
Abstract
This paper is concerned with the asymptotic stability of linear fractional-order neutral delay differential–algebraic systems described by the Caputo–Fabrizio (CF) fractional derivative. A novel characteristic equation is derived using the Laplace transform. Based on an algebraic approach, stability criteria are established. The effect of the index on such criteria is analyzed to ensure the asymptotic stability of the system. It is shown that asymptotic stability is ensured for the index-1 problems provided that a stability criterion holds for any delay parameter. Also, asymptotic stability is still valid for higher-index problems under the conditions that the system matrices have common eigenvectors and each pair of such matrices is simultaneously triangularizable so that a stability criterion holds for any delay parameter. An example is provided to demonstrate the effectiveness and applicability of the theoretical results.
Similar content being viewed by others

1 Introduction
Fractional calculus is attracting more and more researchers in applied sciences and engineering because of the many advantages of fractional derivatives which provide important tools in mathematical modeling related to many interdisciplinary areas, see, e.g., [20–28, 34, 40]. Any physical system can be represented more accurately through a fractional system. Also it has been found that it is more appropriate to capture the real dynamical behavior rather than classical calculus. It should be pointed out that fractional calculus has gained the popularity due to its peculiar properties and recent progress of research in this area. For more details, one can see [3, 5, 10, 12, 41]. There are different types of fractional derivatives, those of Riemann–Liouville and Caputo are the most popular in the literature [4, 19, 32, 37, 39].
In their recent work, Caputo and Fabrizio [7] introduced a new fractional-order derivative with a nonsingular kernel, hereinafter called the fractional Caputo–Fabrizio (CF) derivative. This new fractional derivative is less affected by the past compared to the Caputo fractional derivative, which may exhibit slow stabilization [1, 33]. The properties and numerical aspects of the CF derivative and their corresponding fractional integrals been studied in [2, 6, 8, 11, 18, 30, 38]. In this paper, we are interested in linear fractional-order neutral delay differential–algebraic equations described by the CF derivative. The presence of differential and difference operators as well as the algebraic constraints makes the study of such equations more complicated than that for standard fractional delay differential equations or fractional delay algebraic equations. For this reason, recently, a great attention has been paid to fractional delay differential–algebraic systems. One of the most important research topics of the theory of such systems is the stability analysis. However, in the literature cited above, there are only few results (see, e.g., [16, 17, 35, 36]) on this topic. The stability of such systems has some particular properties including regularity behavior and the index which is a very important characteristic of fractional delay differential–algebraic equations but which does not need to be considered in standard differential systems. Most of the considered fractional delay differential–algebraic systems, so far, are of index one (impulse-free). However, if the index is other than one then classical results on stability fail for fractional delay differential–algebraic equation. So this paper aims to make some contribution to fill this research gap. In [29] the authors consider the asymptotic stability of linear fractional-order ordinary differential equations described by the CF derivative, whereas the authors of [31] consider the stability analysis of a linear fractional-order system with time delay, establish a characteristic equation using the Laplace transform, and provide some brief sufficient stability conditions. While being different, we extend the analysis carried out in the above cited references. We apply a spectrum-based approach to establish asymptotic stability criteria for fractional-order neutral delay differential–algebraic equations, and the novelty of this work lies in the following aspects. Firstly, the CF definition of the fractional derivative is applied to analyze linear fractional-order differential–algebraic systems including neutral time delay and singular coefficient matrices. Secondly, by using the Laplace transform, we establish a novel characteristic equation. Thirdly, we apply an algebraic approach to establish sufficient asymptotic stability criteria ensuring that all the roots of characteristic equation lie in open left half of the complex plane. Fourthly, we extend the asymptotic stability results to a broader class of linear systems which are regular, not impulse-free, and with a non-commutative family of matrices. We consider such systems with simultaneously triangularizable matrices, where the condition on simultaneous triangularization of a pair of matrices can be extended so that the rank of their commutator is less than or equal to one. A nice consequence is that these stability criteria avoid solving the characteristic (transcendental) equation.
The rest of the paper is organized as follows: In Sect. 2 we formulate the problem and introduce notation that will be used throughout the paper. In Sect. 3 we establish the main results for the asymptotic stability criteria for fractional neutral delay differential–algebraic equations. In Sect. 4 we provide an example to illustrate the effectiveness and applicability of the proposed criteria. Finally, some concluding remarks are given in Sect. 5.
2 Problem formulation and notations
We consider the linear fractional-order neutral delay differential–algebraic equations (FNDDAEs):
where \(0< \alpha <1\), \(y ( t )\) is a real vector of size n (the state vector); A, B, C, E are real constant matrices of size \(n \times n\), and E is assumed to be singular with \(\operatorname{rank} ( E )= r < n\); the positive pareameter τ is the time delay and φ is a consistent initial function. The notation \({}^{\mathrm{CF}} D^{\alpha } y ( t )\) stands for Caputo–Fabrizio fractional-order derivative of order α of y(t) defined by (see [7])
where \(\dot{y} ( \tau ) = \frac{dy ( \tau )}{dt}\).
The following notations will be used throughout the paper. For a complex matrix X, \(\det [ X ]\), \(\sigma [ X ]\), \(\Vert X \Vert \), and \(\rho [ X ]\) denote respectively its determinant, spectrum, spectral norm, and spectral radius. The open left half complex plane is denoted by \(C^{-}\). The symbol \(\mathcal{L}\) denotes the Laplace transform.
3 Main results
Applying the Laplace transform to (1), we obtain
We have
and
Then (2) leads to
and after rearrangement to
Setting \(y_{0} ( s ) = ( E - C e^{- s\tau } ) y ( 0 )\), we get
where
Since the distribution of eigenvalues of \(P ( s )\) totally determines the stability of system (1), the following definition is obvious.
Definition 3.1
The characteristic equation of system (1) is
where \(P ( s ) = s ( E - C e^{- s\tau } - ( 1- \alpha ) ( A + B e^{- s\tau } ) ) - \alpha ( A + B e^{- s\tau } ) \).
Definition 3.2
The zero solution \(y ( t )=0\) of system (1) is called asymptotically stable if for any consistent \(\varphi (\cdot)\in \mathcal{C} ( [ - \tau ,0 ], R^{n} )\) its analytic solution \(y ( t )\) satisfies \(\lim_{t \rightarrow +\infty } y ( t ) =0\) for any delay paramerter \(\tau >0\).
Now we establish several stability theorems. Multipling s on both sides of (3) gives \(P ( s ) ( sY ( s ) ) = s y_{0} ( s ) \).
Similar to that given in [42], if all roots of the transcendental equation \(\det [ P ( s ) ] =0\) lie in open left half of the complex plane, i.e., \(\operatorname{Re} ( s ) <0\), then we consider this equation in \(\operatorname{Re}(s)\geq 0\). In this restricted area, it has a unique solution \(sY ( s ) \). So, we have \(\lim_{ \substack{ s \rightarrow 0\\ \operatorname{Re}(s)\geq 0 }} sY ( s ) =0\). From the assumption of all roots of the characteristic equation \(Q ( s, \tau ) = \det [ P ( s ) ] =0\) and the final-value theorem of the Laplace transform, and according to Definition 3.2 we get \(\lim_{t \rightarrow +\infty } y ( t ) = \lim_{ \substack{ s \rightarrow 0\\ \operatorname{Re}(s)\geq 0 }} sY ( s ) =0\). It immediately follows the theorem below.
Theorem 3.1
System (1) is asymptotically stable if all the roots of characteristic equation \(Q ( s, \tau ) = \det [ P ( s ) ] =0\), where \(P ( s ) = s ( E - C e^{- s\tau } - ( 1- \alpha ) ( A + B e^{- s\tau } ) ) - \alpha ( A + B e^{- s\tau } )\), lie in open left half of the complex plane and are uniformly bounded away from the imaginary axis.
3.1 Solvability analysis of linear FNDDAEs
There is one well-known fact in the theory of delay algebraic equations that not only the stability of system (1) depends on spectral conditions but also the solvability is connected to the regularity of the matrix pair \(( E, A )\). Consequently, the solvability of FNDDAEs (1) is discussed under the regularity of the matrix pair \(( E, A )\).
Definition 3.3
Consider system (1) described by the CF derivative with the family of matrices \(\{ E, A, B, C \} \) in \(R^{n \times n}\)
-
1.
The pair \(( E, A )\) is known as regular if \(\det ( sE - A )\) is not identically zero, where \(s \in C \), and system (1) is known as regular if the pair \(( E, A )\) is regular.
-
2.
The pair \(( E, A )\) is known as impulse-free if \(n_{1} = \operatorname{rank} ( E )\), where \(n_{1} = \operatorname{deg} [ \det ( sE - A ) ]\). System (1) is known as impulse-free if the pair \(( E, A )\) is impulse-free.
Definition 3.4
An initial function φ is called consistent with system (1) if the associated initial value problem IVP (1) has at least one solution. System (1) is called solvable (resp. regular) if, for every consistent initial function φ, the associated IVP has a solution (resp. has a unique solution).
Definition 3.5
([13] (Quasi-Weierstrass form))
The matrix pencil \(( E, A )\) is regular if and only if there exist matrices P, Q in \(R^{n \times n}\) such that
where N is a nilpotent with index of nilpotency v and \(J \in R^{r \times r}\) is a matrix in Jordan canonical form. If \(n - r >0\), we call v the index of the pencil \(( E, A )\) and write \(\operatorname{ind} ( E, A )= v\). Otherwise we set \(\operatorname{ind} ( E, A )=0\).
Remark 3.1
If \(n_{1} = r\), then the pair \(( E, A )\) is of index one (impulse-free).
Remark 3.2
The regularity of the pair \(( E, A )\) ensures that system (1) with \(\tau \neq 0\) is regular, and it further ensures the existence of a unique solution to system (1) on \([ 0, \infty ) \).
Now, according to [9] and by applying the method of steps, we obtain the following lemma which generalizes the results of fractional-order differential–algebraic system without delay described by the CF derivative to fractional-order neutral delay differential–algebraic system (1).
Lemma 3.1
Assume that \(( E, A )\)is regular and \(\varphi (\cdot)\in C^{1} ( [ \tau , 0 ], R^{n} )\)is the consistent and sufficiently smooth initial function, then system (1) is uniquely solvable on \([ 0, +\infty ) \).
Proof
For system (1), on the interval \([ - \tau , 0 ]\), \(y ( t ) = \varphi ( t ) \).
Thus, when \(t \in [ 0, \tau ] \), system (1) is given by
that is,
Since \(( E, A )\) is regular, and \(B\varphi ( t - \tau ) + C {}^{\mathrm{CF}} D^{\alpha } [ \varphi ( t - \tau ) ]\) is continuous on \([ 0, \tau ]\), according to [9], we obtain that \(y_{1} ( t )\) is a unique solution of system (1) on \([ 0, \tau ] \).
For \(t \in [ \tau , 2 \tau ]\), system (1) is given by
that is,
Since \(B y_{1} ( t - \tau ) + C {}^{\mathrm{CF}} D^{\alpha } [ y_{1} ( t - \tau ) ]\) is continuous on \([ \tau ,2 \tau ]\), similarly, we obtain that \(y_{2} ( t )\) is a unique solution of system (1) on \([ \tau ,2 \tau ] \).
Assume that system (1) has a unique solution \(y_{k} ( t )\) on \([ ( k -1 ) \tau , k\tau ]\). For \(t \in [ k\tau ,( k +1) \tau ]\), system (1) is given by
that is,
Since \(B y_{k} ( t - \tau ) + C {}^{\mathrm{CF}} D^{\alpha } [ y_{k} ( t - \tau ) ]\) is continuous on \([ k\tau ,( k +1) \tau ]\), similarly, we obtain that \(y_{k +1} ( t )\) is a unique solution of system (1) on \([ k\tau ,( k +1) \tau ] \).
According to the mathematical induction, we can conclude that system (1) has a unique solution on \([ 0, +\infty ) \). □
3.2 Algebraic analysis criteria for linear FNDDAEs
In this section, stability criteria are given based on an algebraic approach. In order to obtain the main results, we introduce the equivalent form of system (1) by means of the nonsingular transform. Assume that \(( E, A )\) is regular, then according to Definition 3.5 there exist two nonsingular matrices \(P, Q\) in \(R^{n \times n}\) such that system (1) is equivalent to a canonical system as follows:
where \(0< \alpha <1\); \(y_{1} ( t ) \in R^{r}\); \(y_{2} ( t ) \in R^{n - r}\); N is nilpotent of index v and
Remark 3.3
In particular, if N is a zero matrix, then \(v =1\), i.e., \(\operatorname{ind} ( E, A )=1\).
The stability of (1) and (4) is equivalent, so we might as well let
or in particular case (when \(\operatorname{ind} ( E, A )=1\))
in system (1).
Algebraic stability criteria are given in the following lemma.
Lemma 3.2
Consider system (1) described by CF derivative with the family of matrices \(\{ E, A, B, C \} \)defined in (5). If the following conditions are satisfied:
Or
Then, for all \(s \in C\)such that \(\operatorname{Re} ( s ) \geq 0\), we have
Proof
To simplify the notation, let us denote
Condition \(( C_{2} )\) can then be written \(\sup_{\operatorname{Re}(s)\geq 0} \rho [ K ] < \frac{1}{2}\).
We have
Condition \(( C_{1} )\) ensures that \(s\gamma ( E - C ) - ( A + B )\) is nonsingular and condition \(( C_{2} )\) ensures that \(\rho [ K ( e^{- s\tau } -1 ) ]<1\) and hence \(I - K ( e^{- s\tau } -1 )\) is nonsingular. Therefore, \(( C_{3} )\) is satisfied.
Also, let us denote
Condition \(( \tilde{C_{2}} )\) can then be written \(\sup_{\operatorname{Re}(s)\geq 0} \rho [ L ] <1\).
We have
Condition \(( \tilde{C_{1}} )\) ensures that \(s\gamma E - A\) is nonsingular and condition \(( \tilde{C_{2}} )\) ensures that \(\rho [ L e^{- s\tau } ]<1\) and hence \(I - L e^{- s\tau } \) is nonsingular. Therefore, \(( C_{3} )\) is satisfied. □
Remark 3.4
Note that condition \(( C_{3} )\) in Lemma 3.2 is transcendental inequality, which is difficult to use, and since condition \(( C_{2} )\) implies that
by applying the algebraic criteria \(( C_{2}' )\), one can avoid solving the roots of transcendental equation, which is very convenient to check the stability of system (1).
Remark 3.5
Since the spectral radius of a matrix is always less than or equal to any induced norm of the matrix, Lemma 3.2 remains valid under condition \(( C_{1} )\) or \(( \tilde{C_{1}} )\) and
or
respectively.
3.3 Asymptotic stability of linear FNDDAEs when \(\operatorname{ind}(E, A)\geq 1\)
In this section, an attempt to analyze the effect of the index of \(( E, A )\) on the second criterion \(( C_{2} )\) or \(( \tilde{C_{2}} )\) isgiven to ensure the asymptotic stability of system (1) for any delay parameter.
Under assumption \(( C_{1} )\) or \(( \tilde{C_{1}} ) \), sometimes it is more convenient to check assumption \(( C_{2} ) \) or \(( \tilde{C_{2}} ) \) by using an operator norm instead of spectral radius, i.e., using assumption \(( C_{2}^{*} )\) or \(( C_{2}^{**} )\). For the sake of simplicity, if \(C = 0\) and from this point of view, a somewhat simpler condition can be given instead of \(( \tilde{C_{2}} )\) or \(( C_{2}^{**} )\) for explaining the effect of the index of \(( E, A )\) on the asymptotic stability of system (1).
Proposition 3.1
Under assumption \(( \tilde{C_{1}} )\), if the family of system matrices \(\{ E, A, B, C \} \)with \(C = 0\)satisfies the condition
Then system (1) is asymptotically stable.
Proof
\(( C_{2}^{***} )\) implies \(( \tilde{C_{2}} ) \). See also [15]. □
Unfortunately, if the index of \(( E, A )\) is greater than 1, then the right-hand side of \(( C_{2}^{***} )\) is simply zero, and the proposition does not apply. This once again confirms that for high-index problems, the coefficient matrices C and B must be highly structured so that the asymptotic stability would be preserved. So we first restrict the investigation of the algebraic criteria for the asymptotic stability to index-1 problems.
-
(a)
The index-1 case (\(\operatorname{ind} ( {E}, {A} ) ={1}\))
Sufficient conditions for asymptotic stability of system (1) are given in the following theorem with special case when the index of \(( E, A )\) is 1.
Theorem 3.2
Consider system (1) described by CF derivative with the family of matrices \(\{ E, A, B, C \} \)defined in (6). If the following conditions are satisfied:
Or
Then system (1) is asymptotically stable for all values of the delay τ.
Proof
By Lemma 3.2, if conditions \(( C_{1} )\) and \(( C_{2} )\) are satisfied, then condition \(( C_{3} )\) holds. This implies that Re(s) < 0 for any root of the characteristic equation \(Q ( s, \tau )\). We need to prove that the roots remain bound away from the imaginary axis. Suppose the contrary, then there exists a sequence of roots \(\{ s_{n} \} \) of the characteristic equation \(Q ( s, \tau )\) whose \(\operatorname{Re} ( s_{n} ) <0\) and \(\operatorname{Re} ( s_{n} )\rightarrow 0\) as \(n \rightarrow +\infty \).
Since any eigenvalue \(\lambda _{j} [ ( s ( s ( 1- \alpha ) + \alpha )^{-1} ( E-C ) - ( A+B ) )^{-1} ( B + s ( s ( 1- \alpha ) + \alpha )^{-1} C) ( e^{- s\tau } -1 ) ]\) is a continuous function of s for \(\operatorname{Re} ( s ) \geq 0\).
Similar to [15] and from condition \(( C_{2} )\), there exists \(\varepsilon >0\) such that
Hence, we have
When the positive integer n is large enough, there exists a positive constant \(\varepsilon ^{*}\) (0 < \(\varepsilon ^{*} < \varepsilon \)), and a characteristic root \(s_{n}\) s.t. \(| \operatorname{Re} ( s_{n} )| \) is sufficiently small, \(\operatorname{Re} ( s_{n} ) <0\) and
For \(\operatorname{Re}(\omega )=0 \), from (7) and (8), and for \(j =1,2,\dots , n\), we have
Choosing n large enough yields
Therefore, for \(\operatorname{Re}(s_{n}) < 0\) and \(\operatorname{Re} ( s_{n} ) \rightarrow 0\) as \(n \rightarrow +\infty \), one can obtain
which contradicts the assumption that {\(s_{n}\)} is a sequence of roots of the characteristic equation.
Similarly, by Lemma 3.2, if conditions \(( \tilde{C_{1}} ) \) and \(( \tilde{C_{2}} )\) are satisfied, then condition \(( C_{3} )\) holds. This implies that Re(s) < 0 for any root of the characteristic equation \(Q ( s, \tau )\), and in the same way we can prove that the roots remain bound away from the imaginary axis. □
Corollary 3.1
Suppose that assumption \(( C_{1} )\)holds and
then system (1) described by CF derivative with the family of matrices \(\{ E, A, B, C \} \)defined in (6) is asymptotically stable for all values of the delay τ.
Corollary 3.2
Suppose that assumption \(( \tilde{C_{1}} )\)holds and
then system (1) described by the CF derivative with the family of matrices \(\{ E, A, B, C \} \)defined in (6) is asymptotically stable for all values of the delay τ.
-
(b)
The higher-index case (\(\operatorname{ind} ( {E}, {A} ) >{1}\))
Asymptotic stability of system (1) for the case that \(( E, A )\) is regular but is not impulse-free, i.e., \(\operatorname{ind} ( E, A )= v\), \(v >1\) is considered. In fact, this type of systems has achieved only few results in special cases of the coefficient matrices (see, e.g., [13, 16]). It has been shown that for some differential–algebraic equation, delay differential equation, and delay differential–algebraic equation, the commutativity of such coefficient matrices implies the asymptotic stability.
In this paper we aim to make some contribution to fill this research gap. We extend the case of the matrices where each pair of the matrices of the family \(\{ E, A, B, C \}\) is simultaneously triangularizable, where E, A, B, and C are defined in (5). This class of system is much broader than the class of commutative matrices.
Hypothesis (\({H}_{{1}}\))
The family of matrices \(\{ E, A, B, C \}\)defined in (5) is simultaneously triangularizable.
Definition 3.6
The family of matrices \(\{ E, A, B, C \} \) defined in (5) is called commutative if E, A, B, and C pairwise commute.
Definition 3.7
Every pair of matrices of the family \(\{ E, A, B, C \}\) defined in (5) is called simultaneously triangularizable if there exists a nonsingular matrix \(T \in R^{n \times n}\) such that \(T^{-1} ET\), \(T^{-1} AT\), \(T^{-1} BT \), and \(T^{-1} CT\) are upper triangular matrices.
Lemma 3.3
([14])
Let \(\{ E, A, B, C \}\)defined in (5) be a commuting family of matrices in \(R^{n \times n}\). Then there exists a common eienvector in \(R^{n \times n} \).
Lemma 3.4
([14])
Let \(\{ E, A, B, C \}\)defined in (5) be a commuting family. Then there exists a unitary matrix \(T \in R^{n \times n}\)such that \(T^{-1} ET\), \(T^{-1} AT\), \(T^{-1} BT \), and \(T^{-1} CT\)are upper triangular matrices.
Lemma 3.4 means that a commuting family of matrices may be simultaneously upper-triangularized. The following lemma gives another sufficient condition for simultaneous triangularization.
Lemma 3.5
Let each pair of matrices of the family of matrices \(\{ E, A, B, C \}\)defined in (5) be satisfing the condition \(\operatorname{rank} ( EA - AE ) \leq 1\), \(\operatorname{rank} ( EB - BE ) \leq 1\), \(\operatorname{rank} ( EC - CE ) \leq 1\), \(\operatorname{rank} ( BA - AB )\leq 1\), \(\operatorname{rank} ( CA - AC ) \leq 1 \),and \(\operatorname{rank} ( BC - CB ) \leq 1 \),then respectively (E and A), (E and B), (E and C), (B and A), (C and A), and (B and C) are simultaneously triangularizable.
Notes: Once Lemma 3.5 is established, then Lemma 3.4 can be considered as its special case.
Hypothesis (\({H}_{{2}}\))
All the matrices E, A, B, C defined in (5) have k (\(1\leq k \leq n \)) common eigenvectors.
Now, under Hypothesis (\(H_{1}\)) and Hypothesis (\(H_{2}\)), the following theorem gives the asymptotic stability of system (1), which is regular, is not impulse-free and with a non-commutative pair of matrices of the family \(\{ E, A, B, C \} \), where E, A, B, and C are defined in (5). According to Lemma 3.5, if the rank of their commutator is less than or equal to one, we can obtain a broader criterion for non-commutative cases.
Theorem 3.3
Consider system (1) described by CF derivative. Under Hypothesis (\(H_{1}\)), Hypothesis (\(H_{{2}}\)) and if the family of matrices \(\{ E, A, B, C \} \)defined in (5) satisfies the following conditions:
Or
Then system (1) is asymptotically stable for all values of the delay τ.
Proof
According to Lemma 3.2, for all \(s \in C\) such that \(\operatorname{Re} ( s )\geq 0\),
Since every pair of matrices of the family \(\{ E, A, B, C \} \) defined in (5) is simultaneously triangularizable and the matrices E, A, B, and C have k (\(1\leq k \leq n \)) common eigenvector, then there exists a nonsingular matrix \(T \in R^{n \times n}\) such that \(T^{-1} ET\), \(T^{-1} AT\), \(T^{-1} BT \),and \(T^{-1} CT\) are upper triangular matrices.
Or equivalently,
According to condition \(( C_{1} )\), we have \(\det [ s ( s ( 1- \alpha ) + \alpha )^{-1} ( E - C ) - ( A + B ) ] \neq 0\).
Therefore,
Obviously, \(\frac{1}{e^{- s\tau } -1}\) is not an eigenvalue of the matrix \(( s ( s ( 1- \alpha ) + \alpha )^{-1} ( E - C ) - ( A + B ) )^{-1} ( B + s ( s ( 1- \alpha ) + \alpha )^{-1} C )\) and according to condition \(( C_{2} )\), we have
With the notation of the proof of Lemma 3.2, we get
Thus system (1) is asymptotically stable. In the same way, if \(( \tilde{C_{1}} )\) and \(( \tilde{C_{2}} )\) are satisfied, then it is easy to show that system (1) is asymptotically stable for all values of the delay τ. □
Corollary 3.3
Consider system (1) described by the CF derivative. If the family of matrices \(\{ E, A, B, C \} \)defined in (5) is commutative and satisfies the following conditions:
Or
Then system (1) is asymptotically stable.
Proof
Since the family of matrices \(\{ E, A, B, C \} \) defined in (5) is commutative, then by using Lemma 3.3, there exists a common eigenvector. Also, by Lemma 3.4, there exists a unitary matrix \(T \in R^{n \times n}\) such that \(T^{-1} ET\), \(T^{-1} AT\), \(T^{-1} BT \),and \(T^{-1} CT\) are upper triangular matrices. So each pair of matrices of the family \(\{ E, A, B, C \} \) which is defined in (5) is simultaneously triangularizable. According to Theorem 3.3, system (1) is asymptotically stable. □
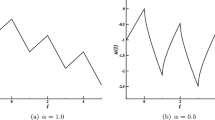
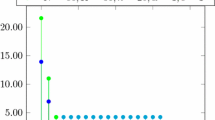
4 Illustrative example
Consider the Caputo–Fabrizio fractional-order neutral delay differential–algebraic system
with
Obviously, E is singular, \(\det ( sE - A ) =- ( s +1 ) \neq 0\) when \(s\neq \frac{- \alpha }{1- \alpha }\) and \(\operatorname{rank} ( E ) =3\). This system is regular but is not impulse-free, so Theorem 3.2 could not be applied. Also, in this case the family of matrices \(\{ E, A, B, C \} \) is non-commutative, i.e., \(EB \neq BE\) and \(BC \neq CB\)
But since
and
so by Lemma 3.5 we have E and A are simultaneously upper-triangularizable. Also, because of
each pair of the family of matrices \(\{ E, A, B, C \} \) is simultaneously upper-triangularizable.
Let \(\lambda _{i} ( F )\) represent ith eigenvalue of matrix \(F \in R^{4\times 4}\) for \(i =1, 2, 3, \text{and } 4\).
The common eigenvectors of E, A, B, and C corresponding to its eigenvalues are
We can obtain nonsingular matrix \(T \in R^{4\times 4}\) whose first column is
and the third column and fourth column are the basis canonique of the space \(R^{4}\):
So we get
All the roots of the equation \(\det [ s (s ( 1-\alpha ) +\alpha )^{-1} ( T^{-1} ET - T^{-1} CT ) - ( T^{-1} AT + T^{-1} BT ) ] =0\) have negative real parts.
Also, for any \(s\in C\), \(\operatorname{Re} ( s ) \geq 0 \), let
So \(\det [ \lambda I-G ( s ) ] =0\) ⇒
Therefore, \(\forall s\in C\), \(\operatorname{Re} \{ \lambda _{j} [ G ( s ) ] \} <0\) for \(j=1,2, 3, \text{and } 4 \).
5 Conclusions
Asymptotic stability of linear fractional-order neutral delay differential–algebraic systems described by the Caputo–Fabrizio (CF) fractional derivative has been investigated. Solvability and uniqness on \([0, +\infty )\) of such a system have been considered (Lemma 3.1). Using the Laplace transform, we have derived a new characteristic equation. This characteristic equation involves a transcendental term, which makes it difficult to use in practice and in particular to study the asymptotic stability of such a system. To overcome this difficulty, some sufficient algebraic criteria have been given to ensure the asymptotic stability (Lemma 3.2). We have successfully shown that under these algebraic criteria, asymptotic stability holds when \(\operatorname{ind}(E, A)=1\) (Theorem 3.2). Morevere, when \(\operatorname{ind} ( E, A ) >1\), we have shown that if all system matrices have k (\(1\leq k \leq n \)) common eigenvectors and if every pair of matrices is simultaneously triangularizable so that the algebraic criteria hold, then this system is still asymptotically stable for any delay parameter (Theorem 3.3). The effectiveness of the theoretical results has been illustrated by a numerical example.
References
Alshabanat, A., Jleli, M., Kumar, S., Samet, B.: Generalization of Caputo–Fabrizio fractional derivative and applications to electrical circuits. Front. Phys. 8, 64 (2020)
Atanackovié, T.M., Pilipovié, S., Zorica, D.: Properties of the Caputo–Fabrizio fractional derivative and its distributional settings. Fract. Calc. Appl. Anal. 21(1), 29–44 (2018)
Atangana, A.: Modelling the spread of Covid-19 with new fractal-fractional operators: can the lockdown save mankind before vaccination? Chaos Solitons Fractals 136, 109860 (2020)
Atangana, A., Baleanu, D.: Application of fixed point theorem for stability analysis of a nonlinear Schrodinger with Caputo–Liouville derivative. Filomat 31(1), 2243–2248 (2017). https://doi.org/10.2298/FIL1708243A
Baleanu, D., Jleli, M., Kumar, S., Samet, B.: A fractional derivative with two singular kernels and application to a heat conduction problem. Adv. Differ. Equ. 2020, 252 (2020). https://doi.org/10.1186/s13662-020-02684-z
Baleanu, D., Mousalou, A., Shahram, R.: The extended fractional Caputo–Fabrizio derivative of order \(0\leq \sigma <1\) on \(C_{R} [0, 1] \) and the existence of solutions for two higher-order series-type ifferential equations. Adv. Differ. Equ. 2018, 255 (2018). https://doi.org/10.1186/s13662-018-1696-6
Caputo, M., Fabrizio, M.: A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 73–85 (2015)
Caputo, M., Fabrizio, M.: Applications of new time and spatial fractional derivatives with exponential kernels. Prog. Fract. Differ. Appl. 2(1), 1–11 (2018)
Dassios, I., Baleanu, D.: Caputo and related fractional derivatives in singular systems. Appl. Math. Comput. 337, 591–606 (2018)
Eftekhari, L., Hosseinpour, S., Khalighi, M.: A comparison between Caputo and Caputo–Fabrizio fractional derivatives for modelling Lotka–Voltera differential equations. Preprint, submitted to Elsevier, August 19, 2019
Evirgen, F., Yavuz, M.: An alternative approach for nonlinear optimization problem with Caputo–Fabrizio derivative. In: ITM Web of Conferences, vol. 22, 01009, CMES (2018). https://doi.org/10.1051/itmconf/20182201009
Fatmawati, K.M.A., Odinsyah, H.P.: Fractional model of HIV transmission with awareness effect. Chaos Solitons Fractals 138, 109967 (2020)
Ha, P.: Spectral characterizations of solvability and stability for delay differential-algebraic equations. Cornell University (2018) arXiv:1802.01148v1 [math.DS]
Horn, R., Johnson, C.: Matrix Analysis. Cambridge University Press, Cambridge (1985)
Hu, G., Hu, G., Cahlon, B.: Algebraic criteria for stability of linear neutral systems with a single delay. J. Comput. Appl. Math. 135, 125–133 (2001)
Hu, G., Mitsui, T.: Stability of linear delay differential systems with matrices having common eigenvectors. Jpn. J. Ind. Appl. Math. 13, 487–494 (1996)
Jarlebring, E., Damm, T.: The Lambert W function and the spectrum of some multidimensional time-delay systems. Automatica 43, 2124–2128 (2007)
Kaczorek, T.: Reachability of fractional continuous-time linear systems using the Caputo–Fabrizio derivative. In: Proceeding 30th European Conference on Modelling and Simulation (2015)
Kaslik, E., Sivasundaram, S.: Analytical and numerical methods for the stability analysis of linear fractional delay differential equations. J. Comput. Appl. Math. 236(16), 4027–4041 (2012)
Khan, M.A.: The dynamics of a new chaotic system through the Caputo–Fabrizio and Atanagan–Baleanu fractional operators. Adv. Mech. Eng. 11(7), 1687814019866540 (2019) 1-12
Khan, M.A., Atangana, A.: Modeling the dynamics of novel coronavirus (2019-nCov) with fractional derivative. Alex. Eng. J. 59(4), 2379–2389 (2020)
Kumar, R., Kumar, S., Singh, J., Al-Zhour, Z.: A comparative study for fractional chemical kinetics and carbon dioxide CO2 absorbed into phenyl glycidyl ether problems. AIMS Math. 5(4), 3201–3222 (2020)
Kumar, S., Ahmadian, A., Kumar, R., Kumar, D., Singh, J., Baleanu, D., Salimi, M.: An efficient numerical method for fractional SIR epidemic model of infectious disease by using Bernstein wavelets. Mathematics 8(4), 558 (2020)
Kumar, S., Ghosh, S., Lotayif, M.S., Samet, B.: A model for describing the velocity of a particle in Brownian motion by Robotnov function based fractional operator. Alex. Eng. J. 59(3), 1435–1449 (2020)
Kumar, S., Ghosh, S., Samet, B., Goufo, E.F.D.: An analysis for heat equations arises in diffusion process using new Yang–Abdel-Aty–Cattani fractional operator. Math. Methods Appl. Sci. 43(9), 6062–6080 (2020)
Kumar, S., Kumar, A., Odibat, Z., Aldhaifallah, M., Nisar, K.S.: A comparison study of two modified analytical approach for the solution of nonlinear fractional shallow water equations in fluid flow. AIMS Math. 5(4), 3035–3055 (2020)
Kumar, S., Kumar, R., Cattani, C., Samet, B.: Chaotic behaviour of fractional predator–prey dynamical system. Chaos Solitons Fractals 135, 109811 (2020)
Lal, S., Bansal, M.K., Kumar, D., Kumar, S., Singh, J.: Fractional differential equation pertaining to an integral operator involving incomplete H-function in the kernel. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6670
Li, H., Cheng, J., Li, H., Zhong, S.: Stability analysis of a fractional-order linear system described by the Caputo–Fabrizio derivative. Mathematics 7, 200 (2019). https://doi.org/10.3390/math7020200
Li, H., Lu, S., Xu, T.: A fully discrete spectral method for fractional Cattaneo equation based on Caputo–Fabrizio derivative. Numer. Methods Partial Differ. Equ. 35(3), 936–954 (2019)
Li, H., Zhong, S.-M., Cheng, J., Li, H.-B.: Stability analysis of a fractional-order linear system with time delay described by the Caputo–Fabrizio derivative. Adv. Differ. Equ. 2019, 86 (2019)
Li, H., Zhong, S.-M., Li, H.: Asymptotic stability analysis of a fractional-order neutral systems with time delay. Adv. Differ. Equ. 2015, 325 (2015)
Liu, K., Feckan, M., Regan, D., Wang, J.: Hyers–Ulam stability and existence of solutions for differential equations with Caputo–Fabrizio derivative. Mathematics 7, 333 (2019). https://doi.org/10.3390/math7040333
Moore, E., Sirisubtawee, S., Koonparasert, S.: A Caputo–Fabrizio fractional differential equation model for HIV/AIDS with treatment compartment. Adv. Differ. Equ. 2019, 200 (2019)
Pang, D., Jiang, W.: Finite-time stability analysis of fractional singular time-delay systems. Adv. Differ. Equ. 2014, 259 (2014)
Phi, H.: On the stability analysis of delay differential-algebraic equations. VNU J. Sci. Math. Phys. 34(2), 52–64 (2018)
Podlubny, I.: Fractional Differential Equations. Mathematics in Science and Engineering, vol. 198. Technical University of Kosice, Kosice (1999)
Qureshi, S., Norodin, R., Baleanu, D.: New numerical aspects of Caputo–Fabrizio fractional derivative operator. Mathematics 7, 374 (2019). https://doi.org/10.3390/math7040374
Shiri, B., Baleanu, D.: System of fractional differential algebraic equations with applications. Chaos Solitons Fractals 120, 203–212 (2019)
Singh, J., Kumar, D., Kumar, S.: An efficient computational method for local fractional transport equation occurring in fractal porous media. Comput. Appl. Math. 39, 137 (2020)
Ullah, S., Khan, M.A.: Modeling the impact of non-pharmaceutical interventions on the dynamics of novel coronavirus with optimal control analysis with a case study. Chaos Solitons Fractals 139, 110075 (2020)
Weihua, D., Changpin, L., Jinhu, L.: Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 48, 409–416 (2007)
Acknowledgements
The author is grateful to the anonymous referees for their constructive comments and helpful suggestions, improving this paper greatly.
Availability of data and materials
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The entire paper is finished by one author. The author read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares that he has no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Al Sawoor, A. Stability analysis of fractional-order linear neutral delay differential–algebraic system described by the Caputo–Fabrizio derivative. Adv Differ Equ 2020, 531 (2020). https://doi.org/10.1186/s13662-020-02980-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02980-8