
Abstract
We introduce an iterative process which converges strongly to a common fixed point of a family of Lipschitzian pseudocontractive mappings. Our theorems improve and unify most of the results that have been proved for this important class of nonlinear operators.
MSC:47H09, 47J20, 65J15.
Similar content being viewed by others


1 Introduction
Let C be a nonempty subset of a real Hilbert space H. A mapping is called pseudocontractive if and only if
and T is called α-strictly pseudocontractive [1] if and only if there exists such that
T is called Lipschitzian if and only if
If in (1.3) we have , then T is called nonexpansive. We note that inequalities (1.1) and (1.2) can be equivalently written as
and
for some , respectively.
We observe from (1.1), (1.2) and (1.3) that every nonexpansive mapping is an α-strictly pseudocontractive mapping and every α-strictly pseudocontractive mapping is a pseudocontractive mapping, and hence a class of pseudocontractive mappings is a more general class of mappings.
Furthermore, pseudocontractive mappings are related with the important class of nonlinear monotone mappings, where a mapping A with domain and range in H is called monotone if the inequality
holds for every . We note that T is pseudocontractive if and only if is monotone, and hence a fixed point of T, , is a zero of A, . It is now well known (see, e.g., [2]) that if A is monotone, then the solutions of the equation correspond to the equilibrium points of some evolution systems.
Finding a point in the intersection of fixed point sets of a family of nonexpansive mappings is a task that occurs frequently in various areas of mathematical sciences and engineering. For example, the well-known convex feasibility problem reduces to finding a point in the intersection of fixed point sets of a family of nonexpansive mappings; see, e.g., [3, 4].
Consequently, considerable research efforts have been devoted to developing iterative methods for approximating a common fixed point (when it exists) for a family of nonexpansive mappings and α-strictly pseudocontractive mappings. Bauschke [5] was the first to introduce a Halpern-type iterative process (see, e.g., [6]) for approximating a common fixed point for a finite family of N nonexpansive self-mappings. He proved the following theorem.
Theorem BSK (Bauschke [5], Theorem 3.1)
Let K be a nonempty closed convex subset of a Hilbert space H, and let be a finite family of nonexpansive mappings of K into itself with and . Given points , let be generated by
where and satisfies . Then converges strongly to , where is the metric projection.
Various authors have studied iterative schemes similar to that of Theorem BSK in more general Banach spaces on the one hand, and using various conditions on the sequence on the other hand (see, for example, Colao et al. [7], Yao [8], Takahashi and Takahashi [9], Plubtieng and Punpaeng [10], Ceng et al. [11] and the references therein). Many authors have also studied iterative methods for a family of α-strictly pseudocontractive mappings (see, e.g., [12–15] and the references therein).
Our concern now is the following: Can we construct an iterative sequence for a common fixed point of a finite family of pseudocontractive mappings?
In 2008, Zhou [16] studied weak convergence of an implicit scheme to a common fixed point of a finite family of pseudocontractive mappings in Banach spaces more general than Hilbert spaces. Let C be a closed convex subset of E, and let be a finite family of Lipschitzian pseudocontractive self-mappings of C subset of E which is a real uniformly convex Banach space with a Frêchet differentiable norm and . Let be defined by
where . He proved that converges weakly to a common fixed point of the family under certain conditions on the parameter .
We remark that the scheme in the theorem of Zhou [16] is implicit and the convergence is weak convergence.
Recently, Zegeye et al. [17] proved the following strong convergence of Ishikawa iterative process [18] for a common fixed point of a finite family of Lipschitz pseudocontractive mappings.
Theorem ZSA [17]
Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let , , be a finite family of Lipschitz pseudocontractive mappings with Lipschitzian constants , for , respectively. Assume that the interior of is nonempty. Let be a sequence generated from an arbitrary by
where and satisfy certain appropriate conditions. Then converges strongly to a common fixed point of .
It is worth to mention that the assumption ‘interior of is nonempty’ in Theorem ZSA is severe restriction.
More recently, Daman and Zegeye [19] proved the following strong convergence of a Halpern-type [6] iterative process for a common fixed point of a finite family of Lipschitz pseudocontractive mappings under the assumption that the family satisfies condition (H), that is, the family of pseudocontractive mappings is said to satisfy condition (H) if and only if for . We can also see that condition (H) is again severe restriction.
It is our purpose in this paper to introduce an iterative scheme which converges strongly to a common fixed point of a family of Lipschitz pseudocontractive mappings. The assumption that interior of is nonempty or condition (H) is dispensed with. The results obtained in this paper improve and extend the results of Zhou [20], Theorem ZSA, Daman and Zegeye [19] and some other results in this direction.
2 Preliminaries
In what follows we shall make use of the following lemmas.
Lemma 2.1 Let H be a real Hilbert space. Then, for any given , the following inequality holds:
Lemma 2.2 [21]
Let C be a convex subset of a real Hilbert space H. Let . Then if and only if
Lemma 2.3 [22]
Let be a sequence of nonnegative real numbers satisfying the following relation:
where and satisfy the following conditions: , , and . Then .
Lemma 2.4 [23]
Let H be a real Hilbert space, C be a closed convex subset of H and be a continuous pseudocontractive mapping. Then
-
(i)
is a closed convex subset of C;
-
(ii)
is demiclosed at zero, i.e., if is a sequence in C such that and , as , then .
Lemma 2.5 [24]
Let be sequences of real numbers such that there exists a subsequence of such that for all . Then there exists a nondecreasing sequence such that and the following properties are satisfied by all (sufficiently large) numbers :
In fact, is the largest number n in the set such that the condition holds.
Lemma 2.6 [25]
Let H be a real Hilbert space. Then, for all and for such that , the following equality holds:
3 Main result
Theorem 3.1 Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let be Lipschitz pseudocontractive mappings with Lipschitz constants and , respectively. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) ; (ii) , ; (iii) , , , for . Then converges strongly to a common fixed point of and nearest to u.
Proof We make use of some ideas of the paper [19]. Let . Then, from (3.1), (1.1) and Lemma 2.6, we have that
and hence
In addition, from (3.1), Lemma 2.6 and (1.1), we get that
Similarly, we have that
Furthermore, from (3.1) and Lemma 2.6, we have that
Similarly, we obtain that
Substituting (3.3), (3.4), (3.5) and (3.6) into (3.2), we obtain that
and hence
Now, from (iii) of the hypothesis, we have that
and
Thus, inequality (3.7) implies that
Thus, by induction,
which implies that and hence are bounded.
Let . Then, using (3.1), Lemma 2.1 and following the methods used to get (3.7), we obtain that
and
which implies that
Now, we consider two cases.
Case 1. Suppose that there exists such that is decreasing for all . Then, we get that is convergent. Thus, from (3.12), (3.8), (3.9) and (3.10), we have that
Furthermore, since is a bounded subset of H which is reflexive, we can choose a subsequence of such that and . Then, from (3.14) and Lemma 2.4, we have that and . Therefore, by Lemma 2.2, we immediately obtain that
Then it follows from (3.13), (3.15) and Lemma 2.3 that as . Consequently, .
Case 2. Suppose that there exists a subsequence of such that
for all . Then, by Lemma 2.5, there exists a nondecreasing sequence such that , and
for all . Now, from (3.12), (3.8), (3.9) and (3.10), we get that and as . Thus, like in Case 1, we obtain that
Now, from (3.13) we have that
and hence (3.16) and (3.18) imply that
But using the fact that and (3.17), we obtain that
and hence as . This together with (3.18) implies that as . But for all , thus we obtain that . Therefore, from the above two cases, we can conclude that converges strongly to a common fixed point of and nearest to u. The proof is complete. □
We note that the method of the proof of Theorem 3.1 provides a convergence theorem for a finite family of Lipschitzian pseudocontractive mappings. In fact, we have the following theorem.
Theorem 3.2 Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let , , be Lipschitz pseudocontractive mappings with Lipschitz constants , , respectively. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) ; (ii) , ; (iii) , , for . Then converges strongly to a common fixed point of () nearest to u.
If in Theorem 3.1 we assume that T is nonexpansive, then we have that T is Lipschitz pseudocontractive with , and hence we get the following corollary.
Corollary 3.3 Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let be nonexpansive mappings. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) ; (ii) , ; (iii) , . Then converges strongly to a common fixed point of and nearest to u.
We now state and prove the convergence theorem for a common zero of a family of monotone mappings.
Corollary 3.4 Let H be a real Hilbert space. Let , , be Lipschitz monotone mappings with Lipschitz constants and , respectively. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) ; (ii) , ; (iii) , , for . Then converges strongly to a common zero point of and nearest to u.
Proof Let for . Then we get that every for all is a Lipschitz pseudocontractive mapping with the Lipschitz constant and . Moreover, when is replaced with , for each , then scheme (3.21) reduces to scheme (3.1), and hence the conclusion follows from Theorem 3.1. □
We may also have the following corollary for a finite family of monotone mappings.
Corollary 3.5 Let H be a real Hilbert space. Let , , be Lipschitz monotone mappings with Lipschitz constants , , respectively. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) ; (ii) , ; (iii) , , for . Then converges strongly to a common zero point of , , nearest to u.
If in Corollary 3.5 we consider a single Lipschitz monotone mapping, then we obtain the following corollary.
Corollary 3.6 Let H be a real Hilbert space. Let be a Lipschitz monotone mapping with Lipschitz constant L. Assume that is nonempty. Let a sequence be generated from an arbitrary by
where , satisfy the following conditions: (i) , ; (ii) , . Then converges strongly to the zero point of A nearest to u.
4 Numerical example
Now, we give an example of a finite family of pseudocontractive mappings satisfying Theorem 3.1 and some numerical experiment result to explain the conclusion of the theorem as follows.
Example 4.1 Let with absolute value norm. Let and be defined by
and
Clearly, , and for we have that
and
which show that both mappings are pseudocontractive. Next, we show that is Lipschitzian with . If , then
If , then
If and , then
If and , then
Thus, we get that is Lipschitzian pseudocontractive with . Similarly, we can show that is Lipschitzian pseudocontractive with .
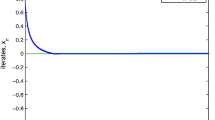
Now, taking , , and , we observe that the conditions of Theorem 3.1 are satisfied and scheme (3.1) provides the data in Tables 1 and 2 and Figures 1 and 2.

Figure of with initial values and .

Figure of with initial values and .
-
(i)
When and , we see that the sequence converges to as shown in Table 1 and Figure 1.
-
(ii)
When and , we see that the sequence converges to as shown in Table 2 and Figure 2.
Remark 4.2 Theorem 3.1 provides a convergence sequence to a common fixed point of two Lipschitzian pseudocontractive mappings, whereas Theorem 3.2 provides a convergence sequence to a common fixed point of a finite family of Lipschitzian pseudocontractive mappings. In addition, Corollary 3.4 provides a convergence sequence to a common zero of two Lipschitzian monotone mappings, whereas Theorem 3.5 provides a convergence sequence to a common zero of a finite family of Lipschitzian monotone mappings.
Remark 4.3 Theorem 3.2 improves Theorem ZSA, Theorem 3.2 of Daman and Zegeye [19] in the sense that our convergence does not require the assumption that interior of is nonempty or condition (H).
Remark 4.4 Theorem 3.1 improves Theorem 3.1 of Zhou [20], Theorem 3.1 of Yao et al. [26] and Theorem 3.1 of Tang et al. [27] in the sense that our convergence requires neither compactness of T nor computation of closed and convex of C for each .
References
Browder FE, Petryshyn WV: Construction of fixed points of nonlinear mappings in Hilbert space. J. Math. Anal. Appl. 1967, 20: 197–228. 10.1016/0022-247X(67)90085-6
Zeidler E: Nonlinear Functional Analysis and Its Applications, Part II: Monotone Operators. Springer, Berlin; 1985.
Bauschke HH, Borwein JM: On projection algorithms for solving convex feasibility problems. SIAM Rev. 1996, 38: 367–426. 10.1137/S0036144593251710
Combettes PL: The foundations of set theoretic estimation. Proc. IEEE 1993, 81: 182–208.
Bauschke HH: The approximation of fixed points of compositions of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl. 1996, 202: 150–159. 10.1006/jmaa.1996.0308
Halpern B: Fixed points of nonexpansive maps. Bull. Am. Math. Soc. 1967, 73: 957–961. 10.1090/S0002-9904-1967-11864-0
Colao V, Marino G, Xu HK: An iterative method for finding common solutions of equilibrium and fixed point problems. J. Math. Anal. Appl. 2008, 344: 340–352. 10.1016/j.jmaa.2008.02.041
Yao Y: A general iterative method for a finite family of nonexpansive mappings. Nonlinear Anal. 2007, 66: 2676–2687. 10.1016/j.na.2006.03.047
Takahashi S, Takahashi W: Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 331: 506–515. 10.1016/j.jmaa.2006.08.036
Plubtieng S, Punpaeng R: A general iterative method for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 336: 455–469. 10.1016/j.jmaa.2007.02.044
Ceng LC, Cubiotti P, Yao JC: Strong convergence theorems for finitely many nonexpansive mappings and applications. Nonlinear Anal. 2007, 67: 1464–1473. 10.1016/j.na.2006.06.055
Osilike MO, Shehu Y: Cyclic algorithm for common fixed points of finite family of strictly pseudocontractive mappings of Browder-Petryshyn type. Nonlinear Anal. 2009, 70: 3575–3583. 10.1016/j.na.2008.07.015
Zegeye H, Shahzad N: Strong convergence theorems for a common zero of a countably infinite family of λ -inverse strongly accretive mappings. Nonlinear Anal. 2009, 71: 531–538. 10.1016/j.na.2008.10.091
Zegeye H, Shahzad N: Strong convergence theorems for a common zero of a finite family of m -accretive mappings. Nonlinear Anal. 2007, 66: 1161–1169. 10.1016/j.na.2006.01.012
Zhang Y, Guo Y: Weak convergence theorems of three iterative methods for strictly pseudocontractive mappings of Browder-Petryshyn type. Fixed Point Theory Appl. 2008., 2008: Article ID 672301
Zhou H: Convergence theorems of fixed points for a finite family of Lipschitz pseudo-contractions in Banach spaces. Nonlinear Anal. 2008, 68: 2977–2983. 10.1016/j.na.2007.02.041
Zegeye H, Shahzadb N, Alghamdi MA: Convergence of Ishikawa’s iteration method for pseudocontractive mappings. Nonlinear Anal. 2011, 74: 7304–7311. 10.1016/j.na.2011.07.048
Ishikawa S: Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44: 147–150. 10.1090/S0002-9939-1974-0336469-5
Daman OA, Zegeye H: Strong convergence theorems for a common fixed point of a finite family of pseudocontractive mappings. Int. J. Math. Math. Sci. 2012., 2012: Article ID 405315 10.1155/2012/405315
Zhou H: Convergence theorems of fixed points for Lipschitz pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2008, 343: 546–556. 10.1016/j.jmaa.2008.01.045
Alber Y: Metric and generalized projection operators in Banach spaces: properties and applications. Lecture Notes in Pure and Appl. Math. 178. In Theory and Applications of Nonlinear Operators of Accretive and Monotone Type. Edited by: Kartsatos AG. Dekker, New York; 1996:15–50.
Xu HK: Another control condition in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 2002, 65: 109–113. 10.1017/S0004972700020116
Zhang QB, Cheng CZ: Strong convergence theorem for a family of Lipschitz pseudocontractive mappings in a Hilbert space. Math. Comput. Model. 2008, 48: 480–485. 10.1016/j.mcm.2007.09.014
Maingé PE: Strong convergence of projected subgradient methods for nonsmooth and non-strictly convex minimization. Set-Valued Anal. 2008, 16: 899–912. 10.1007/s11228-008-0102-z
Zegeye H, Shahzad N: Convergence of Mann’s type iteration method for generalized asymptotically nonexpansive mappings. Comput. Math. Appl. 2011, 62: 4007–4014. 10.1016/j.camwa.2011.09.018
Yao YH, Liou YC, Marino G: A hybrid algorithm for pseudo-contractive mappings. Nonlinear Anal. 2009, 71: 4997–5002. 10.1016/j.na.2009.03.075
Tang Y-C, Peng J-G, Liu L-W: Strong convergence theorem for pseudocontractive mappings in Hilbert spaces. Nonlinear Anal. 2011, 74: 380–385. 10.1016/j.na.2010.08.048
Acknowledgements
This article was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah. The second author acknowledges with thanks DSR for financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All the authors contributed equally. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Zegeye, H., Shahzad, N. An algorithm for a common fixed point of a family of pseudocontractive mappings. Fixed Point Theory Appl 2013, 234 (2013). https://doi.org/10.1186/1687-1812-2013-234
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1812-2013-234