
Abstract
Purpose
In this paper, we shall present an algorithm for solving more general singular second-order multi-point boundary value problems.
Methods
The algorithm is based on the quasilinearization technique and the reproducing kernel method for linear multi-point boundary value problems.
Results
Three numerical examples are given to demonstrate the efficiency of the present method.
Conclusions
Obtained results show that the present method is quite efficient.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Background
In this paper, we consider the following second-order multi-point boundary value problems:
where a(x), b(x), c(x)∈C[0,1], f(x,u) is continuous, 0 < ξ i , η i <1, a(0) = 0 or a(1) = 0 and a(x) ≠ 0,x ∈ (0,1); that is, the equation may be singular at x = 0,1.
Multi-point boundary value problems (BVPs) arise in a variety of applied mathematics and physics. For instance, the vibrations of a guy wire of uniform cross section composed of N parts of different densities can be set up as a multi-point BVP [1]; also, many problems in the theory of elastic stability can be handled by multi-point problems in the work of Timoshenko [2]. The existence and multiplicity of solutions of multi-point boundary value problems have been studied by many authors, see the works of Agarwal and Kiguradze, Du, Feng and Webb, Thompson and Tisdell [3–6], and the references therein. The shooting method is used to solve multi-point boundary value problems in the works of Kwong and Zou et al. [7, 8]. However, the shooting method is a trial-and-error method and is often sensitive to initial guess. This makes the computation by the conventional shooting method expensive and ineffective. Lin [9] introduced an algorithm for solving a class of multi-point BVPs by constructing reproducing kernel (RK) satisfying multi-point boundary conditions. However, both the method for obtaining RK satisfying multi-point boundary conditions and the form of obtained RK are very complicated in this method. Tatari and Dehghan [10] introduced the Adomian decomposition method for multi-point BVPs. Yao [11] proposed a successive iteration method for multi-point BVPs. However, there seems to be little discussion about numerical solutions of singular multi-point boundary value problems. Geng [12] proposed a method for a class of second-order three-point BVPs by converting the original problem into an equivalent integro-differential equation. Li and Wu [13, 14] presented RK method for singular three-point and four-point BVPs by constructing RK satisfying three-point or four-point boundary conditions. The goal of this paper is to give an effective method for solving more general singular multi-point boundary value problems.
The rest of the paper is organized as follows. In the next section, three numerical examples are presented. The conclusions of this paper are introduced in the ‘Conclusions’ section. The algorithm for solving singular multi-point boundary value problems is proposed in the section ‘Methods’.
Results and discussion
In this section, three numerical examples are studied to demonstrate the accuracy of the present method. The examples are computed using Mathematica 5.0. Results obtained by the method are compared with the analytical solution of each example and are found to be in good agreement with each other.
Example 1
Consider the following linear singular multi-point boundary value problem:
where . The exact solution is given by .
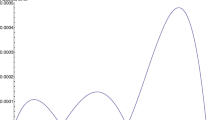
Using the present method, taking and initial approximation u0(x) = 0, the numerical results are given in Figure 1. From Figure 1, it is shown that the absolute errors is monotonically decreasing if N increases.

Figures of absolute errors.|u1,11(x) − u(x)|, |u1,51(x) − u(x)| for Example 1.
Example 2
Consider the following nonlinear singular multi-point boundary value problem:
where . The exact solution is given by u(x) = .
Using the present method, taking k = 3, and initial approximation u0(x) = 0, the numerical results are given in Figure 2. From Figure 2, we can see that the approximate solutions are in good agreement with exact solutions.

Figures of absolute errors.|u3,11(x) − u(x)|, |u3,51(x) − u(x)| for Example 2.
Example 3
The method discussed in the paper is finally tested on a sandwich problem. The shear deformation u(x) of sandwich beams is governed by a linear third-order differential equation with its boundary conditions at three different points [15]:
The exact solution is given by u(x) = . The method was tested for r = 1, k = 5, and 10, and the results are compared with the exact solution. Using our method, taking n = 1, N = 11,51, , the absolute errors ∣un,N(x) − u(x) ∣ between the approximate solution and exact solution are given in Tables 1 and 2. Numerical results compared with that of Tirmizi et al. [15] show that the accuracy of approximate solutions obtained using the present method is higher.
Discussion
The method introduced in the work of Geng [12] can only be used to solve special multi-point BVPs with one multi-point boundary condition, whereas the present method can be extended to general nonlocal BVPs with linear nonlocal boundary conditions. Comparing with that of Lin’s work [9], this paper provide a simpler method for constructing reproducing kernel satisfying linear nonlocal boundary conditions. A major advantage of the present method over the Adomian decomposition method [10] is that it can avoid unnecessary computation in determining the unknown parameters.
Conclusions
In this paper, we introduce an algorithm for solving singular second-order multi-point BVPs. The present method is based on the reproducing kernel method and the quasilinearization technique. Results of numerical examples show that the present method is an accurate and reliable analytical technique for singular multi-point BVPs.
Methods
Quasilinearization technique for singular multi-point BVP (Equation 1)
To solve Equation 1, the quasilinearization technique is used to reduce Equation 1 to a sequence of linear problems. By choosing a reasonable initial approximation u0(x) for the function u(x) in f(x,u) and expanding f(x,u) around the function u0(x)
In general, one can write for k = 1,2,⋯
Hence, we can obtain the following iteration formula for Equation 1:
where , , u0(x) is the initial approximation.
Therefore, to solve singular multi-point BVP (Equation 1), it suffices for us to solve the series of linear problem (Equation 2).
Reproducing kernel method for solving Equation 2
In order to solve Equation 2 using the RKM presented in previous works [16–21], it is necessary to construct a reproducing kernel space in which every function satisfies the multi-point boundary conditions of Equation 2.
First, we construct the following reproducing kernel space.
Reproducing kernel Hilbert space W3[0,1] is defined as follows: W3[0,1] = {u(x)∣ is an absolutely continuous real value functions, . The inner product and norm in W3[0,1] are given, respectively, by the following:
and
Using the works of Cui [16, 17], it is easy to obtain its reproducing kernel:
where .Next, we construct a reproducing kernel space in which every function satisfies .
Definition 1
.
Clearly, is a closed subspace of W3[0,1], and therefore, it is also a reproducing kernel space.
Put . The following theorem give its reproducing kernel.
Theorem 1
If L1xL1yk(x,y) ≠ 0, then the reproducing kernel k αβ of is given by the following:
where the subscript x by the operator L1 indicates that the operator L1 applies to the function of x.
Proof
It is easy to see that , and therefore .
For , obviously, L1yu(y) = 0; it follows that
that is, k1(x,y) is of ‘reproducing property’. Thus, k1(x,y) is the reproducing kernel of , and the proof is complete. □
Similarly, we construct a reproducing kernel space which is a closed subspace of .
Definition 2
, that is, .
Put . By the proof of Theorem 1, it is easy to see that
Theorem 2
The reproducing kernel k αβ of is given by the following:
In Equation 2, put c k (x)v(x), it is clear that is a bounded linear operator. Put and where is the RK of W1[0,1], L∗ is the adjoint operator of L. The orthonormal system of can be derived from the Gram-Schmidt orthogonalization process of : c
By the RKM presented in previous works [16–19], we have the following theorem.
Theorem 3
For Equation 2, if is dense on [0,1], then is the complete system of and ψ i (x) = L s k2(x,s)|s = xi.
Theorem 4
If is dense on [0,1] and the solution of Equation 2 is unique, then the solution of Equation 2 is as follows:
where .
Now, the approximate solution u k (x) can be obtained by taking finitely many terms in the series representation of u k (x) and
Lemma 1
If , then there exists a constant c such that , .
From Lemma 1, by convergence of uk,N(x) in the sense of norm, it is easy to obtain the following theorem.
Theorem 5
The approximate solution uk,N(x) and its derivatives are all uniformly convergent.
References
Moshiinsky M: Sobre los problemas de condiciones a la frontiera en una dimension de caracteristicas discontinuas. Bol. Soc. Mat. Mexicana 1950, 7: 1–25.
Timoshenko S: Theory of Elastic Stability. McGraw-Hill, New York; 1961.
Agarwal RP, Kiguradze I: On multi-point boundary value problems for linear ordinary differential equations with singularities. J. Math. Anal. Appl 2004, 297: 131–151. 10.1016/j.jmaa.2004.05.002
Du ZJ: Solvability of functional differential equations with multi-point boundary value problems at resonance. Computers and Mathematics with Appl 2008, 55: 2653–2661. 10.1016/j.camwa.2007.10.015
Feng W, Webb JRL: Solvability of m-point boundary value problems with nonlinear growth. J. Math. Anal. Appl 1997, 212: 467–480. 10.1006/jmaa.1997.5520
Thompson HB, Tisdell C: Three-point boundary value problems for second-order, ordinary, differential equation. Math. Computer Modell 2001, 34: 311–318. 10.1016/S0895-7177(01)00063-2
Kwong MK: The shooting method and multiple solutions of two/multi-point BVPs of second-order ODE. Electronic J. of Qualitative Theory of Differential Equations 2006, 6: 1–14.
Zou YK, Hu QW, Zhang R: On the numerical studies of multi-point boundary value problem and its fold bifurcation. Appl. Mathematics and Computation 2007, 185: 527–537. 10.1016/j.amc.2006.07.064
Lin YZ, Lin JN: Numerical algorithm about a class of linear nonlocal boundary value problems. Appl. Math. Lett 2010, 23: 997–1002. 10.1016/j.aml.2010.04.025
Tatari M, Dehghan M: The use of the Adomian decomposition method for solving multipoint boundary value problems. Phys. Scr 2006, 73: 672–676. 10.1088/0031-8949/73/6/023
Yao Q: Successive iteration and positive solution for nonlinear second-order three-point boundary value problems. Comput. Math. Appl 2005, 50: 433–444. 10.1016/j.camwa.2005.03.006
Geng FZ: Solving singular second order three-point boundary value problems using reproducing kernel Hilbert space method. Appl. Math. Comput 2009, 215: 2095–2102. 10.1016/j.amc.2009.08.002
Wu BY, Li XY: Application of reproducing kernel method to third order three-point boundary value problems. Appl. Math. Comput 2010, 217: 3425–3428. 10.1016/j.amc.2010.09.009
Li XY, Wu BY: Reproducing kernel method for singular fourth order four-point boundary value problems. Bull. Malays. Math. Sci. Soc 2011, 34: 147–151.
Tirmizi IA, Twizell EH, Islam SU: A numerical method for third-order non-linear boundary-value problems in engineering. Int. J. Computer Mathematics 2005, 82: 103–109. 10.1080/0020716042000261469
Cui MG, Lin YZ: Nonlinear Numerical Analysis in Reproducing Kernel Space. Nova Science Pub Inc, Hauppauge, ; 2009.
Cui MG, Geng FZ: Solving singular two-point boundary value problem in reproducing kernel space. J. Comput. Appl. Mathematics 2007, 205: 6–15. 10.1016/j.cam.2006.04.037
Geng FZ, Cui MG: Solving singular nonlinear second-order periodic boundary value problems in the reproducing kernel space. Appl. Mathematics and Computation 2007, 192: 389–398. 10.1016/j.amc.2007.03.016
Geng FZ, Cui MG: A reproducing kernel method for solving nonlocal fractional boundary value problems. Appl. Mathematics Lett 2012, 25: 818–823. 10.1016/j.aml.2011.10.025
Geng FZ: A novel method for solving a class of singularly perturbed boundary value problems based on reproducing kernel method. Appl. Mathematics and Computation 2011, 218: 4211–4215. 10.1016/j.amc.2011.09.052
Mohammadi M, Mokhtari R: Solving the generalized regularized long wave equation on the basis of a reproducing kernel space. J. of Comput. Appl. Mathematics 2011, 235: 4003–4014. 10.1016/j.cam.2011.02.012
Acknowledgements
The authors would like to express their thanks to the unknown referees for their careful reading and helpful comments. This work is supported by the National Science Foundation of China (11126222).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
XL carried out the nonlocal BVPs studies, participated in the sequence alignment, and drafted the manuscript. BW carried out the numerical tests. Both authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Li, X., Wu, B. Reproducing kernel method for singular multi-point boundary value problems. Math Sci 6, 16 (2012). https://doi.org/10.1186/2251-7456-6-16
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2251-7456-6-16