
Abstract
In this paper, we consider the inverse problem of identifying the unknown source for the modified Helmholtz equation. We propose the Landweber iterative regularization method to solve this problem and obtain the regularization solution. Under the a priori and a posteriori regularization parameters choice rules, we all obtain the Hölder type error estimates between the exact solution and the regularization solutions. Several numerical examples are also provided to show that the Landweber iterative method works well for solving this problem.
Similar content being viewed by others


1 Introduction
The modified Helmholtz equation or the Yukawa equation which is pointed out in [1] appears in implicit matching schemes for the heat equation, in Debye-Huckel theory, and in the linearization of the Poisson-Boltzmann equation. The underlying free-space Green’s function is usually referred to as the Yukawa potential in nuclear physics. In physics, chemistry, and biology, when Coulomb forces are damped by screening effects, this Green’s function is also known as the screened Coulomb potential. Especially in microstretch elastic materials [2] and in the thermoelastodynamics of microstretch bodies [3, 4], the modified Helmholtz equation has been applied widely. In recent years, there are much research results on the inverse problem of the modified Helmholtz equation. The Cauchy problems associated with the modified Helmholtz equation have been studied by using different numerical methods, such as the Landweber method with boundary element method and the conjugate gradient method [5], the method of fundamental solutions (MFS) [6], the iteration regularization method [7], Tikhonov type regularization [8], Quasi-reversibility and truncation methods [9–11], Quasi-boundary regularization [12, 13], and so on. Inverse source problems arise in many branches of science and engineering, for example, heat conduction, crack identification, electromagnetic theory, geophysical prospecting, and pollutant detection. For the heat source identification, there have been a large number of research results for different forms of heat sources [14–22], and so on. But to the best of the authors’ knowledge, there were few papers for identifying the unknown source on the modified Helmholtz equation. In [23, 24], the authors used the quasi-reversibility method to identify the unknown source of the modified Helmholtz equation on half strip region and half infinite region. In [25], the authors used the simplified Tikhonov regularization method to identify the unknown source for the modified Helmholtz equation. In [26, 27], the authors used the Tikhonov regularization method to identify the unknown source for the modified Helmholtz equation. But in [23–27], the regularization parameters are selected by the a priori rule. There is a defect for any a priori method, i.e., the a priori choice of the regularization parameter depends on the a priori bound E of the unknown solution. However, the a priori bound E cannot be known exactly in practice, and using a wrong constant E may lead to a badly regularized solution.
In this paper, we use the Landweber iterative method to identify the unknown source of the modified Helmholtz equation. The Landweber iterative method is a very popular algorithm and regularization method in inverse problem research. In [28], the authors used the method of iterative method to solve linear inverse problems. Under the posterior regularization parameter choice rule, the convergence order of the regularization solution is obtained. In [29], the authors used the iterative method to solve a nonlinear problems. We not only give the a priori choice of the regularization parameter, but also give the a posteriori choice of the regularization parameter which depends only on the measurable data. Moreover, we compare the effectiveness between the a posteriori choice rule and the a priori choice rule. To the best of the authors’ knowledge, there are few papers choosing the regularization parameter by the a posteriori rule for this problem. We consider the modified Helmholtz equation as follows:
where \(g(x)\) is given function in \(L^{2}(0, \pi)\), and \(f(x)\) is an unknown source. The constant k is the wave number. We use the additional condition \(u(x,1)=g(x)\) to determine the unknown source \(f(x)\). Physically, \(g(x)\) can be measured, there will be measurement errors, and we assume the function \(g^{\delta }(x)\in L^{2}(0, \pi)\) as the measurable data which satisfies
where the constant \(\delta >0\) represents a bound on the measurement error, \(\Vert \cdot \Vert \) is \(L^{2}(0,\pi)\) norm and δ is a noise level.
The remainder of the paper is organized as follows. In Section 2, we formulate some preliminary results. In Section 3, we present the Landweber iterative regularization method. The convergence estimates under an a priori and an a posteriori choice rules will be given in Section 4. Numerical examples are given to show the effectiveness of our method in Section 5. We give a brief conclusion in Section 6.
2 Some auxiliary results
In this section, we give some auxiliary results, which are very useful for our main conclusion.
Lemma 2.1
For \(0\leq h\leq 1\) and \(n\geq 1\), the following inequalities hold:
Proof
Denote \(\rho (h)=(1-h)^{n}h\) and \(\beta (h)=1-(1-h)^{n}-nh\), then
Setting \(\rho '(h)=0\), we have
Note that \(\rho (0)=\rho (1)=0\), \(\rho (h)\) has a unique maximal value at \(h=\frac{1}{n+1}\). Therefore,
Because \(\beta '(h)\leq 0\) and \(\beta (0)=0\), we can easily obtain \(\beta (h)\leq 0\).
This ends the proof of the Lemma 2.1. □
Lemma 2.2
For \(0< h\leq 1\), \(0<\alpha \leq 1\) and \(n\geq 1\), Lemma 2.1 can be strengthened as the following inequalities:
Proof
In fact, using the established results (2.1), we can get
□
Lemma 2.3
For \(t\geq 1\), we have
Lemma 2.4
For \(t\geq 1\), we have
3 Landweber iterative regularization method
By the method of separation of variables, the solution of problem (1.1) is given by
where \(f_{n}=(f,X_{n})\) and \(X_{n}=\sqrt{\frac{2}{\pi }}\sin(nx)\) (\(n=1,2, \ldots\)) is a set of standard orthogonal bases on the space interval \(L^{2}(0,\pi)\).
Using \(u(x,1)=g(x)\), we obtain
where \(g_{n}=(g,X_{n})\).
Define operator \(K: f\rightarrow g\), then
The operator K is a linear self adjoint compact operator, and its singular value is
we have
Hence we obtain
and
When \(n\rightarrow \infty \), \(\mu_{n}^{-1}=o(n^{2})\), the exact data function \(g(x)\) must be at least two times lower, but the \(g^{\delta }(x)\), which belongs to \(L^{2}(0, \pi)\), does not necessarily have the same negative power drop of 2. So problem (1.1) is ill-posed. Assume for the unknown source \(f(x)\) there exists an a priori bound as follows:
where \(E>0\) is a constant and \(\Vert f(\cdot)\Vert _{p}\) is defined as follows:
Theorem 3.1
If \(\Vert f(\cdot)\Vert _{p}\leq E\), \(p>0\), then
where \(C_{1}:=2^{\frac{p}{p+2}}\).
Proof
From (3.5), (3.8), Lemma 2.3 and the Hölder inequality, we get
where \(C_{1}:=2^{\frac{p}{p+2}}\).
We complete the proof of Theorem 3.1. □
Now, we use the Landweber iterative method to obtain the regularization solution for (1.1) and rewrite the equation \(Kf=g\) in the form \(f=(I-aK^{*}K)f+aK^{*}g\) for some \(a>0\). Iterate this equation, i.e.,
where m is iterative step number, and is selected regularization parameter. a is called relaxation factor, and satisfies \(0< a<\frac{1}{ \Vert K\Vert ^{2}}\). For K being a self adjoint operator, we obtain
Using (3.3), we get
where \(g_{n}^{\delta }=(g^{\delta },X_{n}(x))\).
4 Error estimate under two parameters choice rules
In this section, we will give two convergence estimates under an a priori regularization parameter choice rule and an a posteriori regularization parameter choice rule, respectively.
4.1 An a priori regularization parameter choice rule
Theorem 4.1
Let \(f(x)\) given by (3.6) be the exact solution of problem (1.1). Let \(f^{m,\delta }(x)\) given by (3.12) be the regularization Landweber iterative approximation solution. Choosing the regularization parameter \(m=[z]\), where
then we obtain the following error estimate:
where \([z]\) denotes the largest integer less than or equal to z, and \(C_{2}=\sqrt{a}+(\frac{4p}{a})^{\frac{p}{4}}\) is a constant dependent on a, p.
Proof
Due to the triangle inequality, we know
From condition (1.2) and (3.12), we have
where \(H(n):=\frac{1-(1-a\mu_{n}^{2})^{m}}{\mu_{n}}\).
By Lemma 2.1, we get
i.e.,
So
On the other hand, using (3.7), we have
where \(Q(n):=(1-a(-\frac{1-e^{-\sqrt{n^{2}+k^{2}}}}{n^{2}+k^{2}})^{2})^{m}(n ^{2}+k^{2})^{-\frac{p}{2}}\).
Using Lemma 2.2 and Lemma 2.4, we have
Let \(t:=n^{2}+k^{2}\),
Let \(t_{0}\) satisfy \(F'(t_{0})=0\), and we easily get
Thus
i.e.,
Thus we obtain
Hence
Combining (4.5) and (3.12), we choose \(m=[z]\), and get
where \(C_{2}:=\sqrt{a}+(\frac{4p}{a})^{\frac{p}{4}}\).
We complete the proof of Theorem 4.1. □
4.2 An a posteriori regularization parameter choice rule
We consider the a posteriori regularization parameter choice in the Morozov discrepancy, and construct regularization solution sequences \(f^{m,\delta }(x)\) by Landweber iterative method. Assume \(\tau >1\) is a given fixed constant. Stop the algorithm at the first occurrence of \(m=m(\delta)\in \mathbb{N}_{0}\) with
where \(\Vert g^{\delta }\Vert \geq \tau \delta\).
Lemma 4.2
Let \(\gamma (m)=\Vert Kf^{m,\delta }(\cdot)-g^{\delta }(\cdot)\Vert \), then we have the following conclusions:
-
(a)
\(\gamma (m)\) is a continuous function;
-
(b)
\(\lim_{m\rightarrow 0}\gamma (m)=\Vert g^{\delta }\Vert \);
-
(c)
\(\lim_{m\rightarrow +\infty }\gamma (m)=0\);
-
(d)
\(\gamma (m)\) is a strictly decreasing function, for any \(m\in (0,+\infty)\).
Lemma 4.3
For fixed \(\tau >1\), and Landweber’s iteration method with stopping rule (4.14), we can see that the regularization parameter \(m=m(\delta,g^{\delta })\in \mathbb{N}_{0}\) satisfies
Proof
From (3.12), we have the representation
for every \(g\in H^{2}(\Omega)\) and thus
From \(\vert 1-a\mu_{n}^{2}\vert <1\), we conclude that \(\Vert KR_{m-1}-I\Vert \leq 1\).
We know that m is the minimum value that satisfies \(\Vert KR_{m}g^{\delta }-g^{\delta }\Vert =\Vert Kf^{m,\delta }-g^{\delta }\Vert \leq \tau \delta \). Hence
On the other hand, using (3.7), we obtain
Let
so
Using Lemma 2.4, we have
Let
suppose \(t_{\ast }\) satisfy \(G'(t_{\ast })=0\), we easily get
so
Combining (4.18) with (4.21), we obtain (4.15). □
Theorem 4.4
Let \(f(x)\) given by (3.6) be the exact solution of problem (1.1). Let \(f^{m,\delta }(x)\) given by (3.12) be the Landweber iterative regularization approximation solution. The regularization parameter is given by (4.14), then we have the following error estimate:
where \(C_{3}=(2(p+2))(\frac{1}{\tau -1})^{\frac{2}{p+2}}\) is a constant.
Proof
Using triangle inequality, we obtain
By (4.5) and Lemma 4.3, we get
where \(C_{3}=(2(p+2))^{\frac{1}{2}}(\frac{1}{\tau -1})^{\frac{2}{p+2}}\).
For the second part of the right side of (4.24), we have
Using (1.2) and (4.15), we have
Due to
and using Theorem 3.1, we have
Therefore,
This completes the proof of Theorem 4.4. □
5 Numerical implementation and numerical examples
In this section, we present numerical results for examples cases to show the effectiveness of our proposed method.
By (3.2), we have
We use the former N sum to approximate the infinite sum as follows:
Let \(x_{i}=\frac{(i-1)\pi }{M}\), \(i=1,2,\ldots, M+1\). The integral is discretized by the Simpson formula, then (5.1) can be divided into
So
where
The matrix form of (5.4) is as follows:
where
Because K is the adjoint operator, \(B^{\ast }=B\). The corresponding Landweber iterative equation is
In the computational procedure, we take \(p=1\). In discrete format, we take \(M=100\), \(N=6\) to compute the direct problem for the forward problem and choose \(M=200\), \(N=6\) to solve the inverse problem.
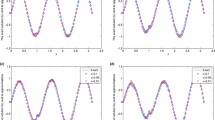
Example 1
Through calculating, we know that the function \(u(x,y)=(1-e^{-\sqrt{2}ky})\sin(kx)\) and the function \(f(x)=-2k^{2}\sin(kx)\) are satisfied with the problem (1.1) with exact data \(g(x)=(1-e^{-\sqrt{2}k})\sin(kx)\), and the a priori bound is
Noise data is generated by adding a random perturbation, that is,
where ε is relative error level. The total error level g is given by the following:
Figure 1 shows the numerical results of \(k=2\), \(\varepsilon =0.001\), \(\varepsilon =0.01\), respectively. In Figure 2, when \(\varepsilon =0.001\), we take \(k=4,5\) to solve this problem.

The comparison of numerical effects between the exact solution and its regularization solution for Example 1 , \(\pmb{k=2}\) : (a) \(\pmb{\varepsilon =0.001}\) , (b) \(\pmb{\varepsilon =0.01}\) .

The comparison of numerical effects between the exact solution and its regularization solution for Example 1 , \(\pmb{\varepsilon =0.001}\) : (a) \(\pmb{k=4}\) , (b) \(\pmb{k=5}\) .
It can be seen from Figures 1-2 that the Landweber iterative regularization method is very effective for solving the inverse problem of the unknown source identification of the modified Helmholtz equation. On the one hand, when the random disturbance increases, the result becomes worse. On the other hand, with the increase of k, the results are slightly worse, which is also consistent with our error estimates.
Example 2
Consider the following discontinuous function:
Figure 3 shows the numerical results of \(k=1\), \(\varepsilon =0.001\), \(\varepsilon =0.005\), respectively. In Figure 4, when the error is \(\varepsilon =0.01\), we take \(k=2,4\) to solve this problem. Figures 3-4 show the comparisons of the numerical effects between the exact solution and the regularization solution for the a priori and a posteriori regularization parameter choice rule with Example 2.

The comparison of numerical effects between the exact solution and its regularization solution for Example 2 , \(\pmb{k=1}\) : (a) \(\pmb{\varepsilon =0.001}\) , (b) \(\pmb{\varepsilon =0.005}\) .

The comparison of numerical effects between the exact solution and its regularization solution for Example 2 , \(\pmb{\varepsilon =0.01}\) : (a) \(\pmb{k=2}\) , (b) \(\pmb{k=4}\) .
Example 3
Consider the following discontinuous function:
Figure 5 shows the numerical results of \(k=1\), \(\varepsilon =0.01\), \(\varepsilon =0.05\), respectively. In Figure 6, when the error is \(\varepsilon =0.001\), we take \(k=2,4\) to solve this problem. Figures 5-6 show the comparisons of the numerical effects between the exact solution and the regularization solution for the a priori and a posteriori regularization parameter choice rule with Example 3.

The comparison of numerical effects between the exact solution and its regularization solution for Example 3 , \(\pmb{k=1}\) : (a) \(\pmb{\varepsilon =0.01}\) , (b) \(\pmb{\varepsilon =0.05}\) .

The comparison of numerical effects between the exact solution and its regularization solution for Example 3 , \(\pmb{\varepsilon =0.001}\) : (a) \(\pmb{k=2}\) , (b) \(\pmb{k=4}\) .
From Figures 3-6, we can find that the smaller ε, the better the computed approximation is. Moreover, we can also easily find that the a posteriori parameter choice rule works better than the a priori parameter choice rule. This is consistent with our theoretical analysis.
6 Conclusion
In this paper, we investigated the inverse source problem for the modified Helmholtz equation. The conditional stability was given. The Landweber iterative method is proposed to obtain a regularization solution. The error estimates were obtained under an a priori regularization parameter choice rule and an a posteriori regularization parameter choice rule, respectively. Meanwhile, numerical examples verifies that the Landweber iterative method has efficiency and accuracy.
References
Cheng, HW, Huang, JF, Leiterman, TJ: An adaptive fast solver for the modified Helmholtz equation in two dimensions. J. Comput. Phys. 211(2), 616-637 (2006)
Marin, M: A domain of influence theorem for microstretch elastic materials. Nonlinear Anal., Real World Appl. 11(5), 3446-3452 (2010)
Marin, MI, Agarwal, RP, Abbas, IA: Effect of intrinsic rotations, microstructural expansion and contractions in initial boundary value problem of thermoelastic bodies. Bound. Value Probl. 2014, 129 (2014)
Marin, M, Lupu, M: On harmonic vibrations in thermoelasticity of micropolar bodies. J. Vib. Control 4(5), 507-518 (1998)
Marin, L, Elliott, L, Heggs, PJ, Ingham, DB, Lesnic, D, Wen, X: Conjugate gradient-boundary element solution to the Cauchy problem for Helmholtz-type equations. Comput. Mech. 31(3-4), 367-377 (2003)
Marin, L, Elliott, L, Heggs, P, Ingham, D, Lesnic, D, Wen, X: BEM solution for the Cauchy problem associated with Helmholtz-type equations by the Landweber method. Eng. Anal. Bound. Elem. 28(9), 1025-1034 (2004)
Wei, T, Hon, Y, Ling, L: Method of fundamental solutions with regularization techniques for Cauchy problems of elliptic operators. Eng. Anal. Bound. Elem. 31(4), 373-385 (2007)
Cheng, H, Zhu, P, Gao, J: A regularization method for the Cauchy problem of the modified Helmholtz equzation. Math. Methods Appl. Sci. 38, 3711-3719 (2015)
Qin, HH, Wen, DW: Tikhonov type regularization method for the Cauchy problem of the modified Helmholtz equation. Appl. Math. Comput. 203, 617-628 (2008)
Qin, HH, Wei, T: Quasi-reversibility and truncation methods to solve a Cauchy problem of the modified Helmholtz equation. Math. Comput. Simul. 80, 352-366 (2009)
Shi, R, Wei, T, Qin, HH: A fourth-order modified method for the Cauchy problem of the modified Helmholtz equation. Numer. Math., Theory Methods Appl. 2, 326-340 (2009)
Xiong, XT, Shi, WX, Fan, XY: Two numerical methods for a Cauchy problem for modified Helmholtz equation. Appl. Math. Model. 35, 4951-4964 (2011)
Nguyen, HT, Tran, QV, Nguyen, VT: Some remarks on a modified Helmholtz equation with inhomogeneous source. Appl. Math. Model. 37(1), 793-814 (2013)
Li, GS: Data compatibility and conditional stability for an inverse source problem in the heat equation. Appl. Math. Comput. 173, 566-581 (2006)
Dou, FF, Fu, CL: Determining an unknown source in the heat equation by a wavelet dual least squares method. Appl. Math. Lett. 22, 661-667 (2009)
Yang, F, Fu, CL: A simplified Tikhonov regularization method for determining the heat source. Appl. Math. Model. 34, 3286-3299 (2010)
Farcas, A, Lesnic, D: The boundary-element method for the determination of a heat source dependent on one variable. J. Eng. Math. 54, 375-388 (2006)
Liu, CH: A two-stage LGSM to identify time-dependent heat source through an internal measurement of temperature. Int. J. Heat Mass Transf. 52, 1635-1642 (2009)
Ma, YJ, Fu, CL, Zhang, YX: Identification of an unknown source depending on both time and space variables by a variational method. Appl. Math. Model. 36, 5080-5090 (2012)
Hasanov, A: Identification of spacewise and time dependent source terms in 1D heat conduction equation from temperature measurement at a final time. Int. J. Heat Mass Transf. 55, 2069-2080 (2012)
Cheng, W, Ma, YJ, Fu, CL: Identifying an unknown source term in radial heat conduction. Inverse Probl. Sci. Eng. 20, 335-349 (2012)
Yan, L, Fu, CL, Yang, FL: The method of fundamental solutions for the inverse heat source problem. Eng. Anal. Bound. Elem. 32, 216-222 (2008)
Yang, F, Fu, CL, Li, XX: The inverse problem of identifying the unknown source for the modified Helmholtz equation. Acta Math. Sci. 32A(3), 557-565 (2012)
Li, XX, Yang, F, Liu, J, Wang, L: The quasireversibility regularization method for identifying the unknown source for the modified Helmholtz equation. J. Appl. Math. 2013, Article ID 245963 (2013).
Yang, F, Guo, HZ, Li, XX: The simplied Thikhonov regulation method for identifying the unknown source for the modified Helmholtz equation. Math. Probl. Eng. 2011, Article ID 953492 (2011)
Gao, JH, Wang, DH, Peng, JG: A Tikhonov-type regularization method for identifying the unknown source in the modified Helmholtz equation. Math. Probl. Eng. 2012, Article ID 878109 (2012).
Zhao, JJ, Liu, SS, Liu, T: A comparison of regularization methods for identifying unknown source problem for the modified Helmholtz equation. J. Inverse Ill-Posed Probl. 22(2), 1-14 (2014)
Wang, LJ, Han, X, Liu, J, Chen, JJ: An improved iteration regularization method and application to reconstruction of dynamic loads on a plate. J. Comput. Appl. Math. 235(14), 4083-4094 (2011)
Scherzer, O: Convergence criteria of iterative methods based on Landweber iteration for solving nonlinear problems. J. Math. Anal. Appl. 194, 911-933 (1995)
Acknowledgements
The authors would like to thanks the editor and the referees for their valuable comments and suggestions that improve the quality of our paper. The work is supported by the National Natural Science Foundation of China (11561045, 11501272) and the Doctor Fund of Lan Zhou University of Technology.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The main idea of this paper was proposed by Fan Yang and Xiao Liu prepared the manuscript initially and performed all the steps of the proofs in this research. All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Yang, F., Liu, X. & Li, XX. Landweber iterative regularization method for identifying the unknown source of the modified Helmholtz equation. Bound Value Probl 2017, 91 (2017). https://doi.org/10.1186/s13661-017-0823-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-017-0823-8