
Abstract
Purpose
The aim of this work was to develop and test a general methodology for the planning and performance of robot-assisted, MR-guided interventions. This methodology also includes the employment of software tools with appropriately tailored routines to effectively exploit the capabilities of MRI and address the relevant spatial limitations.
Methods
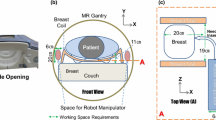
The described methodology consists of: (1) patient-customized feasibility study that focuses on the geometric limitations imposed by the gantry, the robotic hardware, and interventional tools, as well as the patient; (2) stereotactic preoperative planning for initial positioning of the manipulator and alignment of its end-effector with a selected target; and (3) real-time, intraoperative tool tracking and monitoring of the actual intervention execution. Testing was performed inside a standard 1.5T MRI scanner in which the MR-compatible manipulator is deployed to provide the required access.
Results
A volunteer imaging study demonstrates the application of the feasibility stage. A phantom study on needle targeting is also presented, demonstrating the applicability and effectiveness of the proposed preoperative and intraoperative stages of the methodology. For this purpose, a manually actuated, MR-compatible robotic manipulation system was used to accurately acquire a prescribed target through alternative approaching paths.
Conclusions
The methodology presented and experimentally examined allows the effective performance of MR-guided interventions. It is suitable for, but not restricted to, needle-targeting applications assisted by a robotic manipulation system, which can be deployed inside a cylindrical scanner to provide the required access to the patient facilitating real-time guidance and monitoring.




Similar content being viewed by others


References
Streitparth F, Gebauer B, Melcher I et al (2009) MR-guided laser ablation of osteoid osteoma in an open high-field system (1.0 T). Cardiovasc Intervent Radiol 32:320–325
Tsekos NV, Khanicheh A, Christoforou E, Mavroidis C (2007) Magnetic resonance-compatible robotic and mechatronics systems for image-guided interventions and rehabilitation: a review study. Ann Rev Biomed Eng 9:351–387
Keroglou C, Seimenis I, Tsekos NV et al. (2010) Consideration of geometric constraints regarding MR-compatible interventional robotic devices. In: Proceedings of 3rd IEEE/RAS-EMBS international conference on biomedical robotics and biomechatronics, Tokyo, Japan
Wonneberger U, Schnackenburg B, Streitparth F et al (2010) Evaluation of magnetic resonance imaging-compatible needles and interactive sequences for musculoskeletal interventions using an open high-field magnetic resonance imaging scanner. Cardiovasc Intervent Radiol 33:346–351
Fischbach F, Bunke J, Thormann M et al (2011) MR-guided freehand biopsy of liver lesions with fast continuous imaging using a 1.0-T open MRI scanner: experience in 50 Patients. Cardiovasc Intervent Radiol 34:188–192
Hushek SG, Martin AJ, Steckner M et al (2008) MR systems for MR-guided interventions. J Magn Reson Imaging 27:253–266
Moche M, Trampel R, Kahn T et al (2008) Navigation concepts for MR image-guided interventions. J Magn Reson Imaging 27:276–291
Melzer A, Gutmann B, Remmele T et al (2008) INNOMOTION for percutaneous image-guided interventions: principles and evaluation of this MR- and CT-compatible robotic system. IEEE Eng Med Biol Mag 27:66–73
Moche M, Zajonz D, Kahn T et al (2010) MRI-guided procedures in various regions of the body using a robotic assistance system in a closed-bore scanner: preliminary clinical experience and limitations. J Magn Reson Imaging 31:964–974
Hata N, Tokuda J, Hurwitz S, Morikawa S (2008) MRI-compatible manipulator with remote-center-of-motion control. J Magn Reson Imaging 27:1130–1138
Sutherland GR, Latour I, Greer AD (2008) Integrating an image-guided robot with intraoperative MRI: a review of the design and construction of neuroArm. IEEE Eng Med Biol Mag 27:59–65
Weiss CR, Nour SG, Lewin JS (2008) MR-guided biopsy: a review of current techniques and applications. J Magn Reson Imaging 27(2):311–325
Graves MJ, Wakely S, Bearcroft PW et al (2008) MR-guided direct arthrography of the hip. J Magn Reson Imaging 28:462–465
Arepally A (2008) Targeted drug delivery under MRI guidance. J Magn Reson Imaging 27:292–298
Keroglou C, Tsekos NV, Seimenis I et al. (2009) Design of MR-compatible robotic devices: magnetic and geometric compatibility aspects. In Proceedings of 9th international conference on information technology and applications in biomedicine, Larnaca, Cyprus
Kühn J-P, Langner S, Hegenscheid K et al (2010) Magnetic resonance-guided upper abdominal biopsies in a high-field wide-bore 3-T MRI system: feasibility, handling, and needle artefacts. Eur Radiol 20:2414–2421
Frahm C, Gehl H-B, Melchert UH et al (1996) Visualization of magnetic resonance-compatible needles at 1.5 and 0.2 Tesla. Cardiovasc Intervent Radiol 19:335–340
Jolesz FA, Nabavi A, Kikinis R (2001) Integration of interventional MRI with computer-assisted surgery. J Magn Reson Imaging 13:69–77
Gering DT, Nabavi A, Kikinis R et al (2001) An integrated visualization system for surgical planning and guidance using image fusion and an open MR. J Magn Reson Imaging 13:967–975
Fei B, Duerk JL, Boll DT et al (2003) Slice-to-volume registration and its potential application to interventional MRI-guided radio-frequency thermal ablation of prostate cancer. IEEE Trans Med Imaging 22:515–525
Tang AM, Kacher DF, Lam EY et al (2008) Simultaneous ultrasound and MRI system for breast biopsy: compatibility assessment and demonstration in a dual modality phantom. IEEE Trans Med Imaging 27:247–254
Wacker FK, Vogt S, Khamene A et al (2006) An augmented reality system for MR image-guided needle biopsy: initial results in a swine model. Radiology 238:497–504
Susil RC, Camphausen K, Choyke P et al (2004) System for prostate brachytherapy and biopsy in a standard 1.5 T MRI scanner. Magn Reson Med 52:683–687
Christoforou E, Akbudak E, Ozcan A et al (2007) Performance of interventions with manipulator-driven real-time MR-guidance: Implementation and initial in vitro tests. Magn Reson Imaging 25:69–77
Abolhassani N, Patel R, Moallem M (2007) Needle insertion into soft tissue: a survey. Med Eng Phys 29:413–431
Acknowledgments
This work was supported by the Cyprus Research Promotion Foundation and the European Regional Development Fund (grant TEXNOLOGIA/MHX/0308(BIE)/05). NVT acknowledges partial support by the National Science Foundation (NSF) award CNS-0932272.
Conflict of interest
The authors declare that they have no conflict of interest regarding the work presented in this article.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Seimenis, I., Tsekos, N.V., Keroglou, C. et al. An Approach for Preoperative Planning and Performance of MR-guided Interventions Demonstrated With a Manual Manipulator in a 1.5T MRI Scanner. Cardiovasc Intervent Radiol 35, 359–367 (2012). https://doi.org/10.1007/s00270-011-0147-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00270-011-0147-5