
Abstract
This chapter is divided into three parts; the problem, possible solutions and the chosen option to address the problem, which is my PhD topic within the project MAREWINT. So firstly, the chapter presents an overview of the typical damages that a wind turbine blade can suffer during its life operation. Then, a review of different Structural Health Monitoring (SHM) techniques which are currently being investigated for wind turbine blades is presented. Finally, the chapter provides the state-of-the-art of Guided Wave Technology in composite materials; where different aspects of this SHM technique are explained in more detail.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Wind energy is an important renewable energy source which has gained high relevance during the last decades. Different countries have released plans to invest in wind energy in the future years; such as the USA that will generate 20 % of the country’s electricity from wind power by 2030 or Denmark that have set the targets of producing 50 % of the power from the wind by 2020 and also of making Denmark completely free of dependence on fossil fuels by 2050. So, the use of wind power is not expected to decrease within the next decade (Márquez et al. 2012). The trend is to manufacture bigger wind turbines and deploy them offshore. These new wind turbines have around 6 MW power output, 120-metre height tower and 80-metre long blades. They are designed to be operating in rough conditions in difficult-to-reach areas. Therefore, the deployment of Structural Health Monitoring (SHM) techniques becomes essential in order to assess remotely the integrity of the structure. The advantages of using these techniques are many (Schulz and Sundaresan 2006), such as reducing expensive costs for periodic inspections of turbines which are hard to reach, prevention of unnecessary replacement of components based on time of use, or minimizing down time and frequency of sudden breakdowns.
2 Structural Damages in Wind Turbine Blades
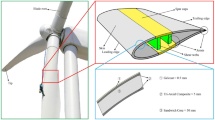
Wind turbine blades are composed by composite materials, mainly glass fibre, carbon fibre, balsa wood or foam, in order to improve efficiency by increasing the strength-weight ratio. The structure can be represented as a rectangular beam formed by the upper and lower spar caps and by two vertical shear webs, providing bending stiffness and torsional rigidity in order to withstand all the loads applied on the blade. The aerodynamic shape is given by two shells joint to the spars at both sides. Highly-toughness adhesive is used to bond both shells to each other at the leading and trailing edges, and also to join the shear webs to the spar caps. The outside of the blade is covered by a gel coat to be protected from ultraviolet degradation and water penetration. Typically in offshore wind turbine blades, the spar caps are formed by a thick laminate of glass fibre or glass/carbon hybrids, while the shells and the shear webs are sandwich panels composed by glass fibre skins and a thick foam or balsa wood core.
All those structures are susceptible to be damaged since they are continuously in operation under cycle loads in harsh environments. Structural damages, such as debonding or delamination, can be potentially generated in a number of ways.
-
Leading Edge Erosion: It is a damage produced by abrasive airborne particles which impact and erode the leading edge, especially affects the region close to the tip where the velocity is higher. This erosion modifies the aerodynamic shape of the blade reducing the aerodynamic efficiency and hence, the power production. It also creates delaminations along the leading edge (Sareen et al. 2014).
-
Lightning: The blades are the most vulnerable parts of the wind turbine to be impacted by a lightning. Currently, all blades have in place a lightning protection system to reduce as much as possible the damages generated by the impact, since otherwise the blade could be destroyed. Although it is common to have damages and cracks around the point of lightning attraction (Cotton et al. 2001).
-
Icing: It is the accumulation of ice on the surface of the blade due to the combination of particular climate conditions and low temperature climate (Cattin 2012). Several problems can be caused by icing, such as the complete stop of the wind turbine due to highly severe icing, the disruption of aerodynamics with a reduction in energy generation or the increased fatigue due to imbalance loads caused by the ice mass resulting in a shortening of the structure lifetime (Homola 2005).
-
Fatigue loads: Wind turbines are designed to be in continuous operation an average of 20 years. During this time, blades are permanently withstanding cycle loads which could lead in the creation of incipient damages due to fatigue mechanisms and then consequently their propagation till the collapse of the entire structure.
The different types of damages that a wind turbine blade can suffer during operation are reviewed in (Debel 2004) as follows. In Fig. 3.1, they are represented for further clarifications.

Sketch of the different types of damage that can occur in a wind turbine blade (Sørensen et al. 2004)
-
Type 1: Damage formation and growth in the adhesive layer joining skin and main spar flanges (skin/adhesive debonding and/or main spar/adhesive layer debonding)
-
Type 2: Damage formation and growth in the adhesive layer joining the up- and downwind skins along leading and/or trailing edges (adhesive joint failure between skins)
-
Type 3: Damage formation and growth at the interface between face and core in sandwich panels in skins and main spar web (sandwich panel face/core debonding)
-
Type 4: Internal damage formation and growth in laminates in skin and/or main spar flanges, under a tensile or compression load (delamination driven by a tensional or a buckling load)
-
Type 5: Splitting and fracture of separate fibres in laminates of the skin and main spar (fibre failure in tension; laminate failure in compression)
-
Type 6: Buckling of the skin due to damage formation and growth in the bond between skin and main spar under compressive load (skin/adhesive debonding induced by buckling, a specific type 1 case)
-
Type 7: Formation and growth of cracks in the gel-coat; debonding of the gel-coat from the skin (gel-coat cracking and gel-coat/skin debonding).
Ciang et al. (2008) also presented the most likely locations of the blade where damages can appear, which are at 30–35 % and 70 % of the blade length from the root, the root of the blade, the maximum chord area, and the upper spar cap/flange of the spar.
3 SHM on Wind Turbine Blades
The value of the blades is around the 15–20 % of the total costs of the wind turbine (Li et al. 2015a, b), thus the blades are critical parts that need to be monitored in order to ensure the cost-efficiency of the entire structure and its integrity. Currently, the blade assessment is based on costly periodic manned inspections. The techniques used are visual inspections and manual tapping tests, which require highly experienced experts. These techniques are not able to detect internal damages at early stages, so different NDT and SHM techniques have come out to fill this gap. In the following, current SHM techniques applied to wind turbine blades are presented.
3.1 Modal Analysis
This technique is based on the analysis of the dynamic response of the wind turbine blade during operation. The modal parameters extracted from the structure, such as frequencies and modal shapes, are directly related to the physical properties of the blade, such as mass and stiffness. Therefore, the analysis of modal parameters will detect variations in the physical properties, such as stiffness reduction caused by incipient damages or mass increasing caused by icing. In order to apply this technique, it is required to induce an excitation over the structure. Ideally for a SHM application, it would be preferred to use an ambient energy during the normal operation of the wind turbine, such as the blade vibrations caused by the wind turbulence which has been proved that excites a wide range of blade modes (Yang et al. 2014; Requeson et al. 2015). Other excitation sources used in this analysis are external shakers or embedded actuators which usually provide better results since a well-distributed excitation is created over the entire structure and also a flat spectrum is generated in the desired frequency range. To monitor the modal responses accelerometers, piezoelectric transducers and strain gauges are used.
Damage identification method is commonly based on the comparison between an undamaged and a damaged state. Simple analyses using the eigenfrequencies are valid for controlled laboratory tests, but under more realistic conditions these methods are unable to detect damages, since the modal property variations caused by them are the same order as the ones created by the environmental effects and noise contamination (Salawu 1997). Therefore, sophisticated and robust methods, such as continuous wavelet transformation, have to be used along with modal analysis in order to be deployed as a SHM application (Ulriksen et al. 2014).
Figure 3.2 depicts a modal measurement setup. The advantages of Modal Analysis are that it is a mature technology widely used for gearbox and bearing faults, feasible, well-proven and low cost. The disadvantages are small sensitivity (detection of relatively big damages), so there is a necessity to have a fine measurement density (more sensors) and the impossibility to install sensors close to the tip due to the small section since they should be placed inside the blade for SHM applications.

Modal measurement system setup for SSP 34 m blade: (a) accelerometer location and orientation; and (b) utilized accelerometers (Brüel & Kjær Type 4524-B) mounted on a swivel base (Brüel & Kjær UA-1473) (Ulriksen et al. 2014)
3.2 Fibre Optics
Optical fibres are cylindrical dielectric waveguides designed to propagate the light along its length. The core of the fibre has a refractive index slightly higher than the core cladding, so when the light confined in the core reaches the cladding/core interface with an angle greater than the critical angle (Snell’s law); the light is reflected back to the core enabling its propagation along the fibre (Ostachowicz and Güemes 2013). The light may leaks out when the optical fibre is bent with sharp radius; decreasing the optical power transmitted. This principle is used as a damage detection technique, called microbending fibre, where two solid corrugated parts bend the fibre, so relative displacement between both parts will cause sharper or flatter bends (decreasing or increasing the transmitted optical power) enabling the local monitoring of the structure. Optical fibres can be used to measure different type of properties, such as strain, temperature, loads or vibrations.
In wind energy applications, they have been mainly used as strain sensors. Two different measurement techniques have been utilized to monitor the strain in wind turbine blades, Fibre Bragg Gratings (FBGs) and distributed sensing. FBGs are local sensors with high sensitivity and reliability, allowing the possibility to multiplex several FBG sensors in a single optical fibre. In recent years, most of the investigations about fibre optic applications have been related to FBGs due to the variety of advantages that they offer (Choi et al. 2012; Glavind et al. 2013; Kim et al. 2013, 2014). FBGs are periodic variations in the refractive index of the core of the optical fibre. These refractive index variations are equally spaced a distance, Λ0, and they behave like multiple mirrors which reflect a very narrow wavelength window, λB, of the light spectrum transmitted along the fibre, following this equation, Eq. (3.1):
where \( \overline{n_e} \) is the average refractive index. Therefore, when the FBG is attached to a structure and it is strained or affected by changing temperature, the distance between the periodic variations changes, so the reflected wavelength shifts linearly enabling the monitoring of the local strain or temperature. In (Sierra-Pérez et al. 2016), a comparison between strain gauges and FBGs is studied for wind turbine applications, see Fig. 3.3. Both present similar detection capabilities and sensitivities, but FBGs offer comparative advantages, such as electromagnetic immunity, possibility to be embedded into composites or longest life. So, thinking in a future SHM application for wind turbine blades, FBGs would be more suitable than strain gauges. The other measurement method is the distributed sensing, where the entire length of the fibre works as a sensor. Several sensing methods have been used to provide distributed sensing; being the most used the Optical Frequency Domain Reflectometry (OFDR) based on the Rayleigh scatter. This Rayleigh backscattering component is caused by changes in density or composition along the fibre, so by controlling the slope of the decaying intensity curve, it is possible to identify breaks and heterogeneities along the fibre (Sundaresan et al. 2001). This technique can be used to measure the strain and the temperature with high resolution (better than 1 με and 0.1 °C) (Sierra-Pérez et al. 2016), and also with a high spatial resolution along the fibre, in the order of millimetres. Strain measurements in wind turbine blades have been performed in recent investigations (Pedrazzani et al. 2012; Niezrecki et al. 2014; Sierra-Pérez et al. 2016) with good results, but this technique is almost limited to static tests because the acquired light power is too low, so several test repetitions are needed to increase the Signal to Noise Ratio (SNR).

Example of strain profiles for seven load magnitudes along the blade length gathered with the OBR (distributed sensing), the FBGs and the strain gauges. Sensors located at intrados, trailing edge. Results for a Wind Turbine Blade test in flapwise configuration, pressure side to suction side (PTS) (Sierra-Pérez et al. 2016)
The advantages of Fibre Optics are its high sensitivity, small size (may be embedded in composites), low weight, immunity to electromagnetic interferences and electrical noise, fatigue resistance and wide operation temperature range. The disadvantages are its fragility, highly costly equipment and bulky equipment.
3.3 Guided Wave Technology
Guided waves (GW) are ultrasonic elastic waves that propagate in finite solid media. The technique is based on the analysis of guided waves which have propagated along the structure. Piezoelectric transducers are attached on the structure and excited by a signal generator with a predefined input signal, usually an n-cycle sinusoidal pulse with a Hanning window centred at a specific frequency. The transducers convert the electrical input into mechanical strain which enables the generation of the wave into the structure. The waves propagate along the structure passing through/interacting with defects, such as delamination, debonding, cracks or thickness reduction due to corrosion. This interaction makes the wave change during its propagation enabling the identification of damage. The waves can be acquired by the same transducer, in a Pulse-Echo configuration, where the damage is detected by the echoes reflected backwards when the wave passes through the defect; or acquired by another transducer, in a Pitch-Catch configuration where the damage is detected due to changes in amplitude, phase or time of flight (TOF) of the acquired wave modes. The great advantage is that GW technology inspects wide areas from a small number of points, in contrast to the others techniques which are locally, like conventional ultrasonic testing, see Fig. 3.4.

Comparison of the inspected area between ultrasonic testing and GW testing
Commercially, GW technology has been successfully applied for inspection of pipelines in the oil & gas industry (Mudge and Harrison 2001). This inspection is able to scan tens of metres from one position and detect wall thickness variations caused by corrosion. In wind turbines where the structure is composed by different materials, such as glass fibre, carbon fibre or balsa; the complexity of the wave propagation increases hindering the application of GW. In recent years, there have been many investigations studying the utilization of GW technology on wind turbine blades for damage detection (Claytor et al. 2010; Taylor et al. 2012, 2013a, b; Zak et al. 2012; Song et al. 2013; Li et al. 2015a, b). It has been demonstrated that GW are capable to detect composite damages (Su et al. 2002; Hay et al. 2003; Discalea et al. 2007; Sohn et al. 2011), such as delamination, debonding or fibre cracking; and also to locate the damages analysing the TOF of the wave modes. One issue for GW application in blades is the wave attenuation, since the amplitude of the wave decreases rapidly during its propagation in this type of materials allowing the inspection within a limited area. The higher the wave frequency, the higher the attenuation. Investigations about ice detection and ice removal in wind turbine blades have been also carried using GW technology (Habibi et al. 2015; Shoja Chaeikar et al. 2015). The use of GW for composite materials is still in development, but it is seen as a promising technique for the future.
Another important improvement that is needed for the implementation of this technology in wind energy is the reliability. Wind turbine operators are usually reticent to install extra equipment in their turbines after investing a great deal of money. Therefore, more robust and reliable systems (transducers and equipment) are required in order to deploy this technology in wind turbine blades. Investigations in self-diagnosis of transducers during operation have been carried out by Taylor et al. (2013c), where they proposed a technique to analyse the impedance of the transducer in order to distinguish between structural damage and transducer malfunction, avoiding false positives in damage detection.
Figure 3.5 depicts a signal that can be acquired through the application of Guided Wave Technology in an aluminium plate. The advantages of Guided Wave Technology are that it is able to detect external and internal damages at early stages, it is capable to inspect large areas from a few locations, it is cost-effective and the transducers are small. The disadvantages are its improvable reliability and its bulky equipment.

Example of a signal acquired in a “pitch-catch” configuration in an aluminium plate. The two fundamental wave modes are highlighted, symmetric S0 and antisymmetric A0 modes
3.4 Acoustic Emission
Acoustic Emission (AE) technique is based on the acquisition of transient elastic waves generated from a rapid release of energy caused by a damage or deformation (Pao et al. 1979). This wave generation can be produced by various phenomena such as cracks, rubbing, deformation, leakage, etc. The most detectable AE signals take place when plastic deformation is caused in the material or when it is loaded near its yield stress (NDT 2016). These phenomena create elastic waves which propagate in the material. The AE sensors, usually made of piezoelectric material, convert the strain caused by the elastic waves into electrical energy enabling the processing and signal analysis.
AE waves are comprised in a broad frequency range between 100 kHz and 1 MHz (Li and He 2012); conversely the waves in a lower frequency range are called vibration. The most common signal processing technique is to extract features from the time-domain signal due to its simplicity. However, more advanced signal processing techniques, such as wavelet transform, pattern recognition or classification methods, are needed in order to assess in a better manner the integrity of the structure (Chacon et al. 2015). This technique has been used in rotating machines and metallic structures, such as tanks or bridges with good results (Rauscher 2004; Nair and Cai 2010; Chacon et al. 2014). In wind turbine blades, AE has been applied in different investigations where it has been able to detect typical composite damages such as delamination or debonding (Han et al. 2014; Zhou et al. 2015). However, due to the high frequency content of the AE signals, attenuation is a major obstacle for this technique, especially in composite materials. Consequently, early stage damages where the amplitude signal is low will not be detectable, unless the sensors are placed close to the damage. Other disadvantages are that it is expensive and it generates large datasets due to the high sampling rate. Figure 3.6 shows an example of an acoustic emission signal.

Example of an AE signal
3.5 Thermography
Thermal imaging technique is based on the measurement of the heat on the surface of the inspected structure in order to detect internal defects by observing temperature differences. The basic idea is that the thermal diffusivity will change if irregularities are present in the material, so temperature differences will be observable externally. There are two approaches to apply this technique, passive and active. The passive method is utilized when the materials to inspect have different temperature in comparison to the ambient temperature. And the active method is when external excitation, such as heat lamps, is used to apply thermal energy into the specimen making more clearly the temperature differences.
Two big concerns with this technique are the limitation of amount of thermal energy applied on the surface of the structure, and the difficulty to apply thermal energy over large surfaces in a uniform manner (Manohar 2012). The former is caused by the application of too much energy to the surface in order to generate sufficient contrast to detect deeper defects which may cause permanent damages. The latter is due to non-uniform heating (unwilling temperature differences) which could cause erroneous results and the reduction of the accuracy of the technique. This limitation makes quite difficult its applicability in wind turbine blades during operation. Further investigations are needed to overcome this problem and gain sensitivity to spatial and temporal variations (Manohar 2012).
The advantages of Thermography are that it is a non-contact technique, no baseline is needed and it has a full-field defect imaging capability enabling a rapid structural evaluation. The disadvantages are that it is very difficult to be applied in-service and the equipment is highly costly.
4 Guided Wave Technology in Composites
Guided wave (GW) technology is a growing Non Destructive Testing (NDT) technique in order to inspect and monitor the health of structures. The advantages of this technique are the capacity to scan an area of several metres from few locations and to make the inspection to structures in-service. This allows the system potentially capable to be permanently installed on the structure enabling it to be monitored continuously. Guided Wave technology has been widely applied in metallic structures in order to inspect pipes, plates, rails (Alleyne and Cawley 1992a; Alleyne and Cawley 1992b; Cawley et al. 2003; Hayashi et al. 2003; Rose et al. 2004). During the 1990s, significant research was focused on pipe inspection (Ditri and Rose 1992; Alleyne et al. 1998; Lowe et al. 1998), because there was a need to assess in a rapid manner the integrity of hundreds of kilometres of pipelines in the oil & gas, nuclear and chemical industries. As a result of these investigations, guided wave commercial devices were released to service these industries (Mudge and Harrison 2001) which are able to inspect tens of metres from one position and detect wall thickness variations caused by corrosion.
In addition to metallic structure inspection, composite inspection using guided waves has been investigated in the recent years (Cawley 1994; Monkhouse et al. 1997; Su et al. 2002; Han et al. 2006; Lissenden and Rose 2008; Giurgiutiu and Santoni-Bottai 2011; Castaings et al. 2012; Rose 2012; Torkamani et al. 2014; Baid et al. 2015; Rekatsinas et al. 2015; Zhong et al. 2015). Much interest has arisen in this topic due to the increasing implementation of composite materials in the aerospace and wind energy industries and the necessity to inspect and monitor large composite structures, such as wings or wind turbine blades, in a cost-effective and rapid way. Moreover, composite materials, especially carbon fibre-epoxy due to its high Young’s modulus and high strength to low weight ratio, are commonly used as structural parts like the spar in wings and blades. It is essential the inspection of those members to assure the integrity of the entire structure. Composite materials can be easily damaged when impacted, presenting damages such as delamination or matrix cracking which are difficult to detect in a visual based inspection. Currently, conventional ultrasonic inspection is widely used as the preferred NDT technique for composite structures (Kapadia 2012). This technique is able to detect the most common composite damages (delamination, debonding, porosity), but dependence on manual inspection of parts with difficult accessibility and the slowness of the inspection are obstacles, as well as the interruption of the operation of the entire structure means that an automatic inspection is also desirable. Guided wave technology provides an alternative solution for an in-service assessment of the integrity of the structure which can be deployed automatically. Damage detectability in composites using guided waves has been proved in many scientific publications (Hayashi and Kawashima 2002; Su et al. 2002; Hay et al. 2003; Paget et al. 2003; Sohn et al. 2004; Su and Ye 2004; Park et al. 2005; Discalea et al. 2007; Su et al. 2007; Diamanti and Soutis 2010; Gao et al. 2010; Ramadas et al. 2011; Sohn et al. 2011; Yeum et al. 2012; Torkamani et al. 2014). The anisotropic nature of composites due to the different ply-orientations produces a directional dependence of the wave propagation properties in terms of velocity and wave directionality (Rose 2012) which increases the difficulty of the data analysis. Also the complex designs of in-service composite structures, such as wind turbine blades, which are composed of different materials, e.g. carbon fibre, glass fibre, balsa or honeycomb hinder the implementation of this technique commercially, since it is difficult to extract relevant information from the complex signals. So, many investigations and great progress are being carried out to overcome these issues. acquired in order to assess the integrity of the structure.
4.1 Fundamentals of Guided Waves
Guided waves are elastic waves that propagate in solid plates. The main characteristics of this kind of waves are that the phase velocity and group velocity are not necessarily the same and they can vary according to the frequency, which is called dispersion. Depending on the boundary conditions of the medium where the wave is propagating through, different guided wave modes can be obtained (Rose 2014). In the case of thin plate-like structure (Fig. 3.7) with free upper and lower surfaces, Lamb waves will propagate within both surfaces, established as boundaries, guiding the propagation of the waves. The governing equation of guided wave motion is Navier’s equation, Eq. (3.2) (Rose 2014):

Coordinates for thin plate-like structure
where ui is the displacement in the xi direction, fi is the body force which is assumed to be zero, ρ is the density and λ and μ are the Lamé constants. By using the method of potentials, this second order partial differential equation can be decomposed into two uncoupled parts through Helmholtz decomposition, details in (Rose 2014).
Finally, Eq’s. (3.3a) and (3.3b) are obtained that, together with the displacement equations, it is possible to calculate the motion of the guided waves in an isotropic and homogeneous plate-like structure (Rose 2014):
As it is shown in Eq’s. (3.3a) and (3.3b), the solution of guided wave propagation presents a symmetric (Si) and an antisymmetric (Ai) solution, consequently there will exist in the same plate two different modes of propagation one symmetric and one antisymmetric with respect to the middle plane along the thickness. Both wave motions are represented in Figs. 3.8 and 3.9 respectively.

Symmetric mode of propagation

Antisymmetric mode of propagation
Another wave motion related to guided waves is the shear horizontal (SH) wave mode where the particles displace transversally to the propagation direction, see Fig. 3.10. This mode presents advantages in comparison to Si and Ai in terms of dispersion and attenuation, since the fundamental shear mode is non-dispersive so has less energy attenuation during its propagation (Rose 2014). Because of the non-dispersive nature of shear mode, the wave energy in the direction of propagation does not spread during its propagation, so the energy remains concentrated in the transmitting pulse enabling the wave to achieve longer distances. Also, the in-plane particle displacement of SH wave mode reduces the interaction with the surrounding media (Petcher et al. 2014). So, the wave energy transmitted remains inside the host material minimizing the energy leakage. These advantages are particularly important when a structure which is subsea, buried or with heavy coatings has to be inspected, or when longer distances are needed to reach in order to inspect areas where the accessibility is limited or prohibitive.

Shear mode of propagation
Regarding the attenuation, it may be divided in absorption, scattering and leakage (Wilcox et al. 2001). The first attenuation mechanism is due to the material damping of the host material which converts the wave energy into heat. The second one is produced when part of the wave energy is transmitted or reflected in other directions than the original one. This scattering is mainly produced by defects or irregularities in the way of the wave which reflect part of the wave energy in other directions. This mechanism enables the identification of damages by guided wave technology inspection. And the third one is produced by the energy leakage which is the wave energy transmitted to the surrounding media. This energy transmission depends on the acoustic impedance compatibility between the surrounding material and the host material, the smaller the acoustic impedance mismatch the larger the energy is transmitted to the surrounding media. This energy leakage is commonly negligible for air, but it becomes more influential when coatings, paints or high damping materials are applied on the surface, or even more when the structure is subsea or buried, where the energy loss is highly significant (Wilcox et al. 2001).
4.1.1 Phase Velocity and Group Velocity
Generally, the velocity of guided waves can be described by the phase velocity and the group velocity. These two velocities measure different features of the wave, where phase velocity is the velocity related to the frequency, f, and wavelength, λ, \( {\mathrm{v}}_{\mathrm{p}}=\uplambda \cdot \mathrm{f} \), which is the speed at which any fixed phase of the cycle is displaced. And group velocity is defined as the speed with which the information or energy of the wave propagates through the media. In other words, the speed at which the whole wave packet propagates.
The propagation velocity of the guided waves, in most of the cases, is frequency-dependent. It is different at different frequencies, so consequently frequency components of the same wave packet will travel at different velocities distorting the original input signal along its propagation. This phenomenon is called dispersion, which will be explained further on. A graphic example is shown in Fig. 3.11.

Example of dispersion. (a) Input signal. (b) Non-dispersive wave. (c) Dispersive wave
A consequence of this dispersion is that phase velocity is different to group velocity. In terms of angular frequency, \( \upomega =2\uppi \mathrm{f} \), and wavenumber, \( \mathrm{k}=2\uppi /\uplambda \), phase velocity and group velocity can be expressed as Eq’s. (3.4a) and (3.4b):
4.1.2 Dispersion Curves
The relationship between velocity and frequency can be plotted in graphs called “dispersion curves”, where the variation of different wave mode velocities is shown along the frequency. In Fig. 3.12, dispersion curves of phase velocity and group velocity are represented against the frequency for symmetric and antisymmetric modes of a 3-mm thick aluminium plate.

Dispersion Curves of a 3-mm thick aluminium plate. (a) Phase velocity against frequency. (b) Group velocity against frequency. Extracted from Disperse Software (Pavlakovic et al. 1997)
The dispersion equations of Lamb waves for plate-like isotropic structures are (Rose 2014):
where h is the plate half thickness, k is the wavenumber, cL is the longitudinal velocity, cT is the transverse velocity, ω is the wave angular frequency and λwave is the wavelength. At each frequency, the wavenumber is modified in order to find the roots of the Eq’s. (3.5a) and (3.5b) (Su and Ye 2009). The dispersion curves can be plotted by joining the roots of the different wave modes. These curves are highly important to guided wave damage detection in order to predict the time of arrival, to excite desired modes, to design phased arrays and generally to deploy any guided wave application.
Due to the utilization of finite number of cycles in a pulse to interrogate the structure in guided wave inspection, this technique is especially affected by dispersion. This is because short pulses contain broadband frequency ranges (in the order of tens of kHz) centred at the transmitting frequency, so more different frequency components are involved in the travelling wave packet distorting the acquired signal to a higher extent, instead of using a narrowband input signal. Consequently, when guided waves propagate long distances, very distorted and attenuated signals are acquired for dispersive wave modes. Many of the investigations related to dispersion compensation are based on time reversal, in which the excitation signal is modified in order to concentrate the wave packet energy at a certain distance. Wilcox (2003) also proposed dispersion compensation based on a signal processing methodology, in which the dispersion effect is removed by replacing the time domain signal into a distance domain signal. Very accurate data of the dispersion curves of the studied wave modes is required, as the proposed methodology is very sensitive to small variations.
4.2 Guided Waves in Composites
Composites are characterised by their multi-layered structure, in contrast to metallic materials which are a continuous media with no interfaces. Composites are commonly used in aerospace or wind energy industry, such as carbon fibre/epoxy or glass fibre/epoxy laminates, and constituted by a number of layers orientated at different directions. These layers are formed by fibres and resins. The high anisotropy of the fibres confers to the laminate anisotropic nature, which depends on the stacking sequence of the plies (Nadella et al. 2010). Therefore, a laminate can be highly anisotropic if all the fibres are oriented in the same direction or it can be weakly anisotropic if the fibres are equally oriented in all directions. This anisotropy makes the wave velocity dependent to the angle of propagation, so this angular dependency will be more significant for highly anisotropic composites, unlike the weakly anisotropic laminates which will have a velocity profile similar to the one of an isotropic material (Karmazin et al. 2011).
Another important consequence of the wave propagation in composites is the absence of pure modes of propagation. In isotropic materials Lamb waves have displacements in x and z directions and the shear horizontal only in y direction but in anisotropic materials guided waves have displacements in the three directions (Rose 2012). For example, symmetric modes Si have displacements in the propagating direction (x axis) and in the out-of-plane direction (z axis) but in composites small displacements in the perpendicular direction (y axis) will be induced as well. Consequently, another way to designate these non-pure modes was established. The modes which have their main displacement component in the direction of the wave propagation are called quasi-symmetric qSi, the modes which have the main displacement component in the out-of-plane direction are called quasi-antisymmetric qAi, and the modes with the main displacement component perpendicular to the wave propagation and parallel to the surface are called quasi-shear horizontal qSHi (Karmazin et al. 2013). Hereafter called symmetric Si, antisymmetric Ai and shear horizontal SHi modes for simplicity reasons. The attenuation is another factor to have in mind for guided wave propagation in composites, since it gets significant at higher frequencies, due to the viscoelastic behaviour of the resin which damps the wave energy and also because of the scattering caused by the fibres (Wang and Yuan 2007).
For the dispersion curves creation, it is necessary to make a distinction between isotropic or anisotropic materials. Since for isotropic materials the wave velocity depends only on the magnitude of the wave vector \( \mathrm{k}=\left|\mathrm{k}\right| \), which is the wavenumber. But for anisotropic materials, it is required to consider the magnitude and also the direction of the wave vector. This distinction expands the previous definition of the phase velocity for anisotropic materials in order to involve in the equation the direction of the wave vector, which can be expressed as Eq. (3.6) (Wang and Yuan 2007):
where ω is the angular frequency and k the wave vector. A new concept that was not indicated before for isotropic materials is the slowness. Mathematically, it is defined as the inverse velocity and it is given by Eq. (3.7):
Note that the wave vector direction is always normal to the wave front of constant phase, so the phase velocity and the slowness always have the same direction as the wave vector. In order to calculate the group velocity, the wave vector direction has to be taken into consideration as well. So from the group velocity Eq. (3.4b) presented before, the group velocity can be defined as Eq. (3.8) (Wang and Yuan 2007; Karmazin et al. 2013):
where e k is the unit vector in the radial direction and e θ is the unit vector in the angular direction. The group velocity in Cartesian coordinates can be calculated using a transformation matrix, Eq. (3.9):
So the magnitude of the group velocity is given by Eq. (3.10):
And the angle of the group velocity direction is given by Eq. (3.11):
The difference between the wave vector angle and the group velocity angle is known as the skew angle, \( {\upvarphi}_{\mathrm{skew}}=\uptheta -{\uptheta}_{\mathrm{g}} \). A different way to calculate the skew angle from the complex Poynting vector is described in (Rose 2012). The equation of the Poynting vector is Eq. (3.12):
where \( \tilde{\mathbf{v}} \) is the conjugate of particle velocity vector and σ M is the stress tensor as shown in Eq. (3.13):
The integral of the Poynting vector across the thickness in a specific direction yields the power flow density in this chosen direction. Therefore in the case of plane waves, it is possible to determine the skew angle with Eq. (3.12) by calculating the power flow density in the wave vector direction Pk, and in the perpendicular direction (angular direction) Pθ. For anisotropic materials, Pθ is nonzero for certain wave modes. Hence, this component introduces a wave skew effect, which can be calculated by Eq. (3.14):
This is not the case for isotropic materials, where the component Pθ will be equal to zero as there is no angular dependency of the velocities. So the skew angle will be zero and the wave vector and group velocity will have the same direction.
Geometrically, the wave vector can be related to the group velocity, see Fig. 3.13. The normal direction of group velocity wave front is the direction of the wave vector; vice versa, the normal direction of the slowness curve is the group velocity direction. Figure 3.13 also depicts the skew angle φ, in which the different directions of the group, θg, and phase velocities, θ, are clearly shown.

Relationship between wave vector and group velocity vector. (a) Slowness curve. (b) Group velocity wave front (Wang and Yuan 2007)
4.2.1 Simulation
The simulation of guided waves is an essential step for the understanding of the wave propagation in multi-layered structures and is also useful for validating new damage detection techniques or new transducer arrays. The wide range of different layups makes the experimental analysis of each one individually impracticable; therefore the simulation is used to investigate different materials or layups in an efficient manner. In guided wave analysis of composites, the hypothesis of considering each layer isotropic across the thickness is commonly adopted; each ply is a homogeneous orthotropic layer. This assumption is based on the fact that the wavelengths of the propagating guided waves are substantially longer than the characteristic size of the cross section of the fibres (Tauchert and Guzelsu 1972; Wang and Yuan 2007). In Tauchert and Guzelsu (1972), it is shown that the scattering produced by the fibres of each layer occurs when the wavelength is of the same order of the diameter of the fibres for longitudinal modes, and 40 times the order of the diameter for flexural modes.
The dispersion properties of composite materials and the analysis of the 3D propagation of guided waves are being commonly studied by numerical or analytical methods. Different techniques have been proposed, such as traditional Finite Element Method (FEM) (Lissenden et al. 2009; Song et al. 2009; Ricci et al. 2014), semianalytical finite element method (SAFE) (Hayashi et al. 2003; Deng and Yang 2011; Rose 2014), finite differences (Saenger and Bohlen 2004; Moczo et al. 2007) or applying the elasticity theory using the global matrix and transfer matrix (Wang and Yuan 2007; Karmazin et al. 2011, 2013). Finite Element Methods have limitations due to the available computational resources, since for high frequencies a very fine discretization, both temporal and spatial, is necessary to comply with the Nyquist theorem and to ensure a minimum number of elements per wavelength in order to replicate the wave. This problem is overcome with the use of SAFE, where the waveguide is only discretized in a cross section of the structure, reducing considerably the computational load. In the literature the analytical methods have been established as a good approach for the analysis of guided waves in composites, but they are more susceptible to miss roots of the dispersion equations and distort the results.

Representation of the group velocity wave front in a cross-ply laminate by two different methods. (a) An analytical method using the Fourier Transform of Green’s matrix. Solid line (Karmazin et al. 2013). (b) An experimental technique using scanning air-coupled ultrasonic transducers (SAUT) (Michaels et al. 2011)
The wave mode displacements depending on the angle of propagation and the stacking sequence of the composite have been described in many publications (Rhee et al. 2007; Wang and Yuan 2007; Karmazin et al. 2011, 2013). For instance, it has been shown that the propagation in unidirectional laminates has a preferential direction along the fibre direction. In the case of cross-ply laminates 0°/90°, the simulations show that there are two preferential directions 0° and 90° and it is also noticeable that for the angles in between the wave propagation is at 45° direction, see Fig. 3.14. For quasi-isotropic laminates, the wave front profile is very similar to the isotropic materials; the wave velocity has very small variations with the angle. In Karmazin et al. (2013), the authors analysed the wave propagation in a cross ply laminate using the analytical method of Green’s matrix in a frequency-wavenumber domain. In this work, they concluded that the symmetric mode depends strongly on the wave propagation direction in high anisotropic laminates, in contrast to the antisymmetric modes which weakly depend on the propagation angle, as can be seen in Fig. 3.14. Another important observation in Fig. 3.14 is the shape of the wave front in the shear horizontal mode, which is caused when the curvature of the slowness shifts from convex to concave shape. This effect is well-known in the analysis of bulk waves in anisotropic solids (Wang and Yuan 2007). It is called the phenomenon of energy focusing. Note that near the angles of 7° and 83°, there is a concentration of energy.
In the example shown in Fig. 3.14a, the shear horizontal mode presents several group velocity values—particularly, it presents one, two or three different group velocities for the same direction. Therefore, in these particular multi-valued directions usually called caustics (Karmazin et al. 2013), three pulses of the same wave mode will propagate at different velocities. Note that near the angles of 7° and 83°, there is a concentration of energy carried by the SH0 mode.
4.2.2 Damage Detection
In composite materials, the most common damage is the delamination between plies caused by impacts or cyclic loads. This mode of failure consists in the separation of layers which leads to significant loss of strength. Typically, the flaws created inside the laminate by impacts are not visible to the naked eye, therefore guided wave inspection in composite is highly recommended since the wave modes propagate along the structure sweeping the entire thickness. Internal damages will interact with the propagating wave modes, inducing changes in its propagation pattern. The wave modes will be affected by the delamination in different ways depending on its mode of vibration. In the literature (Grondel et al. 2002; Su et al. 2007; Hu et al. 2008; Ramadas et al. 2009; Rekatsinas et al. 2015), the three fundamental wave modes S0, A0 and SH0 are the most studied and the most commonly used in order to interrogate a structure. The symmetric mode is chosen at low frequencies, below 200 kHz, because they are less dispersive so the shape of the pulse does not spread along the propagation direction which eases the post-analysis and reduce the complexity of the acquired signals. In addition, the symmetric mode has less attenuation since its displacement is an in-plane motion and the carried energy remains inside the structure avoiding scattering. The S0 mode also has more sensitivity to delaminations than the A0 mode (Wang and Yuan 2007). Nevertheless, the A0 mode has more resolution in order to detect smaller flaws, since the wavelength of the A0 mode is shorter than the others and the size defect detectability is commonly established at the same order of the wavelength of the propagating mode. The passing through of wave modes across a delamination produces a split in energy creating a new mode of propagation. This wave mechanism is called mode conversion and it also occurs when the wave reaches the edge of a plate, so new wave modes are created and reflected backwards. Mode conversion in delaminations has been studied in several investigations in order to take advantage of these changes and use them to detect and locate these defects (Su et al. 2007; Hu et al. 2008; Ramadas et al. 2009). Hu et al. (2008) analysed numerically the propagation of the S0 mode through a delamination. When the S0 mode enters in the delamination, a small amount of the energy of S0 (almost undetectable) is reflected backwards and most of it is transmitted forward, but also mode conversion is produced, so a new A0 mode is reflected and a new A0 mode is transmitted. The same mechanism occurs when the wave mode moves out of the delamination, the S0 and a new A0 are transmitted forward and a reflected S0 and a new A0 are transmitted backwards. In this case the reflected S0 mode has a greater amount of energy which enables the detection of the delamination in a pulse-echo configuration. So, in the publication, they are able to locate the end of the delamination calculating the propagating distance with the dispersion curves but they cannot determine the extent of the delamination which is highly important. Other detection techniques are based on a pitch-catch configuration, where the acquired signal is usually compared to a baseline signal from an undamaged condition. These techniques analyse the incoming wave packets and study their phase, amplitude and time of arrival establishing a damage index in order to compare different damage states (Giurgiutiu and Santoni-Bottai 2011; Torkamani et al. 2014). The use of this technique on its own is quite limited since only the path between transmitter and receiver is inspected. Thus, a network of transducers covering the structure has been performed by many researchers (Zhao et al. 2007; Lissenden and Rose 2008; Ng and Veidt 2009) in order to interrogate in a pitch-catch configuration the entire structure. With this technique, the system is able to map the inspected area by analysing all the paths between transducers. The paths affected by damages are highlighted facilitating the visual localization of the damage. Another interesting technique is to apply a data processing algorithm to a wave field image acquired by a laser vibrometer system (Michaels et al. 2011; Sohn et al. 2011; Rogge and Leckey 2013). In (Michaels et al. 2011), the authors use a signal processing technique in order to remove specific wave modes from the images in order to reveal low amplitude reflections from damages masked by high amplitude wave modes. To do this, the images are transformed to a frequency-wavenumber plane using the 2D Fourier Transform. In this domain, the different propagating wave modes are easily recognisable, so by applying a filter it is possible to remove a specific wave mode, and subsequently perform the inverse Fourier Transform to get the images without this mode. The disadvantage of this technique is that is not applicable to in-service structures, since the equipment to get the images is very sensitive to external vibrations so the acquisition has to be performed in very controlled conditions. Wavelet Transform is another signal processing technique widely used in guided wave technology, mainly in a pitch-catch configuration (Kessler et al. 2002; Yan and Yam 2002; Paget et al. 2003). In composite materials, it has been proved that it provides good detectability results.
Another important damage in composites that has been studied in the literature is the debonding, which is the separation between the shell and the core in a sandwich structure or between two parts joined by adhesive or co-curing. This kind of damage is structurally of great importance, since the debonding of a stiffener from the shell in a wing or the shear web from the spar in a wind turbine blade can cause a great loss of stiffness and a possible collapse of the entire structure. Investigations of this type of damage with guided waves follow a similar approach to the delamination detection. Since most of the studies are based on a transducer network in order to map the bonding area and locate the debonding by analysing the paths between transducers (Lissenden et al. 2009; Mustapha et al. 2012; Song et al. 2012; Ricci et al. 2014).
References
Alleyne DN, Cawley P (1992a) Optimization of Lamb wave inspection techniques. NDT&E Int 25:11–22
Alleyne DN, Cawley P (1992b) The interaction of Lamb waves with defects. IEEE Trans Ultrason Ferroelectr 39:381–397
Alleyne DN, Lowe M, Cawley P (1998) The reflection of guided waves from circumferential notches in pipes. J Appl Mech 65:635–641. doi:10.1115/1.2789105
Baid H, Schaal C, Samajder H et al (2015) Dispersion of Lamb waves in a honeycomb composite sandwich panel. Ultrasonics 56:409–416
Castaings M, Singh D, Viot P (2012) Sizing of impact damages in composite materials using ultrasonic guided waves. NDT&E Int 46:22–31
Cattin R (2012) Icing of wind turbines: Vindforsk projects, a survey of the development and research needs. In Reports. ELFORSK. Available via ELFORSK. http://elforsk.se/Rapporter/?download=report&rid=12_13_. Accessed 06 Apr 2016
Cawley P (1994) The rapid non-destructive inspection of large composite structures. Composites 25:351–357
Cawley P, Lowe M, Alleyne D et al (2003) Practical long range guided wave inspection applications to pipes and rail. Mater Eval 61:66–74
Ciang CC, Lee J-R, Bang H-J (2008) Structural health monitoring for a wind turbine system: a review of damage detection methods. Meas Sci Technol 19(12):2001
Claytor TN, Ammerman CN, Park G et al (2010) Structural damage identification in wind turbine blades using piezoelectric active sensing with ultrasonic validation. In Publications. Los Alamos National Laboratory. Available via LANL. http://permalink.lanl.gov/object/tr?what=info:lanl-repo/lareport/LA-UR-10-00416. Accessed 06 Apr 2016
Cotton I, Jenkins N, Pandiaraj K (2001) Lightning protection for wind turbine blades and bearings. Wind Energy 4:23–37
Chacon JLF, Andicoberry EA, Kappatos V et al (2014) Shaft angular misalignment detection using acoustic emission. Appl Acoust 85:12–22
Chacon JLF, Kappatos V, Balachandran W et al (2015) A novel approach for incipient defect detection in rolling bearings using acoustic emission technique. Appl Acoust 89:88–100
Choi K-S, Huh Y-H, Kwon I-B et al (2012) A tip deflection calculation method for a wind turbine blade using temperature compensated FBG sensors. Smart Mater Struct 21:025008
Debel C (2004) Identification of damage types in wind turbine blades tested to failure. In: Somers MAJ (ed) Materialeopførsel og skadesanalyse. DMS, Lyngby, pp 123–127
Deng Q, Yang Z (2011) Propagation of guided waves in bonded composite structures with tapered adhesive layer. Appl Math Model 35:5369–5381
Diamanti K, Soutis C (2010) Structural health monitoring techniques for aircraft composite structures. Prog Aerosp Sci 46:342–352
Discalea FL, Matt H, Bartoli I et al (2007) Health monitoring of UAV wing skin-to-spar joints using guided waves and macro fiber composite transducers. J Intell Mater Syst Struct 18:373–388
Ditri JJ, Rose JL (1992) Excitation of guided elastic wave modes in hollow cylinders by applied surface tractions. J Appl Phys 72:2589–2597
Gao H, Ali S, Lopez B (2010) Efficient detection of delamination in multilayered structures using ultrasonic guided wave EMATs. NDT&E Int 43:316–322
Giurgiutiu V, Santoni-Bottai G (2011) Structural health monitoring of composite structures with piezoelectric-wafer active sensors. AIAA J 49:565–581
Glavind L, Olesen IS, Skipper BF et al (2013) Fiber-optical grating sensors for wind turbine blades: a review. Opt Eng 52:030901
Grondel S, Paget C, Delebarre C et al (2002) Design of optimal configuration for generating A0 Lamb mode in a composite plate using piezoceramic transducers. J Acoust Soc Am 112:84–90
Habibi H, Cheng L, Zheng H et al (2015) A dual de-icing system for wind turbine blades combining high-power ultrasonic guided waves and low-frequency forced vibrations. Renew Energy 83:859–870
Han B-H, Yoon D-J, Huh Y-H et al (2014) Damage assessment of wind turbine blade under static loading test using acoustic emission. J Intell Mater Syst Struct 25:621–630
Han J, Kim C-G, Kim J-Y (2006) The propagation of Lamb waves in a laminated composite plate with a variable stepped thickness. Compos Struct 76:388–396
Hay TR, Wei L, Rose JL et al (2003) Rapid inspection of composite skin-honeycomb core structures with ultrasonic guided waves. J Compos Mater 37:929–939
Hayashi T, Kawashima K (2002) Multiple reflections of Lamb waves at a delamination. Ultrasonics 40:193–197
Hayashi T, Song W-J, Rose JL (2003) Guided wave dispersion curves for a bar with an arbitrary cross-section, a rod and rail example. Ultrasonics 41:175–183
Homola M (2005) Impacts and causes of icing on wind turbines. Available via Høgskolen i Narvik. http://ansatte.hin.no/mch/documents/Wind%20energy%20BSR-Impacts%20and%20causes%20of%20icing%20on%20wind%20turbines.pdf. Accessed 06 Apr 2016
Hu N, Shimomukai T, Yan C et al (2008) Identification of delamination position in cross-ply laminated composite beams using S0 Lamb mode. Compos Sci Technol 68:1548–1554
Kapadia A (2012) Best practice guide: non-destructive testing of composite materials. Composites UK. Available via National Composites Network. https://compositesuk.co.uk/system/files/documents/ndtofcomposites.pdf. Accessed 06 Apr 2016
Karmazin A, Kirillova E, Seemann W et al (2011) Investigation of Lamb elastic waves in anisotropic multilayered composites applying the Green’s matrix. Ultrasonics 51:17–28
Karmazin A, Kirillova E, Seemann W et al (2013) A study of time harmonic guided Lamb waves and their caustics in composite plates. Ultrasonics 53:283–293
Kessler SS, Spearing SM, Atalla MJ et al (2002) Damage detection in composite materials using frequency response methods. Compos Part B Eng 33:87–95
Kim H-I, Han J-H, Bang H-J (2014) Real-time deformed shape estimation of a wind turbine blade using distributed fiber Bragg grating sensors. Wind Energy 17:1455–1467
Kim S-W, Kang W-R, Jeong M-S et al (2013) Deflection estimation of a wind turbine blade using FBG sensors embedded in the blade bonding line. Smart Mater Struct 22:125004
Li D, Ho S-CM, Song G et al (2015a) A review of damage detection methods for wind turbine blades. Smart Mater Struct 24:033001
Li R, He D (2012) Rotational machine health monitoring and fault detection using EMD-based acoustic emission feature quantification. IEEE Trans Instrum Meas 61:990–1001
Li X, Yang Z, Zhang H et al (2015b) Crack growth sparse pursuit for wind turbine blade. Smart Mater Struct 24:015002
Lissenden C, Puthillath P, Rose J (2009) Guided wave feature identification for monitoring structural damage in joints between composite laminates. Mater Forum 33:279–285
Lissenden CJ, Rose JL (2008) Structural health monitoring of composite laminates through ultrasonic guided wave beam forming. In: Abstracts of the RTO Applied Vehicle Technology Panel (AVT) symposium, NATO, Montreal, 13–16 Oct 2008
Lowe MJ, Alleyne DN, Cawley P (1998) Defect detection in pipes using guided waves. Ultrasonics 36:147–154
Manohar A (2012) Quantitative nondestructive testing using infrared thermography. Dissertation, University of California
Márquez FPG, Tobias AM, Pérez JMP et al (2012) Condition monitoring of wind turbines: techniques and methods. Renew Energy 46:169–178
Michaels TE, Michaels JE, Ruzzene M (2011) Frequency-wavenumber domain analysis of guided wavefields. Ultrasonics 51:452–466
Moczo P, Robertsson JO, Eisner L (2007) The finite-difference time-domain method for modeling of seismic wave propagation. Adv Geophys 48:421–516
Monkhouse R, Wilcox P, Cawley P (1997) Flexible interdigital PVDF transducers for the generation of Lamb waves in structures. Ultrasonics 35:489–498
Mudge P, Harrison J (2001) TELETEST guided wave technology-case histories. Paper presented at nondestructive testing. In: 1st Middle East conference and exhibition, Bahrain, 24–26 September 2001
Mustapha S, Ye L, Wang D et al (2012) Debonding detection in composite sandwich structures based on guided waves. AIAA J 50:1697–1706
Nadella KS, Salas KI, Cesnik CES (2010) Characterization of guided-wave propagation in composite plates. In Kundu T (ed) Proceedings of the SPIE 7650, health monitoring of structural and biological systems, California, 2010
Nair A, Cai C (2010) Acoustic emission monitoring of bridges: review and case studies. Eng Struct 32:1704–1714
NDT Resource Center (2016) Theory - AE sources. https://www.nde-ed.org/EducationResources/CommunityCollege/Other%20Methods/AE/AE_Theory-Sources.htm. Accessed 25 Jan 2016
Ng CT, Veidt M (2009) A Lamb-wave-based technique for damage detection in composite laminates. Smart Mater Struct 18:074006
Niezrecki C, Avitabile P, Chen J et al (2014) Inspection and monitoring of wind turbine blade-embedded wave defects during fatigue testing. Struct Health Monit 13(6):629–643
Ostachowicz W, Güemes A (eds) (2013) New trends in structural health monitoring. Springer, Berlin
Paget CA, Grondel S, Levin K et al (2003) Damage assessment in composites by Lamb waves and wavelet coefficients. Smart Mater Struct 12:393
Pao Y-H, Gajewski RR, Ceranoglu AN (1979) Acoustic emission and transient waves in an elastic plate. J Acoust Soc Am 65:96–105
Park G, Rutherford AC, Wait JR et al (2005) High-frequency response functions for composite plate monitoring with ultrasonic validation. AIAA J 43:2431–2437
Pavlakovic B, Lowe M, Alleyne D et al (1997) Disperse: a general purpose program for creating dispersion curves. In: Thompson DO, Chimenti DE (eds) Review of progress in quantitative nondestructive evaluation, vol 16. Springer, Heidelberg, p 185
Pedrazzani JR, Castellucci M, Sang AK et al (2012) Fiber optic distributed strain sensing used to investigate the strain fields in a wind turbine blade and in a test coupon with open holes. In: Proceedings of the SAMPE technical conference, Charleston, 22–24 Oct 2012
Petcher P, Burrows SE, Dixon S (2014) Shear horizontal (SH) ultrasound wave propagation around smooth corners. Ultrasonics 54:997–1004
Ramadas C, Balasubramaniam K, Joshi M et al (2009) Interaction of the primary anti-symmetric Lamb mode (Ao) with symmetric delaminations: numerical and experimental studies. Smart Mater Struct 18:085011
Ramadas C, Padiyar J, Balasubramaniam K et al (2011) Lamb wave based ultrasonic imaging of interface delamination in a composite T-joint. NDT&E Int 44:523–530
Rauscher F (2004) Defect detection by acoustic emission examination of metallic pressure vessels. J Acoust Em 22:49–58
Rekatsinas C, Nastos C, Theodosiou T et al (2015) A time-domain high-order spectral finite element for the simulation of symmetric and anti-symmetric guided waves in laminated composite strips. Wave Motion 53:1–19
Requeson OR, Tcherniak D, Larsen GC (2015) Comparative study of OMA applied to experimental and simulated data from an operating Vestas V27 wind turbine. In: Abstracts of the international operational modal analysis conference, Gijón, 12–14 May 2015
Rhee S-H, Lee J-K, Lee J-J (2007) The group velocity variation of lamb wave in fiber reinforced composite plate. Ultrasonics 47:55–63
Ricci F, Mal AK, Monaco E et al (2014) Guided waves in layered plate with delaminations. In: Abstracts of the EWSHM-7th European workshop on structural health monitoring, Nantes, 8–11 July 2014
Rogge MD, Leckey CA (2013) Characterization of impact damage in composite laminates using guided wavefield imaging and local wavenumber domain analysis. Ultrasonics 53:1217–1226
Rose JL (2012) Health monitoring of composite structures using guided waves. In: The Defense Technical Information Center. Available via DTIC. http://www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA563790 Accessed 06 Apr 2016
Rose JL (2014) Ultrasonic guided waves in solid media. Cambridge University Press, New York
Rose JL, Avioli MJ, Mudge P et al (2004) Guided wave inspection potential of defects in rail. NDT&E Int 37:153–161
Saenger EH, Bohlen T (2004) Finite-difference modeling of viscoelastic and anisotropic wave propagation using the rotated staggered grid. Geophysics 69:583–591
Salawu O (1997) Detection of structural damage through changes in frequency: a review. Eng Struct 19:718–723
Sareen A, Sapre CA, Selig MS (2014) Effects of leading edge erosion on wind turbine blade performance. Wind Energy 17:1531–1542
Schulz M, Sundaresan M (2006) Smart sensor system for structural condition monitoring of wind turbines. In: National Renewable Energy Laboratory Documents. Available via NREL. http://www.nrel.gov/docs/fy06osti/40089.pdf. Accessed 06 Apr 2016
Shoja Chaeikar S, Berbyuk V, Boström A (2015) Investigating the application of guided wave propagation for ice detection on composite materials. In: Boltež M, Slavič J, Wiercigroch M (eds) Proceedings of the international conference on engineering vibration, Ljubljana, 2015
Sierra-Pérez J, Torres-Arredondo MA, Güemes A (2016) Damage and nonlinearities detection in wind turbine blades based on strain field pattern recognition. FBGs, OBR and strain gauges comparison. Compos Struct 135:156–166
Sohn H, Dutta D, Yang J et al (2011) Delamination detection in composites through guided wave field image processing. Compos Sci Technol 71:1250–1256
Sohn H, Park G, Wait JR et al (2004) Wavelet-based active sensing for delamination detection in composite structures. Smart Mater Struct 13:153
Song F, Huang G, Hu G (2012) Online guided wave-based debonding detection in honeycomb sandwich structures. AIAA J 50:284–293
Song F, Huang G, Hudson K (2009) Guided wave propagation in honeycomb sandwich structures using a piezoelectric actuator/sensor system. Smart Mater Struct 18:125007
Song G, Li H, Gajic B et al (2013) Wind turbine blade health monitoring with piezoceramic-based wireless sensor network. Int J Smart Nano Mater 4:150–166
Sørensen BF, Jørgensen E, Debel CP et al (2004) Improved design of large wind turbine blade of fibre composites based on studies of scale effects (Phase 1). Summary report. In: DTU Orbit~- The Research Information System Publications. Available via DTU Orbit. http://orbit.dtu.dk/fedora/objects/orbit:90493/datastreams/file_7702048/content. Accessed 06 Apr 2016
Su Z, Yang C, Pan N et al (2007) Assessment of delamination in composite beams using shear horizontal (SH) wave mode. Compos Sci Technol 67:244–251
Su Z, Ye L (2004) Lamb wave-based quantitative identification of delamination in CF/EP composite structures using artificial neural algorithm. Compos Struct 66:627–637
Su Z, Ye L (2009) Identification of damage using lamb waves: from fundamentals to applications. Springer, Heidelberg
Su Z, Ye L, Bu X (2002) A damage identification technique for CF/EP composite laminates using distributed piezoelectric transducers. Compos Struct 57:465–471
Sundaresan M, Pai P, Ghoshal A et al (2001) Methods of distributed sensing for health monitoring of composite material structures. Compos Part A Appl Sci Manuf 32:1357–1374
Tauchert TR, Guzelsu A (1972) An experimental study of dispersion of stress waves in a fiber-reinforced composite. J Appl Mech-T ASME 39:98–102. doi:10.1115/1.3422677
Taylor SG, Farinholt KM, Jeong H et al (2012) Wind turbine blade fatigue tests: lessons learned and application to SHM system development. In: The 6th European workshop on structural health monitoring – EWSHM. Available via NDT Net. http://www.ndt.net/article/ewshm2012/papers/we2b4.pdf. Accessed 06 Apr 2015
Taylor SG, Farinholt K, Choi M (2013a) Incipient crack detection in a composite wind turbine rotor blade. J Intell Mater Syst Struct 25(5):613–620. doi:10.1177/1045389X13510788
Taylor SG, Park G, Farinholt KM et al (2013b) Fatigue crack detection performance comparison in a composite wind turbine rotor blade. Struct Health Monit 12:252–262
Taylor SG, Park G, Farinholt KM et al (2013c) Diagnostics for piezoelectric transducers under cyclic loads deployed for structural health monitoring applications. Smart Mater Struct 22:025024
Torkamani S, Roy S, Barkey ME et al (2014) A novel damage index for damage identification using guided waves with application in laminated composites. Smart Mater Struct 23:095015
Ulriksen MD, Tcherniak D, Kirkegaard PH et al (2014) Operational modal analysis and wavelet transformation for damage identification in wind turbine blades. In: The 7th European workshop on structural health monitoring – EWSHM. Available via NDT Net. http://www.ndt.net/article/ewshm2014/papers/0210.pdf. Accessed 06 Apr 2016
Wang L, Yuan F (2007) Group velocity and characteristic wave curves of Lamb waves in composites: modeling and experiments. Compos Sci Technol 67:1370–1384
Wilcox P, Lowe M, Cawley P (2001) Mode and transducer selection for long range Lamb wave inspection. J Intell Mater Syst Struct 12:553–565
Wilcox PD (2003) A rapid signal processing technique to remove the effect of dispersion from guided wave signals. IEEE Trans Ultrason Ferroelectr 50:419–427
Yan Y, Yam L (2002) Online detection of crack damage in composite plates using embedded piezoelectric actuators/sensors and wavelet analysis. Compos Struct 58:29–38
Yang S, Tcherniak D, Allen MS (2014) Modal analysis of rotating wind turbine using multiblade coordinate transformation and harmonic power spectrum. In: De Clerck J (ed) Topics in modal analysis I: Proceedings of the 32nd IMAC, a conference and exposition on structural dynamics, Brescia, July 2012. Conference proceedings of the society for experimental mechanics series, vol 7. Springer, Heidelberg
Yeum CM, Sohn H, Ihn JB et al (2012) Instantaneous delamination detection in a composite plate using a dual piezoelectric transducer network. Compos Struct 94:3490–3499
Zak A, Krawczuk M, Ostachowicz W (2012) Spectral finite element method for propagation of guided elastic waves in wind turbine blades for SHM purposes. In: The 6th European workshop on structural health monitoring – EWSHM. Available via NDT Net. http://www.ndt.net/article/ewshm2012/papers/tu2d2.pdf. Accessed 06 Apr 2016
Zhao X, Gao H, Zhang G et al (2007) Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater Struct 16(4):1208–1217
Zhong C, Croxford A, Wilcox P (2015) Remote inspection system for impact damage in large composite structure. P Roy Soc Lond A Mat. doi:10.1098/rspa.2014.0631
Zhou W, Li Y, Li Z et al (2015) Interlaminar shear properties and acoustic emission monitoring of the delaminated composites for wind turbine blades. In: Shen G, Wu Z, Zhang J (eds) Advances in acoustic emission technology, vol 158, Springer proceedings in physics. Springer, Heidelberg, pp 557–566
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is distributed under the terms of the Creative Commons Attribution-NonCommercial 4.0 International License (http://creativecommons.org/licenses/by-nc/4.0/), which permits any noncommercial use, duplication, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the work’s Creative Commons license, unless indicated otherwise in the credit line; if such material is not included in the work’s Creative Commons license and the respective action is not permitted by statutory regulation, users will need to obtain permission from the license holder to duplicate, adapt or reproduce the material.
Copyright information
© 2016 The Author(s)
About this chapter
Cite this chapter
Hernandez Crespo, B. (2016). Damage Sensing in Blades. In: Ostachowicz, W., McGugan, M., Schröder-Hinrichs, JU., Luczak, M. (eds) MARE-WINT. Springer, Cham. https://doi.org/10.1007/978-3-319-39095-6_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-39095-6_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39094-9
Online ISBN: 978-3-319-39095-6
eBook Packages: EnergyEnergy (R0)