
Abstract
Background
Recent declines of honeybees and simplifications of wild bee communities, at least partly attributed to changes of agricultural landscapes, have worried both the public and the scientific community. To understand how wild and managed bees respond to landscape structure it is essential to investigate their spatial use of foraging habitats. However, such studies are challenging since the foraging behaviour of bees differs between species and can be highly dynamic. Consequently, the necessary data collection is laborious using conventional methods and there is a need for novel methods that allow for automated and continuous monitoring of bees. In this work, we deployed an entomological lidar in a homogenous white clover seed crop and profiled the activity of honeybees and other ambient insects in relation to a cluster of beehives.
Results
In total, 566,609 insect observations were recorded by the lidar. The total measured range distribution was separated into three groups, out of which two were centered around the beehives and considered to be honeybees, while the remaining group was considered to be wild insects. The validity of this model in separating honeybees from wild insects was verified by the average wing modulation frequency spectra in the dominating range interval for each group. The temporal variation in measured activity of the assumed honeybee observations was well correlated with honeybee activity indirectly estimated using hive scales as well as directly observed using transect counts.
Additional insight regarding the three-dimensional distribution of bees close to the hive was provided by alternating the beam between two heights, revealing a “funnel like” distribution around the beehives, widening with height.
Conclusions
We demonstrate how lidar can record very high numbers of insects during a short time period. In this work, a spatial model, derived from the detection limit of the lidar and two Gaussian distributions of honeybees centered around their hives was sufficient to reproduce the observations of honeybees and background insects. This methodology can in the future provide valuable new information on how external factors influence pollination services and foraging habitat selection and range of both managed bees and wild pollinators.
Similar content being viewed by others
Background, motivation and aim
The decline of insect numbers in recent years has worried both researchers and the public [1]. Pollinators and in particular bees and hoverflies provide essential services in terms of pollination of wild plants [2] and crops [3]. Honeybees provide a large part of the pollination of crops, but wild pollinators are also quantitatively important crop pollinators [4] and are essential for wild plant pollination [5]. Accordingly, recent declines of honeybees [6] and simplifications of wild bee communities [7], has caused considerable concern [8]. The decline of wild pollinators has been attributed to a multitude of factors, such as landscape simplification causing loss of foraging and nesting habitat, increased use of pesticides, spread of diseases and potentially also direct competition with managed pollinators [8, 9]. The decline of managed bees is instead mostly related to socio-economic factors, including lack of profitability of bee keeping [10], which may, however, be related to landscape structure [11].
To generate a mechanistic understanding of how both wild pollinators and honeybees respond to landscape change and to monitor the pollination services they provide, it is essential to investigate their spatial use of foraging habitats. Bees are central place foragers, that have to find food for their offspring in the vicinity of their nests [12, 13]. For wild bees, a major reason for their decline is thought to be a loss of a continuous forage supply across the season and sufficiently close to the nest [14]. However, since bee species differ in their foraging ranges, the consequences of landscape simplification may be species dependent [15,16,17]. Similarly, the benefit of managing honeybees may depend on the forage landscape surrounding hives [11], with consequences for the interest of bee keepers to manage hives for honey production. Finally, honeybees and wild pollinators may to a smaller or larger extent share flower resources,, suggesting that they may compete [18, 19]. The scope and consequence of competition may depend on their foraging ranges [20], for example whether or not wide-ranging species such as honeybees are able to outcompete less mobile species in simplified landscapes [21]. Knowledge about the use of foraging habitat and mobility of bees is, therefore, essential when designing mitigation measures to counteract ongoing pollinator declines, e.g., to safeguard crop pollination.
Although knowledge of habitat selection and foraging ranges of bees is essential, there is a lack of information on how it varies between species, landscape types and over time. The major reason for this is that studies of habitat use and foraging movements are challenging. For example, their foraging may show spatio-temporal dynamics [22,23,24] that can differ between species [25, 26], resulting in a requirement of extensive data to describe their use of foraging habitat. Conventional methods to determine habitat use, such as pan-traps, fail to produce fine time-resolved data and may result in bias because of bees being attracted to the traps [27]. Other methods, such as Pollard walks, require considerable resources and may produce data that are so scarce that they need to be pooled over space or time for analyses [28]. Hence, there is a need for methods that allow for time-continuous monitoring of bees and can accurately resolve different taxonomic groups.
Detection of insects with radar was demonstrated as early as 1949 [28] and entomological use of radar has since been considerably refined [29, 30]. It has in particular been applied to monitor large insects, such as moths and locust, migrating at heights of hundreds of meters. Using existing weather radar infrastructure, large amounts of data can be made accessible for radar entomology [31, 32]. The monitoring of foraging insects close over the ground is challenged by ground clutter noise but harmonic radar systems [33, 34], where a nonlinear diode is glued to the insects, can track individual insects at low altitudes [35]. However, the technology is limited to monitoring insects strong enough to carry the antenna and is unsuitable for monitoring large numbers of insects.
Inspired by progress in entomological radar and early entomological lidar [36, 37], lidar entomology has evolved [38] and overcomes many of the challenges for remote monitoring of insects near the ground. Lasers and the shorter wavelengths used in lidar allow for increased sensitivity and superior beam control in terms of collimation and side lobes. This makes it possible to use lidar in cluttered environments, e.g., embedded in forest vegetation [39], or just above ground in agricultural fields [40, 41]. In recent years, it has been used in several applications due to its capability of recording large number of observations in short time [40, 42, 43]. Lidars can provide sufficient statistics of insect activity within minutes and the retrieval of modulation properties provide some discrimination between groups, although not yet to species level [43]. Lidar instrumentation has earlier been used to monitor honeybees [44] but to date there are no studies attempting to capture the whole foraging range throughout the day.
To evaluate the feasibility to monitor honeybee activity separately from the activity of other insects, we set up an entomological Scheimpflug lidar [45] to monitor the honeybee activity in a pollinator-dependent crop, white clover for seed production (Trifolium repens L.). In addition to the lidar measurements, the activity of honeybees was measured using modified Pollard walks [46] and hive scales, measuring the weight of the hives over time. In this paper, we aim to show the ability to distinguish between honeybee and general insect activity using a spatial model rather than individual classification of each insect observation.
Materials and methods
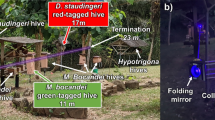
An entomological kHz lidar was used to monitor the honeybee and insect activity in a 755 m transect over a white clover field for seed production in Denmark on 4. to 6. July 2017. The field contained 6 clusters with ca 20 beehives each for pollination services, as shown in Fig. 1. For ground truthing, Pollard walks and hive scales were used to monitor the honeybee activity. The measurements were carried out from 11:20 to 20:35 on 4 July, from 08:50 to 20:15 on 5 July and 09:00–15:00 on 6 July (local summertime).

Schematic of the field and experiment layout. The lidar beam passed ca 2 m from the beehives, ca 1.5 m above the ground. Satellite image from Google Earth
Study site
The study site was a 300*1000 m white clover field located on the island of Lolland, Denmark (54°46′ 15.7″ N 11°36′ 25.5″ E). This site was selected for its flatness. The field was surrounded by hedges along the long sides and a small deciduous forest in the far end (Fig. 1). Within the field, there were two flower strips with a mix of lacy phacelia (Phacelia tanacetifolia) and buckwheat (Fagopyrum esculentum) to attract and support insects. The white clover crop was established with an even plant density resulting in 1331 flowerheads per m2 (average of six samples 12.5 × 50 cm). At the time of the experiment, the white clover was in full bloom. On the eastern side, a wheel track ran along the field. The surrounding area contained agricultural fields and small forests.
Lidar instrumentation
The lidar instrument was purchased from Norsk Elektro Optikk AS, Norway. It resembles the ones earlier described in [40, 47, 48]. Briefly, in this study, the light from a 3 W 808 nm laser diode was expanded using a beam expander with 500 mm focal length and 102 mm aperture. The emitted light was focused on a neoprene covered termination board at 755 m and a tree at 1000 m distance (Fig. 1). The back-scattered light from insects entering the beam was collected by a Newtonian telescope with 200 mm aperture and 800 mm focal length. To reduce the amount of background light in the system, the collected light was filtered by a 3 nm wide bandpass filter. The filtered light was recorded by a 2048-pixel (14 × 200 µm pixel size) silicon line scan camera mounted according to the Scheimpflug principle at 45° angle. The optical instrumentation was mounted on a tripod and protected from weather by a 3 × 3 m tent. Power was supplied by a mains connection from a residential house at the field border.
The laser beam was aimed ca. 2 m west of the south-eastern beehive cluster ca 180 m along the beam (Fig. 1). On 6 July, the height of the beam was alternated in height between the termination plate and a tree at 1000 m every 15 min to profile the activity at two heights. The beam height above ground was measured on site at 15 locations along the transect and varied from ca 0.5 m close to the lidar to 2.5 m at the highest point for the lower beam. These measurements where combined with open source terrain data available from the Danish elevation model [49] and a linear model was used to interpolate the beam’s height above the terrain along the full transect.
Data processing
The lidar recorded 35 000, 16-bit exposures at 3.5 kHz into a file of 10 s duration. The laser was synchronously modulated with the 3.5 kHz sampling frequency such that every second exposure was taken with the laser turned off. Between each file, there is an average gap of ~ 1 s due to data transfer which yields an average temporal fill-factor of ~ 90%. As in previous work [48], the frames, recorded when the laser is off, are subtracted from the frames recorded with the laser turned on yielding synchronized lock-in detection. This detection scheme allows the lidar to record insect echoes during daytime by removing the influence of background illumination and yields a time-range map, as exemplified in Fig. 2. Subsequently, the 10 s median intensity at each pixel is subtracted to remove static signals from atmospheric backscattering.

a Lidar raw data example. The time-range map reveals a large number of insect observations by the beehives at 180 m. At the top of the image, the static echo from the termination is visible as a continuous line at 755 m. The signal intensity over range is shown in the vertical plot to the left with maximum, median and interquartile range (IQR) signals in orange, blue and green. Likewise, the signal over time (up to 700 m) is shown in the horizontal plot at the bottom. b Cut out showing an insect observation, where the wingbeats are visible as vertical stripes
The Scheimpflug ranging principle is based on triangulation and thus the pixel number corresponds tangentially to the range [50,51,52,53,54]. Insect observations, as the one shown in Fig. 2b, were automatically extracted from the raw data using a slightly adapted version of the algorithm described in detail in [48]. An insect observation is defined as a sequence of above-threshold signals produced when an insect transits the beam. Each observation thus consists of a single insect trajectory through the beam. In total over 3 days, 566 609 individual insect observations were recorded by the lidar during a total measurement time of 23 h and 15 min.
Ground truthing
Two 45 m modified Pollard walks were conducted every hour at two different transects ca 150 m from the beehives, as shown in Fig. 1 [46]. The first was a 100 cm wide area between two wheel tracks for field operations in the white clover. The second was a 150 cm wide flower strip with phacelia and buckwheat. The transect walks were conducted by various operators at the site, in total, 5 different persons, counting all honey- and bumblebees foraging, resting or flying between the wheel tracks or within the flower strip. Due to a limited number of bumblebees observed (< 50 in total), we only used honeybee counts in the further analyses. On average, ca 40 bees were observed by each observer and Pollard walk and in total, 5730 honeybee observations were made.
Two of the beehives were remotely monitored by the beekeeper and the weight was logged every second hour. The change in weight over the course of the day is determined by the number of bees in the hive as well as the amount of collected pollen and nectar. We assume that all bees are inside the hives at midnight, thus representing the total weight of bees and the hive, Wtot. By linearly interpolating the change in hive weight from midnight to midnight, we can then, for every two hours, subtract the measured “hive weight”, \({W}_{Hive}\), which is removed from each weight measurement:
\(\mathrm{where} {W}_{Bee}\) represents the lost weight of the bees in the hive when they are out foraging, assumed to be directly correlated to the number of bees in the hive and, therefore, negatively correlated to the flight activity. This weight loss will of course also be affected by the amount of pollen and nectar collected and consumed between each 2-h sample, this is ignored in our model.
Weather data was collected by a small weather station with 30-min resolution monitoring temperature, humidity, air pressure, wind speed and wind direction. In general, the weather was stable with temperatures between 15 and 25 degrees Celsius, varying sun and cloud coverage and low winds during the entire measurement period.
Measurement results and data analysis
The distribution of insect recordings over time and range is shown in Fig. 3. Half of the observations were recorded within 11 m of the beehives. The maximum activity recorded by the lidar was reached between 14:45 and 15:00 with a total of 10 807 insect observations along the whole transect and 26 insect observations per meter and minute.

Time-range map of insect activity during the second measurement day. Insect counts per minute and 1 m of transect evaluated in 15 min, 2 m bins. By the beehives at 180 m, the activity is 30 times higher than in the surrounding area. More activity is recorded closer to the lidar, since the sensitivity decreases with range. The maximum activity is indicated by an arrow at 14:45
The measured insect activity over range during the peak activity is plotted in Fig. 4. From the gathered lidar data, we hypothesized that the spatial distribution of insect activity can be explained by three types of observations: hive activity, due to honeybees flying around near the hives, honeybees foraging within the field and background activity from wild insects. The activity from male drones is neglected in this model, since they generally only make up less than 10% of the total population in a beehive [55, 56]. Drones can aggregate in drone congregation areas (DCAs), but these generally occurs at higher altitudes than we’ve monitored in this study [57]. To quantify the honeybee and wild insect activity we used a spatial model to decompose the observed range distribution into these three components. In simple terms: insect distributions centered around the beehives are assumed to be either clustering, or foraging bees. This is modelled as
where Nw is the number of wild insects, Nfo is the number of foraging honeybees and Nhive is the hive activity from honeybees located near the hives.

Range distribution of detected insect observations between 14:45 and 15:00, 5/7 2017. The range distribution is approximated by three distributions. The peak in activity next to the beehives at 180 m is fitted by the red curve Nh and assumed to be the result of bees clustering near the hives. Foraging bees are fitted by the purple curve Nfo. The distribution from background insects not centered around the beehives, Nw, is plotted in green
The distribution of wild insects is defined as a negative exponential function:
where r is the range from the lidar, and α is a negative parameter which depends on the optical properties of the targets. This reciprocal distribution is caused by the reduced sensitivity of the lidar with range and the expected measured result from insects distributed homogenously in the field [54].
The hive activity and foraging honeybees are modelled as Gaussian distributions, Nh and Nfo, centered around the beehive cluster:
where \({N}_{0fo}\) is the maximum number of observations, \({r}_{c}\) is the centre position and R is the width of the curve.
The model in Eqs. (2)–(4) has 8 free parameters and was fitted to aggregated range distributions with a bin width of 2 m, yielding 360 datapoints from 35 to 755 m. using Scipy’s optimization package [58]. The model was fitted to 15 min subsets of the collected insect observations and had an average adjusted r-squared correlation coefficient of 0.96 with a standard deviation of 0.026.
The foraging distribution (shown in purple in Fig. 4) includes both flights to and from foraging sites as well as actual foraging flights. The width of the foraging distribution describes the foraging range from the beehives and has an average full width half maximum of 153 m throughout the full measurement period, with a standard deviation of 50 m.
All insect observations were split into three groups, matching the regions, where Nw, Nh or Nfo dominated the model as illustrated in Fig. 4. To investigate the assumption that these groups consist of different insect species, we estimated the modulation powers of a sample of insects selected in the dominating range interval of each group by the Welch method [59]. In Fig. 5, the median power spectra from 500 random observations recorded in rw, rh and rfo is presented. We see that both honeybee distributions have a strong peak around 180–220 Hz which fits well with the expected wingbeat frequency for honeybees from literature [60,61,62]. Wild insects show a different distribution with lower and more varied wingbeat frequencies than the clustered and foraging bees. We only counted honeybees and bumble bees during the Pollard walks but many other small insects can be expected to be active in the field.

Modulation power frequency distributions. Green curve represents the wild insects observed in rw region, red curve represents the hive activity in the rh region. The purple curve represents the foraging bees observed in the rfo region. Median intensity is plotted as a solid line and the IQR between 25 and 75% as a band. The insect observations recorded in the rh and rfo regions are assumed to be honeybees in the model. This is supported by the spectra, since they show a strong peak between 180 and 220 Hz
Fitting the spatial model to all data, the number of wild insects, clustering and foraging bees can be estimated for the full measurement period. The result is plotted together with the ground truthing results in Fig. 6. The lidar was shut down for ca 20 min due to computer problems on 4 July around 11:00 and thus, some data points are missing in Fig. 6. The lidar data from 6 July is shown separately in Fig. 7.

Lidar insect counts, Wbee loss, and Pollard walk observations over time. The clustered and foraging bees detected by the lidar show a different temporal pattern than the background insects, which are active later in the evening. This correlates with the estimate of bee activity determined from hive scales and with the transect counts

a Insect activity over time, range and flight height. Each dot represents one observation. Observations recorded in the lower transect are plotted in blue. Observations from the higher transect are plotted in orange. The majority of observations are recorded close to the beehive at 180 m. Note that the variation in ground level is exaggerated by the different scales on the height and distance axes. b Distribution over range during the third day for both transects. In the lower transect, we see a high number of bees concentrated in a small area, whereas in the higher transect, we see fewer and a broader distribution of insects which indicates a “funnel like” distribution above the beehives. c Median frequency composition and IQR for the low and high transect within 15 m of the beehives. Insect in the high transect have a 7% higher average wingbeat frequency. The lower transect also shows more activity at lower frequencies from wild insects
In Fig. 6a, b, we see that the hive activity and foraging bees show a strong daily pattern, where activity rises during the morning, reaches peak activity around 14:00 both days, slightly after the solar noon at 13:18 [63] and decreases in the afternoon. In contrast, the wild insect activity shows a more consistent activity throughout the day, and even increases throughout the entire second day.
The lidar measurements of bee activity show good correlation with the reference measurements (Table 1). The correlation between the Pollard walk counts and hive scale measurements were calculated by linearly interpolating between the two closest sample points of the hive scales to each Pollard walk. The correlation between the Pollard walks and the lidar was calculated by interpolating the between the two closest 15 min recording intervals to each Pollard walk. Since the lidar was alternated between a higher and lower transect during the third day, it gradually became un-aligned and recorded fewer and fewer observations in each timeslot. Lidar data from 6 July is, therefore, not comparable to the two previous days or used in the correlation calculations.
The transect walks by the wheel track show a slightly better correlation with hive and lidar measurements than the flower path, possibly because the honeybees were easier to spot in the low clover crop than in the flower strip. The lidar shows slightly better correlation with the loss in hive weights than with the Pollard walk observations. This is also shown in Fig. 8.

Measured honeybee activity from the lidar is correlated with the observations from the transect walks (a). The correlation is even stronger between the lidar and the hive weights (b). The interpretation could be that the lidar and hive scales measure all flight activity, whereas the Pollard walks only measure bees foraging in part of the field
Analyzing lidar data from the third day when the beam was altered between two transects, we find ~ 68% more bees in the lower transect than in the upper. The bees observed near the beehives in the upper transect are also more dispersed, as shown in Fig. 7a, b. The average wingbeat frequency spectra in the lower and, respectively, upper transect are shown in Fig. 7c. By fitting a spectral model from [64], the fundamental frequency in the lower and, respectively, upper transect can be estimated. With an explanation grade for the model of > 98%, the fundamental wingbeat frequency was calculated to 179.6 Hz with in the lower transect and 191.5 Hz in the upper transect. Confidence intervals were 178.8 Hz to 180.4 Hz and 191 Hz to 192 Hz, respectively.
Discussion
In this study, we have separated hive activity and foraging bees from wild insects. The measured activity is correlated with alternative measures of activity obtained by hive scales and Pollard walks. The average foraging distance is estimated and the insect distribution close to the hives is profiled by multiplexing the height of the beam.
The large abundance of honeybees in this experimental setup made it possible to assume that the vast majority of insects centered around the beehives were due to hive activity or foraging honeybees. While there were several beehive clusters in the field, the selected cluster was relatively isolated from the others and we could assume that insects showing a different spatial distribution were other insects. This made it possible to calculate the honeybee activity and foraging range without individually classifying each observation. This simplification was validated by the frequency spectra shown in Fig. 5. The drone activity was ignored as they only make up a relatively small fraction of the individuals in a beehive.
The lidar, beehive scales and manual transect walks all show good agreement on the honeybee activity (Table 1). However, using the beehive scales to monitor activity is based on the approximation that the weight is linearly changing by a constant rate from midnight to midnight. This is an assumption; the weight of the hives depends on the feed brought into the hive, the feed eaten and the weight of the bee population within the hive. The lidar measurements are more strongly correlated with the hive scales than the Pollard transects. One interpretation is that the hive scales and lidar measure all flight activity, while the Pollard transects mainly record flower visits and flights close to the ground level. Alternatively, the Pollard counts are prone to more random variation, caused by observations of shorter time duration, smaller spatial scale covered and bee detectability. In addition, both the lidar and the hive scales are more strongly correlated with the activity in the wheel track than in the flower strip. This could indicate that the bees from the monitored hive were mainly foraging in the nearby white clover, or that the honeybees were more difficult to count in the high growing flower strip.
By modulating the beam between a lower and higher path, we profiled the honeybee activity at two heights. The fewer and more dispersed insects in the upper beam seems to indicate a “funnel like” distribution of bees over the beehives, widening with height, as shown in Fig. 7a, b. Orientation flights of new workers have been described as a spiral widening with height and could contribute to this distribution [65]. However, the number of orientation flights is expected to be low compared to the number of foraging flights. In addition, the insects observed in the upper beam had 7% higher wingbeat frequency, as can be seen in Fig. 7c. If returning bees carrying nectar and pollen have a higher wingbeat frequency, the results indicate a scenario, where bees leave the hives flying close to the ground for foraging. Once fully loaded, ca 150 m from the hive, they return to the hive on a higher trajectory, as illustrated in Fig. 9. However, a recent study based on a limited number of measurements failed to find a correlation between weight load and wingbeat frequency [61]. Other work on bumble bees show that payload initially affect flight pitch angle and that the wing beat frequency is only increased in extreme cases [66]. Wingbeat frequency increases with temperature, and since the air is expected to be warmer near the ground, a thermal difference between the beams is unlikely to be the cause.

Funnel-like distribution and differences in wingbeat frequency could be explained by a model, where insects leaving the hive fly at lower height, close to the ground, while returning bees fly along a higher path. In this study, the full-width-half-maximum (FWHM) of the foraging range was ca 150 m
A few previous experiments used a “scanning” beam to map insect activity in three dimensional space [67], but to our knowledge this is the first time this is combined with automated algorithms for individual event extraction on a large number of observations. In this work, the beam was moved manually and only vertically but the logical progression would be to alternate the beam horizontally over more transects and automate the movement. One could also employ a 2D detector chip in combination with a laser sheet [68]. This would allow a 2D model of the foraging range within the field. We wish to explore this in future studies. Although this experiment only covered total of ~ 23 h of recordings, the high number of collected recordings allows statistical analysis of temporal changes with 15 min resolution. This is to the best of our knowledge not possible with any other insect monitoring method.
In this study, the range distribution of the foraging bees had an average full width half maximum of ~ 150 m. This can be compared to studies in the literature which finds that foraging ranges vary from 45 to 6000 m, with average foraging distances typically around 600 m to 800 m depending on colony size, foraging resources and time of year, with shorter distances in early summer [69, 70]. In this field, the hives were placed in the middle of a food source which has been shown to result in shorter foraging distances [23]. However, as discussed in Fig. 4, the sensitivity of the lidar decreases with range due to the optical configuration. Therefore, the minimum detectable target size decreases with range, and in addition, the beam’s elevation over the crop is also varying along the transect. This makes it hard to quantitatively compare the activity at different distances [23]. A future more complex parameterization model could take these parameters into account as discussed in [54] and investigate inhomogeneous distributions of wild insects, pollinator competition and displacement of wild pollinators.
Outlook
Since the height of the beam strongly influences the number of detected observations, it is challenging for lidar entomologists to compare insect activity levels at different locations. Regardless, the instrumentation can be a vital tool to investigate the behavior of bees and wild insects. In this study, a simple spatial model was relied on to discriminate target types and provide quantitative estimates of their relative occurrence. As characterization of the scattering properties of individual insects develops, discrimination at the level of individual transit observations may become possible [71,72,73].
While instrumentation used in this study is commercially available, it currently requires skilled technicians for alignment and operations. As the entomological lidar community is growing and research groups are active in several countries and continents, there are good prospects for the methodology becoming accessible for entomologists and ecologists in general.
Conclusions
We deployed an entomological lidar in a homogenous flowering white clover field and profiled the honeybee activity around a cluster of beehives over time. By decomposing the observations into hive activity, foraging honeybees and wild insects the number of honeybees engaged in flight activities could be estimated and showed good correlation with estimates from hive scales and Pollard walks. In addition to counting the number of active bees, average foraging distance was estimated. In addition, the three-dimensional distribution of honeybees around the hives was investigated by moving the beam between an upper and lower height.
This work has shown the ability to record very high number of insects during a short time period, which allows the study of insect activity with a very high temporal resolution. We propose that lidar monitoring can change pollinator research in the future by providing valuable new information on how external factors influence pollinator activity.
Availability of data and materials
The data set used will be made available in a reduced format at a public repository at publication. In addition, contact information to potential regional entomological research groups can be acquired from the authors by request.
References
Hallmann CA, Sorg M, Jongejans E, Siepel H, Hofland N, Schwan H, et al. More than 75 percent decline over 27 years in total flying insect biomass in protected areas. PLoS ONE. 2017;12:10.
Ollerton J. Pollinator diversity: distribution, ecological function, and conservation. Annu Rev Ecol Evol Syst. 2017;48:353–76.
Klein A-M, Vaissiere BE, Cane JH, Steffan-Dewenter I, Cunningham SA, Kremen C, et al. Importance of pollinators in changing landscapes for world crops. Proc R Soc B Biol Sci. 2007;274(1608):303–13.
Garibaldi LA, Steffan-Dewenter I, Winfree R, Aizen MA, Bommarco R, Cunningham SA, et al. Wild Pollinators Enhance Fruit Set of Crops Regardless of Honey Bee Abundance. Science. 2013 Mar 29;339(6127):1608 LP – 1611. http://science.sciencemag.org/content/339/6127/1608.abstract
Stanley DA, Msweli SM, Johnson SD. Native honeybees as flower visitors and pollinators in wild plant communities in a biodiversity hotspot. Ecosphere. 2020;11:2.
Potts SG, Roberts SPM, Dean R, Marris G, Brown MA, Jones R, et al. Declines of managed honey bees and beekeepers in Europe. J Apic Res. 2010;49(1):15–22.
Powney GD, Carvell C, Edwards M, Morris RKA, Roy HE, Woodcock BA, et al. Widespread losses of pollinating insects in Britain. Nat Commun [Internet]. 2019;10(1):1–6. https://doi.org/10.1038/s41467-019-08974-9.
Potts SG, Ngo HT, Biesmeijer JC, Breeze TD, Dicks L V, Garibaldi LA, et al. The assessment report of the Intergovernmental Science-Policy Platform on Biodiversity and Ecosystem Services on pollinators, pollination and food production. 2016;
Goulson D, Nicholls E, Botías C, Rotheray EL. Bee declines driven by combined stress from parasites, pesticides, and lack of flowers. Science. 2015;347(6229):1255957.
Breeze TD, Boreux V, Cole L, Dicks L, Klein A, Pufal G, et al. Linking farmer and beekeeper preferences with ecological knowledge to improve crop pollination. People Nat. 2019;1(4):562–72.
Sponsler DB, Johnson RM. Honey bee success predicted by landscape composition in Ohio USA. PeerJ. 2015;3:e838.
Kacelnik A, Houston AI, Schmid-Hempel P. Central-place foraging in honey bees: the effect of travel time and nectar flow on crop filling. Behav Ecol Sociobiol. 1986;19(1):19–24.
Cresswell JE, Osborne JL, Goulson D. An economic model of the limits to foraging range in central place foragers with numerical solutions for bumblebees. Ecol Entomol. 2000;25(3):249–55.
Smith HG, Birkhofer K, Clough Y, Ekroos J, Olsson O, Rundlöf M. Beyond dispersal: the role of animal movement in modern agricultural landscapes. In: Animal Movement Across Scales. Oxford University Press; 2014. p. 51–70.
Steffan-Dewenter I, Münzenberg U, Bürger C, Thies C, Tscharntke T. Scale-dependent effects of landscape context on three pollinator guilds. Ecology. 2002;83(5):1421–32.
Persson AS, Rundlöf M, Clough Y, Smith HG. Bumble bees show trait-dependent vulnerability to landscape simplification. Biodivers Conserv. 2015;24(14):3469–89.
Bommarco R, Lundin O, Smith HG, Rundlöf M. Drastic historic shifts in bumble-bee community composition in Sweden. Proc R Soc B Biol Sci. 2012;279(1727):309–15.
Herbertsson L, Lindström SAM, Rundlöf M, Bommarco R, Smith HG. Competition between managed honeybees and wild bumblebees depends on landscape context. Basic Appl Ecol. 2016;17(7):609–16.
Thomson DM, Page ML. The importance of competition between insect pollinators in the Anthropocene. Curr Opin Insect Sci. 2020;38:55–62.
Westphal C, Steffan-Dewenter I, Tscharntke T. Bumblebees experience landscapes at different spatial scales: possible implications for coexistence. Oecologia. 2006;149(2):289–300.
Bolin A, Smith HG, Lonsdorf EV, Olsson O. Scale-dependent foraging tradeoff allows competitive coexistence. Oikos. 2018;127(11):1575–85.
Herrera CM. Daily patterns of pollinator activity, differential pollinating effectiveness, and floral resource availability, in a summer-flowering Mediterranean shrub. Oikos. 1990;1:277–88.
Danner N, Molitor AM, Schiele S, Härtel S, Steffan-Dewenter I. Season and landscape composition affect pollen foraging distances and habitat use of honey bees. Ecol Appl. 2016;26(6):1920–9.
Pope NS, Jha S. Seasonal food scarcity prompts long-distance foraging by a wild social bee. Am Nat. 2018;191(1):45–57.
Willmer PG, Bataw AAM, Hughes JP. The superiority of bumblebees to honeybees as pollinators: insect visits to raspberry flowers. Ecol Entomol. 1994;19(3):271–84.
Redhead JW, Dreier S, Bourke AFG, Heard MS, Jordan WC, Sumner S, et al. Effects of habitat composition and landscape structure on worker foraging distances of five bumble bee species. Ecol Appl. 2016;26(3):726–39.
Baum KA, Wallen KE. Potential bias in pan trapping as a function of floral abundance. J Kansas Entomol Soc. 2011;84(2):155–9.
Garratt MPD, Senapathi D, Coston DJ, Mortimer SR, Potts SG. The benefits of hedgerows for pollinators and natural enemies depends on hedge quality and landscape context. Agric Ecosyst Environ. 2017;247:363–70.
Drake VA, Reynolds DR. Radar entomology: observing insect flight and migration. Cabi; 2012.
Daniel Kissling W, Pattemore DE, Hagen M. Challenges and prospects in the telemetry of insects. Biol Rev. 2014;89(3):511–30.
Westbrook JK, Eyster RS, Wolf WW. WSR-88D doppler radar detection of corn earworm moth migration. Int J Biometeorol. 2014;58(5):931–40.
Gauthreaux SA Jr, Livingston JW, Belser CG. Detection and discrimination of fauna in the aerosphere using Doppler weather surveillance radar. Integr Comp Biol. 2008;48(1):12–23.
Riley JR, Valeur P, Smith AD, Reynolds DR, Poppy GM, Löfstedt C. Harmonic radar as a means of tracking the pheromone-finding and pheromone-following flight of male moths. J Insect Behav. 1998;11(2):287–96.
Ovaskainen O, Smith AD, Osborne JL, Reynolds DR, Carreck NL, Martin AP, et al. Tracking butterfly movements with harmonic radar reveals an effect of population age on movement distance. Proc Natl Acad Sci. 2008;105(49):19090–5.
Riley JR, Smith AD, Reynolds DR, Edwards AS, Osborne JL, Williams IH, et al. Tracking bees with harmonic radar. Nature. 1996;379(6560):29–30. https://doi.org/10.1038/379029b0.
Shaw JA, Seldomridge NL, Dunkle DL, Nugent PW, Spangler LH, Bromenshenk JJ, et al. Polarization lidar measurements of honey bees in flight for locating land mines. Opt Express. 2005;13(15):5853–63.
Guan Z, Brydegaard M, Lundin P, Wellenreuther M, Runemark A, Svensson EI, et al. Insect monitoring with fluorescence lidar techniques: field experiments. Appl Opt. 2010;49(27):5133–42.
Brydegaard M, Svanberg S. Photonic monitoring of atmospheric and aquatic fauna. Laser Photon Rev. 2018;12(12):1800135.
Li M, Jansson S, Runemark A, Peterson J, Kirkeby CT, Jönsson AM, et al. Bark beetles as lidar targets and prospects of photonic surveillance. J Biophotonics. 2020;1:1–16.
Brydegaard M, Gebru A, Kirkeby C, Åkesson S, Smith H. Daily evolution of the insect biomass spectrum in an agricultural landscape accessed with lidar. In: EPJ Web of Conferences. EDP Sciences; 2016. p. 22004.
Malmqvist E, Jansson S, Zhu S, Li W, Svanberg K, Svanberg S, et al. The bat–bird–bug battle: Daily flight activity of insects and their predators over a rice field revealed by high-resolution scheimpflug lidar. R Soc Open Sci. 2018;5:4.
Brydegaard M, Jansson S. Advances in entomological laser radar. IET Int Radar Conf. 2018;(Irc 2018):2–5.
Brydegaard M, Jansson S, Malmqvist E, Mlacha Y, Gebru A, Okumu F, et al. Lidar reveals activity anomaly of malaria vectors during pan-African eclipse. Sci Adv. 2020;13:6.
Hoffman DS, Nehrir AR, Repasky KS, Shaw JA, Carlsten JL. Range-resolved optical detection of honeybees by use of wing-beat modulation of scattered light for locating land mines. Appl Opt. 2007;46(15):3007–12.
Brydegaard M, Malmqvist E, Jansson S, Larsson J, Török S, Zhao G. The Scheimpflug lidar method. In: Lidar Remote Sensing for Environmental Monitoring 2017. International Society for Optics and Photonics; 2017. p. 104060I.
Pollard E. A method for assessing changes in the abundance of butterflies. Biol Conserv. 1977;12(2):115–34.
Brydegaard M, Gebru A, Svanberg S. Super Resolution Laser Radar with Blinking Atmospheric Particles––Application to Interacting Flying Insects. Prog Electromagn Res. 2014;147:141–51.
Malmqvist E, Jansson S, Török S, Brydegaard M. Effective parameterization of laser radar observations of atmospheric fauna. IEEE J Sel Top Quantum Electron. 2015;22:1.
Rosenkranz BC, Lund J. Danmarks Højdemodel-én model med et utal af anvendelser. Geoforum Perspekt. 2015;14:26.
Mei L, Brydegaard M. Continuous-wave differential absorption lidar. Laser Photonics Rev. 2015;9(6):629–36.
Brydegaard M, Gebru A, Svanberg S. Super resolution laser radar with blinking atmospheric particles—application to interacting flying insects. Prog Electromagn Res. 2014;147:141–51.
Torok S. Kilohertz electro-optics for remote sensing of insect dispersal. These. 2013.
Malmqvist E. From Fauna to Flames : remote sensing with Scheimpflug-Lidar. [Lund]: Division of Combustion Physics, Department of Physics, Lund University; 2019.
Jansson S. Entomological lidar : target characterization and field applications. Lund: Division of Combustion Physics, Department of Physics, Lund University; 2020.
Page RE, Metcalf RA. A population investment sex ratio for the honey bee (Apis mellifera L.). Am Nat. 1984;124(5):680–702.
Allen MD. Drone production in honey-bee colonies (Apis mellifera L.). Nature. 1963;199(4895):789–90.
Loper GM, Wolf WW, Taylor OR. Honey bee drone flyways and congregation areas: radar observations. J Kansas Entomol Soc. 1992;1:223–30.
Virtanen P, Gommers R, Oliphant TE, Haberland M, Reddy T, Cournapeau D, et al. SciPy 1.0: fundamental algorithms for scientific computing in Python. Nat Methods. 2020;17(3):261–72.
Welch P. The use of fast Fourier transform for the estimation of power spectra: a method based on time averaging over short, modified periodograms. IEEE Trans audio Electroacoust. 1967;15(2):70–3.
Byrne, David N and Buchmann, Stephen L and Spangler HG. Relationship Between Wing Loading, Wingbeat Frequency and Body Mass in Homopterous Insects. J Exp Biol. 1988;135(1):9 LP – 23.
Feuerbacher E, Fewell JH, Roberts SP, Smith EF, Harrison JF. Effects of load type (pollen or nectar) and load mass on hovering metabolic rate and mechanical power output in the honey bee Apis mellifera. J Exp Biol. 2003;206(11):1855–65.
Altshuler DL, Dickson WB, Vance JT, Roberts SP, Dickinson MH. Short-amplitude high-frequency wing strokes determine the aerodynamics of honeybee flight. Proc Natl Acad Sci U S A. 2005;102(50):18213–8.
Timeanddate.com. [cited 2020 Apr 17]. https://www.timeanddate.com/sun/@2618263?month=7&year=2017. Accessed 17 Apr 2020.
Malmqvist E, Brydegaard M. Applications of KHZ-CW Lidar in Ecological Entomology. EPJ Web Conf. 2016;119:4–7.
Capaldi EA, Dyer FC. The role of orientation flights on homing performance in honeybees. J Exp Biol. 1999;202(12):1655–66.
Combes SA, Gagliardi SF, Switzer CM, Dillon ME. Kinematic flexibility allows bumblebees to increase energetic efficiency when carrying heavy loads. Sci Adv. 2020;6:6.
Tauc MJ, Fristrup KM, Repasky KS, Shaw JA. Field demonstration of a wing-beat modulation lidar for the 3D mapping of flying insects. OSA Contin. 2019;2(2):332.
Gao F, Lin H, Chen K, Chen X, He S. Light-sheet based two-dimensional Scheimpflug lidar system for profile measurements. Opt Express. 2018;26(21):27179.
Abou-Shaara H. The foraging behaviour of honey bees. Apis mellifera: A review Vet Med (Praha). 2014;1(59):1–10.
Hagler J, Mueller S, Teuber L, Machtley S, Deynze A. Foraging Range of Honey Bees, Apis mellifera, in Alfalfa Seed Production Fields. J Insect Sci. 2011;1(11):144.
Li M, Jansson S, Runemark A, Peterson J, Kirkeby CT, Jönsson AM, et al. Bark beetles as lidar targets and prospects of photonic surveillance. J Biophotonics. 2020.
Kirkeby C, Rydhmer K, Cook SM, Strand A, Torrance MT, Swain JL, et al. Advances in automatic identification of flying insects using optical sensors and machine learning. Sci Rep. 2021;11(1):1555.
Genoud AP, Gao Y, Williams GM, Thomas BP. A comparison of supervised machine learning algorithms for mosquito identification from backscattered optical signals. Ecol Inform. 2020;58:101090.
Acknowledgements
We thank Frederik Taarnhøj for assisting with the grant proposal, Flemming Rasmussen, Per Kryger, Janne Kool, Alem Gebru and Josephine Nielsen for assistance during the field measurements. We thank Krenkerup Estate for access to the white clover seed crop and Mr. Søren Jespersen and Mathias Knudsen for information on crop management and support setting up the equipment in the field.
Funding
This study was supported by a grant by Idagaardfonden, Denmark, Innovation Foundation, Denmark, the Swedish Research Council, Norsk Elektro Optikk AS, Norway, Formas Sweden and 15. Juni and Aage V. Jensen Nature Foundations, Denmark.
Author information
Authors and Affiliations
Contributions
KR, JP and BB conceived the experiment and acquired the grant. MB constructed the lidar instrument and wrote the initial analysis code. KR and JP carried out the experiment on site. KR and HS drafted the manuscript. CK, MB and IS directed data analysis. KR analyzed data and produced graphical items. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
KR, CK, JP and MB are presently or formerly affiliated, employees or shareholders of FaunaPhotonics. We declare that this has not affected the reported results or interpretations in any way.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Rydhmer, K., Prangsma, J., Brydegaard, M. et al. Scheimpflug lidar range profiling of bee activity patterns and spatial distributions. Anim Biotelemetry 10, 14 (2022). https://doi.org/10.1186/s40317-022-00285-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-022-00285-z