hysteresis compensation of piezoelectric actuator in feedforward applications. IEEE/ASME Trans. Mech. 18(3), 981 (2013)
Al Janaideh, M., Aljanaideh, O.: Further results on open-loop compensation of rate-dependent hysteresis in a magnetostrictive actuator with the Prandtl-Ishlinskii model. Mech. Syst. Signal Process. 104, 835–850 (2018)
Qi, C., Gao, F., Li, H.X., Li, S., Zhao, X., Dong, Y.: An incremental hammerstein-like modeling approach for the decoupled creep, vibration and hysteresis dynamics of piezoelectric actuator. Nonlinear Dyn. 82(4), 2097 (2015)
Tan, U.X., Win, T., Shee, C.Y., Ang, W.T.: Rate-dependent hysteresis model of piezoelectric using singularity free Prandtl–Ishlinskii model. In: International Symposium on Computational Intelligence in Robotics and Automation. CIRA 2007, pp. 356–361. IEEE, New York (2007)
Tan, U.X., Latt, W.T., Shee, C.Y., Riviere, C.N., Ang, W.T.: Feedforward controller of ill-conditioned hysteresis using singularity-free prandtl-ishlinskii model. IEEE/ASME Trans. Mech. 14(5), 598 (2009)
Jiang, Y., Zhu, Y., Yang, K., Hu, C., Yu, D.: A data-driven iterative decoupling feedforward control strategy with application to an ultraprecision motion stage. IEEE Trans. Ind. Electron. 62(1), 620 (2015)
Sarban, R., Jones, R., Mace, B., Rustighi, E.: A tubular dielectric elastomer actuator: fabrication, characterization and active vibration isolation. Mech. Syst. Signal Process. 25(8), 2879 (2011)
Yang, Y., Yang, B., Niu, M.: Adaptive trajectory tracking of magnetostrictive actuator based on preliminary hysteresis compensation and further adaptive filter controller. Nonlinear Dyn. 92(3), 1109 (2018)
Liu, J., Zou, Q.: A decomposition-based learning approach to hysteresis-dynamics system control: Piezoelectric actuator example. In: American Control Conference (ACC), pp. 2649–2654. IEEE, New York (2015)
Liu, J., Zou, Q.: An almost superposition of hammerstein systems for simultaneous hysteresis-dynamics compensation. In: American Control Conference (ACC), pp. 679–684. IEEE, New York (2016)
De Oliveira, L.P., Stallaert, B., Janssens, K., Van der Auweraer, H., Sas, P., Desmet, W.: Nex-lms: a novel adaptive control scheme for harmonic sound quality control. Mech. Syst. Signal Process. 24(6), 1727 (2010)
Widrow, B., Stearns, S.: Adaptive Signal Processing. Prentice-Hall, New York (1985)
Widrow, B., Walach, E.: Adaptive Inverse Control, Reissue Edition: A Signal Processing Approach. IEEE Press Series on Power Engineering Adaptive Inverse Control. Wiley, New York (2008)
Hassibi, B.: On the robustness of LMS filters. Least-Mean-Sq. Adapt. Filters 4, 105–144 (2003)
Bolzern, P., Colaneri, P., De Nicolao, G.: Robustness and performance in adaptive filtering. In: Robustness in Identification and Control, pp. 174–189 (1999)
Poli, R., Kennedy, J., Blackwell, T.: Particle swarm optimization. Swarm Intell 1(1), 33 (2007)
Kachitvichyanukul, V.: Comparison of three evolutionary algorithms: Ga, pso, and de. Ind. Eng. Manag. Syst. 11(3), 215 (2012)
Chu, Z., Ma, Y., Cui, J.: Adaptive reactionless control strategy via the pso-elm algorithm for free-floating space robots during manipulation of unknown objects. Nonlinear Dyn. 91(2), 1321 (2018)
Bao, C., Sas, P., Van Brussel, H.: A novel filtered x-algorithm for active noise control. J. A 34(1), 89 (1993)
Acknowledgements
The work is supported by NSFC Fund (5177349), the National Key R&D Program of China (2017YFF0108000) and SJTU-CASC Advanced Space Technology Fund (USCAST2015-05, USCAST2016-13), for which the authors are most grateful.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that we have no conflict of interest and comply with ethical standards.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yi, S., Yang, B. & Meng, G. Ill-conditioned dynamic hysteresis compensation for a low-frequency magnetostrictive vibration shaker. Nonlinear Dyn 96, 535–551 (2019). https://doi.org/10.1007/s11071-019-04804-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-04804-1