
Abstract
This paper presents a generalization of the description of the displacement-correlation peak in particle image velocimetry (PIV) to include the effects due to local velocity gradients at the scale of the interrogation domain. A general expression is derived that describes the amplitude, location and width of the displacement-correlation peak in the presence of local velocity gradients. Simplified expressions are obtained for the peak centroid and peak width for simple non-uniform motions. The results confirm that local gradients can be ignored provided that the variation of the displacement within the interrogation domain does not exceed the (mean) particle-image diameter. An additional bias occurs for a spatially accelerating or decelerating fluid, which implies an artificial "particle inertia" even when the particles can be considered as ideal tracers.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the interrogation analysis in particle image velocimetry (PIV) by means of a spatial correlation, it is generally assumed that the displacement field is uniform (Adrian 1988; Westerweel 1993, 1997; Olsen and Adrian 2001). However, PIV is applied to study the flow fields that are typically non-uniform, and therefore it has to be explained under what circumstances the displacement field can be considered to be uniform at the scale of the interrogation volume. In the preceding studies for the case of uniform displacement fields it was shown that the width of the displacement-correlation peak is proportional to the particle-image diameter d τ (Adrian 1988; Westerweel 2000b). In a simulation study it was shown that the velocity gradients can be ignored when the variation a of the local particle-image displacement is small with respect to d τ (Keane and Adrian 1992), i.e.,
where M is the image magnification, Δt is the exposure time delay, and Δu represents the local variation of the velocity field, i.e.,
where L is a typical dimension of the interrogation volume, e.g., the thickness of the light sheet Δz 0 or the equivalent in-plane dimension of the interrogation region D I/M. The effect on the appearance of the correlation as a function of an increasing variation a of the displacement within the interrogation volume is shown in Fig. 1. In many practical situations the ratio d τ/D I is very small, and typically should not exceed 3–5% in order to preserve a well-defined correlation peak (Keane and Adrian 1992). This means that the local gradients have to be small in order to comply with this requirement. For increasing gradients the correlation peak amplitude decreases, while the width of the correlation peak increases in proportion to the variation of the displacement. Such a broadening of the displacement-correlation peak also occurs in micro-PIV as the result of Brownian motion of the tracer particles (Olsen and Adrian 2000a), which can be used to estimate the local temperature-dependent viscosity (Hohreiter et al. 2002).

For uniform displacements the correlation peak detectability is proportional to N I F I F O, where N I is the image density and F I and F O are the in-plane and out-of-plane loss-of-correlation due to in-plane and out-of-plane motion of the tracer particles (Keane and Adrian 1990). This can be generalized to: N I F I F O F Δ, where the term F Δ accounts for the loss-of-correlation due to the local variation of the displacement field (Westerweel 2004; Hain and Kähler 2007).
The reduction of the displacement-correlation peak means that the peak detectability is reduced. This implies a higher occurrence of spurious vectors in regions with strong local gradients (Keane and Adrian 1992). If the gradient only occurs in the in-plane components of the displacement, then it is possible to (partially) compensate for the effects of the gradients in the displacement by means of local image deformation (Huang et al. 1993; Tokumaru and Dimotakis 1995; Fincham and Delerce 2000; Scarano 2002). However, in most turbulent flows the small-scale turbulence is (nearly) isotropic, which means that the in-plane variation of the displacements are of the same magnitude as the out-of-plane variation of the displacements when the light-sheet thickness is of the order of the in-plane dimension of the interrogation domain; then the out-of-plane gradients cannot be compensated by planar deformation methods, which means that the local velocity gradients irreversibly deteriorate the interrogation performance. In multi-frame PIV local velocity gradients can easily dominate the peak detectability when the temporal separation of the interrogation images is increased (Hain and Kähler 2007). For micro-PIV the depth-of-correlation (Olsen and Adrian 2000b) can be of the order of the flow domain (i.e., channel depth), which means that a large range of displacements can occur in a single interrogation domain. As mentioned before, Brownian motion of the tracer particles adds to the broadening of the correlation peak.
In this paper, the mathematical support for the empirical relation in Eq. (1) is derived. First the theoretical analysis for PIV interrogation in case of a uniform displacement field is summarized (Sect. 2). Then an expression for the local displacement distribution is derived (Sect. 3). This is used to generalize the existing theory for uniform displacements to include non-uniform displacement fields (Sect. 4). The analysis follows a more rigorous approach than used by Olsen and Adrian (2001). Based on the extended description several effects are described where local gradients affect the interrogation analysis. The last section (Sect. 5) summarizes the main results.
2 Interrogation by spatial cross-correlation
The point of departure for the analysis is the original theoretical description of the interrogation analysis given by Adrian (1988), Keane and Adrian (1990), Westerweel (1993), and Olsen and Adrian (2001), which is summarized here.
Consider two image fields I 1 and I 2, which represent the two image frames recorded with a time delay Δt = t 2 − t 1 (Olsen and Adrian 2001):
where W 1 and W 2 are the weighting functions that define the interrogation windows, I 01 and I 02 define the illumination pulses, τ0 is the particle-image intensity per unit illumination, M the image magnification, Footnote 1 X and x are the coordinates in the image domain and flow field domain, respectively, and
describes the pattern of tracer particles at positions x i (t) at time t. It is common to split g into mean and fluctuating parts, i.e., g = 〈g〉 + g′, with 〈g〉 = C and 〈g′〉 = 0, where C is the mean number density of tracer particles (Adrian 1988).
The spatial cross-correlation R(s) for continuous image fields is defined by
For discrete image fields, i.e., digital PIV images, the spatial correlation is also defined at discrete separations. This is given by convoluting R(s) with the self-correlation of the spatial pixel sensitivity and sampling the result at discrete separations, as described by Westerweel (1993, 1997). For sufficiently large particle images, i.e., d τ/d r ≪1 (where d r is the pixel size), R(s) closely approximates the spatial correlation for digital PIV images (Westerweel 2000a, b).
It is common to split the image fields into mean and fluctuating parts. Then R(s) can be written as (Keane and Adrian 1992)
where R C is the correlation of the mean image intensities, R F the correlation of the mean image intensity of I 1 with the fluctuating part of I 2 and vice versa, Footnote 2 and R D the correlation of the fluctuating parts of I 1 and I 2. The terms R C and R F vanish when the mean image intensity is subtracted from I 1 and I 2. The remaining term R D can be split into mean and fluctuating parts, where the averaging is taken over an ensemble of tracer patterns for a given (fixed) velocity field u(X,t) (Adrian 1988; Westerweel 1993):
where 〈R D (s)|u〉 is commonly referred to as the displacement-correlation peak and R′D(s) as the random correlation term (Westerweel 2000b).
At this point it is common to make a number of general assumptions: (1) that all particle images have an identical shape and size; Footnote 3 (2) that the light sheet intensity distribution is only a function of the out-of-plane coordinate Footnote 4 (here denoted as z); (3) that the optical axis is normal to the light-sheet plane; and (4) that the two exposures of the light sheet occur in the same plane. The ensemble mean of the spatial correlation can then be written as (Adrian 1988; Westerweel 1993):
where 〈g′1(x′)g′2(x′′)|u〉 is the conditional two-point ensemble cross-correlation over all possible tracer pattern fluctuations for a given flow field u. For a uniform displacement this can be expressed as (Adrian 1988)
with: Δx = uΔt. Under the condition that the particle-image diameter is small with respect to the typical dimension of the interrogation region (d τ ≪ D I ) and for a uniform particle-image displacement s D (=MΔx), Footnote 5 the displacement-correlation peak can be expressed as (Adrian 1988)
with:
with τ 200 = ∫τ0(X)2 dX and I zk = ∫I 0k (z) dz for k = 1,2. The image density N I represents the mean number of particle images in the interrogation domain, the terms F I and F O are denoted as the in-plane and out-of-plane loss of correlation, respectively, and F τ represents the particle-image self-correlation. Under the assumptions stated above, the displacement-correlation peak is a single sharp peak located at s D . The exact position of the peak can be determined from either the peak centroid or peak maximum. For symmetric particle images and a uniform displacement the peak centroid and peak maximum are identical in the limit d τ/D I →0.
The centroid \({\varvec{\mu}}_D\) of the ensemble mean of the displacement-correlation peak is defined as (Adrian 1988; Keane and Adrian 1990)
Substitution of Eq. (10) in Eq. (15) yields
The function F τ(s) is symmetric with its centroid located at s D . The in-plane loss-of-correlation F I(s) skews F τ(s − s D ), which leads to a bias error in the measured displacement (Keane and Adrian 1990; Westerweel 1997). The bias error is directed toward smaller displacements, which is related to the fact that particle images with larger displacements are more likely to leave the interrogation domain between the two light pulses.
In general the width of F τ(s) is much smaller than the width of F I(s), i.e., d τ ≪ D I. Hence, F I(s) can be written as a Taylor series around s D :
Substitution in Eq. (16) yields
where the term between brackets is the second moment of F τ(s). Given that F I(s) and the second moment of F τ(s) are both positive, and that ∂F I/∂s is directed toward the origin, \({\varvec{\mu}}_D\) is usually biased toward s = 0 (Keane and Adrian 1990; Westerweel 1997).
For identical square uniform interrogation windows, the in-plane loss-of-correlation is given by Westerweel (1997):
To reduce the complexity of the analysis, only one component of s is considered. The spatial derivative of F I with respect to s is then given by
with s D = (s D ,t D ). (A similar expression can be found for the direction perpendicular to the direction of s). The second moment of F τ(s) for identical Gaussian particle images is \(\frac{1}{8} d_{\tau}^2,\) so that the expression for the expected correlation peak centroid defined in Eq. (18) becomes:
As the second order and higher order derivatives for F I defined in Eq. (19) in are zero, this expression is exact. Indeed, the centroid is biased toward s = 0. For uniform interrogation regions the displacement bias error is practically constant over a considerable range in s D (Westerweel 1997).
In general the bias error will be small, i.e., typically about 0.06 px for particle images with a diameter of 2 px in a 32 × 32-pixel interrogation domain (Westerweel 1997). This is small with respect to the random error (typically 0.1 pixel units) in instantaneous data, but can be significant when evaluating flow statistics, such as the mean flow velocity. The bias error can be eliminated in several ways. It is evident that the bias error vanishes when the gradient of F I is zero. For uniform interrogation windows this can be accomplished either by using two interrogation windows of different size (Keane and Adrian 1992), or by using offset interrogation regions (Westerweel et al. 1997), so that the displacement-correlation peak is located at the maximum of F I(s) (i.e., ∂F I/∂s = 0). Another approach is to divide the correlation values by F I(s) (Westerweel 1997).
3 The distribution function of a displacement field
In this section it is explained how the displacement distribution is obtained for a given displacement field over a finite measurement volume. The evaluation of the images by a spatial cross-correlation implies that 〈g′1 g′2|u〉 is evaluated over a finite measurement volume, i.e., δV(x′) = Δz 0 · (D I/M)2, which is depicted in Fig. 2. This volume is equivalent to the weight function W(x) defined by Olsen and Adrian (2001). Due to the spatial variations in the displacement over δV(x′), the single displacement value that is represented by the δ-function in Eq. (9) is replaced by a displacement distribution function F Δ(s), which eliminates the explicit dependence on x′ and leads to the following expression for the displacement-correlation peak:
where * represents a convolution integral. Hence, the displacement s D is no longer uniquely defined: it may now refer to the maximum of F Δ(s) (viz., the most probable displacement), or the first moment of the distribution (viz., the local mean displacement), or any other convenient parameter that characterizes F Δ(s).

The integration of 〈g′1 g′2|u〉 over a small volume δV(x′) is replaced by a displacement distribution F Δ(s). (The axes for x′ and x′′ − x′ actually represent three-dimensional spaces.) Adapted from Westerweel (1997)
The displacement distribution for a displacement field Δx(x) over a finite measurement volume δV is given by
This integral can be easily evaluated in the Fourier transform domain, i.e.
where the following identity was applied:
Note that: \({{\mathcal{F}}}\left\{F_{\Updelta}({\user2{s}})\right\}\equiv 1,\) for k = 0, i.e.: \(\int F_{\Updelta}({\user2{s}}) {\rm d}{\user2{s}} \equiv 1,\) so that F Δ(s) is indeed a distribution function for arbitrary Δx(x).
To illustrate the effect of a local variation of the displacement field, two example displacement fields are considered: a simple shear and a sinusoidal displacement field. First, consider a simple shear in one direction, i.e.,
for −L ≤ y ≤ L, where a is a constant. Consider only the x-coordinate, which implies a reduction to a one-dimensional problem. Substitution of Eq. (26) in Eq. (24) yields
The inverse Fourier transform of a sinc-function is a rect-function
so that the inverse Fourier transform of Eq. (27) yields
Note that the total area of the rect-function is unity. This implies that an increase of the shear also increases the width of the distribution, but decreases the amplitude. Hence, the local variations of the displacement reduce the correlation peak amplitude and increase the width of the correlation peak, in correspondence to what occurs in Fig. 1 for increasing a. Consequently, the local variations of the displacement field also reduce the peak detectability, and enhance the displacement bias error.
Now, consider a sinusoidal displacement field, again in one direction only, i.e.,
over the domain − L ≤ x ≤ L. The corresponding Fourier transform of the displacement distribution is equal to a zeroth order Bessel function of the first kind, i.e.,
The corresponding inverse Fourier transform of Eq. (31) is
(see also Fig. 3). In spite of the strong similarity between the Fourier transform of F Δ(s) for the sinusoidal field with that of the shear field (see Fig. 3, middle), the corresponding displacement distributions are quite different: the distribution for the sinusoidal field has two peaks. This means that the displacement-correlation peak will have two maxima (provided that the local variations of the displacement field are larger than the equivalent width of the particle images; see discussion below). This is an example of the so-called peak splitting, which occurs often in regions with very strong local fluctuations of the displacement. This means that for a finite number of particle images the interrogation analysis will only detect one of the two peaks; in this case the measured displacement can not be considered as a local mean value of the displacement field.

The displacement field (left), and the corresponding distribution Fourier transform (middle) and displacement distribution (right), for a simple shear (top row) and sinusoidal displacement field (bottom row)
4 The displacement-correlation peak for non-uniform displacements
The analysis in the preceding section did not include the effects due to the finite window size and the finite dimensions of the particle images. Our point of departure is the exact expression in Eq. (8). For ideal tracer particles the two-point correlation of the tracer-pattern fluctuations for a non-uniform displacement field is given by, cf. Eq. (9)
In the case of a uniform displacement field, 〈g′1(x′)g′2(x′′)|u〉 is a function of s = x′′ − x′ only, which leads to a rather simple expression that was derived in Sect. 2. However, for a non-unform displacement field Eq. (33) is a function of x′, which makes it difficult to carry out a straightforward evaluation of Eq. (8). The expression in Eq. (8) can be solved numerically, but this is a rather cumbersome procedure for a generalized analysis of spatial gradients. Instead, it is possible to reduce Eq. (8) to that of a much simpler approximate equation, by making some general assumptions. This procedure is described in this section.
4.1 Approximate expression
To simplify the expression in Eq. (8), it is assumed that the displacement field is uniform, except in the direction of the x-coordinate, i.e.,
It is assumed that the displacement field is a function of x and y only, so that the double integral over z′ and z′′ can be replaced by
In order to preserve the skewing effect of the in-plane loss-of-pairs on the displacement-correlation peak, a term containing F I (s) is split from the integrand:
In addition, the particle-image self-correlation is accounted for by a convolution of the integrand with F τ(s)
The substitution of Eqs. (35)–(37) in Eq. (8) yields
with: ΔX = MΔx. This expression is then further reduced by the integration of the two δ-functions that replace the τ0-functions, i.e.
Given that the variations of the displacement field are small, i.e.,
with |a| = M|Δu|Δt ≪ D I, F I(s′) is replaced by F I(s D ), so that F I(s D )D 2 I represents the normalization constant for the displacement distribution function. Hence, the approximation for Eq. (8) reads
with
Note that the integral in Eq. (41) represents a convolution of F τ(s) and F Δ(s); this justifies the expression given in Eq. (22).
Evidently, the result in Eqs. (41–42) needs to be validated against the numerical solutions of the exact expression in Eq. (8). This is done in the next section.
4.2 Simple flows
In this section the effect of spatial gradients in the displacement field on the location, height and shape of the displacement-correlation peak is investigated for the case of simple, one-dimensional displacement fields, such as simple shear and uniaxial strain. To reduce the complexity of the analysis, only uniform interrogation windows are considered. Analytical expressions for the peak centroid and the peak width are found by means of the approximate expression Eq. (41) that was derived in the preceding section. These are compared against numerical solutions of the exact expression Eq. (8).
4.2.1 Simple shear
Consider a uniform displacement ΔX 0 plus a simple shear motion
The displacement field is a function of Y only, so that F Δ(s), defined in Eq. (42), is given by
with s = (s,t)T. This integral was solved in Sect. 3 for a uniform simple shear and a uniform interrogation window. Hence, the corresponding displacement distribution F Δ(s,t) is uniform in s:
The substitution of Eq. (45) in Eq. (41) yields the displacement-correlation peak that is shown in Fig. 4 for different values of the gradient parameter a. In the Gaussian approximation for F τ(s) and F Δ(s), the width d D of F τ *F Δ (s) is given by
Hence, the local shear motion increases the width of the displacement-correlation peak. This increases the displacement bias error of the peak centroid in comparison to the uniform displacement result Eq. (21)
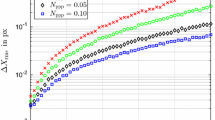
In Fig. 5 the displacement bias error is plotted as a function of the gradient parameter for different particle-image diameters. The solid lines represent Eq. (47), whereas the symbols are numerical solutions of the exact equation in Eq. (8). Note that the increase of the bias magnitude due to the shear is equal for all values of d τ. This is reflected in Fig. 6, in which the width of the displacement-correlation peak relative to its width for uniform displacements (i.e., \(\sqrt{2}d_{\tau}\)) is plotted as a function of the gradient relative to the particle-image diameter. The solid line represents Eq. (46), whereas the symbols represent numerical solutions of Eq. (8). This graph indicates that PIV images with large d τ are less sensitive to variations in the displacement than those images with small d τ. So, according to Eq. (18) the displacement bias error is determined by the width d D of the displacement-correlation peak, given by Eq. (47). This is shown in Fig. 7, in which the displacement bias error is plotted as a function of d D .

The displacement-correlation peak for the case of simple shear for different values of the gradient parameter a (=MΔuΔt) relative to the particle-image diameter d τ, with a mean displacement of ΔX 0 = 0.25D I and a particle-image diameter d τ = 0.05D I. The curve represents the displacement-correlation peak for a uniform displacement that is equal to the mean displacement of the shear motion

The displacement bias ɛ (=μ D − s D ) relative to D I as a function of the local variation of the displacement MΔuΔt for a uniform simple shear plus a uniform translation of ΔX 0 = 0.25D I, for different values of d τ/D I

The width d D of 〈R D |u〉 relative to the particle-image diameter d τ as a function of the local variation of the displacement MΔuΔt relative to d τ

4.2.2 Uniaxial strain
Consider the displacement field for uniaxial strain
with \(\frac{1}{2} |a| \leq \Updelta X_0,\) so that ΔX ≥ 0 for all positions inside the interrogation window. Substitution of Eq. (48) in Eq. (42) yields
(Note that W 1 and W 2 now represent one-dimensional functions.) The integrand only makes a contribution to the total integral when s = ΔX(X) on the interval where W 1(X)W 2(X + s) ≠ 0. This implies that the finite dimensions of the interrogation windows limit the range of displacements that can be measured.
As for the case of a simple shear, the displacement distribution of the tracer particles within W 1 is uniform with a mean displacement ΔX 0 and a width M|Δu|Δt. However, for Δx > 0 the integral in Eq. (49) is non-zero only for
Substitution of Eq. (48) yields that F Δ(s) ≠ 0 for \(|s-s_{\Updelta}| < \frac{1}{2} d_{\Updelta},\) with (see also Fig. 8)
and:
Hence, for the case of a positive uniaxial strain (a = MΔu Δt > 0), i.e., a spatially accelerating fluid, Eq. (49) implies that the local displacement-distribution is truncated at the side of the largest displacements. Consequently, the mean of the observed local displacement-distribution is then biased toward a smaller displacement in comparison with the actual mean of the local displacement distribution. On the other hand, for a negative uniaxial strain (a = MΔu Δt < 0), i.e., a spatially decelerating fluid, the distribution is truncated at the side of smallest displacements, so that the mean measured displacement is larger than the local mean displacement. This bias adds to the displacement bias error that is the result of the skew of the displacement-correlation peak due to F I (Fig. 9).

The displacement distribution for uniaxial strain. For positive strain (a) the distribution is truncated at the largest displacements, whereas for negative strain (b) the distribution is truncated at the smallest displacements

The first moment of the displacement distribution for a uniaxial strain as a function of the local mean displacement ΔX 0, for different values of the gradient parameter a = MΔuΔt
So, for an accelerating fluid (a > 0) the measured displacement is smaller than the true local mean displacement, whereas for a decelerating fluid (a < 0) the measured displacement is larger. It is as if the tracer particles have some inertia, even if the tracer particles themselves are ideal.
The effect of the uniaxial strain on the centroid of the displacement-correlation peak is found by the substitution of F Δ(s) in Eq. (22). In Fig. 10 are shown the displacement-correlation peaks for uniaxial strain with different values of a. Note that the displacement-correlation peak for uniaxial strain has a larger bias than for simple shear (for the same value of a), which is the result of the truncation of the displacement distribution for large displacements.

To estimate the displacement bias error, it is assumed that the width d D of the displacement-correlation peak for a uniaxial normal stress is given by (Gaussian approximation):
In Fig. 12 the approximate result in Eq. (53) is compared against the numerical solutions of the equation in Eq. (22).
The total displacement bias error is now given by the displacement bias error for the truncated displacement distribution plus the bias error due to the increase of the width of the displacement-correlation peak, i.e.:
The total displacement bias error for uniaxial strain is plotted in Fig. 11. It is noted that the use of offset interrogation windows, which implies ΔX 0 = 0, only compensates for part of the bias and increase in peak width (Fig. 12).


5 Discussion and conclusion
The previous sections describe the effect of local gradients at the scale of the interrogation domain on the shape of the displacement-correlation peak. This is a generalization of the existing theoretical expression for the displacement-correlation peak. An approximate expression is derived, which accurately predicts the bias error and peak width for simple flows. It is confirmed that the broadening and splitting of the displacement-correlation peak due to local variations of the displacement does not occur as long as the variation a of the displacements over the interrogation volume does not exceed the particle image diameter d τ, as stated in Eq. (1).
The procedure to determine the displacement-correlation peak for non-uniform displacement fields would be as follows:
-
1.
determine the local distribution function F Δ(s) of the displacement field;
-
2.
convolve F Δ(s) with the particle-image self-correlation F τ(s);
-
3.
multiply the result with the in-plane loss-of-pairs F I(s) and out-of-plane loss-of-pairs F O(Δz).
In most situations with small values of a the local displacement field is well approximated by a uniform displacement plus a shear and/or uniaxial strain. Specific results for these fluid motions are obtained in Sects. 4.2.1 and 4.2.2.
The principal effect of sub-interrogation gradients is a reduction of the peak amplitude, a bias error in the estimated displacement, and a proportional broadening of the correlation peak, where the total volume of the correlation peak is conserved. The analysis predicts the bias error and correlation peak width, which can be related to peak detectability (peak height) and random error (peak width). For a simple shear the width d D of the correlation peak is given by Eq. (46). The conservation of total volume then implies that the correlation peak amplitude is given by
This expression predicts mean peak amplitudes of: 1.00, 0.85, 0.51 and 0.22, for: a/d τ = 0.0, 0.5, 1.0 and 1.5, respectively; these values correspond well with the (instantaneous) peak amplitudes shown in Fig. 1 (see also Hain and Kähler 2007). The one-quarter rules for the in-plane and out-of-plane displacement imply a maximum loss-of-correlation that reduces the correlation peak height to 75% of the maximum amplitude. A similar drop in amplitude corresponds to |a|/ d τ < 0.66, i.e., a two-third rule for the displacement variation.
The random error σΔX is proportional to the width d D of the displacement-correlation peak, and for a simple shear it is approximately given by Footnote 6
with c = 0.05-7 (Westerweel 2000b).
In the case of a uniaxial strain, i.e., a spatially accelerating or decelerating fluid, the centroid of the displacement-correlation peak yields an additional bias that can be interpreted as an artificial ‘inertia’ of the particles. This even occurs when the particles can be considered as ideal tracers, and is the result of the finite dimensions of the interrogation domain.
Also, the analysis shows that a simple sinusoidal fluid motion with a wavelength equal or less than the dimension of the interrogation domain leads to the appearance of two correlation peaks (see Fig. 3) when the displacement amplitude becomes larger than d τ. This is an example of the so-called peak splitting. In a practical situation, i.e., with a finite number of particle images, it is likely that the interrogation analysis just finds only one of the two peaks (ignoring the other peak as a possible random-correlation peak). Then the measured displacement would correspond to the local minimum or maximum displacement. Footnote 7 This means that the measured displacement for the case of a sinusoidal displacement field is not proportional to the locally averaged displacement; this invalidates the commonly accepted assumption that the measured displacement is equal to the locally averaged displacement (Willert and Gharib 1991; Olsen and Adrian 2001; Hart 2000; Nogueira et al. 1999).
An application where the local gradients can become dominant is micro-PIV, in particular for measurements where the interrogation domain extends over a substantial part along the observation direction. For pressure-driven Stokes flow in a channel geometry the velocity profile along the optical axis has a parabolic shape. This shape is approximated by the sinusoidal distribution in Fig. 3 for: 0 ≤ x ≤ 1; hence, F Δ(s) is approximately given by Eq. (32) for s ≥ 0. This particular shape of the displacement-correlation peak is reported by Wereley and Whitacre (2006). In this particular situation the PIV measurement yields the maximum velocity in the measurement domain, rather than the mean displacement.
In order to absorb larger local variations of the displacement, one could increase the particle-image diameter d τ. In the case of diffraction-limited particle images, d τ ≈d s , with d s = 2.44(M + 1)f #λ, where f # is the aperture number of the lens and λ the light wavelength. So, d τ can be increased by increasing f #, i.e., by reducing the lens aperture. Unfortunately, this also reduces the collected amount of light scattered by the tracer particles, and—in the case of micro-PIV—implies an unfavorable increase of the correlation depth (Olsen and Adrian 2000b). An increase of d τ also implies a proportional increase of the random error, given in Eq. (56), and a general deterioration of the overall performance of the PIV system (Adrian 1997). One could possibly determine an optimum between increasing d τ to improve peak detectability, while accepting a (small) increase in the random error. The expressions given in this paper can be used as a guideline.
Notes
Note that M is only a scalar in the case of paraxial imaging and a thin light sheet; in general M will be a projection matrix that maps x onto X; see, e.g., Prasad (2000).
In older texts the term R F is mistakenly referred to as the random correlation term, but this part of the signal is actually included in R D ; (see Westerweel 2000b).
This assumption is generally satisfied for diffraction-limited imaging of small tracer particles; see Adrian (1984). These particle images can have different intensities based on their position within the light sheet.
This condition is generally satisfied at the local scale of the equivalent interrogation volume in the flow.
Note that M is a projection of the volumetric flow domain onto the planar image domain.
Provided that the particle image diameter is at least two pixel units in a digital PIV image.
As the result of the bias toward s = 0, it is more likely that the peak closest to the origin of the correlation domain is detected.
References
Adrian RJ (1984) Scattering particle characteristics and their effect on pulsed laser measurements of fluid flow: speckle velocimetry vs. particle image velocimetry. Appl Opt 23:1690–1691
Adrian RJ (1988) Statistical properties of particle image velocimetry measurements in turbulent flow. In: Adrian RJ et al (eds) Laser anemometry in fluid mechanics – III. Ladoan-Inst Super Tec, Lisbon, pp 115–129
Adrian RJ (1997) Dynamic ranges of velocity and spatial resolution of particle image velocimetry. Meas Sci Technol 8:1393–1398
Fincham A, Delerce G (2000) Advanced optimization of correlation imaging velocimetry algorithms. Exp Fluids 29:S13–S22
Hain R, Kähler CJ (2007) Fundamentals of multiframe particle image velocimetry (PIV). Exp Fluids 42:575–587
Hart DP (2000) PIV error correction. Exp Fluids 29:13–22
Hohreiter V, Wereley ST, Olsen MG, Chung JN (2002) Cross-correlation analysis for temperature measurement. Meas Sci Technol 13:1072–1078
Huang HT, Fiedler HE, Wang JJ (1993) Limitation and improvement of PIV. Part i: limitation of conventional techniques due to deformation of particle image patterns. Exp Fluids 15:168–174
Keane RD, Adrian RJ (1990) Optimization of particle image velocimeters. Part I: double pulsed systems. Meas Sci Technol 1:1202–1215
Keane RD, Adrian RJ (1992) Theory of cross-correlation analysis of PIV images. Appl Sci Res 49:191–215
Nogueira J, Lecuona A, Rodriguez PA (1999) Local field correction PIV: on the increase of accuracy of digital PIV systems. Exp Fluids 27:107–116
Olsen MG, Adrian RJ (2000a) Brownian motion and correlation in particle image velocimetry. Opt Laser Technol 32:621–627
Olsen MG, Adrian RJ (2000b) Out-of-focus effects on particle image visibility and correlation in microscopic particle image velocimetry. Exp Fluids 29:S166–S174
Olsen MG, Adrian RJ (2001) Measurement volume defined by peak-finding algorithms in cross-correlation particle image velocimetry. Meas Sci Technol 12:N14–N16
Prasad AK (2000) Stereoscopic particle image velocimetry. Exp Fluids 29:103–116
Scarano F (2002) Iterative image deformation methods in PIV. Meas Sci Technol 13:R1–R19
Tokumaru PT, Dimotakis PE (1995) Image correlation velocimetry. Exp Fluids 19:1–15
Wereley ST, Whitacre I (2006) Particle dynamics in a dielectrophoretic microdevice. In: Ferrari M, Bashir R, Wereley S (eds) BioMEMS and biomedical nanotechnology. Volume IV: biomolecular sensing, processing and analysis, chapter 13. Springer, Heidelberg, pp 259–276
Westerweel J (1993) Digital particle image velocimetry—theory and application. PhD thesis, Delft University of Technology
Westerweel J (1997) Fundamentals of digital particle image velocimetry. Meas Sci Technol 8:1379–1392
Westerweel J (2000a) Effect of sensor geometry on the performance of PIV interrogation. In: Adrian RJ, et al (eds) Laser techniques applied to fluid mechanics. Springer, Berlin, pp 37–55
Westerweel J (2000b) Theoretical analysis of the measurement precision in particle image velocimetry. Exp Fluids 29:S3–12
Westerweel J (2004) Principles of PIV technique III. Spatial correlation analysis. In: Application of particle image velocimetry—theory and practice. DLR, Göttingen
Westerweel J, Dabiri D, Gharib M (1997) The effect of a discrete window offset on the accuracy of cross-correlation analysis of digital PIV recordings. Exp Fluids 23:20–28
Willert CE, Gharib M (1991) Digital particle image velocimetry. Exp Fluids 10:181–193
Open Access
This article is distributed under the terms of the Creative Commons Attribution Noncommercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License (https://creativecommons.org/licenses/by-nc/2.0), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
Westerweel, J. On velocity gradients in PIV interrogation. Exp Fluids 44, 831–842 (2008). https://doi.org/10.1007/s00348-007-0439-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-007-0439-3