
Abstract
This paper deals with a predator–prey model with both species in the delayed-dispersal case in a two-patch environment. The purpose of this paper is to study the effect of two dispersal delays on the stability of three equilibria. It turns out that the stability of the trivial equilibrium and the boundary equilibrium is delay-independent. However, the stability of the coexistence equilibrium is delay-dependent. Numerical simulations are performed to demonstrate the obtained results.
Similar content being viewed by others

1 Introduction
The relationship of predator and prey is prevalent in nature and hence is one of the most important themes in ecological and mathematical models. Since the Lotka–Volterra predator–prey model was formulated, various predator–prey models have been studied by incorporating additional ecological concepts into the classical Lotka–Volterra model, such as functional responses, dispersal and time delay. In predator–prey models, dispersal will represent migration of either the prey population, the predator population, or both [1, 2].
Population dispersal is very common in ecology. Species migrate from one patch to another patch, due to some kinds of factor in the initial patch. For instance, a prey species will choose to move on the basis of resource availability and predation risk, while predators tend to migrate to the better patch to gain more prey. In nature, lack of food, competition, sex, age, lack of security (mainly for the prey), climatic conditions, season, overpopulation in a patch—these factors make species move from a patch to another [3]. For example, in aquatic environments, many zooplankton species exhibit vertical movements each day due to light and food. During the day time, some species migrate downwards into the darkness to reduce the predation risk by fish, while at night time, these species move upward to consume the phytoplankton [4]. There has been great interest in the study of mathematical models of populations with species dispersal among patches, such as a single population dispersal [5–8], and the dispersal of both prey and predator among patches [9–11].
It is worth pointing out that most of the research work in population models with patchy structures assumed the dispersal to be instantaneous. In fact, species movement between patches takes some time. Recently, Zhang et al. considered a predator–prey metapopulation model with travel time delay and showed that such delay can stabilize and destabilize the system [8].
To the best of our knowledge, there is little research on joining considerations of migration and dispersal delay in biological models. It is challenging to add time delays to predator–prey models for the mathematical analysis. Delay may change the stability of dynamics and Hopf bifurcation may occur. Motivated by the above predator–prey model, we will integrate dispersal of both species and dispersal delays into a two-patch Rosenzweig–MacArthur predator–prey model. We shall investigate how the dispersal and dispersal delays interact to affect the stability of the predator–prey metapopulation model.
The rest of the paper is organized as follows. The formulation of mathematical model is presented in Sect. 2. The stability analysis of our model at three equilibria are given in Sect. 3. Then numerical simulations based on the analysis are reported in Sect. 4. Finally, we conclude the paper by a short discussion.
2 Model formulation
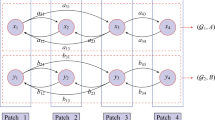
In this paper, our model assumes that the prey has a logistic growth rate and a predator has a Holling-type II functional response on each patch. The predator decays exponentially in the absence of prey. And we suppose that these patches are identical and the prey and predators can randomly move between two patches. During dispersal, migrating populations are assumed not to participate in the predator–prey interaction due to the two species being in different habitats. Thus, we propose a two-patch predator–prey model with dispersal of both species:
where \(i,j\in\{1,2\}\) and \(i\neq j\). \(H_{i}\) and \(P_{i}\) denote the densities of prey and predators in patch i, respectively. r is the prey growth rate. K is the carrying capacity of prey. a is the maximum and constant rate of prey consumption per predator. b is the prey density where the attack rate is half-saturated. c is the inverse of yield. δ is the predator mortality. D and M are the dispersal rate of prey and predators among patches, respectively. \(\eta_{1}\) and \(\eta_{2}\) are the dispersal time of prey and predators, respectively.
A series of change of variables is carried out to reduce the number of parameters: \(H_{i}=bh_{i}\), \(P_{i}=\frac{br}{ac}p_{i}\), \(t=\frac{s}{a}\), \(\eta_{i}=\frac {\tau_{i}}{a}\), \(\kappa=\frac{K}{b}\), \(\varepsilon=\frac{r}{a}\), \(d=\frac {D}{a}\), \(m=\frac{M}{a}\), \(\mu=\frac{\delta}{a}\), and this yields the model
If \(d=0\) and \(m=0\), the single patch model has three equilibria: \((0,0)\), \((\kappa,0)\) and \((h^{*},p^{*})\) with \(h^{*}=\frac{\mu}{1-\mu}\) and \(p^{*}=(1-\frac{h^{*}}{\kappa })(1+h^{*})\). Its dynamics is described by the following results [12].
Theorem 2.1
Consider (2.2) with \(d=0\) and \(m=0\), the following conclusions hold:
-
(1)
The trivial equilibrium \((0,0)\) is unstable.
-
(2)
The predator-extinction equilibrium \((\kappa,0)\) is stable when \(\mu>\frac{\kappa}{1+\kappa}\).
-
(3)
The coexistence equilibrium \((h^{*},p^{*})\) exists if and only if \(0<\mu<\frac{\kappa}{1+\kappa}\).
-
(4)
The coexistence equilibrium is globally stable when \(\frac{\kappa-1}{\kappa+1}<\mu<\frac{\kappa}{1+\kappa}\).
-
(5)
There is a unique globally stable limit cycle if \(0<\mu <\frac{\kappa-1}{\kappa+1}\).
3 Stability analysis of the equilibria
Model (2.2) has three equilibria representing different outcomes of the ecological system:
Now we linearize system (2.2) at an equilibrium \((h,p,h,p)\) and substitute an exponential solution, and we obtain the characteristic equation \(\det J=0\) with
where
and
It is easy to calculate that \(\det(J)=\det(J_{1} + J_{2})\cdot\det(J_{1} - J_{2})\). The characteristic equation determines the local stability of equilibria. The equilibrium is stable if and only if all the characteristic roots have negative real part. In the following, we will analyze the stability of our model (2.2) at three equilibria, respectively.
3.1 The stability analysis of \(E_{0}\)
Inserting the trivial equilibrium \(E_{0}\) into the characteristic equation \(\det J=0\), we get the characteristic equations
When the dispersal is instantaneous, i.e., \(\tau_{1}=\tau_{2}=0\), the roots of characteristic equations are ε, \(\varepsilon-2d\), −μ, \(-\mu-2m\). Thus, there exists at least one positive root which leads to the instability of \(E_{0}\).
Based on the technique of [13–15], the stability change at the equilibrium can only happen when characteristic roots appear on or cross the imaginary axis as τ increases. Here we assume that \(\varepsilon\neq2d\), then we look for a pair of purely imaginary roots of the characteristic equations (3.1).
Set \(\lambda=i\omega\) with \(\omega>0\). By substituting λ into the first equation of (3.1), then separating the real and imaginary parts, we get
Then the first equation of (3.1) admits a pair of purely imaginary roots \(\pm i\omega_{0}\) with \(\omega_{0}=\sqrt {d^{2}-(\varepsilon-d)^{2}}\).
Similarly, for the second equation of (3.1), there is a pair of purely imaginary roots \(\pm i\omega_{0}\) with \(\omega_{0}=\sqrt {d^{2}-(\varepsilon-d)^{2}}\).
For the third equation and the last equation of (3.1), by using the same method, we have \(\omega^{2}=m^{2}-(\mu+m)^{2}<0\). Thus, there are no purely imaginary roots for the last two equations of (3.1).
Lemma 3.1
Suppose at certain \(\tau_{1}\), the first and second equation of characteristic equation (3.1) have purely imaginary roots \(\pm i\omega\). Then
Proof
It follows from the first equation of (3.1) that
Thus
Consequently, \(\frac{d\operatorname{Re}(\lambda)}{d\tau_{1}}|_{\lambda=i\omega}>0\).
For the second equation of (3.1), the conclusion of the lemma also holds. The proof is complete. □
By Lemma 3.1, we know that \(\frac{d\operatorname{Re}(\lambda)}{d\tau _{1}}| _{\lambda=i\omega_{0}}>0\). This indicates that, as \(\tau_{1}\) increases, for the first and second equation of (3.1), the characteristic roots cross the imaginary axis through \(\pm i\omega _{0}\) at \(\tau=\tau_{1}\) from left to right and the number of characteristic roots with positive real parts is increased by 2.
On the other hand, for the third and fourth equations of (3.1), there are no purely imaginary roots. Note the instability of \(E_{0}\) for \(\tau_{1}=\tau_{2}=0\), thus \(E_{0}\) remains unstable for \(\tau_{1}>0\) and \(\tau_{2}>0\).
3.2 The stability analysis of \(E_{1}\)
Using the same procedure as the stability analysis of \(E_{0}\), inserting the equilibrium \(E_{1}\) into the characteristic equation \(\det J=0\), we get the characteristic equations
When \(\tau_{i}=0\), the roots of the characteristic equations (3.3) are −ε, \(-\varepsilon-2d\), \(\frac{\kappa }{1+\kappa }-\mu\), \(\frac{\kappa}{1+\kappa}-\mu-2m\). Here we have two cases to consider: (1) \(\mu>\frac{\kappa}{1+\kappa}\), all roots are negative, so equilibrium \(E_{1}\) is stable; (2) \(0<\mu<\frac{\kappa}{1+\kappa}\), the roots at least have a positive root, \(E_{1}\) is unstable.
Substituting \(\lambda=i\omega\) with \(\omega>0\) into these characteristic equations (3.3), and separating the real and imaginary parts, we can calculate that if \(\mu>\frac{\kappa}{1+\kappa}\), \(|\cos\omega\tau_{1}|=1+\frac{\varepsilon}{d}>1\), \(|\cos \omega\tau _{2}|=1-\frac{\frac{\kappa}{1+\kappa}-\mu}{m}>1\), which means there is no solutions of (3.3) can appear on the imaginary axis for any \(\tau_{i}\). Therefore, \(E_{1}\) is locally asymptotically stable when \(\mu>\frac {\kappa}{1+\kappa}\).
For case (2), if \(0<\mu<\frac{\kappa}{1+\kappa}\), by the expression of \(\cos\omega\tau_{1}\), the first and second equations of (3.3) have no imaginary roots. However, the third and fourth equations admit purely imaginary roots \(\pm i \omega\) with \(\omega=\sqrt{m^{2}- (m-(\frac{\kappa }{1+\kappa }-\mu) )^{2}}\) if \(\frac{\kappa}{1+\kappa}-2m<\mu<\frac{\kappa}{1+\kappa}\); the two equations have no imaginary roots while if \(0<\mu<\frac {\kappa }{1+\kappa}-2m\). It is easy to show that \(\operatorname{sign} (\frac{d(\operatorname{Re}\lambda)}{d\tau _{2}} )|_{\lambda=i\omega}=\operatorname{sign}(\omega^{2})>0\), Note that equilibrium \(E_{1}\) is unstable with \(\tau_{1}=\tau_{2}=0\) in case (2). So when \(0<\mu<\frac{\kappa}{1+\kappa}\), \(E_{1}\) remains unstable as \(\tau _{1}\) and \(\tau_{2}\) increase.
3.3 The stability analysis of \(E_{2}\)
In this subsection, we assume that \(0<\mu<\frac{\kappa}{1+\kappa}\) to ensure the coexistence equilibrium \(E_{2}\) exists. Inserting \(E_{2}\) into the characteristic equation \(\det J=0\), we get
where \(A=\varepsilon\cdot\frac{\kappa+1}{\kappa}\cdot\frac{\mu }{1-\mu }\cdot(\frac{\kappa-1}{\kappa+1}-\mu)\) and \(B=\varepsilon\mu(1-\frac{\mu}{\frac{\kappa}{1+\kappa}})>0\) (since \(0<\mu<\frac{\kappa}{1+\kappa}\)).
When \(\tau_{1}=\tau_{2}=0\), the characteristic equation becomes
Therefore, the coexistence equilibrium is stable if \(A<0\), otherwise unstable.
When \(m=0\), this implies that prey disperses only. Based on the results of [8], we summarize the related conclusions in the following theorem.
Theorem 3.2
Consider system (2.2) with \(m=0\). If \(A<0\), the coexistence equilibrium \(E_{2}\) is locally asymptotically stable for all \(\tau_{1}\geq0\). If \(A>0\), then the coexistence equilibrium \(E_{2}\) is unstable when \(\tau _{1}=0\), and as \(\tau_{1}\) increases, we have the following results.
- Case (i):
-
\(d\in(0, A/2)\): the coexistence equilibrium \(E_{2}\) remains unstable for \(\tau_{1}>0\).
- Case (ii):
-
\(d\in(A/2,A)\): the coexistence equilibrium \(E_{2}\) remains unstable for \(\tau_{1}>0\).
- Case (iii):
-
\(d\in(A, \infty)\): there may exist stability switches.
When both species are mobile, due to the presence of two different time delays in characteristic equations, it is usually difficult to analyze the transcendental equation with two delays. Actually, finding all the characteristic roots of Eq. (3.4) have negative real parts is hopeless [16]. This indicates the difficulty in investigating the distribution of the zeros of Eq. (3.4). Thus, we mainly numerically examine how the two dispersal delays affect the stability of the coexistence equilibrium in our model in the next section.
4 Numerical simulations
From the above section, we know that the stability of the trivial equilibrium \(E_{0}\) and the boundary equilibrium \(E_{1}\) is relatively simple. However, the stability analysis of the coexistence equilibrium \(E_{2}\) is complicated. Therefore, in this section, we mainly present some numerical examples of our model (2.2) and investigate that the effect of delay on the stability and instability of the coexistence equilibrium \(E_{2}\). Based on Theorem 3.2, we display the numerical simulations in each case.
Example 1
We take parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.4\), \(d=0.1\), \(m=0.05\), \(\tau_{1}=2\), \(\tau_{2}=2\). This set of parameter values lead to \(A=-0.09<0\). In this case, \(E_{2}=(0.71,1.10,0.71,1.10)\) is locally asymptotically stable. Due to the identical patch, we only plot the numerical simulations in each patch. As can be seen in Fig. 1, the prey and predators populations in each patch approach to 0.71 and 0.10, respectively.

\(E_{2}\) is locally asymptotically stale under case \(A<0\). Parameter values are \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.4\), \(d=0.1\), \(m=0.05\), \(\tau_{1}=2\), \(\tau_{2}=2\). Left panel: the phase graph of model (2.2) in each patch; right panel: the numerical solutions of model (2.2) in each patch
Example 2
Chose parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.0125\), \(m=0.02\), \(\tau_{1}=2\), \(\tau_{2}=2\). This set of parameter values corresponds to the case \(A=0.05>0\) and \(0< d< A/2\). As shown in Fig. 2, the prey population in two patches will be fluctuating at same level, and so does the predators. This indicates that the coexistence equilibrium \(E_{2}\) is unstable. But the prey and predator species will have long-term persistence in both patches.

The two figures show that the coexistence equilibrium \(E_{2}\) is unstable with parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.0125\), \(m=0.02\), \(\tau_{1}=2\), \(\tau_{2}=2\). System (2.2) has a periodic solution. Left panel: the phase graph of model (2.2) in each patch; right panel: the trajectory graph of model (2.2) in each patch
Example 3
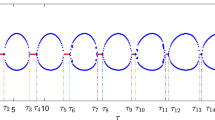
We choose \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.038\), \(m=0.05\), \(\tau_{1}=2\). This leads to the case: \(0< A/2< d< A\). If \(\tau_{1}=2\) and \(m=0\), the coexistence equilibrium \(E_{2}\) is unstable. As we take \(m=0.05\), we find there exists a stable interval as \(\tau_{2}\) increases, which is illustrated in Fig. 3.

The \(\tau_{2}\)-bifurcation diagram of system (2.2) in the case \(A/2< d< A\). Parameter values are \(\varepsilon=1\), \(\kappa=2\), \(\mu =0.17\), \(d=0.038\), \(m=0.05\), \(\tau_{1}=2\)
In order to investigate our model (2.2) in the case \(d>A>0\), two dispersal delays may induce Hopf bifurcation. Thus, we first plot the numerical solutions and the \(\tau _{1}\)-bifurcation diagram of (2.2) with \(m=0\) in each cases. Then we choose values of \(\tau_{1}\) in its stable intervals and unstable intervals, respectively. We regard \(\tau_{2}\) as bifurcation parameter and display the bifurcation diagram of (2.2).
Example 4
We consider the case \(d>A>0\). Thus we first take parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.1\), \(m=0\). This means that prey individuals disperse, but predators are sedentary. In this case, there is a stable interval as shown in Fig. 4.

\(\tau_{1}\)-bifurcation diagram of system (2.2) under case \(d>A\) with parameter \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.1\), \(m=0\)
Next, we take two sets of parameter values \(m=0.05\), \(\tau_{1}=2\) and \(m=0.05\), \(\tau_{1}=6\), respectively, and keep all other parameter values the same as above. As we see in Fig. 4, \(\tau_{1}=2\) and \(\tau_{1}=6\), the system (2.2) is unstable at the coexistence equilibrium \(E_{2}\). We also investigate that the coexistence equilibrium is unstable if \(m=0.05\), \(\tau_{1}=2\) and \(\tau_{2}=0\), while it is stable if \(m=0.05\), \(\tau_{1}=6\) and \(\tau_{2}=0\). As \(\tau_{2}\) increases, there is a stable interval which is illustrated in Fig. 5.

Bifurcation diagram of system (2.2) by regarding \(\tau _{2}\) as bifurcation parameter with parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.1\), \(m=0.05\). Left panel: \(\tau_{1}=2\); right panel: \(\tau_{1}=6\)
Note that the coexistence equilibrium \(E_{2}\) is stable when \(\tau_{1}=4\) in Fig. 4. Thus we finally take parameter values \(\varepsilon=1\), \(\kappa=2\), \(\mu =0.17\), \(d=0.1\), \(m=1\), \(\tau_{1}=4\), and present the bifurcation diagram of system (2.2) by regarding \(\tau_{2}\) as bifurcation parameter (see Fig. 6). We show that system (2.2) has a stable switch with \(\tau_{1}=4\) as \(\tau_{2}\) increases.

\(\tau_{2}\)-bifurcation diagram of system (2.2) with \(\varepsilon=1\), \(\kappa=2\), \(\mu=0.17\), \(d=0.1\), \(m=1\), \(\tau_{1}=4\)
In all, as shown in Fig. 5 and Fig. 6, dispersal delays may exhibit both stabilizing and destabilizing effects on the coexistence equilibrium.
5 Summary and discussion
This paper is concerned with a predator–prey model with two dispersal delays and the stability analysis of three equilibria. We focus attention on the effect of two dispersal delays on the dynamics of our model (2.2). Moreover, we show that, for the trivial equilibrium and the boundary equilibrium, dispersal delays have no impact on the stability and instability of two equilibria. However, the stability of the coexistence equilibrium is delay-dependent. Delays can destabilize and stabilize the coexistence equilibrium. Indeed, the dispersal delays cannot only switch the stability but also induce a Hopf bifurcation. If the species’ mortality during dispersal is considered, the stability analysis becomes very difficult. Numerical simulations are carried out showing that stability switches are possible. We leave the related analysis for our future work.
References
Hanski, I.: Metapopulation dynamics. Nature 396(6706), 41 (1998)
Shigesada, N., Kawasaki, K.: Biological Invasions: Theory and Practice. Oxford University Press, London (1997)
Pillai, P., Gonzalez, A., Loreau, M.: Evolution of dispersal in a predator–prey metacommunity. Am. Nat. 179(2), 204–216 (2011)
Andersen, V., Gubanova, A., Nival, P., Ruellet, T.: Zooplankton community during the transition from spring bloom to oligotrophy in the open nw Mediterranean and effects of wind events. 2. Vertical distributions and migrations. J. Plankton Res. 23(3), 243–261 (2001)
Freedman, H.I.: Single species migration in two habitats: persistence and extinction. Math. Model. 8, 778–780 (1987)
Kuang, Y., Takeuchi, Y.: Predator–prey dynamics in models of prey dispersal in two-patch environments. Math. Biosci. 120(1), 77–98 (1994)
Kang, Y., Sourav, K.S., Komi, M.: A two-patch prey-predator model with predator dispersal driven by the predation strength. Math. Biosci. Eng. 14(4), 843–880 (2017)
Zhang, Y., Lutscher, F., Guichard, F.: The effect of predator avoidance and travel time delay on the stability of predator–prey metacommunities. Theor. Ecol. 8(3), 273–283 (2015)
El Abdllaoui, A., Auger, P., Kooi, B.W., De la Parra, R.B., Mchich, R.: Effects of density-dependent migrations on stability of a two-patch predator–prey model. Math. Biosci. 210(1), 335–354 (2007)
Mchich, R., Auger, P., Poggiale, J.-C.: Effect of predator density dependent dispersal of prey on stability of a predator–prey system. Math. Biosci. 206(2), 343–356 (2007)
Feng, W., Rock, B., Hinson, J.: On a new model of two-patch predator prey system with migration of both species. J. Appl. Anal. Comput. 1(2), 193–203 (2011)
Kot, M.: Elements of Mathematical Ecology. Cambridge University Press, Cambridge (2001)
Cooke, K.L., Grossman, Z.: Discrete delay, distributed delay and stability switches. J. Math. Anal. Appl. 86(2), 592–627 (1982)
Yang, K.: Delay Differential Equations: With Applications in Population Dynamics. Academic Press, New York (1993)
Wei, J., Ruan, S.: Stability and bifurcation in a neural network model with two delays. Phys. D, Nonlinear Phenom. 130(4), 255–272 (1999)
Olien, L., Belair, J.: Bifurcations, stability, and monotonicity properties of a delayed neural network model. Phys. D, Nonlinear Phenom. 102(3), 349–363 (1997)
Acknowledgements
The authors wish to thank the editor and the referees for reading this manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (No. 11371313 and No. 61573016) and by the Foundation of Yuncheng University (No. YQ-2017003 and No. YQ-2014011). AM was partially supported by China Scholarship Council (No. 201608140214).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. The authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Sun, G., Mai, A. Stability analysis of a two-patch predator–prey model with two dispersal delays. Adv Differ Equ 2018, 373 (2018). https://doi.org/10.1186/s13662-018-1833-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1833-2