
Abstract
In this paper, we study the boundedness character and persistence, existence and uniqueness of the positive equilibrium, local and global behavior, and rate of convergence of positive solutions of two systems of exponential difference equations. Furthermore, by constructing a discrete Lyapunov function, we obtain the global asymptotic stability of the unique positive equilibrium point. Some numerical examples are given to verify our theoretical results.
MSC:39A10, 40A05.
Similar content being viewed by others

1 Introduction and preliminaries
Since difference equations and systems of difference equations containing exponential terms have many potential applications in biology, there are many papers dealing with such equations. See, for example the following.
El-Metwally et al. [1] have investigated the boundedness character, asymptotic behavior, periodicity nature of the positive solutions, and stability of the equilibrium point of the following population model:
where the parameters α, β are positive numbers and the initial conditions are arbitrary non-negative real numbers.
Ozturk et al. [2] have investigated the boundedness, asymptotic behavior, periodicity, and stability of the positive solutions of the following difference equation:
where the parameters α, β, γ are positive numbers and the initial conditions are arbitrary non-negative numbers.
Bozkurt [3] has investigated the local and global behavior of positive solutions of the following difference equation:
where the parameters α, β, γ, and the initial conditions are arbitrary positive numbers.
Papaschinopoulos et al. [4] have investigated the boundedness, persistence, and asymptotic behavior of positive solutions of the following two directional interactive and invasive species models:
where the parameters a, b, c, d and the initial conditions are arbitrary positive numbers.
Papaschinopoulos et al. [5] have investigated the asymptotic behavior of the solutions of the following three systems of difference equations of exponential form:
where the parameters α, β, γ, δ, ϵ, δ are positive numbers and the initial conditions are arbitrary non-negative numbers.
Papaschinopoulos and Schinas [6] have investigated the asymptotic behavior of the positive solutions of the systems of the two difference equations:
where the parameters a, b, c, d, and the initial conditions are arbitrary positive numbers.
Recently, Khan and Qureshi [7] have investigated the qualitative behavior of the following exponential type system of rational difference equations:
where α, β, γ, , , , and the initial conditions , , , are positive real numbers.
Motivated by the above studies, our aim in this paper is to investigate the qualitative behavior of positive solutions of the following two systems of exponential rational difference equations:
and
where the parameters α, β, γ, , , , and the initial conditions are positive real numbers.
More precisely, we investigate the boundedness character, persistence, existence and uniqueness of positive steady state, local asymptotic stability and global behavior of the unique positive equilibrium point, and rate of convergence of positive solutions of systems (1) and (2) which converge to its unique positive equilibrium point. For basic theory and applications of difference equations we refer the reader [8–16] and references therein.
Let us consider the four-dimensional discrete dynamical system of the form
where and are continuously differentiable functions and I, J are some intervals of real numbers. Furthermore, a solution of system (3) is uniquely determined by the initial conditions for . Along with system (3) we consider the corresponding vector map . An equilibrium point of (3) is a point that satisfies
The point is also called a fixed point of the vector map F.
Definition 1 Let be an equilibrium point of system (3).
-
(i)
An equilibrium point is said to be stable if, for every , there exists such that for every initial condition , , implies for all , where is the usual Euclidean norm in .
-
(ii)
An equilibrium point is said to be unstable if it is not stable.
-
(iii)
An equilibrium point is said to be asymptotically stable if there exists such that and as .
-
(iv)
An equilibrium point is called a global attractor if as .
-
(v)
An equilibrium point is called an asymptotic global attractor if it is a global attractor and stable.
Definition 2 Let be an equilibrium point of the map
where f and g are continuously differentiable functions at . The linearized system of (3) about the equilibrium point is
where
and is the Jacobian matrix of system (3) about the equilibrium point .
Lemma 1 [17]
Consider the system , , where is a fixed point of F. If all eigenvalues of the Jacobian matrix about lie inside the open unit disk , then is locally asymptotically stable. If any of the eigenvalue has a modulus greater than one, then is unstable.
The following result gives the rate of convergence of solutions of a system of difference equations:
where is an m-dimensional vector, is a constant matrix, and is a matrix function satisfying
as , where denotes any matrix norm which is associated with the vector norm
Proposition 1 (Perron’s theorem) [18]
Suppose that condition (5) holds. If is a solution of (4), then either for all large n or
or
exists and is equal to the modulus of one of the eigenvalues of matrix A.
2 On the system ,
In this section, we shall investigate the asymptotic behavior of system (1). Let be the equilibrium point of system (1) then
To construct the corresponding linearized form of system (1), we consider the following transformation:
where
The Jacobian matrix about the fixed point under the transformation (6) is given by
2.1 Boundedness and persistence
The following theorem shows that every positive solution of system (1) is bounded and persists.
Theorem 1 Every positive solution of system (1) is bounded and persists.
Proof Let be an arbitrary solution of (1). From (1), we have
In addition from (1) and (7), we have
Hence, from (7) and (8), we get
So the proof is complete. □
2.2 Existence of invariant set for solutions
Theorem 2 Let be a positive solution of system (1). Then is an invariant set for system (1).
Proof For any positive solution of system (1) with initial conditions , and , we have
and
Moreover,
and
Hence, and . Similarly, one can show that if and , then and . □
2.3 Existence and uniqueness of the positive equilibrium and local stability
Theorem 3 Suppose that
where
Then system (1) has a unique positive equilibrium point in .
Proof Consider the following system of equations:
Let , where and . Then it follows that . Now, if and only if
Furthermore, we have where . It is easy to see that if and only if
Hence, has at least one positive solution in . Furthermore, assume that condition (9) is satisfied, then one has
Hence, has a unique positive solution in . This completes the proof. □
Theorem 4 Assume that
Then the unique positive equilibrium point in of system (1) is locally asymptotically stable.
Proof The characteristic polynomial of the Jacobian matrix about the equilibrium point is given by
Let and
Assume that . Then one has
Then, by Rouche’s theorem, and have the same number of zeroes in an open unit disk . Hence, the unique positive equilibrium point in of system (1) is locally asymptotically stable. □
2.4 Global character
Theorem 5 If
then the unique positive equilibrium point of system (1) is globally asymptotically stable.
Proof Arranging as in [19], we consider the following discrete time analog of the Lyapunov function:
The nonnegativity of follows from the following inequality:
Furthermore, we have
Assume that (10) holds true, then it follows that
for all . Thus is a non-increasing non-negative sequence. It follows that . Hence, we obtain . Then it follows that and . Furthermore, for all , which shows that is uniformly stable. Hence, the unique positive equilibrium point of system (1) is globally asymptotically stable. □
2.5 Rate of convergence
In this section, we will determine the rate of convergence of a solution that converges to the unique positive equilibrium point of system (1).
Let be any solution of system (1) such that , and . To find the error terms, note that
So,
Similarly,
From (11) and (12), we have
Let and . Then system (13) can be represented as
where
Moreover,
So, the limiting system of the error terms can be written as
which is similar to the linearized system of (1) about the equilibrium point . Using Proposition 1, one has the following result.
Theorem 6 Assume that be a positive solution of system (1) such that , and , where in and in . Then the error vector
of every solution of (1) satisfies both of the following asymptotic relations:
where are the characteristic roots of Jacobian matrix .
3 On the system ,
In this section, we shall investigate the asymptotic behavior of system (2). Let be the equilibrium point of system (2), then
To construct the corresponding linearized form of system (2), we consider the following transformation:
where
The Jacobian matrix about the fixed point under transformation (14) is given by
where , , , , , , , .
3.1 Boundedness and persistence
Theorem 7 Every positive solution of system (2) is bounded and persists.
Proof Let be an arbitrary solution of (2), then
From (2) and (15), we have
Hence, from (15) and (16), we get
This proves the statement. □
Theorem 8 Let be a positive solution of system (2). Then is an invariant set for system (2).
Proof Follows by induction. □
3.2 Existence and uniqueness and local stability
The following theorem shows the existence and uniqueness of the positive equilibrium point of system (2).
Theorem 9 If
then system (2) has a unique positive equilibrium point in .
Proof Consider the following system of algebraic equations:
Assume that , then it follows from (18) that
Defining
where , . It is easy to see that if and only if . Also, if and only if . Hence, has at least one positive solution in . Furthermore, assume that condition (17) is satisfied, then one has
Hence, has a unique positive solution in . This completes the proof. □
Theorem 10 If
then the unique positive equilibrium point of system (2) is locally asymptotically stable.
Proof The characteristic equation of the Jacobian matrix about the equilibrium point is given by
where , , , . Assuming condition (19) one has
Therefore, inequality (20) and Remark 1.3.1 of reference [20] implies that the unique positive equilibrium point of system (2) is locally asymptotically stable. This completes the proof. □
3.3 Global character
Theorem 11 If
then the unique positive equilibrium point of system (2) is globally asymptotically stable.
Proof Using arrangements for the proof of Theorem 5 and assume that (21) holds true, then
for all so that is a non-increasing sequence. It follows that . Hence, we obtain . It follows that and . Furthermore, for all , which implies that is uniform stable. Hence, the unique positive equilibrium point of system (2) is globally asymptotically stable. □
3.4 Rate of convergence
In this section we will determine the rate of convergence of a solution that converges to the unique positive equilibrium point of system (2).
Let be any solution of system (2) such that , and . To find the error terms,
So,
Similarly,
From (22) and (23), we have
Let , and . Then system (24) can be represented as
where
Moreover,
So, the limiting system of the error terms can be written as
which is similar to linearized system of (2) about the equilibrium point . Using Proposition 1, one has the following result.
Theorem 12 Assume that is a positive solution of system (2) such that , and , where in and in . Then the error vector
of every solution of (2) satisfies both of the following asymptotic relations:
where are the roots of the characteristic polynomial of .
4 Examples
In order to verify our theoretical results and to support our theoretical discussions, we consider several interesting numerical examples. These examples represent different types of qualitative behavior of solutions of the systems of nonlinear difference equations (1) and (2). All plots in this section are drawn with Mathematica.
Example 1 Let , , , , , . Then system (1) can be written as
with initial conditions , , , .
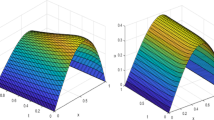
In this case the unique positive equilibrium point of system (25) is given by . Moreover, in Figure 1 the plot of is shown in Figure 1(a), the plot of is shown in Figure 1(b), and an attractor of system (25) is shown in Figure 1(c).

Plots for system ( 25 ).
Example 2 Let , , , , , . Then system (1) can be written as
with initial conditions , , , . The plot of system (26) is shown in Figure 2.

Plot of system ( 26 ).
Example 3 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (27) is given by . Moreover, in Figure 3 the plot of is shown in Figure 3(a), the plot of is shown in Figure 3(b), and an attractor of system (27) is shown in Figure 3(c).

Plots for system ( 27 ).
Example 4 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (28) is given by . Moreover, in Figure 4 the plot of is shown in Figure 4(a), the plot of is shown in Figure 4(b), and an attractor of system (28) is shown in Figure 4(c).

Plots for system ( 28 ).
Example 5 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (29) is given by . Moreover, in Figure 5 the plot of is shown in Figure 5(a), the plot of is shown in Figure 5(b), and an attractor of system (29) is shown in Figure 5(c).

Plots for system ( 29 ).
Example 6 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (30) is unstable. Moreover, in Figure 6 the plot of is shown in Figure 6(a), the plot of is shown in Figure 6(b), and a phase portrait of system (30) is shown in Figure 6(c).

Plots for system ( 30 ).
Example 7 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (31) is unstable. Moreover, in Figure 7 the plot of is shown in Figure 7(a), the plot of is shown in Figure 7(b), and a phase portrait of system (31) is shown in Figure 7(c).

Plots for system ( 31 ).
Example 8 Let , , , , , . Then system (2) can be written as
with initial conditions , , , .
In this case the unique positive equilibrium point of system (32) is unstable. Moreover, in Figure 8 the plot of is shown in Figure 8(a), the plot of is shown in Figure 8(b), and a phase portrait of system (32) is shown in Figure 8(c).

Plots for system ( 32 ).
5 Conclusion
This work is related to the qualitative behavior of some systems of exponential rational difference equations. We have investigated the existence and uniqueness of the positive steady state of system (1) and (2). For all positive values of the parameters the boundedness and persistence of positive solutions are proved. Moreover, we have shown that the unique positive equilibrium point of system (1) and (2) is locally as well as globally asymptotically stable under certain parametric conditions. The main objective of dynamical systems theory is to predict the global behavior of a system based on the knowledge of its present state. An approach to this problem consists of determining the possible global behaviors of the system and determining which parametric conditions lead to these long-term behaviors. By constructing a discrete Lyapunov function, we have obtained the global asymptotic stability of the positive equilibrium of (1) and (2). Finally, some illustrative examples are provided to support our theoretical discussion. First two examples show that the unique positive equilibrium point of system (1) is stable with different parametric values. Meanwhile Examples 3, 4, and 5 show that the unique positive equilibrium point of system (2) is stable whereas the last three examples show that the unique positive equilibrium point of system (2) is unstable with suitable parametric choices.
References
El-Metwally E, Grove EA, Ladas G, Levins R, Radin M:On the difference equation. Nonlinear Anal. 2001, 47: 4623-4634. 10.1016/S0362-546X(01)00575-2
Ozturk I, Bozkurt F, Ozen S:On the difference equation.Appl. Math. Comput. 2006, 181: 1387-1393. 10.1016/j.amc.2006.03.007
Bozkurt F: Stability analysis of a nonlinear difference equation. Int. J. Mod. Nonlinear Theory Appl. 2013, 2: 1-6. 10.4236/ijmnta.2013.21001
Papaschinopoulos G, Radin MA, Schinas CJ:On the system of two difference equations of exponential form:, . Math. Comput. Model. 2011, 54: 2969-2977. 10.1016/j.mcm.2011.07.019
Papaschinopoulos G, Radin MA, Schinas CJ: Study of the asymptotic behavior of the solutions of three systems of difference equations of exponential form. Appl. Math. Comput. 2012, 218: 5310-5318. 10.1016/j.amc.2011.11.014
Papaschinopoulos G, Schinas CJ: On the dynamics of two exponential type systems of difference equations. Comput. Math. Appl. 2012, 64(7):2326-2334. 10.1016/j.camwa.2012.04.002
Khan AQ, Qureshi MN: Behavior of an exponential system of difference equations. Discrete Dyn. Nat. Soc. 2014., 2014: Article ID 607281 10.1155/2014/607281
Din Q, Qureshi MN, Khan AQ: Dynamics of a fourth-order system of rational difference equations. Adv. Differ. Equ. 2012., 2012: Article ID 215
Kulenović MRS, Ladas G: Dynamics of Second Order Rational Difference Equations. Chapman & Hall/CRC, London; 2002.
Elsayed EM: Solutions of rational difference system of order two. Math. Comput. Model. 2012, 55: 378-384. 10.1016/j.mcm.2011.08.012
Elsayed EM: Behavior and expression of the solutions of some rational difference equations. J. Comput. Anal. Appl. 2013, 15(1):73-81.
Elsayed EM, El-Metwally H: Stability and solutions for rational recursive sequence of order three. J. Comput. Anal. Appl. 2014, 17(2):305-315.
Elsayed EM, El-Metwally HA: On the solutions of some nonlinear systems of difference equations. Adv. Differ. Equ. 2013., 2013: Article ID 16
Din Q, Khan AQ, Qureshi MN: Qualitative behavior of a host-pathogen model. Adv. Differ. Equ. 2013., 2013: Article ID 263
Khan AQ, Qureshi MN, Din Q: Global dynamics of some systems of higher-order rational difference equations. Adv. Differ. Equ. 2013., 2013: Article ID 354
Qureshi MN, Khan AQ, Din Q: Asymptotic behavior of a Nicholson-Bailey model. Adv. Differ. Equ. 2014., 2014: Article ID 62
Sedaghat H: Nonlinear Difference Equations: Theory with Applications to Social Science Models. Kluwer Academic, Dordrecht; 2003.
Pituk M: More on Poincaré’s and Perron’s theorems for difference equations. J. Differ. Equ. Appl. 2002, 8: 201-216. 10.1080/10236190211954
Enatsu Y, Nakata Y, Muroya Y: Global stability for a class of discrete SIR epidemic models. Math. Biosci. Eng. 2010, 7(2):347-361.
Kocic VL, Ladas G: Global Behavior of Nonlinear Difference Equations of Higher Order with Applications. Kluwer Academic, Dordrecht; 1993.
Acknowledgements
The author thanks the main editor and anonymous referees for their valuable comments and suggestions leading to improvement of this paper. This work was supported by the Higher Education Commission of Pakistan.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Author’s contributions
The author carried out the proof of the main results and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Khan, A.Q. Global dynamics of two systems of exponential difference equations by Lyapunov function. Adv Differ Equ 2014, 297 (2014). https://doi.org/10.1186/1687-1847-2014-297
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-297