
Abstract
The purpose of this paper is to study the extra-gradient methods for solving split feasibility and fixed point problems involved in pseudo-contractive mappings in real Hilbert spaces. We propose an Ishikawa-type extra-gradient iterative algorithm for finding a solution of the split feasibility and fixed point problems involved in pseudo-contractive mappings with Lipschitz assumption. Moreover, we also suggest a Mann-type extra-gradient iterative algorithm for finding a solution of the split feasibility and fixed point problems involved in pseudo-contractive mappings without Lipschitz assumption. It is proven that under suitable conditions, the sequences generated by the proposed iterative algorithms converge weakly to a solution of the split feasibility and fixed point problems. The results presented in this paper extend and improve some corresponding ones in the literature.
Similar content being viewed by others


1 Introduction
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A: \mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator with its adjoint \(A^{*}\). Let \(S: \mathcal {H}_{2}\rightarrow\mathcal{H}_{2}\) and \(T: \mathcal{H}_{1}\rightarrow \mathcal{H}_{1}\) be two nonlinear mappings.
The purpose of this paper is to study the following split feasibility and fixed point problems:
We use Γ to denote the set of solutions of (1.1), that is,
In the sequel, we assume \(\Gamma\neq\emptyset\).
A special case of the split feasibility and fixed point problems is the split feasibility problem (SFP):
We use \(\Gamma_{0}\) to denote the set of solutions of (1.2), that is,
The SFP in finite-dimensional Hilbert spaces was first introduced by Censor and Elfving [1] for modeling inverse problems which arise from phase retrievals and in medical image reconstruction [2]. Recently, it has been found that the SFP can be applied to study intensity-modulated radiation therapy (IMRT) [3–5]. In the recent past, a wide variety of iterative algorithms have been used in signal processing and image reconstruction and for solving the SFP; see, for example, [2, 4, 6–10] and the references therein (see also [11–13] for relevant projection methods for solving image recovery problems).
The original algorithm given in [1] involves the computation of the inverse \(A^{-1}\) (assuming the existence of the inverse of A), and thus does not become popular. A seemingly more popular algorithm that solves the SFP is the CQ algorithm presented by Byrne [2]:
where the initial guess \(x_{0}\in\mathcal{H}_{1}\) and \(\gamma\in(0,\frac {2}{\lambda})\), with λ being the largest eigenvalue of the matrix \(A^{*}A\). Algorithm (1.3) is found to be a gradient-projection method (GPM) in convex minimization. It is also a special case of the proximal forward-backward splitting method [14]. The CQ algorithm only involves the computations of the projections \(P_{C}\) and \(P_{Q}\) onto the sets C and Q, respectively.
Many authors have also made a continuation of the study on the CQ algorithm and its variant form, refer to [15–21]. In 2010, Xu [15] applied a Mann-type iterative algorithm to the SFP and proposed an average CQ algorithm which was proven to be weakly convergent to a solution of the SFP. He derived a weak convergence result, which shows that for suitable choices of iterative paraments, the sequence of iterative algorithm solutions can converge weakly to an exact solution of the SFP.
On the other hand, in 1976, to study the saddle point problem, Korpelevich [22] introduced the so-called extra-gradient method:
where \(\lambda>0\), operator \(\mathcal{A}\) is both strongly monotone and Lipschitz continuous.
Very recently, Ceng et al. [23] studied extra-gradient method for finding a common element of the solution set \(\Gamma_{0}\) of the SFP and the set \(\operatorname{Fix}(S)\) of fixed points of a nonexpansive mapping S in the setting of infinite-dimensional Hilbert spaces. Motivated and inspired by Nadezhkina and Takahashi [24], the authors proposed an iterative algorithm in the following manner:
where \(\{\lambda_{n}\}\subset[a,b]\) for some \(a, b\in (0, \frac{1}{\|A\|^{2}} )\) and \(\{\beta_{n}\}\subset[c, d]\) for some \(c, d\in(0, 1)\). The authors proved that the sequences generated by (1.4) converge weakly to an element \(x\in\Gamma_{0}\cap \operatorname{Fix}(S)\).
In 2014, Yao et al. [25] studied the split feasibility and fixed point problems. They constructed an iterative algorithm in the following way:
where \(\{\alpha_{n}\}\), \(\{\beta_{n}\}\), \(\{\gamma_{n}\}\) are three real number sequences in \((0,1)\) and δ is a constant in \((0,\frac {1}{\|A\|^{2}} )\). The authors proved that the sequences generated by (1.5) converge strongly to a solution of the split feasibility and fixed point problems.
In this paper, motivated by the work of Ceng et al. [23], Yao et al. [25], we propose an Ishikawa-type extra-gradient iterative algorithm for finding a solution of the split feasibility and fixed point problems involved in pseudo-contractive mappings with Lipschitz assumption. On the other hand, we also suggest a Mann-type extra-gradient iterative algorithm for finding a solution of the split feasibility and fixed point problems involved in pseudo-contractive mappings without Lipschitz assumption. We establish weak convergence theorems for the sequences generated by the proposed iterative algorithms. Our results substantially improve and develop the corresponding results in [15, 23–25]; for example, [15], Theorem 3.6, [23], Theorem 3.2, [24], Theorem 3.1 and [25], Theorem 3.2. It is noteworthy that our results are new and novel.
2 Preliminaries
Let \(\mathcal{H}\) be a real Hilbert space whose inner product and norm are denoted by \(\langle\cdot,\cdot\rangle\) and \(\|\cdot\|\), respectively. Let C be a nonempty closed convex subset of \(\mathcal {H}\). We write \(x_{n}\rightharpoonup x\) to indicate that the sequence \(\{x_{n}\}\) converges weakly to x and \(x_{n}\rightarrow x\) to indicate that the sequence \(\{x_{n}\}\) converges strongly to x. Moreover, we use \(\omega_{w}(x_{n})\) to denote the weak ω-limit set of the sequence \(\{x_{n}\}\), that is,
Projections are an important tool for our work in this paper. Recall that the (nearest point or metric) projection from \(\mathcal{H}\) onto C, denoted by \(P_{C}\), is defined in such a way that, for each \(x\in \mathcal{H}\), \(P_{C}x\) is the unique point in C with the property
Some important properties of projections are gathered in the following proposition.
Proposition 2.1
Given \(x\in\mathcal{H}\) and \(z\in C\),
-
(1)
\(z=P_{C}x\Leftrightarrow\langle x-z, y-z\rangle\leq0\) for all \(y\in C\);
-
(2)
\(z=P_{C}x\Leftrightarrow\|x-z\|^{2}\leq\|x-y\|^{2}-\|y-z\|^{2}\) for all \(y\in C\);
-
(3)
\(\langle x-y, P_{C}x-P_{C}y \rangle\geq \Vert P_{C}x-P_{C}y \Vert ^{2}\) for all \(y\in\mathcal{H}\), which hence implies that \(P_{C}\) is nonexpansive.
We also need other sorts of nonlinear operators which are stated as follows.
Definition 2.1
A nonlinear operator \(T: \mathcal{H}\rightarrow\mathcal {H}\) is said to be
-
(1)
L-Lipschitzian if there exists \(L>0\) such that
$$ \Vert Tx-Ty\Vert \leq L\|x-y\|,\quad \forall x,y\in\mathcal{H}; $$if \(L=1\), we call T nonexpansive;
-
(2)
firmly nonexpansive if \(2T-I\) is nonexpansive, or equivalently,
$$ \langle x-y, Tx-Ty \rangle\geq \Vert Tx-Ty\Vert ^{2},\quad \forall x,y\in\mathcal{H}; $$alternatively, T is firmly nonexpansive if and only if T can be expressed as
$$ T=\frac{1}{2}(I+S), $$where \(S:\mathcal{H}\rightarrow\mathcal{H}\) is nonexpansive;
-
(3)
monotone if
$$ \langle x-y, Tx-Ty \rangle\geq0,\quad \forall x,y\in\mathcal{H}; $$ -
(4)
β-strongly monotone, with \(\beta>0\), if
$$ \langle x-y, Tx-Ty \rangle\geq\beta\|x-y\|^{2},\quad \forall x,y\in \mathcal{H}; $$ -
(5)
ν-inverse strongly monotone (ν-ism), with \(\nu>0\), if
$$ \langle x-y, Tx-Ty \rangle\geq\nu \Vert Tx-Ty\Vert ^{2},\quad \forall x,y\in\mathcal{H}. $$
Inverse strongly monotone (also referred to as co-coercive) operators have been widely applied in solving practical problems in various fields, for instance, in traffic assignment problems; see, for example, [26, 27].
It is well known that metric projection \(P_{C}:\mathcal{H}\rightarrow C\) is firmly nonexpansive, that is,
For all \(x, y\in\mathcal{H}\), the following conclusions hold:
and
On the other hand, in a real Hilbert space \(\mathcal{H}\), a mapping \(T:C\rightarrow C\) is called pseudo-contractive if
It is well known that T is a pseudo-contractive mapping if and only if
The notation \(\operatorname{Fix}(T)\) denotes the set of fixed points of the mapping T, that is, \(\operatorname{Fix}(T)=\{x\in\mathcal{H}:Tx=x\}\).
Proposition 2.2
[6]
Let \(T: \mathcal{H}\rightarrow\mathcal{H}\) be a given mapping.
-
(1)
T is nonexpansive if and only if the complement \(I-T\) is \(\frac {1}{2}\)-ism.
-
(2)
If T is ν-ism, then for \(\gamma>0\), γT is \(\frac{\nu }{\gamma}\)-ism.
-
(3)
T is averaged if and only if the complement \(I-T\) is ν-ism for some \(\nu>\frac{1}{2}\). Indeed, for \(\alpha\in(0,1)\), T is α-averaged if and only if \(I-T\) is \(\frac{1}{2\alpha}\)-ism.
Proposition 2.3
Let T be a pseudo-contractive mapping with the nonempty fixed point set \(\operatorname{Fix}(T)\), then the following conclusion holds:
Proof
From the definition of a pseudo-contractive mapping T, we have
□
Generally speaking, pseudo-contractive mappings are assumed to be L-Lipschitzian with \(L>1\). Next, to overcome the L-Lipschitzian property, we assume that the pseudo-contractive mapping T satisfies the following condition:
The following demiclosedness principle for pseudo-contractive mappings will often be used in the sequel.
Lemma 2.1
[28]
Let \(\mathcal{H}\) be a real Hilbert space, C be a closed convex subset of \(\mathcal{H}\). Let \(T:C\rightarrow C\) be a continuous pseudo-contractive mapping. Then
-
(1)
\(\operatorname{Fix}(T)\) is a closed convex subset of C;
-
(2)
\((I-T)\) is demiclosed at zero.
The following result is useful when we prove weak convergence of a sequence.
Lemma 2.2
[29]
Let \(\mathcal{H}\) be a Hilbert space and \(\{x_{n}\} \) be a bounded sequence in \(\mathcal{H}\) such that there exists a nonempty closed convex set C of \(\mathcal{H}\) satisfying:
-
(1)
for every \(w\in C\), \(\lim_{n\rightarrow\infty}\|x_{n}-w\|\) exists;
-
(2)
each weak-cluster point of the sequence \(\{x_{n}\}\) is in C.
Then \(\{x_{n}\}\) converges weakly to a point in C.
We can use fixed point algorithms to solve the SFP on the basis of the following observation.
Let \(\lambda>0\) and assume that \(x^{*}\) solves the SFP. Then \(Ax^{*}\in Q\), which implies that \((I-P_{Q})Ax^{*}=0\), and thus, \(\lambda(I-P_{Q})Ax^{*}=0\). Hence, we have the fixed point equation \(x^{*}= (I-\lambda A^{*}(I-P_{Q})A )x^{*}\). Requiring that \(x^{*}\in C\), we consider the fixed point equation
It is proven in [15] that the solutions of the fixed point equation (2.6) are exactly the solutions of the SFP; namely, for given \(x^{*}\in\mathcal{H}_{1}\), \(x^{*}\) solves the SFP if and only if \(x^{*}\) solves the fixed point equation (2.6).
3 Ishikawa-type extra-gradient iterative algorithm involved in pseudo-contractive mappings with Lipschitz assumption
We are now in a position to propose an Ishikawa-type extra-gradient iterative algorithm for solving the split feasibility and fixed point problems involved in pseudo-contractive mappings with Lipschitz assumption.
Theorem 3.1
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(S:Q\rightarrow Q\) be a nonexpansive mapping and let \(T:C\rightarrow C\) be an L-Lipschitzian pseudo-contractive mapping with \(L>1\). For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Ishikawa-type extra-gradient iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{2\|A\|^{2}} )\) and \(\{ \alpha_{n}\}, \{\beta_{n}\}\subset(0, 1)\) such that \(0< a<\beta_{n}<c<\alpha _{n}<b<\frac{1}{\sqrt{1+L^{2}}+1}\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (3.1) converges weakly to an element of Γ.
Proof
Taking \(x^{*}\in\Gamma\), we have \(x^{*}\in C\cap \operatorname{Fix}(T)\) and \(Ax^{*}\in Q\cap \operatorname{Fix}(S)\). For simplicity, we write \(\nabla f^{S}=A^{*}(I-SP_{Q})A\), \(v_{n}=P_{Q}Ax_{n}\), \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\) for all \(n\geq0\). Thus, we have \(y_{n}=P_{C}u_{n}\) for all \(n\geq0\). By (2.1), we get
Since \(P_{C}\) is nonexpansive, using (2.3), we get
Since A is a linear operator with its adjoint \(A^{*}\), we have
Again using (2.3), we obtain
From (3.2), (3.4) and (3.5), we get
Substituting (3.6) into (3.3) and by the assumption of \(\{\lambda_{n}\} \), we deduce
Since S and \(P_{Q}\) are nonexpansive, we know that composition operator \(SP_{Q}\) is still nonexpansive. By Proposition 2.2(1) the complement \(I-SP_{Q}\) is \(\frac{1}{2}\)-ism. Therefore, it is easy to see that \(\nabla f^{S}=A^{*}(I-SP_{Q})A\) is \(\frac{1}{2\|A\|^{2}}\)-ism, that is,
This together with Proposition 2.1(2) implies that
Further, by Proposition 2.1(1) and (3.8), we have
By the assumption of \(\{\lambda_{n}\}\), we obtain
Similarly, we have
From (2.4), we have
and
Applying equality (2.2), we have
Since T is L-Lipschitzian and \(z_{n}- ((1-\alpha_{n})z_{n}+\alpha _{n}Tz_{n} )=\alpha_{n}(z_{n}-Tz_{n})\), by (3.12), we have
From (3.11), (3.13) and (3.14), we deduce
Since \(\alpha_{n}< b<\frac{1}{\sqrt{1+L^{2}}+1}\), we derive that
This together with (3.15) implies that
By (2.2), (3.1) and (3.16), we have
This together with (3.9) implies that
for every \(x^{*}\in\Gamma\) and for all \(n\geq0\). Thus, \(\{x_{n}\}\) generated by algorithm (3.1) is the Féjer-monotone with respect to Γ. So, we obtain \(\lim_{n\rightarrow\infty}\|x_{n}-x^{*}\|\) exists immediately, this implies that \(\{x_{n}\}\) is bounded, the sequence \(\{ \|x_{n}-x^{*}\|\}\) is monotonically decreasing. Additionally, we get the boundedness of \(\{y_{n}\}\) and \(\{z_{n}\}\) from (3.7) and (3.9) immediately.
Returning to (3.9) and (3.17), we have
Hence,
which implies that
Similarly, we have
From (3.7) and (3.18), we have
which implies that
So,
From (3.9) and (3.17), we deduce
It follows that
Therefore,
Observe that
Thus,
This together with (3.19) implies that
Using the firm nonexpansiveness of \(P_{C}\), (2.1) and (3.3), we have
It follows that
From (3.18), we deduce
Since the sequence \(\{x_{n}\}\) is bounded, we can choose a subsequence \(\{x_{n_{i}}\}\) of \(\{x_{n}\}\) such that \(x_{n_{i}}\rightharpoonup\hat {x}\). Consequently, we derive from the above conclusions that
Applying Lemma 2.1, we deduce
Note that \(y_{n_{i}}=P_{C}u_{n_{i}}\in C\) and \(v_{n_{i}}=P_{Q}Ax_{n_{i}}\). From (3.20), we deduce
To this end, we deduce
That is to say, \(\hat{x}\in\Gamma\). This shows that \(\omega _{w}(x_{n})\subset\Gamma\). Since the \(\lim_{n\rightarrow\infty}\| x_{n}-x^{*}\|\) exists for every \(x^{*}\in\Gamma\), the weak convergence of the whole sequence \(\{x_{n}\}\) follows by applying Lemma 2.2. This completes the proof. □
Remark 3.1
Theorem 3.1 improves, extends and develops [15], Theorem 3.6, [23], Theorem 3.2, [24], Theorem 3.1 and [25], Theorem 3.2 in the following aspects.
-
Theorem 3.1 extends the extra-gradient method due to Nadezhkina and Takahashi [24], Theorem 3.1.
-
The corresponding iterative algorithms in [15], Theorem 3.6 and [23], Theorem 3.2 are extended for developing our Ishikawa-type extra-gradient iterative algorithm involved in pseudo-contractive mappings with Lipschitz assumption in Theorem 3.1.
-
The technique of proving weak convergence in Theorem 3.1 is different from those in [15], Theorem 3.6 and [23], Theorem 3.2 because our technique depends only on the demiclosedness principle for pseudo-contractive mappings in Hilbert spaces.
-
The problem of finding an element of Γ is more general than the problem of finding a solution of the SFP in [15], Theorem 3.6 and the problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(S)\) with \(S:C\rightarrow C\) being a nonexpansive mapping in [23], Theorem 3.2.
-
Algorithm 3.1 of Yao et al. [25] is extended to develop the Ishikawa-type extra-gradient iterative algorithm in our Theorem 3.1 by virtue of the extra-gradient method.
Furthermore, we can immediately obtain the following weak convergence results.
Corollary 3.1
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(S:Q\rightarrow Q\) be a nonexpansive mapping and let \(T:C\rightarrow C\) be an L-Lipschitzian pseudo-contractive mapping with \(L>1\). For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Ishikawa-type iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{\|A\|^{2}} )\) and \(\{ \alpha_{n}\}, \{\beta_{n}\}\subset(0, 1)\) such that \(0< a<\beta_{n}<c<\alpha _{n}<b<\frac{1}{\sqrt{1+L^{2}}+1}\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (3.21) converges weakly to an element of Γ.
Proof
Taking \(x^{*}\in\Gamma\), we have \(x^{*}\in C\cap \operatorname{Fix}(T)\) and \(Ax^{*}\in Q\cap \operatorname{Fix}(S)\). For simplicity, we write \(v_{n}=P_{Q}Ax_{n}\), \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\) for all \(n\geq0\). Thus, we have \(y_{n}=P_{C}u_{n}\) for all \(n\geq0\). Similarly to Theorem 3.1, we have
and
Thus, the boundedness of the sequence \(\{x_{n}\}\) yields our result.
From (3.22) and (3.23), we have
So,
Using the firm nonexpansiveness of \(P_{C}\), we have
This together with (3.23) implies that
Hence,
By setting \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\), it follows from (3.24) that
This together with (3.25) implies that
As in the proof of Theorem 3.1, we have \(\lim_{n\rightarrow\infty}\| y_{n}-Ty_{n}\|=0\).
Therefore, all the conditions in Theorem 3.1 are satisfied. The conclusion of Corollary 3.1 can be obtained from Theorem 3.1 immediately. □
Corollary 3.2
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(T:C\rightarrow C\) be an L-Lipschitzian pseudo-contractive mapping with \(L>1\) such that \(\Gamma_{0}\cap \operatorname{Fix}(T)\neq\emptyset\). For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Ishikawa-type extra-gradient iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{\|A\|^{2}} )\) and \(\{ \alpha_{n}\}, \{\beta_{n}\}\subset(0, 1)\) such that \(0< a<\beta_{n}<c<\alpha _{n}<b<\frac{1}{\sqrt{1+L^{2}}+1}\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (3.26) converges weakly to an element of \(\Gamma_{0}\cap \operatorname{Fix}(T)\).
Remark 3.2
Corollary 3.2 improves, extends and develops [15], Theorem 3.6 and [23], Theorem 3.2 in the following aspects.
-
Compared with [23], Theorem 3.2, Corollary 3.2 is essentially coincident with [23], Theorem 3.2 whenever \(\alpha_{n}=0\) and T is a nonexpansive mapping in the scheme (3.26).
-
The problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(T)\) with \(T:C\rightarrow C\) being a pseudo-contractive mapping is more general than the problem of finding a solution of the SFP in [15], Theorem 3.6 and the problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(S)\) with \(S:C\rightarrow C\) being a nonexpansive mapping in [23], Theorem 3.2.
4 Mann-type extra-gradient iterative algorithm involved in pseudo-contractive mappings without Lipschitz assumption
We are now in a position to propose a Mann-type extra-gradient iterative algorithm for solving the split feasibility and fixed point problems involved in pseudo-contractive mappings without Lipschitz assumption.
Theorem 4.1
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(S:Q\rightarrow Q\) be a nonexpansive mapping and let \(T:C\rightarrow C\) be a continuous pseudo-contractive mapping. For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Mann-type extra-gradient iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{2\|A\|^{2}} )\) and \(\{ \alpha_{n}\}\subset(0, 1)\) such that \(\liminf_{n\rightarrow\infty}\alpha _{n}(1-\alpha_{n})>0\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (4.1) converges weakly to an element of Γ.
Proof
Taking \(x^{*}\in\Gamma\), we have \(x^{*}\in C\cap \operatorname{Fix}(T)\) and \(Ax^{*}\in Q\cap \operatorname{Fix}(S)\). For simplicity, we write \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\) for all \(n\geq0\). Thus, we have \(y_{n}=P_{C}u_{n}\) for all \(n\geq0\). As is proven in Theorem 3.1,
and
Similarly, we have
From (2.2), (2.5), (4.1) and (4.3), we obtain that
It follows from the assumption of \(\{\lambda_{n}\}\) that
As the same argument of Theorem 3.1, the boundedness of the sequence \(\{ x_{n}\}\) yields our result.
Returning to (4.4), we have
Therefore, by the assumption of \(\{\alpha_{n}\}\), we have
and by the assumption of \(\{\lambda_{n}\}\), we have
Similarly, we have
Returning to (4.2), we have
From (4.5) and by the assumption of \(\{\lambda_{n}\}\), we have
So,
By setting \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\), it follows from (4.6) that
This together with (4.5) implies that
Therefore, all the conditions in Theorem 3.1 are satisfied. The conclusion of Theorem 4.1 can be obtained from Theorem 3.1 immediately. □
Remark 4.1
Theorem 4.1 improves, extends and develops [15], Theorem 3.6, [23], Theorem 3.2, [24], Theorem 3.1 and [25], Theorem 3.2 in the following aspects.
-
Theorem 4.1 extends the extra-gradient method due to Nadezhkina and Takahashi [24], Theorem 3.1.
-
The corresponding iterative algorithms in [15], Theorem 3.6 and [23], Theorem 3.2 are extended for developing our Mann-type extra-gradient iterative algorithm involved in pseudo-contractive mappings without Lipschitz assumption in Theorem 4.1.
-
The technique of proving weak convergence in Theorem 4.1 is different from those in [15], Theorem 3.6 and [23], Theorem 3.2 because our technique depends on the demiclosedness principle for pseudo-contractive mappings and bases on condition (2.5) in Hilbert spaces.
-
The problem of finding an element of Γ is more general than the problem of finding a solution of the SFP in [15], Theorem 3.6 and the problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(S)\) with \(S:C\rightarrow C\) being a nonexpansive mapping in [23], Theorem 3.2.
-
In Algorithm 3.1 of [25], Yao et al. proposed the following iterative algorithm:
$$\begin{aligned}& u_{n}=P_{C} \bigl(\alpha_{n}u+(1- \alpha_{n}) \bigl(x_{n}-\delta A^{*}(I-SP_{Q})Ax_{n} \bigr) \bigr), \\& x_{n+1}=(1-\beta_{n})u_{n}+\beta_{n}T \bigl((1-\gamma_{n})u_{n}+\gamma_{n}Tu_{n} \bigr), \quad n\geq0. \end{aligned}$$Via replacing the first iterative step by the extra-gradient method and replacing the second iterative step by the Mann-type iterative algorithm, we obtain the Mann-type extra-gradient iterative algorithm (4.1) in Theorem 4.1.
Utilizing Theorem 4.1, we have the following two new results in the setting of real Hilbert spaces.
Corollary 4.1
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(S:Q\rightarrow Q\) be a nonexpansive mapping and let \(T:C\rightarrow C\) be a continuous pseudo-contractive mapping. For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Mann-type iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{\|A\|^{2}} )\) and \(\{ \alpha_{n}\}\subset(0, 1)\) such that \(\liminf_{n\rightarrow\infty}\alpha _{n}(1-\alpha_{n})>0\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (4.7) converges weakly to an element of Γ.
Proof
Taking an \(x^{*}\in\Gamma\), we have \(x^{*}\in C\cap \operatorname{Fix}(T)\) and \(Ax^{*}\in Q\cap \operatorname{Fix}(S)\). For simplicity, we write \(u_{n}=x_{n}-\lambda_{n} A^{*}(I-SP_{Q})Ax_{n}\) for all \(n\geq0\). Thus, we have \(y_{n}=P_{C}u_{n}\) for all \(n\geq0\). Similarly to Theorem 4.1,
and
Similarly to Corollary 3.1,
Therefore, all the conditions in Theorem 4.1 are satisfied. The conclusion of Corollary 4.1 can be obtained from Theorem 4.1 immediately. □
Corollary 4.2
Let \(\mathcal{H}_{1}\) and \(\mathcal{H}_{2}\) be two real Hilbert spaces and let \(C\subset\mathcal{H}_{1}\) and \(Q\subset\mathcal{H}_{2}\) be two nonempty closed convex sets. Let \(A:\mathcal{H}_{1}\rightarrow\mathcal{H}_{2}\) be a bounded linear operator. Let \(T:C\rightarrow C\) be a continuous pseudo-contractive mapping such that \(\Gamma_{0}\cap \operatorname{Fix}(T)\neq\emptyset\). For \(x_{0}\in\mathcal{H}_{1}\) arbitrarily, let \(\{x_{n}\}\) be a sequence defined by the following Mann-type extra-gradient iterative algorithm:
where \(\{\lambda_{n}\}\subset (0, \frac{1}{\|A\|^{2}} )\) and \(\{ \alpha_{n}\}\subset(0, 1)\) such that \(\liminf_{n\rightarrow\infty}\alpha _{n}(1-\alpha_{n})>0\).
Then the sequence \(\{x_{n}\}\) generated by algorithm (4.8) converges weakly to an element of \(\Gamma_{0}\cap \operatorname{Fix}(T)\).
Remark 4.2
Corollary 4.2 improves, extends and develops [15], Theorem 3.6 and [23], Theorem 3.2 in the following aspects.
-
Compared with [23], Theorem 3.2, Corollary 4.2 is essentially coincident with [23], Theorem 3.2 whenever T is a nonexpansive mapping. Hence our Corollary 4.2 includes [23], Theorem 3.2 as a special case.
-
The problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(T)\) with \(T:C\rightarrow C\) being a pseudo-contractive mapping is more general than the problem of finding a solution of the SFP in [15], Theorem 3.6 and the problem of finding an element of \(\Gamma_{0}\cap \operatorname{Fix}(S)\) with \(S:C\rightarrow C\) being a nonexpansive mapping in [23], Theorem 3.2.
Example 4.1
[25]
Let \(\mathcal{H}=\mathbf{R}\) with the inner product defined by \(\langle x, y\rangle=xy\) for all \(x, y\in\mathbf{R}\) and the absolute-valued norm \(|\cdot|\). Let \(C=[0, +\infty)\) and \(Tx=x-1+\frac{4}{x+1}\) for all \(x\in C\). Obviously, \(\operatorname{Fix}(T)=3\). It is easy to see that
and
for all \(x, y\in C\). But
Thus, T is a Lipschitzian pseudo-contractive mapping but not a nonexpansive one.
The above example satisfies condition (2.5). Indeed, note that
for all \(x\in C\). Hence, we have
for all \(x\in C\).
So, it follows that
for all \(x\in C\). So, it is reasonable that we introduce condition (2.5) in Theorem 4.1. Thus, we can use condition (2.5) to replace the Lipschitz assumption of pseudo-contractive mappings when we study a split feasibility problem or other problems involved in pseudo-contractive mappings.
5 Numerical example
In this section, we consider the following example to illustrate the theoretical result.
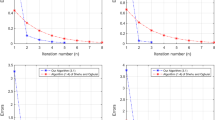
Let \(\mathcal{H}_{1}=\mathcal{H}_{2}=\mathbf{R}\) with the inner product defined by \(\langle x, y\rangle=xy\) for all \(x, y\in\mathbf{R}\) and the standard norm \(|\cdot|\). Let \(C=[0, +\infty)\) and \(Tx=x-1+\frac {4}{x+1}\) for all \(x\in C\). Let \(Q=\mathbf{R}\) and \(Sx=\frac{x}{3}+1\) for all \(x\in Q\). Let \(Ax=\frac{1}{2}x\) for all \(x\in\mathbf{R}\). Let \(\lambda_{n}=1\), \(\alpha_{n}=\frac{1}{7}\), \(\beta_{n}=\frac{1}{8}\). Let the sequence \(\{x_{n}\}\) be generated iteratively by (3.1), then the sequence \(\{x_{n}\}\) converges to 3.
Solution: It is easy to see that A is a bounded linear operator with its adjoint \(A^{*}=A\), \(\operatorname{Fix}(T)=3\) and \(\operatorname{Fix}(S)=\frac{3}{2}\). It can be observed that all the assumptions of Theorem 3.1 are satisfied. It is also easy to check that \(\Gamma=\{3\}\). We now rewrite (3.1) as follows:
Choosing initial values \(x_{0}=8\) and \(x_{0}=-2\) respectively, we see that figures (see Figures 1 and 2) and numerical results (see Tables 1 and 2) demonstrate Theorem 3.1.

The convergence of \(\pmb{\{x_{n}\}}\) with initial value 8.

The convergence of \(\pmb{\{x_{n}\}}\) with initial value −2.
References
Censor, Y, Elfving, T: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 8, 221-239 (1994)
Byrne, C: Iterative oblique projection onto convex subsets and the split feasibility problem. Inverse Probl. 18, 441-453 (2002)
Censor, Y, Bortfeld, T, Martin, B, Trofimov, A: A unified approach for inversion problems in intensity modulated radiation therapy. Phys. Med. Biol. 51, 2353-2365 (2006)
Censor, Y, Elfving, T, Kopf, N, Bortfeld, T: The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 6, 2071-2084 (2005)
Censor, Y, Motova, A, Segal, A: Perturbed projections and subgradient projections for the multiple-sets split feasibility problem. J. Math. Anal. Appl. 327, 1244-1256 (2007)
Byrne, C: A unified treatment of some iterative algorithm in signal processing and image reconstruction. Inverse Probl. 20, 103-120 (2004)
Qu, B, Xiu, N: A note on the CQ algorithm for the split feasibility problem. Inverse Probl. 21, 1655-1665 (2005)
Xu, HK: A variable Krasnosel’skii-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 22, 2021-2034 (2006)
Yang, Q: The relaxed CQ algorithm solving the split feasibility problem. Inverse Probl. 20, 1261-1266 (2004)
Zhao, J, Yang, Q: Several solution methods for the split feasibility problem. Inverse Probl. 21, 1791-1799 (2005)
Sezan, M, Stark, H: Applications of convex projection theory to image recovery in tomography and related areas. In: Stark, H (ed.) Image Recovery Theory and Applications, pp. 415-462. Academic Press, Orlando (1987)
Youla, D: Mathematical theory of image restoration by the method of convex projection. In: Stark, H (ed.) Image Recovery Theory and Applications, pp. 29-77. Academic Press, Orlando (1987)
Youla, D: On deterministic convergence of iterations of relaxed projection operators. J. Vis. Commun. Image Represent. 1, 12-20 (1990)
Combettes, P, Wajs, V: Signal recovery by proximal forward-backward splitting. Multiscale Model. Simul. 4, 1168-1200 (2005)
Xu, HK: Iterative methods for the split feasibility problem in infinite-dimensional Hilbert spaces. Inverse Probl. 26, 105018 (2010)
Yu, X, Shahzad, N, Yao, Y: Implicit and explicit algorithm for solving the split feasibility problem. Optim. Lett. 6, 1447-1462 (2012)
Wang, F, Xu, HK: Approximating curve and strong convergence of the CQ algorithm for the split feasibility problem. J. Inequal. Appl. 2010, Article ID 102085 (2010)
Ceng, LC, Petruşel, A, Yao, JC: Relaxed extragradient methods with regularization for general system of variational inequalities with constraints of split feasibility and fixed point problems. Abstr. Appl. Anal. 2013, Article ID 891232 (2013)
Yao, Y, Wu, J, Liou, Y: Regularized methods for the split feasibility problem. Abstr. Appl. Anal. 2012, Article ID 140679 (2012)
Ceng, LC, Ansari, QH, Yao, JC: Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 75, 2116-2125 (2012)
Yao, Y, Postolache, M, Liou, Y: Strong convergence of a self-adaptive method for the split feasibility problem. Fixed Point Theory Appl. 2013, Article ID 201 (2013)
Korpelevich, G: An extragradient method for finding saddle points and for other problems. Èkon. Mat. Metody 12, 747-756 (1976)
Ceng, LC, Ansari, QH, Yao, JC: An extragradient method for solving split feasibility and fixed point problems. Comput. Math. Appl. 64, 633-642 (2012)
Nadezhkina, N, Takahashi, W: Weak convergence theorem by an extragradient method for nonexpansive mappings and monotone mappings. J. Optim. Theory Appl. 128, 191-201 (2006)
Yao, Y, Agarwal, RP, Postolache, M, Liou, YC: Algorithms with strong convergence for the split common solution of the feasibility problem and fixed point problem. Fixed Point Theory Appl. 2014, Article ID 183 (2014)
Bertsekas, D, Gafni, E: Projection methods for variational inequalities with applications to the traffic assignment problem. Math. Program. Stud. 17, 139-159 (1982)
Han, D, Lo, H: Solving non-additive traffic assignment problems: a descent method for co-coercive variational inequalities. Eur. J. Oper. Res. 159, 529-544 (2004)
Zhou, H: Strong convergence of an explicit iterative algorithm for continuous pseudo-contractives in Banach spaces. Nonlinear Anal. 70, 4039-4046 (2009)
Kong, ZR, Ceng, LC, Wen, CF: Some modified extragradient methods for solving split feasibility and fixed point problems. Abstr. Appl. Anal. 2012, Article ID 975981 (2012)
Acknowledgements
This work was supported by the Innovation Program of Shanghai Municipal Education Commission (15ZZ068), PhD Program Foundation of the Ministry of Education of China (20123127110002) and Program for Shanghai Outstanding Academic Leaders in Shanghai City (15XD1503100).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Chen, JZ., Ceng, LC., Qiu, YQ. et al. Extra-gradient methods for solving split feasibility and fixed point problems. Fixed Point Theory Appl 2015, 192 (2015). https://doi.org/10.1186/s13663-015-0441-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13663-015-0441-z