
Abstract
In this article, a delay-differential equation modeling a bidirectional associative memory (BAM) neural networks (NNs) with reaction-diffusion terms is investigated. A feedback control law is derived to achieve the state global exponential synchronization of two identical BAM NNs with reaction-diffusion terms by constructing a suitable Lyapunov functional, using the drive-response approach and some inequality technique. A novel global exponential synchronization criterion is given in terms of inequalities, which can be checked easily. A numerical example is provided to demonstrate the effectiveness of the proposed results.
Similar content being viewed by others

1. Introduction
Aihara et al. [1] firstly proposed chaotic neural network (NN) models to simulate the chaotic behavior of biological neurons. Consequently, chaotic NNs have drawn considerable attention and have successfully been applied in combinational optimization, secure communication, information science, and so on [2–4]. Since NNs related to bidirectional associative memory (BAM) have been proposed by Kosko [5], the BAM NNs have been one of the most interesting research topics and extensively studied because of its potential applications in pattern recognition, etc. Hence, the study of the stability and periodic oscillatory solution of BAM with delays has raised considerable interest in recent years, see for example [6–12] and the references cited therein.
Strictly speaking, diffusion effects cannot be avoided in the NNs when electrons are moving in asymmetric electromagnetic fields. Therefore, we must consider that the activations vary in space as well as in time. In [13–27], the authors have considered various dynamical behaviors such as the stability, periodic oscillation, and synchronization of NNs with diffusion terms, which are expressed by partial differential equations. For instance, the authors of [16] discuss the impulsive control and synchronization for a class of delayed reaction-diffusion NNs with the Dirichlet boundary conditions in terms of p-norm. In [25], the synchronization scheme is discussed for a class of delayed NNs with reaction-diffusion terms. In [26], an adaptive synchronization controller is derived to achieve the exponential synchronization of the drive-response structure of NNs with reaction-diffusion terms. Meanwhile, although the models of delayed feedback with discrete delays are good approximation in simple circuits consisting of a small number of cells, NNs usually have a spatial extent due to the presence of a multitude of parallel pathways with a variety of axon sizes and lengths. Thus, there is a distribution of conduction velocities along these pathways and a distribution of propagation delays. Therefore, the models with discrete and continuously distributed delays are more appropriate.
To the best of the authors' knowledge, global exponential synchronization is seldom reported for the class of delayed BAM NNs with reaction-diffusion terms. In the theory of partial differential equations, Poincaré integral inequality is often utilized in the deduction of diffusion operator [28]. In this article, the problem of global exponential synchronization is investigated for the class of BAM NNs with time-varying and distributed delays and reaction-diffusion terms by using Poincaré integral inequality, Young inequality technique, and Lyapunov method, which are very important in theories and applications and also are a very challenging problem. Several sufficient conditions are in the form of a few algebraic inequalities, which are very convenient to verify.
2. Model description and preliminaries
In this article, a class of delayed BAM NNs with reaction-diffusion terms is described as follows
where x = (x1, x2 ,..,x l ) T ∈ Ω ⊂ ℝ l , Ω is a compact set with smooth boundary ∂Ω and mes Ω > 0 in space ℝ l ; u = (u1,u2,...,u m ) T ∈ ℝ m , (v1,v2,...,v n ) T ∈ ℝ n, u i (t,x) and v j (t,x) and represent the states of the i th neurons and the j th neurons at time t and in space x, respectively. , and are known constants denoting the synaptic connection strengths between the neurons, respectively; f i and g i denote the activation functions of the neurons and the signal propagation functions, respectively; I i and J i denote the external inputs on the i th and j th neurons, respectively; p i and q j are differentiable real functions with positive derivatives defining the neuron charging time, respectively; τ ij (t) and θ ji (t) represent continuous time-varying discrete delays, respectively; D ik ≥ 0 and stand for the transmission diffusion coefficient along the i th and j th neurons, respectively. i = 1, 2, ..., m, k = 1, 2, l and j = 1, 2,..., n.
System (1) is supplemented with the following boundary conditions and initial values
for any i = 1,2,..., m and j = 1,2,..., n where is the outer normal vector of ∂Ω, are bounded and continuous, where It is the Banach space of continuous functions which map into ℝm+n with the topology of uniform converge for the norm
Throughout this article, we assume that the following conditions are made.
(A1) The functions τ ij (t), θ ji (t) are piecewise-continuous of class C1 on the closure of each continuity subinterval and satisfy
with some constants τ ij ≥ 0, θ ji ≥ 0, τ > 0, θ > 0, for all t ≥ 0.
(A2) The functions p i (·)and q j (·) are piecewise-continuous of class C1 on the closure of each continuity subinterval and satisfy
(A3) The activation functions are bounded and Lipschitz continuous, i.e., there exist positive constants and such that for all η1, η2 ∈ ℝ
(A4) The delay kernels (i = 1, 2,...,m, j = 1, 2,...,n) are real-valued non-negative continuous functions that satisfy the following conditions
-
(i)
-
(ii)
(iii)There exist a positive μ such that
We consider system (1) as the drive system. The response system is described by the following equations
where σ i (t,x) and ϑ j (t,x) denote the external control inputs that will be appropriately designed for a certain control objective. We denote , and ϑ(t,x) = (ϑ1(t,x),..., ϑ n (t,x)) T .
The boundary and initial conditions of system (4) are
and
where .
Definition 1. Drive-response systems (1) and (4) are said to be globally exponentially synchronized, if there are control inputs σ(t,x), ϑ(t,x), and r ≥ 2, further there exist constants α > 0 and β ≥ 1 such that
, for all t ≥ 0,
in which , , and (u(t,x), v(t,x)) and are the solutions of drive-response systems (1) and (4) satisfying boundary conditions and initial conditions (2), (3) and (5), (6), respectively.
Lemma 1. [21] (Poincaré integral inequality). Let Ω be a bounded domain of ℝ m with a smooth boundary ∂Ω of class C2 by Ω. u(x) is a real-valued function belonging to and Then
which λ1 is the lowest positive eigenvalue of the Neumann boundary problem
3. Main results
From the definition of synchronization, we can define the synchronization error signal , e(t,x) = (e1(t,x),...,e m (t,x)) T , and ω(t,x) = (ω1(t,x),..., ω n (t,x)) T . Thus, error dynamics between systems (1) and (4) can be expressed by
where , .
The control inputs strategy with state feedback are designed as follows:
that is,
where and are the controller gain matrices.
The global exponential synchronization of systems (1) and (4) can be solved if the controller matrices μ and ρ are suitably designed. We have the following result.
Theorem 1. Under the assumptions (A1)-(A4), drive-response systems (1) and (4) are in global exponential synchronization, if there exist w i > 0(i = 1,2,..., n+m), r ≥ 2, γ ij > 0, β ji > 0 such that the controller gain matrices μ and ρ in (9) satisfy
and
in which i = 1, 2, ..., m, j = 1, 2,..., n, and are Lipschitz constants, λ1 is the lowest positive eigenvalue of problem (7).
Proof. If (10) holds, we can always choose a positive number δ > 0 (may be very small) such that
and
where i = 1, 2,..., m, j = 1, 2,..., n.
Let us consider functions
and
where i = 1, 2, ..., m, j = 1, 2, ..., n.
From (12) and (A4), we derive
F i (0) < -δ < 0, G j (0) < -δ < 0; and are continuous for Moreover, as and as , thus there exist constants ε i ,ν j ∈ [0, +∞) such that
and
By using obviously, we get
and
Multiplying both sides of the first equation of (8) by e i (t,x) and integrating over Ω yields
It is easy to calculate by the Neumann boundary conditions (2) that
Moreover, from Lemma 1, we can derive
From (13)-(17), (A2), and (A3), we obtain that
Multiplying both sides of the second equation of (8) by ω j (t,x), similarly, we also have
Consider the following Lyapunov functional
Its upper Dini-derivative along the solution to system (8) can be calculated as
From (21) and Young inequality, we can conclude
From (10), we can conclude
Since
Noting that
Let
Clearly, β ≥ 1.
It follows that
for any t ≥ 0 where β ≥ 1 is a constant. This implies that drive-response systems (1) and (4) are globally exponentially synchronized. This completes the proof of Theorem 1.
Remark 1. In Theorem 1, the Poincaré integral inequality is used firstly. This is a very important step. Thus, the derived sufficient condition includes diffusion terms. We note that, in the proof in the previous articles [24–26], a negative integral term with gradient is left out in their deduction. This leads to those criteria that are irrelevant to the diffusion term. Therefore, Theorem 1 is essentially new and more effectiveness than those obtained.
Remark 2. It is noted that we construct a novel Lyapunov functional here as defined in (20) since the considered model contains time-varying and distributed delays and reaction-diffusion terms. We can see that the results and research method obtained in this article can also be extended to many other types of NNs with reaction-diffusion terms, e.g., the cellular NNs, cohen-grossberg NNs, etc.
Remark 3. In our result, the effects of the reaction-diffusion terms on the synchronization are considered. Furthermore, we note a very interesting fact, that is, as long as diffusion coefficients in the system are large enough, then condition (10) can always satisfy. This shows that a large enough diffusion coefficient may always make the system globally exponentially synchronous.
Some famous NN models are a special case of model (1). In system (1), ignoring the role of reaction-diffusion, then system (1) will degenerate into the following delayed BAM NNs
and the corresponding response system (4) will become the following form
Define the synchronization error signal , then the error dynamics between systems (27) and (28) can be expressed by
We consider the following control inputs strategy
As a consequence of Theorem 1, we have the following result:
Corollary 1. Under the assumptions (A1)-(A4), drive-response systems (27) and (28) are in global exponential synchronization, if there exist w i > 0 (i = 1, 2,...,n+m), r ≥ 2, γ ij > 0, β ji > 0 such that the controller gain matrices μ and ρ in (9) satisfy
and
in which i = 1, 2,..., m, j = 1, 2,..., n, and are Lipschitz constants.
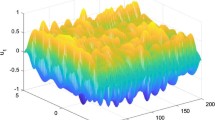
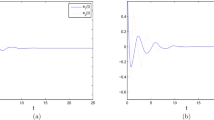
4. Illustration example
To illustrate the effectiveness of our criterion, we give the following example.
Example 1. Consider the following system on
and
where
By simple calculation with w1 = w2 = w3 = w4 = 1, β11 = β12 = β21 = β22 = 1,
and γ11 = γ12 = γ21 = γ22 = 1, we get
and
Hence, it follows from Theorem 1 that (32) and (33) are globally exponentially synchronized.
5. Conclusions
In this article, global exponential synchronization has been considered for a class of BAM NNs with time-varying and distributed delays and reaction-diffusion terms. We have established a new sufficient condition which includes the diffusion coefficients by constructing the suitable Lyapunov functional, introducing many real parameters and applying inequality techniques. From condition (10) in Theorem 1, we see that diffusion coefficients directly affect the synchronization behavior of the delayed BAM NNs with reaction-diffusion terms. In comparison with previous literature, diffusion effects are taken into account in our models. A numerical example has been given to show the effectiveness of the obtained results.
References
Aihara K, Takabe T, Toyoda M: Chaotic neural networks. Phys Lett A 1990, 144: 333–340. 10.1016/0375-9601(90)90136-C
Kwok T, Smith K: Experimental analysis of chaotic neural network models for combinatorial optimization under a unifying framework. Neural Netw 2000, 13: 731–744. 10.1016/S0893-6080(00)00047-2
Yu W, Cao J: Cryptography based on delayed chaotic neural networks. Phys Lett A 2006, 356: 333–338. 10.1016/j.physleta.2006.03.069
Cheng C, Liao T, Yan J, Wang CH: Exponential synchronization of a class of neural networks with time-varying delays. IEEE Trans Syst Man Cybern B 2006, 36: 209–215.
Kosko B: Bi-directional associative memories. IEEE Trans Syst Man Cybern 1988, 18(1):49–60. 10.1109/21.87054
Cao J, Wang L: Exponential stability and periodic oscillatory solution in BAM networks with delays. IEEE Trans Neural Netw 2002, 13(2):457–463. 10.1109/72.991431
Liu X, Martin R, Wu M: Global exponential stability of bidirectional associative memory neural networks with time delays. IEEE Trans Neural Netw 2008, 19(2):397–407.
Lou X, Cui B: Stochastic exponential stability for Markovian jumping BAM neural networks with time-varying delays. IEEE Trans Syst Man Cybern 2007, 37: 713–719.
Park JH: A novel criterion for global asymptotic stability of BAM neural networks with time delays. Chaos Solitons Fractals 2006, 29(2):446–453. 10.1016/j.chaos.2005.08.018
Park JH, Kwon OM: Delay-dependent stability criterion for bidirectional associative memory neural networks with interval time-varying delays. Mod Phys Lett B 2009, 23(1):35–46. 10.1142/S0217984909017807
Park JH, Park CH, Kwon OM, Lee SM: A new stability criterion for bidirectional associative memory neural networks of neutral-type. Appl Math Comput 2008, 199(2):716–722. 10.1016/j.amc.2007.10.032
Park JH, Kwon OM: On improved delay-dependent criterion for global stability of bidirectional associative memory neural networks with time-varying delays. Appl Math Comput 2008, 199(2):435–446. 10.1016/j.amc.2007.10.001
Zhu QX, Cao J: Exponential stability analysis of stochastic reaction-diffusion Cohen-Grossberg neural networks with mixed delays. Neurocomputing 2011, 74: 3084–3091. 10.1016/j.neucom.2011.04.030
Song Q, Cao J: Global exponential stability and existence of periodic solutions in BAM with delays and reaction-diffusion terms. Chaos Solitons Fractals 2005, 23(2):421–430. 10.1016/j.chaos.2004.04.011
Cui B, Lou X: Global asymptotic stability of BAM neural networks with distributed delays and reaction-diffusion terms. Chaos Solitons Fractals 2006, 27(5):1347–1354. 10.1016/j.chaos.2005.04.112
Hu C, Jiang HJ, Teng ZD: Impulsive control and synchronization for delayed neural networks with reaction-diffusion terms. IEEE Trans Neural Netw 2010, 21(1):67–81.
Wang Z, Zhang H: Global asymptotic stability of reaction-diffusion Cohen-Grossberg neural network with continuously distributed delays. IEEE Trans Neural Netw 2010, 21(1):39–49.
Wang L, Zhang R, Wang Y: Global exponential stability of reaction-diffusion cellular neural networks with S-type distributed time delays. Nonlinear Anal Real World Appl 2009, 10(2):1101–1113. 10.1016/j.nonrwa.2007.12.002
Balasubramaniam P, Vidhya C: Global asymptotic stability of stochastic BAM neural networks with distributed delays and reaction-diffusion terms. J Comput Appl Math 2010, 234: 3458–3466. 10.1016/j.cam.2010.05.007
Lu J, Lu L: Global exponential stability and periodicity of reaction-diffusion recurrent neural networks with distributed delays and Dirichlet boundary conditions. Chaos Solitons Fractals 2009, 39(4):1538–1549. 10.1016/j.chaos.2007.06.040
Song Q, Zhao Z, Li YM: Global exponential stability of BAM neural networks with distributed delays and reaction-diffusion terms. Phys Lett A 2005, 335(2–3):213–225. 10.1016/j.physleta.2004.12.007
Zhang W, Li J: Global exponential stability of reaction-diffusion neural networks with discrete and distributed time-varying delays. Chin Phys B 2011, 20(3):030701. 10.1088/1674-1056/20/3/030701
Liao XX, Yang SZ, Cheng SJ, Fu YL: Stability of generalized networks with reaction-diffusion terms. Sci China (Series F) 2001, 44: 87–94. 10.1007/BF02884813
Lou X, Cui B: Asymptotic synchronization of a class of neural networks with reaction-diffusion terms and time-varying delays. Comput Math Appl 2006, 52: 897–904. 10.1016/j.camwa.2006.05.013
Wang Y, Cao J: Synchronization of a class of delayed neural networks with reaction-diffusion terms. Phys. Lett A 2007, 369: 201–211. 10.1016/j.physleta.2007.04.079
Sheng L, Yang H, Lou X: Adaptive exponential synchronization of delayed neural networks with reaction-diffusion terms. Chaos Solitons Fractals 2009, 40: 930–939. 10.1016/j.chaos.2007.08.047
Wang K, Teng Z, Jiang H: Global exponential synchronization in delayed reaction-diffusion cellular neural networks with the Dirichlet boundary conditions. Math Comput Model 2010, 52: 12–24. 10.1016/j.mcm.2009.05.038
Temam R: Infinite Dimensional Dynamical Systems in Mechanics and Physics. Springer-Verlag, New York; 1998.
Acknowledgements
This study was partially supported by the National Natural Science Foundation of China under Grant No. 60974139 and partially supported by the Fundamental Research Funds for the Central Universities under Grant No. 72103676, the Natural Science Foundation of Shannxi Province, China under Grant No. 2010JQ1013, and the Special research projects in Shannxi Province Department of Education under Grant No. 2010JK896.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors' contributions
WZ designed and performed all the steps of proof in this research and also wrote the paper. JL participated in the design of the study and suggest many good ideas that made this paper possible and helped to draft the first manuscript. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Zhang, W., Li, J. Global exponential synchronization of delayed BAM neural networks with reaction-diffusion terms and the Neumann boundary conditions. Bound Value Probl 2012, 2 (2012). https://doi.org/10.1186/1687-2770-2012-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-2770-2012-2