
Abstract
In this study, the double Laplace Adomian decomposition method and the triple Laplace Adomian decomposition method are employed to solve one- and two-dimensional time-fractional Navier–Stokes problems, respectively. In order to examine the applicability of these methods some examples are provided. The presented results confirm that the proposed methods are very effective in the search of exact and approximate solutions for the problems. Numerical simulation is used to sketch the exact and approximate solution.
Similar content being viewed by others


1 Introduction
Fractional partial differential equations as generalizations of classical partial differential equations, and they have been proposed and applied to many applications in various fields of physical sciences and engineering such as electromagnetic, acoustics, visco-elasticity and electro-chemistry. Recently, the solution of fractional partial differential equations has been obtained through a double Laplace decomposition method by the authors [1–3]. The natural transform decomposition method has been successfully used to handle linear and nonlinear problems appearing in physical and engineering disciplines [4, 5]. The Navier–Stokes equations are the fluid dynamics identical to Newton’s second law, force equals mass times acceleration, and they are of crucial significance in fluid dynamics. Also the Navier–Stokes equations are vector equations. Recently, many powerful methods have been used to obtain different type solution of time-fractional Navier–Stokes equation such as the Adomian decomposition method [6], the q-homotopy analysis transform scheme [7], the modified Laplace decomposition method [8, 9], the natural homotopy perturbation method [10] and a reliable algorithm based on the new homotopy perturbation transform method [11]. The one-dimensional Navier–Stokes equation with time-fractional derivative has been given in operator form [12]. The main objective of this work is to find the exact and approximate solution of time-fractional Navier–Stokes equations by using the double and triple Laplace Adomian decomposition methods, respectively.
2 Basic definitions and preliminaries concepts
In this section, we give some essential definitions, properties and theorems of fractional calculus and double Laplace transform, which should be used in the present study.
Definition 1
In [13] Let f be a function of three variables x, y and t, where \(x,y,t>0\). The triple Laplace transform of f is defined by
where p, q, s are complex variables, and further triple Laplace transforms of the partial derivatives are shown by
Likewise, the triple Laplace transform for the second partial derivative with respect to x, y and t are defined by
The inverse triple Laplace transform \(L_{p}^{-1}L_{q}^{-1}L_{s}^{-1} [ F ( p,q,s ) ] =f(x,y,t)\) is defined [13] as follows:
Definition 2
The Caputo time-fractional derivative operator of order \(\alpha >0\) is determined by
In the next theorem, one can introduce the triple Laplace transform of the partial fractional Caputo derivatives.
Theorem 1
([17])
Let \(\alpha , \beta ,\gamma >0\), \(n-1<\alpha \leq n\), \(m-1<\beta \leq m\), \(r-1<\gamma \leq r\)and \(n,m,p\in \mathbb{N} \), so that \(f\in C^{l} ( \mathbb{R} ^{+}\times \mathbb{R} ^{+}\times \mathbb{R} ^{+} ) \), \(l=\max \{n,m,p\}\), \(f^{ ( l ) }\in L_{1} [ ( 0,a ) \times ( 0,b ) \times ( 0,c ) ] \)for any \(a,b,c >0\), \(\vert f(x,y,t) \vert \leq we^{x\tau _{1}+y\tau _{2}+t \tau _{3}}\), \(x >a>0\), \(y>b>0\)and \(t>c>0\)the triple Laplace transforms of Caputo’s fractional derivatives \(D_{t}^{\alpha }u(x,y,t)\), \(D_{t}^{\alpha }u(x,y,t)\)and \(D_{t}^{\alpha }u(x,y,t)\)are defined by
and
In the following part, the relations between Mittag-Leffler function and Laplace transform are considered, which are helpful in the in the current study. The Mittag-Leffler function is defined by the following series:
the Mittag-Leffler function with two parameters is defined by
see [18, 19]. If we put \(\beta =1\) in Eq. (2.5) we obtain Eq. (2.4). It follows from Eq. (2.5) that
and
in general
Triple Laplace transforms of some Mittag-Leffler functions are given by
3 Analysis of the double Laplace decomposition method
In this secction, we give the essential idea of the double Laplace Adomian decomposition method (DLADM) for the time-fractional Navier–Stokes equations. With a view to showing the fundamental scheme of the double Laplace Adomian decomposition method, we consider the following time-fractional Navier–Stokes equations:
subject to the condition
where \(D_{t}^{\alpha }=\frac{\partial ^{\alpha }}{\partial t^{\alpha }}\) is the fractional Caputo derivative, \(D_{x}^{2}= \frac{\partial ^{2}}{\partial x^{2}}\), \(D_{x}=\frac{\partial }{\partial x} \) and the right-hand-side function \(f(x,t)\) is the source term. In order to apply the double Laplace Adomian decomposition method, we multiply first Eq. (3.1) by x, we obtain
implementing the double Laplace transform on both sides of Eq. (3.2), we have
by using Theorem 1, we get
Immediately, implementing the differentiation property of the Laplace transform, we get
after an algebraic manipulation, we obtain
By taking the integral for both sides of Eq. (3.5) from 0 to p with respect to p, we get
the double Laplace Adomian decomposition solution \(u(x,t)\) is defined by the following infinite series:
by substituting Eq. (3.7) into Eq. (3.6), we get
by using DLADM, we introduce the iterative relations
and the remaining components can be written as
Hence, \(u_{0} ( x,t ) \) and \(u_{m} ( x,t ) \) can be obtained by applying the inverse double Laplace transform to Eqs. (3.9) and (3.10), respectively, and we have
and
where \(L_{x}L_{t}\) is the double Laplace transform with respect to x, t and the double inverse Laplace transform denoted by \(L_{p}^{-1}L_{s}^{-1}\) is with respect to p, s. We supposed that the double inverse Laplace transform exists for Eqs. (3.11) and (3.12).
4 Analysis of the triple Laplace decomposition method
In this part of the paper, we give the fundamental idea of the triple Laplace Adomian decomposition method (TLADM) for the two-dimensional time-fractional Navier–Stokes equations. In order to show the fundamental plan of the triple Laplace Adomian decomposition method, we consider the following system of two-dimensional time-fractional Navier–Stokes equations:
subject to
where \(D_{t}^{\alpha }=\frac{\partial ^{\alpha }}{\partial t^{\alpha }}\) is the fractional Caputo derivative, r is the pressure; in addition if r is known, then \(h_{1}= \frac{1}{\rho }\frac{\partial r}{\partial x}\) and \(h_{2}=-\frac{1}{\rho }\frac{\partial r}{\partial y}\). Applying the triple Laplace transform for Eq. (4.1), we obtain
On using the differentiation property of the Laplace transform, we get
By applying the triple inverse Laplace transformation for Eq. (4.3), we get
the solutions \(u(x,y,t)\) and \(v(x,y,t)\) are defined by the following series:
moreover, the nonlinear terms \(uu_{x}\), \(vu_{y}\), \(uv_{x}\) and \(vv_{y}\) are determined by
by substituting Eq. (4.5) into Eq. (4.3), we get
and
Taking the inverse Laplace transformation to Eqs. (4.7) and (4.8) we have
and
by using DLADM, we introduce the recursive relations
and the remaining components \(u_{n+1}\) and \(v_{n+1}\), \(n\geq 0\) are given by
and
where \(L_{x}L_{y}L_{t}\) is the triple Laplace transform with respect to x, y, t and triple inverse Laplace transform denoted by \(L_{p}^{-1}L_{q}^{-1}L_{s}^{-1}\) is with respect to p, q, s. We assume that the triple inverse Laplace transform with respect to p, q and s exist for Eqs. (4.11), (4.12) and (4.13).
5 Numerical examples
In this part of paper, we discuss the achievement of our present methods and examine its accuracy by using the decomposition method with connection of the Laplace transform. Three problems are given.
Problem 1
Consider the homogeneous one-dimensional motion of a viscous fluid in a tube given by
subject to the initial condition
One can write Eq. (5.1) in the form
where \(K= -\frac{\partial r}{\rho \partial z}\), multiplying the above equation with x, we have
Implementing the double Laplace transform on both sides of Eq. (5.4), we get
using the differentiation property of the Laplace transform and Theorem 1, we obtain
substituting the initial condition and arranging Eq. (5.6), we have
by integrating both sides of Eq. (5.7) from 0 to p with respect to p, we have
The inverse double Laplace transform of Eq. (5.8) is denoted by
we assume an infinite series solution of the unknown function \(u(x,t)\) is given by
substituting Eq. (5.10) into Eq. (5.9), we get
The zeroth component \(u_{0}\) is proposed by Adomian method, is constantly contains initial condition and the nonhomogeneous term, both of which are assumed to be known. Accordingly, we put
The remaining components \(u_{m+1}\), \(m\geq 0\) are given by using the relation
by substituting \(m=0\), into Eq. (5.12), we get
similarly at \(m=1\),
at \(m=2\), we have
Hence, the solution of Eq. (5.1) can be can be found to be
The result is the same as given by [6, 10].
Problem 2
The nonhomogeneous time-fractional Navier–Stokes equation
subject to the initial condition
Applying the double Laplace transform on both sides of Eq. (5.15), subject to the initial condition Eq. (5.16), we have
Working with the double Laplace inverse on both sides of Eq. (5.17) gives
By using the above-mentioned method the solution of Eq. (3.7), is given by
the first few terms of the double Laplace decomposition series are given by
and
Hence, at \(m=0\), we get
In the same manner,
and
The series solution is therefore given by
where E denotes the Mittag-Leffler function. On setting \(\alpha =1\) in Eq. (5.15), we get the exact solution of the non-time-fractional Navier–Stokes equation
under the same condition \(u ( x,0 ) =x^{2}\). The solution is given by
In the following problem, the suggested method is applied to the two-dimensional time-fractional model of the Navier–Stokes equation, in Eq. (5.20). We let \(h_{1}=\frac{1}{\rho }\frac{\partial r}{\partial x} =- h_{2}=-\frac{1}{\rho }\frac{\partial r}{\partial y}=h\) as follows.
Problem 3
Consider the time-fractional order two-dimensional Navier–Stokes equation [9, 13]
subject to the condition
by taking the triple Laplace transform for both sides of Eq. (5.20), we get
on using the differentiation property of the Laplace transform, we have
substituting the initial condition and arranging Eq. (5.21), we have
Now, implementing the inverse triple Laplace transform for Eq. (5.22)
The zeroth components \(u_{0}\) and \(v_{0}\) are found by the Adomian method. Always it contains initial condition and the source term, both of which are assumed to be known. Accordingly, we set
The remaining components \(u_{n+1}\), \(u_{n+1}\), \(n\geq 0\) are given by using the relations
and
the first few terms of the Adomian polynomials \(A_{n}\), \(B_{n}\), \(C_{n}\) and \(D_{n}\) are given by
by putting \(n=0\), into Eqs. (5.24) and (5.25), we get
in the same way, we have
similarly at \(n=1\),
and
at \(n=2\), we have
and
In the same manner, we have
The solution of Eq. (5.20) is given by
at \(\alpha =1\) and \(h=0\), we obtain the exact solution of the classical Navier–Stokes equation for the velocity:
6 Numerical result
In this section, we clarify the accuracy and efficiency of the double Laplace Adomian decomposition method by numerical results of \(u(x,t)\) for the exact solution when \(\alpha =1\) and approximate solutions with α using different fractional values for the time-fractional Navier–Stokes equation. The solutions of Eqs. (5.1) and (5.15) are represented through Figs. 1–4, respectively.

Plot of \(u(r,t)\) vs. r, for problem (1), when \(k=v=t=1\) for different values of α
Figure 1 compares the approximate solutions of Eq. (5.1) at \(t=1\). It shows that besides the approximate solution at \(\alpha =1\) we get the exact solution, and the function \(u(x,t)\) decreases as the fractional derivative decreases at \(\alpha =0.75,0.50,0.25\).
The three-dimensional surface in Fig. 2(a) shows the solution of Eqs. (5.1) at (\(\alpha =0.5\)) and Fig. 2(b) shows the exact solution of the time-fractional Navier–Stokes equation with \(\alpha =1\) in normal form.

The surface shows the solution \(u(r,t)\) for problem (1), when \(k=v=1\). (a) \(\alpha =0.5\); (b) \(\alpha =1\)
In the same manner, the exact solution and approximate solution of Eq. (5.15) were demonstrated in Figs. 3 and 4. Figures 3 gives plots of the behavior of Eq. (5.15) when \(t=1\) and \(\alpha =0.75,0.50,0.25\), in this case the function \(u(x,t)\) increases quickly and gets far from the exact solution.

Plot of \(u(r,t)\) vs. r, for problem (2), when \(k=v=t=1\) for different values of α

The surface shows the solution \(u(r,t)\) for problem (2), when \(k=v=1\). (a) \(\alpha =0.5\); (b) \(\alpha =1\)
The three-dimensional surface in Fig. 4(a) shows the solution of Eqs. (5.15) at (\(\alpha =0.5\)) and Fig. 4(b) shows the exact solution of the time-fractional Navier–Stokes equation at \(\alpha =1\) in standard form equal to \(x^{2}e^{t}\).
It is clear from the solutions of Eqs. (5.1) and (5.15) that the double Laplace transform decomposition method shows good agreement with the exact solutions of the problems.
Figure 5 consists of two graphs, namely Fig. 5(a) and Fig. 5(b). Figures 5(a) and 5(b) represent the functions \(u(x,y,t)\) and \(u(x,y,t)\) of the Navier–Stokes equation, respectively, of Eq. (5.20) when \(\rho =0.5\), \(\alpha =0.5\) and \(t=0.5\).

The surface shows the solution for problem (3), when \(\rho =0.5\), \(\alpha =0.5\) and \(t=0.5\)
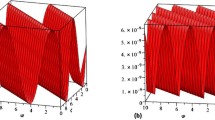
Figure 6 consists of two graphs, namely Fig. 6(a) and Fig. 6(b). Figures 6(a) and 6(b) represent the functions \(u(x,y,t)\) and \(u(x,y,t)\) of the Navier–Stokes equation, respectively, of Eq. (5.20) when \(\rho =0.5\), \(\alpha =0.5\) and \(t=0.05\).

The surface shows the solution for problem (3), when \(\rho =0.5\), \(\alpha =0.5\) and \(t=0.05\)
Conclusion 1
In this work, double and triple Laplace Adomian decomposition methods are suggested for solving one- and two-dimensional time-fractional Navier–Stokes equations. These methods have been proved to be a powerful tool which enable us to manage fractional order differential equations and allow one to reach the desired accuracy. All we have to do is to increase the number of iterations. Therefore, it can be found that DLADM and TLADM are very effective in the search of exact and numerical solutions for the fractional Navier–Stokes equation.
References
Eltayeb, H., Bachar, I., GadAllah, M.: Solution of singular one-dimensional Boussinesq equation by using double conformable Laplace decomposition method. Adv. Differ. Equ. 2019, 293 (2019). https://doi.org/10.1186/s13662-019-2230-1
Eltayeb, H., Bachar, I., Kılıçman, A.: On conformable double Laplace transform and one dimensional fractional coupled Burgers’ equation. Symmetry 11(3), 417 (2019). https://doi.org/10.3390/sym11030417
Eltayeb, H., Mesloub, S., Abdalla, Y.T., Kılıçman, A.: A note on double conformable Laplace transform method and singular one dimensional conformable pseudohyperbolic equations. Mathematics 7(10), 949 (2019). https://doi.org/10.3390/math7100949
Eltayeb, H., Abdalla, Y.T., Bachar, I., Khabir, M.H.: Fractional telegraph equation and its solution by natural transform decomposition method. Symmetry 11(3), 334 (2019). https://doi.org/10.3390/sym11030334
Eltayeb, H.: Application of double natural decomposition method for solving singular one dimensional Boussinesq equation. Filomat 32(12), 4389–4401 (2018)
Momani, S., Odibat, Z.: Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Appl. Math. Comput. 177, 488–494 (2006)
Prakash, A., Prakasha, D.G., Veeresha, P.: A reliable algorithm for time-fractional Navier–Stokes equations via Laplace transform. Nonlinear Eng. 8, 695–701 (2019)
Kumar, S., Kumar, D., Abbasbandy, S., Rashidi, M.M.: Analytical solution of fractional Navier–Stokes equation by using modified Laplace decomposition method. Ain Shams Eng. J. 5, 569–574 (2014)
Mahmood, S., Shah, R., Khan, H., Arif, M.: Laplace Adomian decomposition method for multi dimensional time fractional model of the Navier–Stokes equation. Symmetry 11(2), 149 (2019). https://doi.org/10.3390/sym11020149
Maitama, S.: Analytical solution of time-fractional Navier–Stokes equation by natural homotopy perturbation method. Prog. Fract. Differ. Appl. 4(2), 123–131 (2018)
Kumar, D., Singh, J., Kumar, S.: A fractional model of the Navier–Stokes equation arising in unsteady flow of a viscous fluid. J. Assoc. Arab Univ. Basic Appl. Sci. 17, 14–19 (2015)
Wang, K., Liu, S.: Analytical study of time-fractional Navier–Stokes equations by transform methods. Adv. Differ. Equ. 2016, 61 (2016)
Singh, B., Kumar, P.: FRDTM for numerical simulation of multi-dimensional, time-fractional model of the Navier–Stokes equation. Ain Shams Eng. J. 9, 827–834 (2016)
Mohebbi Ghandehari, M.A., Ranjbar, M.: A numerical method for solving a fractional partial differential equation through converting it into an NLP problem. Comput. Math. Appl. 65, 975–982 (2013)
Bayrak, M.A., Demir, A.: A new approach for space-time fractional partial differential equations by residual power series method. Appl. Math. Comput. 336, 215–230 (2018)
Hayman, T., Kendre, S.: Analytical solutions for conformable space-time fractional partial differential equations via fractional differential transform. Chaos Solitons Fractals 109, 238–245 (2018)
Khan, A., Khan, A., Khan, T., Zaman, G.: Extension of triple Laplace transform for solving fractional differential equations. Discrete Contin. Dyn. Syst., Ser. S 13(3), 755–768 (2020). https://doi.org/10.3934/dcdss.2020042
Mainardi, F., Gorenflo, R.: On Mittag-Leffler-type functions in fractional evolution processes. J. Comput. Appl. Math. 118, 283–299 (2000)
Mainardia, F., Gorenob, R.: On Mittag-Leffler-type functions in fractional evolution processes. J. Comput. Appl. Math. 118, 283–299 (2000)
Acknowledgements
Not applicable.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
The authors would like to extend their sincere appreciation to the Deanship of Scientific Research at King Saud University for its funding this Research group No (RG-1440-030).
Author information
Authors and Affiliations
Contributions
The authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Eltayeb, H., Bachar, I. & Abdalla, Y.T. A note on time-fractional Navier–Stokes equation and multi-Laplace transform decomposition method. Adv Differ Equ 2020, 519 (2020). https://doi.org/10.1186/s13662-020-02981-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02981-7