
Abstract
Movement interventions commonly feature Fundamental locomotor skills (FLSs) like hopping. These skills are thought to positively shape physical activity (PA) trajectory in children. However, the extent to which children who are at risk for overweight and obesity deploy these skills during leisure time PA is often unknown. Direct observation methods are cost-prohibitive. Step count from commercial activity trackers fail to capture these movements. This paper explored the feasibility of using an instrumented insole and machine learning algorithms to classify hopping, running, sprinting, and walking. A subject (age: 40 years; mass: 81 kg; height: 1.7 m) walked, hopped, and sprinted while wearing an instrumented insole. The insole features two pressure sensors and a mechanical housing. The mechanical housing held an Arduino/Genuino 101 programmed using Arduino Software Integrated Development Environment (IDE). An artificial neural network (ANN) training and real-time classification software was written in Arduino IDE and downloaded onto the Arduino 101’s non-volatile memory. The ANN used pressure and time derivative data from a dual sensor array and was tested with various statistical parameters. The moving average, standard deviation, min, max, time derivative and acceleration proved most significant for effective training and precision realtime classification. The on-line validation produced mixed accuracy: walking, running, and sprinting were classified with higher than 70% accuracy, but hopping was classified with only 25% accuracy. It is concluded that insole instrumentation with supervised machine learning seem promising to help track FLS deployment. The lower classification accuracy associated with hopping may be due to higher signal variability.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Physical activity (PA) interventions pervade many multi-setting programs, including school-based programs, aimed at preventing or controlling obesity [1]. Given recommendations that children and youth engage in 60 min or more of predominantly moderate to vigorous PA every day [2], PA patterns should expectedly feature recurrent deployment of fundamental locomotor skills (FLSs) like hopping, jumping, and running (including variations like sprinting). These movements cost more than six times the energy expended from sitting quietly for one minute and can facilitate neuromuscular and cardiorespiratory fitness [3, 4]. When implemented in children, trainings that involve agility (e.g., sprinting) and plyometric movements (e.g., hopping) are designed to facilitate mastery of FLSs and projected to positively shape physical activity trajectory [5, 6]. Fundamental movement skills include FLSs and are thought to be positively related to PA behavior [7]. The presence of FLSs and children’s PA behavior content has typically been investigated through direct observation [8]. This method is cost and temporally prohibitive. More commonly, accelerometer-based devices are used to output number of steps taken. This method lacks details on activity structure and the specific types of movements that are deployed. Therefore, there is a need for a research device that will allow researchers to directly investigate, understand, and model the relationship between ad hoc interventions and subsequent locomotor behaviors.
PA is any bodily movement generated by skeletal muscle and results in energy expenditure [9]. It has been suggested that motor skill competence mediates engagement in PA [10] and is associated with health-related physical fitness across childhood (i.e., in children aged 4−13 years) [11]. Chen et al. [12] concluded that health-related physical fitness components like trunk lift, push-up, and curl-up tests were linked with students’ engagement in PA during physical education, recess, and sports outside school. Castetbon and Andreyeva [13] found that gross motor skills, which involved vertically translating the body’s center of mass (e.g., skipping a minimum of eight consecutive steps, jumping from a standing start, and hopping unilaterally over five consecutive repetition) were inversely associated with obesity and standardized BMI scores. FLSs like jumping, hopping, leaping, and running form the foundation necessary to acquire sport-specific skills and engage in PA across the lifespan [10]. For example, jumping is integral to performing complex activities in a number of sports, including volleyball, basketball, and soccer [14,15,16]. Unlike walking, which emerges automatically across the developmental trajectory, FLSs are acquired through instruction, structured training, context-specific exposure and practice [11]. When adequately developed, these skills can facilitate joint stiffness regulation and powers, which are optimal for many metabolically demanding bipedal movements [17]. Deficits in these skills can engender low self-confidence and can constitute a barrier to PA [18].
While some longitudinal studies have assessed self-reported PA behavior among children who participated in such interventions, others have measured PA behavior using more objective means like accelerometers [19]. The challenge is that while there is some evidence that FMS proficiency may mediate PA behaviors, the specific mechanisms are not lucid. This relationship is further complicated by factors such as health-related physical fitness and ecological factors, including park density and park amenities, which have also been linked with PA behavior. Therefore, it is important to pose more specific questions regarding the relationship between FMS interventions and the deployment frequency and duration of targeted skills. Because FLSs tend to be metabolically expensive, thereby engendering high energy expenditure, it is important to understand whether interventions that promote FLSs among children result in increased deployment frequency and duration.
Wundersitz et al. [20] previously classified activity types using time and frequency domain features of gyroscope and accelerometer signals and multiple approaches, namely Logistic Model Tree, Random Forest, and Support Vector Machine. Their Logistic Model Tree algorithms showed the highest classification accuracy (79−92%) a walk, tackle, standing stationary, sprinting, jogging, change of direction, and a countermovement jump. However, their movement capture durations varied between 0.5 to 1.5 s [20]. Shorter duration capture was considered optimal for accelerometer-based classification training, because they exclude non-pertinent movement data (i.e., noise) [20]. It is unclear whether this method would remain accurate during longer duration movements. While instrumented insoles have been used to extract spatiotemporal gait features [21] and detect fall events [22], they have yet to be implemented to classify FLSs and associated temporal features.
To that end, the current work explored the feasibility of implementing artificial intelligent technologies to classify different modes of human locomotion using input from an instrumented insole. Although various wearable PA tracking devices are pervasive, many use accelerometers and gyroscopes and are typically worn around the wrist. As such, they are subject to artifacts and require many more features (upwards of 37), in order to accurately classify lower extremity-driven movements [20]. This requires greater processing power and time [20]. Additionally, activities like riding outdoor bicycles or stationary indoor exercise bikes become difficult to detect or quantify, because the upper limbs are generally stationary in these contexts (the hands usually grasp the handle bars for support stability). In contrast, this work focuses on using pressure-related data from an instrumented insole to classify locomotor modes, especially considering that these movements are primarily undertaken using the lower extremities. This method is expected to require fewer features for classification.
This study has two primary aims: (1) present the design of an instrumented insole that uses foot pressure data from a dual sensor array to classify three FLSs (i.e., hopping, running, and sprinting) and a non-fundamental locomotor skill (i.e., walking), and (2) present an initial feasibility assessment by means of accuracy estimates of the ad hoc ANN’s classification of the foregoing locomotor modes. The device and proposed method could allow researchers track and answer elusive questions regarding the relationship between FLS training and movement competency interventions and locomotor activity behavior and structure, especially during unsupervised play in children. The device could also allow researchers model the relationship between FLS deployment frequency and weight trajectories, especially among children.
2 System Development
2.1 Mechanical Design
To fulfill the requirements for an ergonomic design of a wearable system for FLS classification and motion triggering, the physical interaction between the human users and the elements of the system needed be carefully taken into account. Most wearable devices are parallel and physically coupled with a human limb. Therefore, the ergonomic design of wearable sensor/actuator devices, in particular, should be compliant with the human model in terms of anatomical, anthropometric and biomechanical characteristics. In order to make the wearable device comfortable, we designed the device to wrap around the tarsus. Pressure sensors were placed to coincide with the first metatarsal head and medial rear foot, in order to optimally sense foot pressure. While the average adult tarsus radius helped informed the dimensions of the current insole, its dimensions can be easily modulated to suit a variety of foot sizes. The design of the mechanical housing of the wearable device is shown in Fig. 1. Notably, the ankle-mounted mechanical housing is fairly bulky in size; however, it contains all of the mechanical and electrical devices in multi-layered housing for ease of maintenance and operation.

Mechanical housing of the wearable device
2.2 Electrical Design
The brain of the real time ANN is an Arduino 101 (Intel Corporation, Santa Clara, CA). The Arduino/Genuino 101 is a development board, which contains the Intel® Curie™ Module, designed to integrate the core’s low power-consumption and high performance with the Arduino’s ease-of-use.
In order to make the wearable device wireless, we used the 101 Bluetooth Low Energy technology. The Arduino/Genuino 101 is programmable using the Arduino Software (IDE), our Integrated Development Environment common to all our boards. These ran both online and offline. The overall electrical diagram is shown in Fig. 2.

Electrical diagram
The ANN training and real-time classification software was written in IDE and downloaded onto the non-volatile memory. Two thin (0.2 mm) circular (diameter 9.53 mm) force sensitive resistors (i.e., FlexiForce A301 sensors) (Teksan, South Boston, MA) capable of measuring up to 25 lbs. were connected through the analog inputs. Two vibrator actuators were connected through the Arduino relay shield. Although shown in pertinent figures, further information on the vibration actuators is not presented, as it is outside the scope of this paper. The force range of the Flexiforce sensors were adjustable by varying the voltage drive applied and the resistance of the feedback resistor. A 6 V battery with a power on/off switch on the housing was integrated, in order to drive the force sensor amplifier.
2.3 Artificial Neural Network (ANN) Design
ANNs are a very rough model of how the human brain is structured. ANNs are composed of units of calculation called neurons. These artificial neurons are connected by synapses with weighted values.
ANN emerged as a more meaningful approach to solving problems, given increased computer processing power and the availability of big data. Among the core enablers is the backpropagation mechanism that helps train an ANN to solve specific non-linear problems. When the result is unexpected, an error is calculated, and the values at each neuron and synapse are propagated backwards through the ANN for the next time. This process takes big data for an ANN to be trained correctly. In an ANN, there is an input layer (i.e., the data), a hidden layer, and an output layer. From the perspective of the problem scope of the locomotion classification, we start with an assumption that one hidden layer suffices to solve the problem. After several iterations, we finalized the ANN structure with 12 inputs nodes, 8 hidden nodes and 4 output nodes as follows (Fig. 3). The details of the ANN design are finalized during the ANN training, which is detailed in the next section.

Artificial Neural Network (ANN) design
3 Experiment
3.1 Protocol
A college age young adult male (age: 20 years; height: 1.7 m; mass: 74 kg) wore their regular running shoes fitted with the instrumented insole on their dominant side. They then walked for 33 s, ran for 28 s, sprinted for 19 s, and hopped unilaterally for 42 s on a single belt Merax JK1603E treadmill (Merax Fitness, City of Industry, CA). The Texas A&M University – Corpus Christi Institutional Review Board approved this study.
3.2 ANN Training
The supervised training was used. In the training phase, the correct class for each record was kept and used for the supervised training process. During the training, the target value of each locomotion mode was compared to the output value with 0.5 of initial weighting on each propagation. The error terms between target and actual output were then used to adjust the weights in the hidden layers, in order to drive subsequent outputs closer to the target values (i.e., a feedforward mechanism).
A key feature of neural networks is an iterative learning process in which data cases (rows) are presented to the network one at a time, and the weights associated with the input values are adjusted each time. After all cases are presented, the process often starts over again. During this learning phase, the network learns by adjusting the weights so as to be able to predict the correct class label of input samples. As shown in Fig. 5, the training data have a high level of noise. The advantages of neural networks include their high tolerance to noisy data, as well as their ability to classify patterns on which they have not been previously trained. Therefore, we will test the ANN classification with data used for training (off-line validation) and with data not used for training (on-line validation).
The network processes the records in the training data one at a time, using the weights and functions in the hidden layers, then compares the resulting outputs against the desired outputs. Errors are then propagated back through the system, causing the system to adjust the weights and apply them to the next record to be processed. We trained the ANN 1000 times and compared the total least square error with the desirable goal. The goal value of the ANN was set to 15 with 12 inputs.
Input Layer.
The input layer of the ANN was composed of 12 data sets as listed in Table 1. Note that some networks did not learn. This could be because the input data did not contain the specific information from which the desired output was derived. Therefore, we tested different sets of input data starting with the raw sensor data. As a result, a total of 12 sets of data were identified for the adequate classification accuracy of up to 70% (Table 1). Networks also do not converge, if there is not enough data to enable complete learning. Ideally, there should be enough data so that part of the data can be held back as a validation set. We trained the ANN with the average number of data set of 100 for each locomotion mode. Therefore, a total of 400 data were used to refine the ANN weights. The front and rear sensors were positioned to approximately coincide with the first metatarsal head and medial tubercle of the calcaneus, respectively (Fig. 4).

Sensor implementation at insole
Output Layer.
We tested two possible configurations of the output layer. One was the single node of decimal value from 0 to 4. The other was the digital 0, 1 value of each node with 4 nodes to cover 5 different locomotion layers. The latter turned out to be more accurate in classification. Therefore, we structured the output layer of the ANN with 4 neurons as listed in Table 2.
4 Preliminary Data Analysis
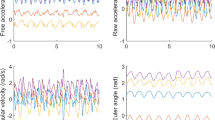
In order to train the ANN, we collected data across four locomotor modes (Fig. 5). Although there are observable patterns, we were initially unable to train the ANN successfully; the classification accuracy was only up to 30%. In order to enhance the classification accuracy, we trained and tested the ANN with various statistical parameters to find the most significant ones. Over the period of experiments, we discovered several significant parameters (i.e., features) for effective training and precision realtime classification. Therefore, we explored parameters that were statistically relevant/meaningful to the training objective from the raw locomotion data, in order to bring the classification accuracy up to 70%. As listed in Table 1, we identified six features from the raw data from each sensor. A total of 12 features served as input to the ANN. Each input is shown in Figs. 6, 7, 8 and 9. In order to generate all six features, we processed the raw data by following the data processing sequence as shown (Fig. 10). Each data was sampled every 100 ms, so we collected 10 raw data per second.

Raw data for 4 locomotion modes

Walking data

Running data

Sprinting data

Hopping data

Data processing sequence
5 Results and Discussion
5.1 ANN Classification
In this section, we share the results and discuss the ANN classification. Notably, the off-line validation, which used the same data as the training, demonstrated 100% for all four locomotion modes. In on-line validation, most of the locomotion modes were classified with greater than 70% accuracy, except hopping. As shown in Fig. 5, the noise level in hopping tended to be very high compared to other locomotion modes. This may be primarily due to the fact that the wearer likely did not depress the two sensors in a consistent pattern during the stance phase of each hop. Specifically, the participant appeared to depress the sensor at the medial tubercle of the calcaneus with relatively more variable pressure during each hop. Tables 3 and 4 show the off- and on-line validation outputs for each of the four locomotor modes.
This work attempted to classify FLSs by solely using force-sensitive resistors (FSR) sensors. A system designed to track FLS deployment duration and frequency during leisure time PA among children has to be wearable and practical. Therefore, excluding additional sensors like accelerometers was an important initial hardware consideration to minimize the systems’ cumbersomeness and energy requirements. However, the lack of other opportunistic sensor integration may have detracted from the current classification outcomes. Cates et al. [22] recently designed a multi-sensor insole by integrating four force-sensitive resistors and an inertial measurement unit accelerometer to detect high acceleration fall events from low acceleration activities of daily living. Their algorithm involved 45 features, and 15 of these were from FSR data. Although they concluded that a multi-sensor system produced increased classification accuracy, they conceded that such design is associated with increased user discomfort. Their work also underscored the challenge of classifying comparably high acceleration movements using accelerometer data features. Running, jumping, and hopping are consistent with high acceleration movements; therefore, it is unclear whether integrating accelerometry and related vector magnitude features may boost relative classification accuracy in the current design [22].
6 Limitations
The current work is has several limitations. The insole only has two integrated FSR sensors. Considering the placement of these sensors, pressure data from the midfoot region was likely not captured. Capturing and integrating pressure data across more foot regions may enhance the accuracy of classifying more variable movements like hopping. The training data was relatively diminutive and originated from one participant. There is need to collect more data, in order to optimize the algorithm training. Further, additional instrumented insole data features, including ones in the frequency domain should be explored, in order to potentially improve hopping classification accuracy up to 70% or higher. Future research will aim to classify additional FLSs like jumping and non FLS lower extremity-based movements like bike riding.
7 Conclusion
This paper explored the feasibility of using data from an instrumented insole to classify running, hopping, sprinting, and walking. During the off-line validation, we achieved 100% classification accuracy; however, the on-line validation produced mixed accuracy. Walking, running, and sprinting were all classified with higher than 70% accuracy in the on-line validation, but hopping was classified with a 25% accuracy. The level of variability in hopping tended to be high compared to other locomotor modes. This may have been due to the fact that the wearer did not depress the sensors using similar pressure patterns during each hop. It is concluded that an ANN technology using features generated from foot pressure data appears promising to classify the locomotor modes that are often the subject of many movement competency interventions. This may provide important insight into children’s FLS deployment and their overall movement content, particularly during leisure time PA. This knowledge may help inform movement competency interventions and how these may shape moderate to vigorous PA behaviors, especially in the context of preventing or controlling overweight and obesity. The device overcomes some limitations associated with wrist worn activity trackers, including artifacts and decreased predictability of upper extremity movement patterns during primarily lower extremity-driven movements. It also minimizes the need for excessive features, which was previously reported to increase processing time.
Although the wearer did not report any discomfort associated with the device, future work will aim to miniaturize the mechanical housing and assess its usability.
References
Bleich, S.N., Vercammen, K.A., Zatz, L.Y., Frelier, J.M., Ebbeling, C.B., Peeters, A.: Interventions to prevent global childhood overweight and obesity: a systematic review. Lancet Diabetes Endocrinol. 6, 332–346 (2018)
Armstrong, B., Lim, C.S., Janicke, D.M.: Park density impacts weight change in a behavioral intervention for overweight rural youth. Behav. Med. 41, 123–130 (2015)
Myer, G.D., Faigenbaum, A.D., Ford, K.R., Best, T.M., Bergeron, M.F., Hewett, T.E.: When to initiate integrative neuromuscular training to reduce sports-related injuries and enhance health in youth? Curr. Sports Med. Rep. 10, 155–166 (2011)
Cattuzzo, M.T., et al.: Motor competence and health related physical fitness in youth: a systematic review. J. Sci. Med. Sport 19, 123–129 (2016)
Pereira, S.A., Seabra, A.T., Silva, R.G., Zhu, W., Beunen, G.P., Maia, J.A.: Correlates of health-related physical fitness levels of Portuguese children. Pediatr. Obes. 6, 53–59 (2011)
Stodden, D.F., True, L.K., Langendorfer, S.J., Gao, Z.: Associations among selected motor skills and health-related fitness: indirect evidence for Seefeldt’s proficiency barrier in young adults? Res. Q. Exerc. Sport 84, 397–403 (2013)
Bremer, E., Cairney, J.: Fundamental movement skills and health-related outcomes: a narrative of longitudinal and intervention studies targeting typically developing children. Am. J. Lifestyle Med. 20, 1–12 (2016)
Han, B., Cohen, D., McKenzie, T.L.: Quantifying the contribution of neighborhood parks to physical activity. Prev. Med. 57, 483–487 (2013)
Caspersen, C.J., Powell, K.E., Christenson, G.M.: Physical activity, exercise, and physical fitness: definitions and distinctions for health-related research. Public Health Rep. 100, 126–131 (1985)
Stodden, D.F., et al.: A developmental perspective on the role of motor skill competence in physical activity: an emergent relationship. Quest 60, 290–306 (2008)
Stodden, D.F., Gao, Z., Goodway, J.D., Langendorfer, S.J.: Dynamic relationships between motor skill competence and health-related fitness in youth. Pediatr. Exerc. Sci. 26, 231–241 (2014)
Chen, W., Hammond-Bennett, A., Hypnar, A., Mason, S.: Health-related physical fitness and physical activity in elementary school students. BMC Public Health 18, 195 (2018)
Castetbon, K., Andreyeva, T.: Obesity and motor skills among 4 to 6-year-old children in the united states: nationally-representative surveys. BMC Pediatr. 12, 1–9 (2012)
Mcerlain-Naylor, S., King, M., Pain, M.T.G.: Determinants of countermovement jump performance: a kinetic and kinematic analysis. J. Sports Sci. 32, 1805–1812 (2014)
Ryan, W., Harrison, A., Hayes, K.: Functional data analysis of knee joint kinematics in the vertical jump. Sports Biomech. 5, 121–138 (2006)
Domire, Z.J., Challis, J.H.: Maximum height and minimum time vertical jumping. J. Biomech. 48, 2865–2870 (2015)
Lazaridis, S., Bassa, E., Patikas, D., Giakas, G., Gollhofer, A., Kotzamanidis, C.: Neuromuscular differences between prepubescents boys and adult men during drop jump. Eur. J. Appl. Physiol. 110, 67–74 (2010)
van Schijndel-Speet, M., Evenhuis, H.M., van Wijck, R., van Empelen, P., Echteld, M.A.: Facilitators and barriers to physical activity as perceived by older adults with intellectual disability. Intellect. Dev. Disabil. 52, 175–186 (2014)
Pate, R.R., et al.: An intervention to increase physical activity in children: a randomized controlled trial with 4-year-olds in preschools. Am. J. Prev. Med. 51, 12–22 (2016)
Wundersitz, D.W., Josman, C., Gupta, R., Netto, K.J., Gastin, P.B., Robertson, S.: Classification of team sport activities using a single wearable tracking device. J. Biomech. 48, 3975–3981 (2015)
Crea, S., Donati, M., De Rossi, S.M., Oddo, C.M., Vitiello, N.: A wireless flexible sensorized insole for gait analysis. Sensors (Basel) 14, 1073–1093 (2014)
Cates, B., Sim, T., Heo, H.M., Kim, B., Kim, H., Mun, J.H.: A novel detection model and its optimal features to classify falls from low- and high-acceleration activities of daily life using an insole sensor system. Sensors (Basel) 18(4), 1227 (2018)
Acknowledgement
This work was funded by Texas Comprehensive Research Fund from Texas A&M University-Corpus Christi Division of Research and Innovation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Ajisafe, T., Um, D. (2019). Exploring the Feasibility of Classifying Fundamental Locomotor Skills Using an Instrumented Insole and Machine Learning Techniques. In: Duffy, V. (eds) Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Human Body and Motion. HCII 2019. Lecture Notes in Computer Science(), vol 11581. Springer, Cham. https://doi.org/10.1007/978-3-030-22216-1_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-22216-1_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-22215-4
Online ISBN: 978-3-030-22216-1
eBook Packages: Computer ScienceComputer Science (R0)