
Abstract
This paper solves fractional differential equations using the Shehu transform in combination with the q-homotopy analysis transform method (q-HATM). As the Shehu transform is only applicable to linear equations, q-HATM is an efficient technique for approximating solutions to nonlinear differential equations. In nonlinear systems that explain the emergence of stripes in 2D systems, the Newell–Whitehead–Segel equation plays a significant role. The findings indicate that the outcomes derived from the tables yield superior results compared to the existing LTDM in the literature. Maple is utilized to depict three-dimensional surfaces and find numerical values that are displayed in a table.
Similar content being viewed by others


1 Introduction
Leibnitz created arbitrary-order derivatives shortly after integer-order derivatives, and this topic has attracted the interest of numerous academics recently. As soon as its potential was known, fractional calculus (FC) quickly replaced classical calculus as the preferred modeling tool for practical issues. FC theory provides a superbly methodical framework for understanding the physical world. The specific explanation it offers for nonlinear complex systems has recently attracted the attention of numerous experts. Using fractional models of differential equations has the benefit of being nonlocal, which can be used in any model. Locality is preserved by derivatives of integer order, but nonlocality is introduced by those of fractional order. This demonstrates that the future state of a physical system is dependent on not only its current state but also its past states. Models built with the use of fractional-order derivatives are thus more accurate representations of reality. Classical derivatives and fractional derivatives are both mathematical concepts related to the rate of change of a function, but they differ in their definition and application. While classical derivatives deal with integer orders and provide information about instantaneous rates of change, fractional derivatives extend this concept to noninteger orders, offering a way to model systems with memory or long-range dependence. Fractional calculus is a field that has found applications in diverse scientific and engineering disciplines [1].
However, the fractional order varies based on time and space. The scenario leads to a rapidly expanding field of FPDEs with fractional operators of variable order. Several potent numerical approaches were established in the scientific literature, and numerous eminent scholars contributed to this topic. These techniques include the adomian decomposition method (ADM), the homotopy perturbation method (HPM), the homotopy analysis method (HAM), the collocation method, the Sumudu transform method (STM), the conformable Shehu homotopy perturbation method (CSHPM), the conformable q-Shehu homotopy analysis transform method (Cq-SHATM), the conformable sumudu decomposition method, the conformable Laplace decomposition method, and the differential transform method (DTM) [2–32].
In recent years, there have been studies on ST in the literature [33–40]. Using the q-homotopy Shehu analysis transform method (q-HSATM), we analyze and find an approximated analytical solution for the time-fractional NWS equation in the current framework. The methodology under consideration has been tweaked, and it is now a sophisticated hybrid of q-HATM and the Shehu transform (ST). Since q-HATM is a modified method of HAM, it avoids the need for linearization, discretization, and perturbation, and it also requires less memory and fewer calculations than traditional HAM and no complicated polynomials, integrations, or physical parameters. Recently, many researchers have found it to be highly helpful in interpreting results for many types of nonlinear problems due to its consistency and effectiveness. Srivastava et al. determine the q-HATM solution for the model of the vibration equation and analyze its behavior [41]. Veeresha et al. examine the approximation of an analytical solution for a smoking epidemic model of fractional order [42]. Singh et al. suggest that the efficiency of q-HATM may be shown in the coupled system [43]. Numerical simulations of the Gardner and Cahn–Hilliard equations are presented by Prakasha et al., who verify that the proposed method is more accurate than alternative classical techniques [44]. Veeresha et al. provide an illustrative example of the novel numerical surfaces used in the mathematical model of cancer chemotherapy [45]. The solution for the combined modified Boussinesq and approximate long wave was reported by Veeresha et al. [46]. Using the energy-dependent Schrödinger potential as an example, Veeresha et al. demonstrated the superior performance of the suggested strategy over the coupled fractional reduced differential transform method (CFRDTM) for solving the associated coupled equation [47]. The proposed method is also being considered by many researchers as a means to obtain an approximate analytical solution to a wide range of issues [48, 49].
The fluctuations in the sand, the lines on seashells, and many other striped patterns like these can be modeled by amplitude equations. The NWSE is one of the most important amplitude equations in applied sciences. It shows how stripes appear in two-dimensional systems [50–53]. The NWSE has the form [50, 51, 54]
where m is a positive integer, a, h and c real numbers.
The Shehu transform is used to solve linear equations such as the Laplace transform. However, to solve nonlinear equations, q-homotopy analysis must be used together with a numerical method such as the transform method. Therefore, in this study, the Shehu transform and the q-homotopy analysis transformation method were combined. This paper aims to present a new method, the q-SHATM and to use it to obtain new numerical solutions for a NWS equation.
In light of developments, this paper proposes to investigate the use of the q-HSATM to solve the time-fractional Newell–Whitehead–Segel equation numerically, and to compare the results with those obtained using a more recent technique.
The first aim of this study is to introduce the q-homotopy Shehu analysis transform method. The second aim is to solve a time-fractional Newell–Whitehead–Segel equation for the first time with the newly produced hybrid method. Several previously unmentioned solutions in the literature are retrieved and their graphic characteristics are plotted in their entirety. The main motivation of writing this paper is to obtain the new numerical solutions of a time-fractional Newell–Whitehead–Segel equation by using a new hybrid method, namely the q-homotopy Shehu analysis transform method (q-HSATM). Also, it has been observed that the results obtained from the table give better results than the LTDM [50] in the literature.
The structure of this paper is as follows. In Sect. 2, we provide a quick recap of some of the preliminary definitions of the Caputo fractional derivative and other conclusions that can be helpful in the study of fractional differential equations. Considering the issue at hand, a potential q-HSATM solution procedure is presented in Sect. 3. Convergence of the suggested approach is given in Sect. 4. The approximate solutions are found using q-HSATM on several numerical test situations presented in Sect. 5. Section 6 contains the discussion and results. Finally, the conclusion is given.
2 Preliminaries
Several fundamental definitions are provided in this section.
Definition 1
The Riemann–Liouville fractional integral is described as
Definition 2
The Caputo fractional derivative (CFD) is given by
where \({n -1< a \leq n}\), \({n \in N}\), \({x >0}\), \({f \in C_{-1}^{n} }\).
Definition 3
([57])
The Mittag–Leffler function \({E}_{{a}}\) is defined as
Definition 4
([33])
The Shehu transform (ST) of the function \({f}({t})\) is given by
Definition 5
([33])
If \({V} ( {s}, {u} )\) is the ST of the function \({f}({t})\), then the ST of CFD is defined by
3 The methodology of the q-homotopy Shehu analysis transform method
In this section, the q-HSATM for nonlinear FPDEs is presented. In order to illustrate the technique for the suggested method, the nonlinear FPDEs are written in standard operator form
with the initial condition
where A is a linear operator, N is a nonlinear operator, \(g(x,t)\) is a source term, and \({D}_{{t}}^{{a}}\) is a time-fractional derivative operator of order α.
Now, by performing a Shehu transform on Eq. (7) and using the initial condition, it is acquired as
The nonlinear operator by the assistance of HAM for a real function \({\varphi} ({x}, {t}; {q})\) is defined as
where \({q\epsilon} [ {0}, \frac{{1}}{ {n}} ] \).
This establishes a homotopy as follows:
where, \({h\neq 0}\) is an auxiliary parameter and S represents the Shehu transform. For \({q}={0}\) and \({q}= \frac{{1}}{ {n}}\), the results in Eq. (12) are, respectively, provided as
Therefore, by amplifying q from 0 to \(\frac{{1}}{{n}}\), the solution \({\varphi} ( {x}, {t}; {q} )\) converges from \({u}_{{0}} ( {x}, {t} )\) to the solution \({u} ( {x}, {t} )\). Employing the Taylor theorem around q and expanding \({\varphi} ( {x}, {t}; {q} )\), it is obtained as
where
Equation (14) converges at \({q}= \frac{{1}}{ {n}}\) for the appropriate \({u}_{{0}} ( {x}, {t} )\), n, and h. Then, we have one of the solutions of the original nonlinear equation of the form
If we differentiate the zeroth-order deformation Eq. (13) m times with respect to q and we divide by m!, respectively, then for \(q=0\), it is obtained as
where the vectors are defined by
When the inverse Shehu transform to Eq. (17) is applied, then it is obtained as
where
and
Here, \({H}_{{m}}\) is a homotopy polynomial and presented as
and
By utilizing q-HSATM, the series solution is defined by
4 Convergence analysis
Theorem 1
The solution for the nonlinear fractional differential Eq. (7) obtained by q-HSATM is unique for \(\forall {\alpha} {\epsilon} ({0},{1})\), where \({\alpha} =({n}+{\hslash} )+{\hslash} ({\rho} +{\delta} ){T}\).
Proof
The solution of nonlinear FPDEs Eq. (7) is presented as
where
Assume that u and w are two different solutions of Eq. (7), then with the help of the aforementioned equation, we obtain
Now, using the convolution theorem for the Shehu transform, it is obtained as
Then, using the integral mean-value theorem, it yields
As a result, we have \(( 1- \tau ) \vert w-u \vert \leq 0\). As \(\tau \in ( 0,1 )\), \(\vert w-u \vert =0\), which implies that \(w =u\). Hence, the solution is unique. □
Theorem 2
(Convergence theorem [58])
Assume that X is a Banach space and \({F}: {X} {\rightarrow} {X}\) is a nonlinear mapping. If the inequality
exists, then G has a fixed point in view of Banach fixed point theory [59]. Furthermore, for the arbitrary choice of \({a}_{{0}}\), \({b}_{{0}} {\in} {X}\), the sequence created by the q-HSATM converges to a fixed point of G and
Proof
Let us take a Banach space (\(C[J]\), \(\Vert . \Vert \)) of all continuous functions on J with the norm expressed as \(\Vert g(t) \Vert = \max_{t\in J} \vert g(t) \vert \).
Now, we demonstrate that the sequence \(\{ w_{n} \}\) is a Cauchy sequence in the Banach space:
Now, utilizing the convolution theorem for the Shehu transform, it is obtained as
Next, by the application of the integral mean-value theorem [59], it is obtained as
Let \(m=n+1\), then we obtain
By using the triangular inequality, we have
Since \(\tau \in ( 0,1 )\), \(1- \tau ^{m-n-1} <1\), then we obtain
For \(\Vert w_{1} - w_{0} \Vert <\infty \), so as \(m\rightarrow \infty \) then \(\Vert w_{m} - w_{n} \Vert \rightarrow 0\). Thus, the sequence \(\{ w_{n} \}\) is a Cauchy sequence in \(C[J]\), and so the sequence is convergent. □
5 The numerical solutions of the time-fractional Newell–Whitehead–Segel equation
Let us assune \(a =1\), \(h =2\), \(c =3\), and \(m=2\) for the nonlinear time-fractional Newell–Whitehead–Segel equation (NTFNWSE) [52, 60]:
with initial condition
where β is an arbitrary constant.
Now, by applying the Shehu transform to Eq. (39) and by using Eq. (40), then it is obtained as
The nonlinear operator by using Eq. (41) is described by
By applying the proposed algorithm, the mth-order deformation equation is defined by
where
On applying the inverse Shehu transform to Eq. (43), it is obtained as
By the use of the initial condition, it is acquired as
To find the values of \(u_{1} ( x,t )\), putting \(m=1\) in Eq. (45), it is obtained as
Similarly, to find values of \(u_{2} ( x,\mathrm{t} )\), putting \(m=2\) in Eq. (45), it is found as
In this way, the other terms are generated. Thus, the q-HSATM solution of Eq. (39) has the form
Substituting the values of \(\alpha =1\), \(n=1\), \(h=- 1\) in Eq. (49), the obtained results \(\sum_{m=1}^{M} u_{m} ( x,t ) ( \frac{1}{ n} )^{m}\) converge to the analytical solutions \(u ( x,t ) = \frac{- \frac{2}{3} \beta \exp (2\mathrm{t})}{- \frac{2}{3} + \beta - \beta \exp (2\mathrm{t})}\) of NTFNWSE when \(M\rightarrow \infty \).
Figure 1 demonstrates a 3D graph of the q-HSATM solution, the exact solution, and the absolute error in Eq. (49) for \(h =-1\), \(n =1\), \(\alpha =1\), \(\beta =1\).

(a) \(u ( x, t )\) solution of q-HSATM (b) Exact solution of \(u ( x, t )\) (c) Nature of absolute error \(= \vert u_{\mathrm{exact}} - u_{q-H S ATM} \vert \) at \(h =-1\), \(n =1\), \(\alpha =1\), \(\beta =1 \)
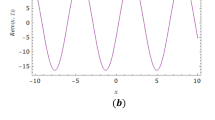
Figure 2 shows a 2D graph of Eq. (49) for different values of α.

\(u ( x,t )\) solution of q-HSATM with respect to t when \(\forall \mathrm{x} \in \mathbbm{{}\mathbb{R}\mathbbm{}}\) and \(\beta =1\) with different values of α
Table 1 shows the comparison of the absolute errors of the methods ATHPM, LTDM, and q-HSATM.
6 Result and discussion
For Eq. (39), the graphs of the temperature \({u}({x}, {t})\) for different values of \({\alpha} ={0}.{9}\), \({\alpha} ={0}.{7}\), \({\alpha} ={0}.{6}\), and \({\alpha} ={1}\) are drawn. Figure 1 shows three-dimensional graphs of the q-HSATM solution, the exact solution, and the absolute error at \({h} =-{1}\), \({n} ={1}\), \({\alpha} ={1}\), \({\beta} ={1} \). For increasing values of t, the two-dimensional graphs of the numerical solutions to this equation for various values α and the value \({\beta} ={1}\) are depicted in Fig. 2. Figure 2 shows that the temperature \({u}({x}, {t})\) rises as any values of the space variable x and the time variable t increases. It can be seen in Fig. 2 that as the α value approaches one, the temperature \({u}({x}, {t})\) converges. It is shown in Table 1 that the absolute errors of the third-order q-HSATM solution were obtained. Table 1 indicates that the absolute error increases significantly when any values of the space variable x and the value of time t increases. Table 1 demonstrates that while the q-HSATM yields the same results as ATHPM, it yields far more robust results than LTDM.
7 Conclusion
This work investigates the performance of NTFNWSE using q-HSATM. It is imperative to illustrate the influence of the fractional operator incorporated into the model being examined. Furthermore, the MAPLE software has been utilized to construct 2D and 3D graphs that depict the solutions to this equation for different values of α. The variability of the general structure of surface graphs created by the Maple software for Eq. (39) is evident. In addition, MAPLE software was used to obtain the graphs of the numerical solutions of this equation for the various α and \(\beta =1\) values. For NTFNWSE, it is observed that the general structure of surface graphs plotted in Maple software differs. The numerical solutions for NTFNWSE have been quickly and successfully obtained. Therefore, it may be extrapolated that q-HSATM is overly effective and robust for obtaining numerical solutions for various fractional nonlinear partial differential equations.
Availability of data and materials
The manuscript does not possess any accompanying data.
References
Veeresha, P., Prakasha, D.G., Baleanu, D.: Analysis of fractional Swift-Hohenberg equation using a novel computational technique. Math. Methods Appl. Sci. 43(4), 1970–1987 (2020)
Abu-Gdairi, R., Al-Smadi, M., Gumah, G.: An expansion iterative technique for handling fractional differential equations using fractional power series scheme. J. Math. Stat. 11(2), 29–38 (2015)
Baleanu, D., Golmankhaneh, A.K., Baleanu, M.C.: Fractional electromagnetic equations using fractional forms. Int. J. Theor. Phys. 48(11), 3114–3123 (2009)
Baleanu, D., Jajarmi, A., Hajipour, M.: On the nonlinear dynamical systems within the generalized fractional derivatives with Mittag–Leffler kernel. Nonlinear Dyn. 2018, 1–18 (2018)
Baleanu, D., Asad, J.H., Jajarmi, A.: New aspects of the motion of a particle in a circular cavity. Proc. Rom. Acad., Ser. A 19(2), 143–149 (2018)
Baleanu, D., Jajarmi, A., Bonyah, E., Hajipour, M.: New aspects of poor nutrition in the life cycle within the fractional calculus. Adv. Differ. Equ. 2018(1), 1 (2018)
Jajarmi, A., Baleanu, D.: Suboptimal control of fractional-order dynamic systems with delay argument. J. Vib. Control 24(12), 2430–2446 (2018)
Jajarmi, A., Baleanu, D.: A new fractional analysis on the interaction of HIV with CD4+ T-cells. Chaos Solitons Fractals 113, 221–229 (2018)
He, J.H.: Addendum: new interpretation of homotopy perturbation method. Int. J. Mod. Phys. B 20(18), 2561–2568 (2006)
Laskin, N.: Fractional quantum mechanics. Phys. Rev. E 62(3), 3135–3145 (2000)
Mainardi, F.: Fractional Calculus and Waves in Linear Viscoelasticity. Imperial College Press, London (2010)
Wazwaz, A.M.: A reliable modification of Adomian decomposition method. Appl. Math. Comput. 102(1), 77–86 (1999)
He, J.H.: Homotopy perturbation method: a new nonlinear analytical technique. Appl. Math. Comput. 135(1), 73–79 (2003)
He, J.H.: Homotopy perturbation method for solving boundary value problems. Phys. Lett. 350(1–2), 87–88 (2006)
He, J.H.: Addendum: new interpretation of homotopy perturbation method. Int. J. Mod. Phys. B 20(18), 2561–2568 (2006)
Alkan, A.: Improving homotopy analysis method with an optimal parameter for time-fractional Burgers equation. Karamanoğlu Mehmetbey Üniv. Mühendislik Doğa Bilim. Derg. 4(2), 117–134 (2022)
Turkyilmazoglu, M.: Convergence accelerating in the homotopy analysis method: a new approach. Adv. Appl. Math. Mech. 10(4), 925–947 (2018)
Yüzbaşı, Ş.: A collocation approach for solving two-dimensional second-order linear hyperbolic equations. Appl. Math. Comput. 338, 101–114 (2018)
Yüzbaşı, Ş.: Fractional Bell collocation method for solving linear fractional integro-differential equations. Math. Sci., 1-12 (2022)
Merdan, M., Anaç, H., Kesemen, T.: The new Sumudu transform iterative method for studying the random component time-fractional Klein-Gordon equation. SIGMA 10(3), 343–354 (2019)
Wang, K., Liu, S.: A new Sumudu transform iterative method for time-fractional Cauchy reaction-diffusion equation. SpringerPlus 5(1), 865 (2016)
Anaç, H., Merdan, M., Bekiryazıcı, Z., Kesemen, T.: Bazı Rastgele Kısmi Diferansiyel Denklemlerin Diferansiyel Dönüşüm Metodu ve Laplace-Padé Metodu Kullanarak Çözümü. Gümüşhane Üniv. Bilim. Enstitüsü Derg. 9(1), 108–118 (2019)
Ayaz, F.: Solutions of the system of differential equations by differential transform method. Appl. Math. Comput. 147(2), 547–567 (2004)
Kangalgil, F., Ayaz, F.: Solitary wave solutions for the KdV and mKdV equations by differential transform method. Chaos Solitons Fractals 41(1), 464–472 (2009)
Merdan, M.: A new applicaiton of modified differential transformation method for modeling the pollution of a system of lakes. Selçuk J. Appl. Math. 11(2), 27–40 (2010)
Zhou, J.K.: Differential Transform and Its Applications for Electrical Circuits. Huazhong University Press, Wuhan (1986)
Alfaqeih, S., Mısırlı, E.: On convergence analysis and analytical solutions of the conformable fractional FitzHugh–Nagumo model using the conformable Sumudu decomposition method. Symmetry 13(2), 243 (2021)
Alfaqeih, S., Bakıcıerler, G., Mısırlı, E.: New solution of conformable Fornberg-Whitham differential equation via conformable Sumudu decomposition method. TWMS J. Appl. Eng. Math. 12(2), 714–723 (2022)
Alfaqeih, S., Mısırlı, E.: A novel conformable Laplace transform for conformable fractional Lane–Emden type equations. Int. J. Comput. Math. 99(10), 2123–2138 (2022)
Erol, A.S., Anaç, H., Olgun, A.: Numerical solutions of conformable time-fractional Swift-Hohenberg equation with proportional delay by the novel methods. Karamanoğlu Mehmetbey Üniv. Mühendislik Doğa Bilim. Derg. 5(1), 1–24 (2023)
Kartal, A., Anaç, H., Olgun, A.: Numerical solution of conformable time fractional generalized Burgers equation with proportional delay by new methods. Karadeniz Bilim. Derg. 13(2), 310–335 (2023)
Kartal, A., Anaç, H., Olgun, A.: The new numerical solutions of conformable time fractional generalized Burgers equation with proportional delay. Gümüşhane Üniv. Bilim. Derg. 13(4), 927–938 (2023)
Maitama, S., Zhao, W.: New integral transform: Shehu transform a generalization of Sumudu and Laplace transform for solving differential equations (2019). arXiv preprint. arXiv:1904.11370
Akinyemi, L., Iyiola, O.S.: Exact and approximate solutions of time-fractional models arising from physics via Shehu transform. Math. Methods Appl. Sci. 43(12), 7442–7464 (2020)
Alfaqeih, S., Misirli, E.: On double Shehu transform and its properties with applications. Int. J. Anal. Appl. 18(3), 381–395 (2020)
Maitama, S., Zhao, W.: Homotopy analysis Shehu transform method for solving fuzzy differential equations of fractional and integer order derivatives. Comput. Appl. Math. 40(3), 1–30 (2021)
Kanth, A.R., Aruna, K., Raghavendar, K., Rezazadeh, H., İnç, M.: Numerical solutions of nonlinear time fractional Klein-Gordon equation via natural transform decomposition method and iterative Shehu transform method. J. Ocean Eng. Sci. (2021). https://doi.org/10.1016/j.joes.2021.12.002
Shah, R., Saad Alshehry, A., Weera, W.: A semi-analytical method to investigate fractional-order gas dynamics equations by Shehu transform. Symmetry 14(7), 1458 (2022)
Abujarad, E.S., Jarad, F., Abujarad, M.H., Baleanu, D.: Application of q-Shehu transform on q-fractional kinetic equation involving the generalizd hyper-Bessel function. Fractals 30(05), 2240179 (2022)
Sinha, A.K., Panda, S.: Shehu transform in quantum calculus and its applications. Int. J. Appl. Comput. Math. 8(1), 1–19 (2022)
Srivastava, H.M., Kumar, D., Singh, J.: An efficient analytical technique for fractional model of vibration equation. Appl. Math. Model. 45, 192–204 (2017)
Veeresha, P., Prakasha, D.G., Baskonus, H.M.: Solving smoking epidemic model of fractional order using a modified homotopy analysis transform method. Math. Sci. 13(2), 115–128 (2019)
Singh, J., Kumar, D., Baleanu, D., Rathore, S.: An efficient numerical algorithm for the fractional Drinfeld–Sokolov–Wilson equation. Appl. Math. Comput. 335, 12–24 (2018)
Prakasha, D.G., Veeresha, P., Baskonus, H.M.: Two novel computational techniques for fractional Gardner and Cahn-Hilliard equations. Comput. Math. Methods 1(2), 1–19 (2019). https://doi.org/10.1002/cmm4.1021
Veeresha, P., Prakasha, D.G., Baskonus, H.M.: New numerical surfaces to the mathematical model of cancer chemotherapy effect in Caputo fractional derivatives. Chaos 29, 013119 (2019). https://doi.org/10.1063/1.5074099
Veeresha, P., Prakasha, D.G., Qurashi, M.A., Baleanu, D.: A reliable technique for fractional modified Boussinesq and approximate long wave equations. Adv. Differ. Equ. 253, 1–23 (2019). https://doi.org/10.1186/s13662-019-2185-2
Veeresha, P., Prakasha, D.G., Magesh, N., Nandeppanavar, M.M., John, C.A.: Numerical simulation for fractional Jaulent–Miodek equation associated with energy-dependent Schrödinger potential using two novel techniques. Waves Random Complex Media, 1–22 (2019). https://doi.org/10.1080/17455030.2019.1651461
Prakash, A., Prakasha, D.G., Veeresha, P.: A reliable algorithm for time-fractional Navier-Stokes equations via Laplace transform. Nonlinear Eng. 8, 695–701 (2019)
Veeresha, P., Prakasha, D.G., Kumar, D.: An efficient technique for nonlinear time-fractional Klein-Fock-Gordon equation. Appl. Math. Comput. 364, 1–15 (2020). https://doi.org/10.1016/j.amc.2019.124637
Ayata, M., Ozkan, O.: A new application of conformable Laplace decomposition method for fractional Newell-Whitehead-Segel equation. AIMS Math. 5(6), 7402–7412 (2020)
Prakash, A., Goyal, M., Gupta, S.: Fractional variational iteration method for solving time-fractional Newell-Whitehead-Segel equation. Nonlinear Eng. 8, 164–171 (2019)
Areshi, M., Khan, A., Shah, R., Nonlaopon, K.: Analytical investigation of fractional-order Newell-Whitehead-Segel equations via a novel transform. AIMS Math. 7(4), 6936–6958 (2022)
Jassim, H.K.: Homotopy perturbation algorithm using Laplace transform for Newell-Whitehead-Segel equation. Int. J. Adv. Appl. Math. Mech. 2, 8–12 (2015)
Newell, A.C., Whitehead, J.A.: Finite bandwidth, finite amplitude convection. J. Fluid Mech. 38(2), 279–303 (1969)
Anaç, H., Merdan, M., Kesemen, T.: Solving for the random component time-fractional partial differential equations with the new Sumudu transform iterative method. SN Appl. Sci. 2(6), 1–11 (2020)
Oldham, K., Spanier, J.: The Fractional Calculus. Academic Press, New York (1974)
Mittag-Leffler, G.M.: Sur la nouvelle fonction. C. R. Acad. Sci. Paris 137, 554–558 (1903)
Kumar, D., Singh, J., Baleanu, D.: A new analysis for fractional model of regularized long-wave equation arising in ion acoustic plasma waves. Math. Methods Appl. Sci. 40(15), 5642–5653 (2017)
Magreñán, Á.A.: A new tool to study real dynamics: the convergence plane. Appl. Math. Comput. 248, 215–224 (2014)
Prakash, A., Goyal, M., Gupta, S.: Fractional variational iteration method for solving time-fractional Newell-Whitehead-Segel equation. Nonlinear Eng. 8(1), 164–171 (2019)
Jani, H.P., Singh, T.R.: Aboodh transform homotopy perturbation method for solving fractional-order Newell-Whitehead-Segel equation. Math. Methods Appl. Sci. (2022)
Acknowledgements
The authors would like to express their appreciation to the editor and the referees for their valuable suggestions on improvements of the original manuscript.
Funding
There is no funding.
Author information
Authors and Affiliations
Contributions
Phd. Anac prepared figures and proposed method. Mr. Bektas wrote the main manuscript. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bektaş, U., Anaç, H. A hybrid method to solve a fractional-order Newell–Whitehead–Segel equation. Bound Value Probl 2024, 38 (2024). https://doi.org/10.1186/s13661-023-01795-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-023-01795-2