
Abstract
The multi-terminal VSC-HVDC grid is believed to be widely applied in the future power system. The dc line protection is the key technique for operation security and power supply reliability of the dc grid. In this paper, the single-ended protections, namely, the traveling-wave based protection and transient-variable based protection, as well as the pilot protections, mainly including the directional pilot protection and current differential protection, are discussed in detail. With the analyzed protections, the effective main and back-up protection strategy can be configured for the dc line in multi-terminal VSC-HVDC grid.
Similar content being viewed by others
1 Introduction
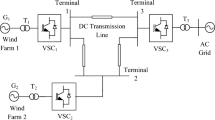
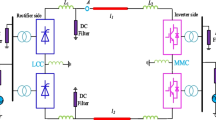
The voltage source converter (VSC) based HVDC system has outstanding advantages on the large-scale renewable power generation integration, inter-connection between the non-synchronous AC power systems, power supply for passive network and so on [1,2,3]. At present, the two-terminal VSC-HVDC system has been researched and practically applied widely. For higher power supply reliability, the multi-terminal VSC-HVDC grid, in which the dc lines are directly inter-connected via the dc bus, will be the developing trend of the VSC-HVDC technique [4, 5]. For example, in China, the Wudongde 800 kV three-terminal HVDC system and the Zhangbei 500 kV four-terminal DC Grid, as shown in Fig. 1, are both under design and construction [6, 7].

The typical topologies of the multi-terminal HVDC grids
However, it must be noted that, in the future multi-terminal VSC-HVDC grid, the overhead line will be widely applied to replace the dc cable [8], for the economic consideration. As we know, the fault probability on the overhead line is much higher than the dc cable. Therefore, the effective dc fault handling scheme must be configured for the dc grid.
Similar to the AC power system, the dc fault handling mainly includes the dc protection and dc fault isolation. After a dc fault, the dc protection should act quickly to identify the fault line, and then the corresponding DCCBs are tripped to cut off the fault line. But differently, the fault propagation speed in the dc grid is much faster compared with the AC system [9], so it requires the dc protection and dc fault isolation to act quickly in several milliseconds after the fault [5].
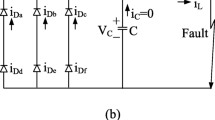
The dc fault isolation can be divided to two kinds of techniques, namely, the fault-current self-eliminating converter technique and the dc circuit breaker (DCCB) technique. The conventional half-bridge sub-module (HBSM) of the MMC does not have the fault current eliminating capability. So in recent years, the improved SM topologies, such as the full-bridge SM (FBSM), the clamp double SM, the three-level SM and so on [10,11,12], which have dc fault current eliminating capability, are proposed. Figure 2 (a) shows the working principle of the FBSM when eliminating the dc fault current. As Fig. 2 (a) showing, by turning off all the IGBTs in the FBSM, the capacitor is connected in the fault current path with reverse polarity, so the fault current can be eliminated to zero quickly. In Wudongde three-terminal HVDC system, the FBSMs are introduced to construct the hybrid converter with the HBSMs, for the Liubei Station and Longmen Station. Therefore, the dc fault current can be eliminated by blocking the converter. In addition, the DCCB is another promising dc fault isolation technique, because it can cut off the fault line with selectivity by cooperating with the selective protection [13]. Figure 2 (b) shows the typical topology of the hybrid DCCB, which is the most promising DCCB for VSC-HVDC grid. The hybrid DCCB consists of the parallel-connected bypass current path and main breaker. In Zhangbei four-terminal dc grid, the DCCBs are installed on each line terminal as shown in Fig. 1 (b).

The typical dc fault isolating methods
In this paper, another key technique of the dc fault handling, namely, the dc line protection, will be discussed in detail. In the multi-terminal VSC-HVDC grid, the protection for the transmission line should identify the fault line reliably and quickly. At present, the protection methods for the dc line in VSC-HVDC grid are mainly borrowed from the line protection in the LCC-HVDC system, including the traveling-wave based protection and the current differential protection. However, for using in the VSC-HVDC grid, the key properties of the traditional dc protection should be improved further, such as the acting speed, the capability against high transition resistance, and so on. Recently, novel (or improved) dc protection principles and schemes for VSC-HVDC grid have been proposed, which will be introduced detailedly in this paper.
This paper is organized as follows. In Section 2, the single-ended protections, including the traveling-wave based protection and transient-variable based protection are discussed. Their working principle and applicability in multi-terminal VSC-HVDC grid are introduced. Then the pilot protections, namely, the directional pilot protection and current differential protection, are discussed in Section 3. Finally, in Section 4, the conclusions of the paper are given.
2 The protection based on single-ended information
In the VSC-HVDC grid, the fault line is required to be identified as soon as possible. Therefore, the single-ended protection, which only uses the local signals, is applied as the main protection.
2.1 Traditional traveling-wave based protection
2.1.1 Traveling wave on the transmission line
Figure 3 shows the distributed parameter model of dc transmission line in frequency domain, where Zs, Zm, Ys and Ym respectively represent the series-connected self impedance, series-connected mutual impedance, parallel-connected self admittance, and parallel-connected mutual admittance of the unit-length line respectively.

The distributed parameter model of transmission line
According to Fig. 3, the wave equation in frequency domain can be obtained as
After decoupling calculation, eqs. (1) and (2) can be expressed as
where U0, U1 are the ground-mode and line-mode voltage, I0, I1 are the ground-mode and line-mode current. Then the solutions of (3) and (4) can be calculated as
where Zc0 = √(Zs + Zm)/(Ys + Ym), γ0 = √(Zs + Zm)·(Ys + Ym), Zc1 = √(Zs˗Zm)/(Ys˗Ym), γ1 = √(Zs˗Zm)·(Ys˗Ym).
According to (5) and (6), on the transmission line, the voltage and current both consist of the forward traveling wave and backward traveling wave. After the dc fault, the fault source generates a traveling wave, which moves as an electromagnetic wave. Moreover, at the initial stage of the fault, the traveling wave generated by the fault point is a backward traveling wave for the protection installed at the line terminals. Therefore, the traveling-wave based protection can detect the fault according to the change of the backward traveling wave.
2.1.2 Traveling-wave based protection in LCC-HVDC system
In the LCC-HVDC system, the filters and smoothing reactors are installed on the line terminals, which become the natural boundary for the propagation of traveling wave. Due to the attenuation caused by the boundary elements, the traveling wave after internal fault is much larger than that after external fault, which can be used to distinguish the internal and external faults.
According to the characteristics analyzed above, the ABB company proposed the traveling-wave based protection as follows [14]:
where P is defined as idcp·Zcp˗udcp for positive pole and idcn·Zcn˗udcn for negative pole. idcp, udcp and Zcp refer to the dc current, voltage and wave impedance of positive pole, while idcn, udcn and Zcn refer to the dc current, voltage and wave impedance of negative pole. G is defined as idc0·Zc0˗udc0, where Zc0 is the ground-mode wave impedance, and the ground-mode voltage udc0 = udcp + udcn. In theory, the ground-mode current idc0 can be calculated as idcp + idcn, similar to the ground-mode voltage. However, in the practical LCC-HVDC system, the filter is installed at each converter dc port. This means the ground-mode current fed by the converter consists of two parts, i.e., the current flowing between the pole line and the grounding line, and the current flowing from the filter to the ground. Under this condition, idcp + idcn only represents the current flowing between the pole line and the grounding line, which cannot reflect the complete ground-mode current. Therefore, in practical engineering, the ground-mode current idc0 is calculated as the sum of all the measured currents in the grounding system, instead of idcp + idcn. In addition, Δ1~Δ4 are the threshold value. Obviously, after the internal fault, the values of dP/dt and ΔP are larger than those after external fault, so the internal and external faults can be identified reliably with a suitable threshold value. In addition, the value of dG/dt and ΔG are different after different kinds of faults (positive pole-to-ground, negative pole-to-ground, pole-to-pole), which can be used to select the fault pole.
In some practical engineering, the single-ended protection for dc line is designed based on du/dt, Δu, and Δi directly, namely,
In (8), the criteria based on du/dt and Δu are used to identify the internal and external faults, while the criterion based on Δi is used to identify the fault direction. Actually, the characteristics of du/dt, Δu, and Δi are also caused by the propagation of the fault traveling wave. Therefore, it can be considered that the protection described as (8) also belongs to the traveling-wave based protection.
2.1.3 Application of traveling-wave based protection in the VSC-HVDC grid
As discussed above, in the LCC-HVDC system, the attenuation of the fault traveling wave caused by the boundary elements, such as the filter and the smoothing reactor, is used to identify the internal fault and external fault. In VSC-HVDC grid, the filters are absent, but the dc reactors are still installed on both terminals of each dc line. Therefore, the protection based on the boundary characteristics can still be applied.
As analyzed in Reference [15], the amplitude of the reactor voltage, under the internal fault condition, is larger than that under the forward external fault condition, due to the attenuation of the traveling wave caused by the reactor. So in [15], the amplitude of the reactor voltage is used to identify the internal fault and forward external fault. In addition, the first wave front of the reactor voltage is observed to identify the fault direction, because under the forward fault condition, the first front of the reactor voltage is positive, while it is negative under the backward fault condition.
Reference [16] proposed to use the change rate of the dc reactor voltage with pre-defined threshold values to detect the fault in multi-terminal HVDC grid, which has high acting speed, accuracy and robustness
Reference [17] analyzed the difference of the voltage and current between the internal fault and external fault. Then the voltage derivative, undervoltage and current derivative criteria are used to detect and discriminate the dc fault
In conclusion, the idea of using the characteristics caused by the line boundary can still be applied in the VSC-HVDC grid. And the acting speed of the traditional traveling-wave based protection is realizable to be increased to several-milliseconds level, satisfying the requirement of the VSC-HVDC grid. However, due to higher requirement on the acting reliability, the protection for the VSC-HVDC grid must have strong capability against high transition resistance. And it is a pity that the traditional traveling-wave based protections cannot reliably act under the high-transition-resistance fault condition, which is the core problem of the research on the protection in VSC-HVDC grid.
2.2 The protection based on single-ended transient information
As analyzed in [18], only the high-frequency components of the voltage can distinguish the internal fault from the external fault, especially for the high-transition-resistance fault condition. And at low frequency, the voltage component value under internal remote high-resistance fault condition may be smaller than that under the external nearby metallic fault condition. This is the essential reason why the traditional traveling-wave based protection, which uses the time-domain measured signals (namely full-band signals), cannot distinguish the internal weak fault from the external serious fault.
To improve the capability against high transition resistance, the transient-variable based protections are proposed [18,19,20]. The basic idea of transient-variable based protection is to extract the high-frequency transient components of the dc voltage or current, for identifying the internal fault and external fault. In general, the high-frequency transient component decays extremely fast in time domain. Therefore, the wavelet transform can be applied to extract the high-frequency transient component of the measured signals, because the wavelet transform has a good time-domain resolution at high-frequency range as shown in Fig. 4.

The time-domain and frequency-domain characteristic of the wavelet transform
In practical engineering, the Mallat wavelet transform algorithm is widely used, whose basic principle can be expressed as
where aj(k) and dj(k) are the approximation coefficient and detail coefficient at the level j. When j = 0, aj(k), namely, a0(k) refers to the measured discrete signal (dc voltage or current). In addition, h0 and h1 represent the low-pass and high-pass filter arrays respectively.
Then the transient voltage energy can be calculated to identify the internal and external faults, namely,
where Ej = (max|dj(k)|)2. And Eset is the threshold value of the transient voltage energy. The value of Eset should be larger than the largest value of Ej which may occur under the external fault conditions, and smaller than the smallest value of Ej which may occur under the internal fault conditions. Generally, this value is determined according to the simulation.
The transient-variable based protection can act in several milliseconds after the fault [18, 20]. Moreover, compared with the traditional traveling-wave based protections, it has stronger capability against high-transition resistance, thus being more suitable for VSC-HVDC grid, which can be used as the main protection for the dc line.
3 The pilot protection
In dc grid, the single-ended protection requires no communication, thus having higher acting speed and generally being used as the main protection. For higher reliability, the back-up protection for dc line is also needed. It should be pointed out that, in dc grid, the main and back-up concept mainly refers to the time aspect, not the space aspect. In dc grid, the pilot protections based on the communication, such as the directional pilot protection and current differential protection, are suggested to be used as the back-up protection.
3.1 The directional pilot protection
3.1.1 Traditional direction criteria based on change value of current or based on current derivative
Obviously, the fast and reliable direction criterion is the key technique for the directional pilot protection. And in dc system, the traditional direction criteria are based on the change value of current or current derivative.
The direction criterion based on the change value of dc current identifies the fault as forward when the change value of dc current increases to exceed a positive threshold value [21]. To avoid the influence of system disturbance, such as the system oscillation, the threshold value cannot be too small. However, after the forward fault with high transition resistance, the dc fault current may be very small, which means the criterion cannot identify it as forward correctly.
The current derivative based direction criterion identifies the fault as forward when the value of dc current derivative is larger than zero or a positive threshold value [17]. But due to the distributed capacitors of the transmission line, the dc current derivative oscillates between positive and negative values [18], whether in the case of forward or backward faults. It means the criterion may identify the backward fault as forward by mistake. Therefore, the novel direction criterion with higher reliability still needs to be researched.
3.1.2 The direction criterion based on the boundary characteristic
Similar to the single-ended protection, the boundary characteristics can be used to identify the fault direction. As analyzed in [18], under the forward fault condition as shown in Fig. 5 (a), the high-frequency transient voltage at the line side of dc reactor is larger than that at the bus side. On the contrary, under the backward fault condition as shown in Fig. 5 (b), the high-frequency transient voltage at the line side of dc reactor is smaller than that at the bus side. Moreover, the higher the frequency of the extracted components is, the more obvious the above characteristic will be.

The frequency-domain fault superposition equivalent circuits of forward and backward faults
Therefore, reference [18] proposed to identify the fault direction according to the ratio between the reactor line-side transient voltage and bus-side transient voltage. The detailed criterion can be expressed as
where dj_line(k) represents the detail coefficient of the reactor-line-side dc voltage at the level j, while dj_bus(k) represents the detail coefficient of the reactor-bus-side dc voltage at the level j. In addition, kset is the reliability coefficient. Generally, it is set to be slightly bigger than 1.
Compared with the traditional direction criteria, the characteristic used in the proposed criterion considers the line distributed parameter characteristics. So the corresponding negative influence can be avoided, and the proposed criterion has higher acting reliability. In addition, the high-frequency transient component of the voltage is extracted for the criterion, leading to a stronger capability against high transition resistance.
However, it should be pointed out that, in some multi-terminal HVDC grid, the reactor may be not installed on the line terminals. For example, the Wudongde three-terminal HVDC system shown as Fig. 1, only installs the dc reactors at the converter dc ports, and there are no dc reactors on the dc line terminals. Under this condition, the boundary characteristic is absent, and the criterion not based on the boundary should be researched.
3.1.3 The traveling-wave based direction criterion
For the condition without line boundary elements, the traveling-wave based direction criterion has a good applicability [22]. Figure 6 shows the propagating characteristics of the voltage traveling wave under forward fault and backward fault conditions (taking the protection M for instance). After the forward fault as shown in Fig. 6 (a), during the time period t0~t0 + 2 l2/v (t0 is the time when the initial fault traveling wave arrives, and v represents the propagating speed of the traveling wave), the forward traveling wave ΔuM+ and backward traveling wave ΔuM˗ at M satisfy

The Bewley-lattice diagram of the forward fault and backward fault
where kr refers to the reflection coefficient at the line terminal, which is generally smaller than 1.
Differently after the backward fault (for protection M) as shown in Fig. 6 (b), during the time period t0~t0 + 2 l1/v, the traveling waves ΔuM+ and ΔuM˗ satisfy
According to the analysis above, it can be concluded that, during the time period t0~t0 + min (2 l1/v, 2l2/v) after a fault, the ratio k of forward and backward traveling waves is smaller than 1 under the forward fault condition, while much larger than 1 under the backward fault condition. This characteristic is the theoretical basis for the traveling-wave based direction criterion, which can be expressed as
where kset is the threshold value, which is set as 1~2 generally.
According to the theoretical analysis, the above criterion is reliable only during t0~t0 + min (2 l1/v, 2l2/v). In VSC-HVDC grid, the length of the dc transmission line is about hundreds of kilometers. It means only the data in the initial several-milliseconds time window after being quickly started can be used by the criterion. For the existing dc protection hardware platform, it is easy to capture the data in this time window. So the traveling-wave based direction criterion is feasible in the dc grid. And this character is exactly in accordance with the requirement of the VSC-HVDC system on the acting speed of dc protection. In addition, in Fig. 6, although the traveling-wave based direction criterion is discussed in a three-terminal dc system, it is also suitable for other dc systems with different topologies, such as the point-to-point topology and the meshed topology.
However, it should be noted that, in dc grid, the fault traveling wave contains different frequencies components, but in (14), only a certain line parameter (referring to the wave impedance) can be used. It means the frequency-dependent characteristic of the transmission line will cause the calculated traveling wave to be not equal to the actual traveling wave. Therefore, the acting reliability and sensitivity of the criterion are reduced drastically. In other words, for application in the dc grid, the improved method, which can avoid the negative influence of the line parameter frequency-dependent characteristic, should be researched.
3.2 The current differential protection
3.2.1 The traditional current differential protection in LCC-HVDC system
In the LCC-HVDC system, the current differential protection is applied as the back-up protection for dc line, which is expressed as
where the differential current idiff is directly calculated as the sum of the measured currents at two terminals of the line (the directions of the measured currents are both set as bus-to-line).
During system normal operation or external fault, the current flows through the whole line, so idiff is equal to zero in theory (neglecting the current of the line distributed capacitors). On the contrary, after the internal fault, idiff increases to exceed the threshold value quickly because both the two terminal currents flow toward the fault point. Therefore, the internal and external faults can be distinguished according to idiff quickly. The current differential protection can reliably act even under high-resistance fault condition, thus being used as the back-up protection for dc line in LCC-HVDC system.
Nevertheless, in HVDC system, the dc transmission line is very long (hundreds of kilometers at least), and a large line-distributed-capacitor current will occur during any transient process, such as the external fault, converter start-up and so on. In another word, due to the influence of the line distributed capacitor, the differential current idiff may also be larger than the threshold value even not under the internal fault condition, resulting in the protection mal-operation. To avoid this negative influence, a long time delay (Tset), which is hundreds-of-milliseconds level, is introduced as shown in (15) [23]. It leads the current differential protection to require a long acting time. Obviously, this acting speed (hundreds-of-milliseconds level) cannot be accepted in the VSC-HVDC system.
3.2.2 The current differential protection based on Bergeron model
The Bergeron model of transmission line reflect the distributed characteristic of the line parameter, so the current differential protection based on Bergeron model can avoid the influence of distributed capacitor significantly [24].
Figure 7 (a) shows the Bergeron model of the single lossless transmission line. According to the solution of the lossless transmission line equation, the relationship between the currents and voltages of terminal j and k, namely, ij(t), ik(t), uj(t) and uk(t) satisfy

Bergeron model of the single transmission line
where Zc is the wave impedance of the line. Ijk(t˗τ) and Ikj(t˗τ) are the equivalent current sources, which reflect the traveling wave from the opposite terminal.
Based on the lossless model, the lumped resistors can be introduced to reflect the power loss on the line distributed resistors. In general, the transmission line can be divided to two lines, and the averagely divided lumped resistors are connected in series with the line terminals, as shown in Fig. 7 (b). According to the practical experience, the calculation result is accurate enough with the above equivalence. Therefore, the relationship between ij(t), ik(t), uj(t) and uk(t) considering the line power loss can be derived according to Fig. 7 (a) and (b). For example, the current ij(t) can be expressed as
Based on (17), the current at any position of the line can be calculated according to the terminal current and voltage. And the basic idea of the current differential protection based on Bergeron model can be described as
where Iset2 is the threshold value, which is set to be larger than the maximum unbalanced current, including the maximum differential current may occur after external faults, and the maximum differential current may occur on the healthy pole after pole-to-ground fault. ikr is the current at the selected reference point r, which is calculated by the current and voltage at terminal k according to (17). And ijr is the current at the selected point r, which is calculated by the current and voltage at terminal j, as shown in Fig. 8.

The schematic diagram of the reference point
Obviously, under normal operation or external fault conditions, the line is a complete Bergeron model, so the current (ijr) calculated from the terminal j is equal to the current (ikr) calculated from the terminal k. And idiff is equal to zero. Differently, if a fault occurs on the line, the line is divided to two Bergeron models by the fault point. So ijr is not equal to ikr anymore. It means idiff will not be equal to zero anymore. In fact, according to the further analysis, after internal fault, the value of idiff is highly related to the current (if) flowing to the fault point. In addition, it should be noted that, to eliminate the coupling effect between the positive and negative poles, the above calculated should be carried out after being decoupled, and then the differential currents of each pole line can be obtained by inverse transformation from the mode variables.
According to the above analysis, the Bergeron model reflects the line distributed capacitor characteristic, so the current differential protection based on Bergeron model can avoid the influence of the distributed capacitors completely, and the time delay in (15) can be cancelled, which means the acting speed is increased significantly.
However, the Bergeron model has fixed distributed parameters, which does not consider the frequency-dependent characteristics of the line parameters. After a dc fault, the fault current and voltage contain various frequencies components. Therefore, the time-domain calculation based on the fixed line parameters will lead to a non-negligible error [25]. To improve the acting reliability of the protection, the improved algorithm, which can avoid the influence of the line parameter frequency-dependent characteristic, needs to be researched.
In addition, it should be pointed out that, for the dc line protection in dc grid, the main and back-up concept refers to the time aspect, not the space aspect. In fact, the pilot protections can also protect the whole line. In some practical projects, the line boundary elements may be absent, leading the single-ended protection to be ineffective. Under this condition, the pilot protections, which are not based on the boundary characteristics, can be considered as the main protection. Due to the communication delay, the acting speed of the pilot protection is slower than the single-ended protection. Therefore, the fault current limiting method with stronger current limiting capability must be configured for the system, to limit the fault current fast increasing and reduce the requirement on the acting speed of the protection.
4 Conclusions
The dc protection is the key technique for operation security and power supply reliability of the multi-terminal VSC-HVDC grid. At present, different kinds of dc protections have been researched.
(1) The traveling-wave based protection (single-ended) can still be used in the VSC-HVDC grid, due to the existence of the dc reactor on both terminals of each line. However, its capability against high transition resistance still needs to be improved.
(2) The transient protection uses high-frequency components of the voltage (or current) to identify the internal and external faults, thus having stronger capability against high transition resistance. Moreover, its acting speed is fast enough for VSC-HVDC grid, thus can be used as the main protection.
(3) The directional pilot protection or current differential protection is suggested to be used as the back-up protection for dc line in the multi-terminal VSC-HVDC grid. However, for enough acting reliability, the improved schemes still need to be researched for both the directional pilot protection (traveling-wave based) and current differential protection, to avoid the negative influence of the transmission line parameter frequency-dependent characteristic.
(4) Generally, in the multi-terminal VSC-HVDC grid, the single-ended protection is suggested to be used as the main protection, while the pilot protection to be used as the back-up one. Differently, under the condition when the single-ended protection is ineffective, the pilot protections, which are not based on the boundary characteristics, can be considered as the main protection. But the dc fault current limiting method with stronger limiting capability must be configured.
Availability of data and materials
Not applicable.
References
Ooi, B. T., & Wang, X. (1991). Boost type PWM HVDC transmission system [J]. IEEE Transactions on Power Delivery, 6(4), 1557–1563.
Flourentzou, N., Agelidis, V. G., & Demetriades, G. D. (2009). VSC-based HVDC power transmission systems: An overview [J]. IEEE Trans Power Electron, 24(3), 592–602.
Lesnicar, A., & Marquardt, R. (2003). An innovative modular multilevel converter topology suitable for a wide power range [C]. Bologna, Italy: In IEEE Power Tech. Conf.
Rahman, M. H., Xu, L., & Yao, L. Z. (2016). Protection of large partitioned MTDC networks using DC-DC converters and circuit breakers [J]. Protection and Control of Modern Power Systems, 1(2).
He, J. W., Li, B., & Li, Y. (2018). Analysis of the fault current limiting requirement and design of the bridge-type FCL in the multi-terminal DC grid [J]. IET Power Electron, 11(6), 968–976.
Yang, Y., Lin, Y., Xu, W., & Zuo, Z. M. (2017). Influence of Wudongde multi-terminal HVDC on security and stability of Guangdong power grid [J]. Guangdong Electric Power, 30(11), 44–50.
Tang, G. F., Pang, H., He, Z. Y., & Wei, X. G. (2018). Research on key technology and equipment for Zhangbei 500kV DC grid [C]. In 2018 international power electronics conference (pp. 2343–2351). Japan: Niigata.
Li, X. Q., Song, Q., Liu, W. H., Rao, H., et al. (2013). Protection of nonpermanent faults on DC overhead lines in MMC-based HVDC systems [J]. IEEE Transactions on Power Delivery, 28(1), 483–490.
Li, B., He, J. W., Tian, J., et al. (2017). DC fault analysis for modular multilevel converter-based system [J]. Journal of Modern Power Systems and Clean Energy, 5(2), 275–282.
Marquardt, R. (2011). Modular multilevel converter topologies with DC-short circuit current limitation [C]. In 8th Int. Conf. Power Electron (pp. 1425–1431). ECCE Asia.
Zhang, J., & Zhao, C. (2015). The research of SM topology with DC fault tolerance in MMC-HVDC [J]. IEEE Transactions on Power Delivery, 30(3), 1561–1568.
Li, R., Fletcher, J. E., Xu, L., Holliday, D., & Williams, B. W. (2015). A hybrid modular multilevel converter with novel three-level cells for DC fault blocking capability [J]. IEEE Transactions on Power Delivery, 30(4), 2017–2026.
Hassanpoor, A., Hafner, J., & Jacobson, B. (2015). Technical assessment of load commutation switch in hybrid HVDC breaker [J]. IEEE Transactions Power Electronic, 30(10), 5393–5400.
Zheng, W., Zhang, N., & Yang, G. Y. (2015). Comparative and improvement investigation on the DC transmission line traveling wave protections of Siemens and ABB [J]. Power System Protection and Control, 43(24), 149–154.
Descloux, J., Raison, B., & Curis, J.-B. (2014). Protection algorithm based on differential voltage measurement for MTDC grids [C]. In In 12th IET International Conference on Developments in Power System Protection (DPSP 2014), Copenhagen, Denmark (pp. 1–5).
Li, R., Xu, L., & Yao, L. Z. (2017). DC fault detection and location in meshed multiterminal HVDC systems based on DC reactor voltage change rate [J]. IEEE Transactions on Power Delivery, 32(3), 1516–1526.
Leterme, W., Beerten, J., & Hertem, D. V. (2016). Nonunit protection of HVDC grids with inductive DC cable termination [J]. IEEE Transactions on Power Delivery, 31(2), 820–828.
Li, B., Li, Y., He, J. W., & Wen, W. J. A novel single-ended transient-voltage-based protection strategy for flexible DC grid [J]. IEEE Transactions on Power Delivery. Early Access. https://doi.org/10.1109/TPWRD.2019.2910390.
Liu, J., Tai, N. L., & Fan, C. J. (2017). Transient-voltage-based protection scheme for DC line faults in the multiterminal VSC-HVDC system [J]. IEEE Transactions on Power Delivery, 32(3), 1483–1494.
Xiang, W., Yang, S. Z., Xu, L., et al. (2019). A transient voltage-based DC fault line protection scheme for MMC-based DC grid embedding DC breakers [J]. IEEE Transactions on Power Delivery, 34(1), 334–345.
Epameinondas Kontos, Rodrigo Teixeira Pinto, Pavol Bauer. (2013). Control and protection of VSC-based multi-terminal DC networks [N]. LAP LAMBERT Academic Publishing, ISBN: 978-3659486630.
Li, Z., Zou, G. B., Tong, B. B., et al. (2015). Novel traveling wave protection method for high voltage DC transmission line [C] (pp. 1–5). Denver, USA: In IEEE Power &Energy Society General Meeting.
Zhou, H. Y., Yu, J., Huang, J. Y., et al. (2008). Issues over DC line differential protection [J]. Southern Power System Technology, 2(3), 17–21.
Li, B., Chang, W. H., He, J. L., & Bo, Z. Q. (2009). Special problems in current differential protection based on Bergeron model [C] (pp. 1–4). Wuhan, China: Asia-Pacific Power and Energy Engineering Conference.
Song, G. B., Cai, X. L., Gao, S. P., et al. (2011). Novel current differential protection principle of VSC-HVDC considering frequency-dependent characteristic of cable line [J]. Proceedings of the CSEE, 31(22), 105–111.
Acknowledgements
Not applicable.
Funding
This work was supported by the National Natural Science Foundation of China (No. U1866205).
Author information
Authors and Affiliations
Contributions
B. Li, as the first author, contributed significantly to analysis and research of the paper, J. W. He, as the corresponding author, contributed significantly to the research, writing and submission of the paper. Y. Li and B. T. Li also helped to improve the paper quality. All the authors read and approved the submitted manuscript.
Authors’ information
B. Li, J. W. He, Y. Li and B. T. Li are all with the School of Electrical and Information Engineering, Tianjin University, Tianjin, China.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, B., He, J., Li, Y. et al. A review of the protection for the multi-terminal VSC-HVDC grid. Prot Control Mod Power Syst 4, 21 (2019). https://doi.org/10.1186/s41601-019-0136-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s41601-019-0136-2