
Abstract
Nano-switch structures are important control elements in nanoelectromechanical systems and have potential applications in future nanodevices. This paper analyzes the effects of surface effects, geometric nonlinearity, electrostatic forces, and intermolecular forces on the nonlinear bending behavior and adhesion stability of nano-switches. Based on the Von Karman geometric nonlinearity theory, four types of boundary conditions for the nano-switch structure were specifically calculated. The results show that surface effects have a significant impact on the nonlinear bending and adhesion stability of nano-switches. Surface effects increase the adhesion voltage of the nano-switch and decrease its adhesion displacement, and as the size of the nano-switch structure increases, the impact of surface effects decreases. A comparative analysis of the linear theory and the nonlinear theory results shows that the adhesion voltage predicted by the linear theory is smaller than that predicted by the nonlinear theory. The effect of geometric nonlinearity increases as the size of the nano-switch structure increases, as the distance between the electrodes increases, and as the aspect ratio of the nano-switch structure increases. These findings provide theoretical support and reference for the design and use of future nanodevices and nanoelectromechanical systems.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nano-switches are important control elements in nanoelectromechanical systems. Compared with conventional semiconductor switches, nano-switch structures are simple, small in size, light in weight, and have a short response time. They are of great significance for achieving self-control, improving automation and intelligence levels, and enhancing system reliability and balance. Nano-switches are also an important component of the design of next-generation information storage, exchange, and logic circuits [1]. A nano-switch consists of a movable electrode and a fixed electrode. When an external voltage is applied between the two electrodes, the movable electrode undergoes bending deformation due to the electric field force generated by the applied voltage. As the voltage increases, the deformation of the movable electrode increases. When the voltage reaches a certain value, the movable electrode loses stability and adheres to the fixed electrode [2, 3].
Due to the nanoscale dimensions of the nano switch, the initial gap between the movable and fixed electrodes is only a few hundred nanometers or even tens of nanometers. At this scale, the molecular interaction forces between the two electrodes, such as Van der Waals force and Casimir force, cannot be ignored. When the electrode spacing is greater than 20 nm, the Casimir force dominates, while when the electrode spacing is less than 20 nm, the Van der Waals force dominates. In order to analyze the effect of molecular interaction forces on the adhesion characteristics of the nano switch, Ataei et al. [4] used the strain gradient theory to study the adhesion instability of a cantilevered nano actuator made of functionally graded materials under the influence of electrostatic and molecular interaction forces. Ramezani et al. [5, 6] used a distributed parameter model to study the effect of Casimir force on the adhesion parameters of a cantilevered nano switch, and investigated the adhesion parameters under three different conditions: no external voltage, no Casimir force, and both considered. Attia et al. [7] comprehensively studied the effect of various parameters such as material relaxation time, persistent modulus, material length scale parameter, Casimir force, Van der Waals force, initial gap, and beam length on the adhesion response of viscoelastic cantilever beams.
At the nanoscale, the ratio of surface atoms to internal atoms in a material increases. At this scale, the surface effect of the nano-switch cannot be ignored in its adhesion characteristics. Soroush et al. [8] developed a double-layer nano-switch model that combines surface energy and microstructure coupling effects based on surface elasticity theory and consistent coupling stress theory. Keivani et al. [9] used surface elasticity theory to study the static and dynamic adhesion behavior of nano-switches made of conductive cylindrical nanowires. Ma et al. [10] used the Euler–Bernoulli beam model to investigate the influence of surface effects (including residual surface stress and surface elasticity) on the adhesion instability of nanoelectromechanical systems (NEMS) electrostatic switches, taking into account the nonlinear effects generated by driving electrostatic forces and Casimir forces. Fu [11] proposed an improved continuum model for electrically-driven nanobeam by introducing surface elasticity and discussed the effect of surface energy on static and dynamic responses, adhesion voltage, and adhesion time.
Under complex working conditions, nano-switches often undergo geometrically nonlinear deformations, and the influence of large deformations cannot be ignored. Wang et al. [12] studied the instability of nano-switches under electrostatic forces and intermolecular forces based on a geometrically nonlinear Euler–Bernoulli beam theory that considers surface energy. Bhojawala et al. [13] studied the influence of Van der Waals force on the instability and free vibration characteristics of electrostatically driven fixed-end beams under axial forces, considering the effects of edge fields, nonlinearities caused by mid-plane tension, and Van der Waals forces. Dai et al. [14] studied NEMS and their instability and nonlinear dynamic responses, considering both geometric nonlinearities and inertial nonlinearities based on the theory of surface elasticity.
This article introduces surface effects through an equivalent elastic stiffness and surface energy model. Based on the Von Karman geometric nonlinear theory and the minimum potential energy principle, the nonlinear bending control equation and boundary conditions for the nano switch considering surface effects are derived. The Galerkin method is used to solve the control equation of the nano switch. The nonlinear bending and its adhesion stability of the nano switch are revealed, and the effects of surface effects, geometric dimensions, intermolecular forces, and electric field edge effects on the nonlinear bending and adhesion instability characteristics of the nano switch are discussed.
2 Nano-switch basic equation
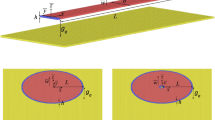
The schematic diagram of the nano-switch with different boundary conditions considering factors such as surface effects, Casimir force, and electric field force is shown in Fig. 1. In the model proposed in this paper, the nano-switch consists of a fixed electrode and a movable electrode. The length, width, and height of the movable electrode are denoted as l, b, and t, respectively, and the initial gap between the two plates is g. The coordinate system is established as shown in the figure, where the x-axis is established along the axis direction of the movable electrode and the y-axis is established perpendicular to the axis direction of the movable electrode. The displacement along the x and y axes is represented by u(x) and w(x), respectively, and both are functions of the spatial coordinate x.

Nano-switch structure diagram and cross section shape
In this paper's model, it is assumed that the initial distance between the two electrodes is greater than 20 nm, at which point the intermolecular force between the two electrodes is Casimir force [15].
In the above equation, ℏ is the reduced Planck constant, which is equal to the Planck constant divided by 2π and has a value of 1.055 × 10–34 J; c is the speed of light, which has a value of 2.998 × 108 ms−1.
When considering the electric field edge effect (Fig. 2), the electric field force between the two electrodes of the nano-switch can be expressed as [16, 17]:

Electric fringing field effect diagram
In the equation, V is the applied voltage, ε0 is the permittivity of vacuum, which has a value of 8.854 × 10–12 C2N−1 m−2.
The Casimir force and electric field force together constitute the sum of all distributed external forces acting on the movable electrode of the nano-switch.
In general, the distance between the two electrodes of the nano-switch is much smaller than the length of the movable electrode, so the mechanical behavior of the movable electrode is in a static elastic state. Therefore, we can analyze the mechanical behavior of the nano-switch using the Euler–Bernoulli beam model.
Due to the nanoscale size of the nano-switch, surface effects begin to emerge and affect the deformation and adhesion stability of the nano-switch. Therefore, the effective elastic modulus of the nano-switch considering surface effects should be determined by the elastic modulus and surface elastic modulus of the material. When the nano-switch undergoes bending deformation, the effective bending stiffness of the overall structure should be determined by the bending stiffness and surface bending stiffness of the nano-switch. In the model that considers large deformations, the effective tensile stiffness of the overall structure of the nano-switch should also be determined by the tensile stiffness and surface tensile stiffness of the nano-switch. Therefore, for a rectangular cross-section, the effective bending stiffness and effective tensile stiffness of the nano-switch structure considering surface effects can be expressed as [18, 19].
In which, E is the elastic modulus of the beam body itself, and ES is the surface elastic modulus.
The displacement component of the movable electrode can be expressed as:
Here, u0 is the displacement component of the neutral axis in the x-direction, and w0 is the displacement component of the neutral axis in the y-direction.
According to the Von Karman geometric nonlinear strain hypothesis, the axial strain of the movable electrode can be expressed as:
The strain energy generated when the nano-switch bends is given by:
Taking the variation of the above equation yields
in which
Surface energy is the additional free energy generated by the free surface of a solid. When a solid deforms, new surface area is created and external work is required, and this energy should also be included in the total potential energy. The surface energy generated by a nano-switch during bending deformation is [20].
where γ is the surface energy density; S0 is the initial surface area of the beam before deformation, which for a rectangular cross-section is 2(b + t)l; H is a coefficient related to the cross-section of the beam, which for a rectangular cross-section is 2γ(b + t).
Taking the variation of the above equation yields
The work done by the sum of distributed external forces on the movable electrode, which is composed of both the Casimir force and the electric field force is
Taking the variation of the above equation yields.
Therefore, the total potential energy can be expressed as:
Taking the variation of the above equation yields
According to the principle of minimum potential energy, setting δΠ(w) = 0 and δΠ(u) = 0 leads to the governing equations of the nano-switch considering the surface effect.
And the overall boundary conditions.
Integrating the first term of the control Eq. (16) over the length of the movable electrode l for twice and substituting the corresponding boundary conditions yields:
Substituting Eq. (21) into the second term of the control Eq. (17) results in a fourth-order nonlinear integro-differential control equation.
To facilitate calculations, we introduce the non-dimensional variables X = x/l and W = w/g, and further non-dimensionalize the control equation, which considers the surface effect. The resulting equation is:
where the definitions of the relevant parameters are as follows
For a fixed-supported boundary nano-switch, its boundary conditions are as follows.
For simply supported boundaries
For free boundary
3 Solving method
We use the Galerkin method to separate variables and solve the nonlinear integral–differential control Eq. (23). According to the natural modes, we select the displacement function of the movable electrode of the nano-switch, i.e., \(W\left( X \right) = \sum\limits_{i = 1}^{k} {C_{i} \varphi_{i} \left( X \right)}\), where k represents the degree of freedom of the movable electrode of the nanoswitch, Ci represents the displacement amplitude parameter, and φi(X) represents the eigenfunction of the itch order of the movable electrode. This paper mainly considers the condition of contact instability of the nano-switch when it has a single degree of freedom (k = 1). The displacement function of the movable electrode of the nano-switch under single degree of freedom can be expressed as.
The first-order shape functions φ(X) for the movable electrode of the four different types of nano-switches with different boundary conditions are shown in Table 1.
By substituting Eq. (28) and the first-order shape functions φ(X) from Table 1 into the control Eq. (24), the Galerkin method is used for separation of variables. Multiplying each term in Eq. (23) by φ(X) and integrating over the domain X ∈ [0, 1] of the dimensionless nano-switch length, the equilibrium equation that only depends on the displacement parameter C can be obtained.
in which
in which, \(\overline{S} = \int_{0}^{1} {\left[ {\frac{d\varphi \left( X \right)}{{dX}}} \right]}^{2} dX\).
When the applied voltage reaches the pull-in voltage, the nano-switch becomes unstable and the movable electrode rapidly adheres to the fixed electrode. For a nano-switch in the pull-in instability state, its acceleration must be zero, so when taking the derivative of the left-hand side of Eq. (29) with respect to the unknown parameter C, it is also equal to zero, which means:
By combining Eqs. (29) and (34) and eliminating the β2 term, the displacement undetermined parameter C in the stuck unstable state can be obtained, that is
Solving Eq. (35) yields the value of the displacement undetermined parameter CPI in the pull-in unstable state, and then the corresponding dimensionless pull-in voltage β2 value can be obtained by solving Eq. (29), namely,
Substituting the obtained value of the displacement parameter CPI into the fourth term of the control Eq. (25) gives the value of the pull-in voltage VPI.
Taking the two-end-fixed nano-switch as an example, the instability occurs at the center of the movable electrode W(X = 0.5) when it is in the state of adhesion instability. Therefore, by substituting the obtained displacement undetermined parameter CPI value under adhesion instability state and the first-order shape function in Table 1 into Eq. (28), the adhesion displacement YPI value of the two-end-fixed nano-switch can be obtained, that is,
The same applies to the remaining three types of boundary conditions.
4 Result and discussion
In the numerical examples, we take the geometric and material parameters of the nano-switch structure as follows: length l = 1 μm, cross-sectional height t = 50 nm, width b = 5t, initial gap between the two electrode plates g = 50 nm, beam elastic modulus E = 76GPa, surface elastic modulus Es = 1.22 Nm−1, and residual surface energy density γ = 0.89 Jm−2 [10].
Figure 3 shows the relationship between the maximum non-dimensional deflection wmax/g and the applied voltage for the four boundary conditions of the nano-switch. The results show that the maximum non-dimensional deflection wmax/g increases continuously with the increase of the applied voltage. When the applied voltage reaches the critical pull-in voltage VPI, the nano-switch undergoes pull-in instability and the movable electrode adheres to the fixed electrode. Surface effects will increase the pull-in voltage of the nano-switch. As the cross-sectional height t of the movable electrode increases from 50 to 80 nm with an increment of 10 nm, the pull-in voltage of the nano-switch increases and the influence of surface effects weakens.

The influence of surface effect on the relationship between maximum displacement and voltage of nano-switches
Figure 4 shows the influence of surface effect and electrode spacing g on the pull-in displacement YPI of the four types of boundary conditions in the nano-switch. The results show that as the electrode spacing g increases, the pull-in displacement YPI of the nano-switch also increases. The pull-in displacement YPI of the nano-switch considering surface effect is smaller than that without considering the surface effect. Moreover, as the cross-sectional height t of the movable electrode increases by 10 nm from 50 to 80 nm, the pull-in displacement YPI of the nano-switch decreases continuously, and the influence of the surface effect gradually decreases as well.

Effects of surface effect and electrode spacing g on the pull-in displacement YPI of nano-switches
Figure 5 shows the influence of the length-to-height ratio l/t of the movable electrode on the switching characteristics of the nano-switch for the four boundary conditions. It can be seen from the graph that as the length-to-height ratio l/t of the movable electrode increases, the pull-in voltage VPI of the nano-switch decreases. Similar to linear bending, this is because the increase in the length-to-height ratio l/t reduces the stiffness of the structure, making it more prone to deformation, and thus the pull-in voltage decreases.

Effect of l/t on the pull-in characteristics of nano-switches
Figure 6 shows the effect of electrode spacing g on the pull-in voltage VPI of the four boundary conditions for the nano-switch. The results indicate that as the electrode spacing g increases, the pull-in voltage VPI also increases. The pull-in voltage with and without considering surface effects are very close. Moreover, as the cross-sectional height t of the movable electrode increases from 50 to 80 nm in increments of 10 nm, the pull-in voltage of the nano-switch increases, consistent with the results obtained in Fig. 3.

Effect of electrode spacing g on the pull-in voltage VPI of nano-switches
Figure 7 shows the effect of Casimir force on the switching characteristics of the four boundary conditions. The results indicate that the switching voltage VPI considering the Casimir force is smaller than that without considering it, and the effect of Casimir force decreases as the electrode spacing g increases. At an external voltage V = 0, the maximum dimensionless deflection wmax/g of the switch considering the Casimir force is not zero, indicating that the switch also undergoes deformation due to the influence of the Casimir force in the absence of an external electric field.

The effect of Casimir force on the pull-in characteristics of nano-switches
Figure 8 shows the influence of the electric field edge effect on the pull-in voltage VPI of four boundary conditions for the nano-switch. The results indicate that considering the electric field edge effect will reduce the nonlinear bending pull-in voltage VPI of the nano-switch, and ignoring the effect of the electric field edge will over-predict the pull-in voltage VPI. As the electrode spacing g increases, the influence of the electric field edge effect also gradually increases.

Effect of electric field edge effect on the pull-in voltage VPI of nano-switches
Figure 9 shows a comparison of the pull-in characteristics between linear and nonlinear bending of the nano-switch. Comparing the results of linear and nonlinear bending, it can be concluded that the pull-in voltage VPI of the nano-switch with nonlinear bending is higher than that of the one with linear bending, and ignoring the effect of geometric nonlinear deformation will lead to an underestimation of the pull-in voltage VPI of the nano-switch. In addition, the influence of geometric nonlinear deformation on the pull-in voltage increases with the height t of the movable electrode cross-section, and also increases with the electrode spacing g.

Comparative analysis of linear bending and nonlinear bending pull-in characteristics of nano-switches
Figure 10 shows a comparison of the pull-in characteristics between linear and nonlinear bending of nano-switches with different length-to-height ratios. From the figure, it can be seen that the pull-in voltage VPI of the nano-switch with nonlinear bending is also higher than that of the one with linear bending. Moreover, the influence of geometric nonlinear deformation on the pull-in voltage of the nano-switch decreases as the length-to-height ratio l/t of the movable electrode increases.

Comparative analysis of linear bending and nonlinear bending pull-in characteristics of nano-switches with different aspect ratios l/t
5 Conclusion
This paper studies the influence of surface effects on the nonlinear bending and pull-in stability of nano-switches. Based on the Von Karman geometric nonlinear theory, the nonlinear bending control equation and boundary conditions of nano-switches considering surface effects are derived through the minimum potential energy principle, and the Galerkin method is used to solve the nonlinear bending control equation. The results show that surface effects increase the pull-in voltage and decrease the pull-in displacement of the nano-switch with nonlinear bending, and as the size of the nano-switch structure increases, the influence of surface effects decreases. Compared with the results of linear theory, the pull-in voltage of the nonlinear theory is larger. Geometric nonlinear effects increase with the size of the nano-switch structure and electrode spacing, but decrease with the increase of the length-to-height ratio of the nano-switch structure. This provides theoretical support and reference for the design and use of future nanodevices and nanomechanical systems.
References
Chaudhary R, Mudimela P R. Comprehensive review of low pull-in voltage RF NEMS switches. Microsystem Technologies, 2022: 1–15.
Haghshenas GH, Mahdavi AM, Hosseini M. Pull-in behavior of functionally graded micro/nano-beams for MEMS and NEMS switches. Microsyst Technol. 2019;25:3165–73.
Zhu J, Yao K, Dong X, et al. Pull-in behavior of electrostatically actuated stepped microbeams. Int J Mod Phys B. 2018;32(15):1850180.
Ataei H, Tadi BY. Size-dependent pull-in instability of electrically actuated functionally graded nano-beams under intermolecular forces. Iranian J Sci Technol Trans Mech Eng. 2016;40:289–301.
Ramezani A, Alasty A, Akbari J. Influence of van der Waals force on the pull-in parameters of cantilever type nanoscale electrostatic actuators. Microsyst Technol. 2006;12:1153–61.
Ramezani A, Alasty A, Akbari J. Pull-in parameters of cantilever type nanomechanical switches in presence of Casimir force. Nonlinear Anal Hybrid Syst. 2007;1(3):364–82.
Attia MA. Investigation of size-dependent quasistatic response of electrically actuated nonlinear viscoelastic microcantilevers and microbridges. Meccanica. 2017;52:2391–420.
Soroush R, Koochi A, Keivani M, et al. A bilayer model for incorporating the coupled effects of surface energy and microstructure on the electromechanical stability of NEMS. Int J Struct Stab Dyn. 2017;17(04):1771005.
Keivani M, Koochi A, Sedighi HM, et al. A nonlinear model for incorporating the coupled effects of surface energy and microstructure on the electromechanical stability of NEMS. Arab J Sci Eng. 2016;41:4397–410.
Ma JB, Jiang L, Asokanthan SF. Influence of surface effects on the pull-in instability of NEMS electrostatic switches. Nanotechnology. 2010;21(50): 505708.
Fu Y, Zhang J. Size-dependent pull-in phenomena in electrically actuated nanobeams incorporating surface energies. Appl Math Model. 2011;35(2):941–51.
Wang KF, Wang BL. Influence of surface energy on the non-linear pull-in instability of nano-switches. Int J Non-Linear Mech. 2014;59:69–75.
Bhojawala VM, Vakharia D P. Effect of van der Waals force on pull-in voltage, frequency tuning and frequency stability of NEMS devices. Microsyst Technol, 2017; 23.
Dai HL, Wang L. Surface effect on the pull-in instability of cantilevered nano-switches based on a full nonlinear model. Physica E. 2015;73:141–7.
Ru CQ. Simple geometrical explanation of Gurtin-Murdoch model of surface elasticity with clarification of its related versions. Sci China Phys Mech Astronomy. 2010;53:536–44.
Gupta R K. Electrostatic pull-in test structure design for in-situ mechanical property measurements of microelectromechanical systems (MEMS). Massachusetts Institute of Technology, 1997.
Dequesnes M, Rotkin SV, Aluru NR. Calculation of pull-in voltages for carbon-nanotube-based nanoelectromechanical switches. Nanotechnology. 2002;13(1):120.
Miller RE, Shenoy VB. Size-dependent elastic properties of nanosized structural elements. Nanotechnology. 2000;11(3):139.
Wang GF, Feng XQ. Effects of surface elasticity and residual surface tension on the natural frequency of microbeams. Appl Phys Lett. 2007;90(23): 231904.
Wang GF. Effects of surface energy on the mechanical performance of nanosized beams. J Comput Theor Nanosci. 2011;8(7):1173–7.
Acknowledgements
This work was supported by the National Natural Science Foundation of China [No. 11502197], the Science and Technology Department of Shaanxi Province of China [No. 2018JM1030] and China Scholarship Council CSC [No. 202008610039].
Author information
Authors and Affiliations
Contributions
Fan Yang and XuyangWang wrote the main manuscript text. Xuyang Wang and Xianlai Song prepared figures. Weilin Yang and Fan Yang reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yang, F., Wang, X., Song, X. et al. Analysis of nonlinear bending behavior of nano-switches considering surface effects. Discover Nano 19, 90 (2024). https://doi.org/10.1186/s11671-024-04030-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s11671-024-04030-8