
Abstract
An iterative algorithm is introduced for the construction of the minimum-norm fixed point of a pseudocontraction on a Hilbert space. The algorithm is proved to be strongly convergent.
MSC:47H05, 47H10, 47H17.
Similar content being viewed by others

1 Introduction
Construction of fixed points of nonlinear mappings is a classical and active area of nonlinear functional analysis due to the fact that many nonlinear problems can be reformulated as fixed point equations of nonlinear mappings. The research of this area dates back to Picard’s and Banach’s time. As a matter of fact, the well-known Banach contraction principle states that the Picard iterates converge to the unique fixed point of T whenever T is a contraction of a complete metric space. However, if T is not a contraction (nonexpansive, say), then the Picard iterates fail, in general, to converge; hence, other iterative methods are needed. In 1953, Mann [1] introduced the now called Mann’s iterative method which generates a sequence via the averaged algorithm
where is a sequence in the unit interval , T is a self-mapping of a closed convex subset C of a Hilbert space H, and the initial guess is an arbitrary (but fixed) point of C.
Mann’s algorithm (1.1) has extensively been studied [2–7], and in particular, it is known that if T is nonexpansive (i.e., for all ) and if T has a fixed point, then the sequence generated by Mann’s algorithm (1.1) converges weakly to a fixed point of T provided the sequence satisfies the condition
This algorithm, however, does not converge in the strong topology in general (see [[8], Corollary 5.2]).
Browder and Petryshyn [9] studied weak convergence of Mann’s algorithm (1.1) for the class of strict pseudocontractions (in the case of constant stepsizes for all n; see [10] for the general case of variable stepsizes). However, Mann’s algorithm fails to converge for Lipschitzian pseudocontractions (see the counterexample of Chidume and Mutangadura [11]). It is therefore an interesting question of inventing iterative algorithms which generate a sequence converging in the norm topology to a fixed point of a Lipschitzian pseudocontraction (if any). The interest of pseudocontractions lies in their connection with monotone operators; namely, T is a pseudocontraction if and only if the complement is a monotone operator.
We also notice that it is quite usual to seek a particular solution of a given nonlinear problem, in particular, the minimum-norm solution. For instance, given a closed convex subset C of a Hilbert space and a bounded linear operator , where is another Hilbert space. The C-constrained pseudoinverse of A, is then defined as the minimum-norm solution of the constrained minimization problem
which is equivalent to the fixed point problem
where is the metric projection from onto C, is the adjoint of A, is a constant, and is such that .
It is therefore an interesting problem to invent iterative algorithms that can generate sequences which converge strongly to the minimum-norm solution of a given fixed point problem. The purpose of this paper is to solve such a problem for pseudocontractions. More precisely, we shall introduce an iterative algorithm for the construction of fixed points of Lipschitzian pseudocontractions and prove that our algorithm (see (3.1) in Section 3) converges in the strong topology to the minimum-norm fixed point of the mapping.
For the existing literature on iterative methods for pseudocontractions, the reader can consult [10, 12–26]; for finding minimum-norm solutions of nonlinear fixed point and variational inequality problems, see [27–29]; and for related iterative methods for nonexpansive mappings, see [2, 3, 30, 31] and the references therein.
2 Preliminaries
Let H be a real Hilbert space with the inner product and the norm , respectively. Let C be a nonempty closed convex subset of H. The class of nonlinear mappings which we will study is the class of pseudocontractions. Recall that a mapping is a pseudocontraction if it satisfies the property
It is not hard to find that T is a pseudocontraction if and only if T satisfies one of the following two equivalent properties:
-
(a)
for all ; or
-
(b)
is monotone on C: for all .
Recall that a mapping is nonexpansive if
It is immediately clear that nonexpansive mappings are pseudocontractions.
Recall also that the nearest point (or metric) projection from H onto C is defined as follows: For each point , is the unique point in C with the property
Note that is characterized by the inequality
Consequently, is nonexpansive.
In the sequel we shall use the following notations:
-
stands for the set of fixed points of S;
-
stands for the weak convergence of to x;
-
stands for the strong convergence of to x.
Below is the so-called demiclosedness principle for nonexpansive mappings.
Lemma 2.1 (cf. [32])
Let C be a nonempty closed convex subset of a real Hilbert space H, and let be a nonexpansive mapping with fixed points. If is a sequence in C such that and , then .
We also need the following lemma whose proof can be found in literature (cf. [33]).
Lemma 2.2 Let C be a nonempty closed convex subset of a real Hilbert space H. Assume that a mapping is monotone and weakly continuous along segments (i.e., weakly as , whenever for ). Then the variational inequality
is equivalent to the dual variational inequality
Finally, we state the following elementary result on convergence of real sequences.
Lemma 2.3 ([30])
Let be a sequence of nonnegative real numbers satisfying
where and satisfy
-
(i)
;
-
(ii)
either or .
Then converges to 0.
3 An iterative algorithm and its convergence
Throughout this section we assume that C is a nonempty closed subset of a real Hilbert space H and is a pseudocontraction with a nonempty fixed point set . The aim of this section is to introduce an iterative method for finding the minimum-norm fixed point of T. Towards this, we select two sequences of real numbers, and in the interval such that
for all n. We also take an arbitrary initial guess . We then define an iterative algorithm which generates a sequence via the following recursion:
We shall prove that this sequence strongly converges to the minimum-norm fixed point of T provided and satisfy certain conditions. To this end, we need the following lemma.
Lemma 3.1 Let be a contraction with coefficient . Let be a nonexpansive mapping with . For each , let be defined as the unique solution of the fixed point equation
Then, as , the net converges strongly to a point which solves the following variational inequality:
In particular, if we take , then the net defined via the fixed point equation
converges in norm, as , to the minimum-norm fixed point of S.
Proof First observe that, for each , is well defined. Indeed, if we define a mapping by
For , we have
which implies that is a self-contraction of C. Hence has a unique fixed point which is the unique solution of fixed point equation (3.3).
Next we prove that is bounded. Take . From (3.3) we have
that is,
Hence, is bounded and so is .
From (3.3) we have
Next we show that is relatively norm-compact as , i.e., we show that from any sequence in , a convergent subsequence can be extracted. Let be a sequence such that as . Put . From (3.5) we have
Again from (3.3) we get
It turns out that
where is a constant such that
In particular, we get from (3.7)
Since is bounded, without loss of generality, we may assume that converges weakly to a point . Noticing (3.6) we can use Lemma 2.1 to get . Therefore we can substitute for u in (3.8) to get
However, . This together with (3.9) guarantees that . The net is therefore relatively compact, as , in the norm topology.
Now we return to (3.8) and take the limit as to get
In particular, solves the following variational inequality:
By Lemma 2.2, we see that solves the variational inequality
Therefore, . That is, is the unique fixed point in of the contraction . Clearly this is sufficient to conclude that the entire net converges in norm to as .
Finally, if we take , then variational inequality (3.10) is reduced to
Equivalently,
This clearly implies that
Therefore, is the minimum-norm fixed point of S. This completes the proof. □
We are now in a position to prove the strong convergence of algorithm (3.2).
Theorem 3.2 Let C be a nonempty closed convex subset of a real Hilbert space H, and let be L-Lipschitzian and pseudocontractive with . Suppose that the following conditions are satisfied:
-
(i)
and ;
-
(ii)
;
-
(iii)
.
Then the sequence generated by algorithm (3.2) converges strongly to the minimum-norm fixed point of T.
Proof First we prove that the sequence is bounded. We will show this fact by induction. According to conditions (i) and (ii), there exists a sufficiently large positive integer m such that
Fix and take a constant such that
Next, we show that .
Set
Then, by using property (2.2) of the metric projection, we have
By the fact that is monotone, we have
From (3.2), (3.13) and (3.14), we obtain
It follows that
By (3.2), we have
Substitute (3.16) into (3.15) to obtain
that is,
By induction, we get
which implies that is bounded and so is . Now we take a constant such that
[Here for .]
Set (i.e., S is a resolvent of the monotone operator ). We then have that S is a nonexpansive self-mapping of C and (cf. Theorem 6 of [34]).
By Lemma 3.1, we know that whenever and , the sequence defined by
converges strongly to the minimum-norm fixed point of S (and of T as ). Without loss of generality, we may assume that for all n.
It suffices to prove that as (for some ). To this end, we rewrite (3.18) as
By using the property of metric projection (2.2), we have
Note that
Hence, we get
From (3.18) we have
It follows that
Set
By condition (ii), and for n large enough. Hence, by (3.19) and (3.20) we have
and
By (3.2) we have
Next, we estimate . Since , . Using (3.21) and by the fact that T is L-Lipschitzian and pseudocontractive, we infer that
which leads to
It follows that, using (3.21), (3.22) and (3.23), we get
where the finite constant is given by
Let
and note that by (3.1) it follows that . Moreover, set
Then relation (3.24) is rewritten as
By conditions (i), (ii) and (iii), it is easily found that
We can therefore apply Lemma 2.3 to (3.25) and conclude that as . This completes the proof. □
Remark 3.3 Choose the sequences and such that
where . It is clear that conditions (i) and (ii) of Theorem 3.2 are satisfied. To verify condition (iii), we compute
Therefore, and satisfy all three conditions (i)-(iii) in Theorem 3.2.
4 Application
To show an application of our results, we deal with the following problem.
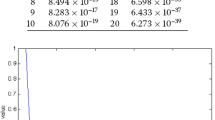
Problem 4.1 Let and define the sequence by the recursion
At which value does approach as n goes to infinity?
We claim that and it can be easily derived by applying Theorem 3.2.
Proof In order to apply our result, let , and define by
Observe that T is Lipschitzian, pseudocontractive and that . Moreover, if we set and , then
-
(i)
and ;
-
(ii)
;
-
(iii)
.
Then Theorem 3.2 ensures that
□
References
Mann WR: Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4: 506–510. 10.1090/S0002-9939-1953-0054846-3
Geobel K, Kirk WA Cambridge Studies in Advanced Mathematics 28. In Topics in Metric Fixed Point Theory. Cambridge University Press, Cambridge; 1990.
Goebel K, Reich S: Uniform Convexity, Hyperbolic Geometry and Nonexpansive Mappings. Dekker, New York; 1984.
Reich S: Weak convergence theorems for nonexpansive mappings in Banach spaces. J. Math. Anal. Appl. 1979, 67: 274–276. 10.1016/0022-247X(79)90024-6
Reich S, Zaslavski AJ: Convergence of Krasnoselskii-Mann iterations of nonexpansive operators. Math. Comput. Model. 2000, 32: 1423–1431. 10.1016/S0895-7177(00)00214-4
Suzuki T: Strong convergence of approximated sequences for nonexpansive mappings in Banach spaces. Proc. Am. Math. Soc. 2007, 135: 99–106.
Xu HK: A variable Krasnoselskii-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 2006, 22: 2021–2034. 10.1088/0266-5611/22/6/007
Bauschke HH, Matous̆ková E, Reich S: Projection and proximal point methods: convergence results and counterexamples. Nonlinear Anal., Theory Methods Appl. 2004, 56: 715–738. 10.1016/j.na.2003.10.010
Browder FE, Petryshyn WV: Construction of fixed points of nonlinear mappings in Hilbert spaces. J. Math. Anal. Appl. 1967, 20: 197–228. 10.1016/0022-247X(67)90085-6
Marino G, Xu HK: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2007, 329: 336–346. 10.1016/j.jmaa.2006.06.055
Chidume CE, Mutangadura SA: An example on the Mann iteration method for Lipschitz pseudo-contractions. Proc. Am. Math. Soc. 2001, 129: 2359–2363. 10.1090/S0002-9939-01-06009-9
Ceng LC, Petrusel A, Yao JC: Strong convergence of modified implicit iterative algorithms with perturbed mappings for continuous pseudocontractive mappings. Appl. Math. Comput. 2009, 209: 162–176. 10.1016/j.amc.2008.10.062
Chidume CE, Abbas M, Ali B: Convergence of the Mann iteration algorithm for a class of pseudocontractive mappings. Appl. Math. Comput. 2007, 194: 1–6. 10.1016/j.amc.2007.04.059
Chidume CE, Zegeye H: Iterative solution of nonlinear equations of accretive and pseudocontractive types. J. Math. Anal. Appl. 2003, 282: 756–765. 10.1016/S0022-247X(03)00252-X
Ciric L, Rafiq A, Cakic N, Ume JS: Implicit Mann fixed point iterations for pseudo-contractive mappings. Appl. Math. Lett. 2009, 22: 581–584. 10.1016/j.aml.2008.06.034
Huang NJ, Bai MR: A perturbed iterative procedure for multivalued pseudo-contractive mappings and multivalued accretive mappings in Banach spaces. Comput. Math. Appl. 1999, 37: 7–15. 10.1016/S0898-1221(99)00072-3
Ishikawa S: Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44: 147–150. 10.1090/S0002-9939-1974-0336469-5
Lan KQ, Wu JH: Convergence of approximants for demicontinuous pseudo-contractive maps in Hilbert spaces. Nonlinear Anal. 2002, 49: 737–746. 10.1016/S0362-546X(01)00130-4
Lopez Acedo G, Xu HK: Iterative methods for strict pseudo-contractions in Hilbert spaces. Nonlinear Anal. 2007, 67: 2258–2271. 10.1016/j.na.2006.08.036
Moore C, Nnoli BVC: Strong convergence of averaged approximants for Lipschitz pseudocontractive maps. J. Math. Anal. Appl. 2001, 260: 269–278. 10.1006/jmaa.2001.7516
Qin X, Cho YJ, Kang SM, Zhou H: Convergence theorems of common fixed points for a family of Lipschitz quasi-pseudocontractions. Nonlinear Anal. 2009, 71: 685–690. 10.1016/j.na.2008.10.102
Udomene A: Path convergence, approximation of fixed points and variational solutions of Lipschitz pseudo-contractions in Banach spaces. Nonlinear Anal. 2007, 67: 2403–2414. 10.1016/j.na.2006.09.001
Yao Y, Liou YC, Marino G: A hybrid algorithm for pseudo-contractive mappings. Nonlinear Anal. 2009, 71: 4997–5002. 10.1016/j.na.2009.03.075
Yao Y, Liou YC, Marino G: Strong convergence of two iterative algorithms for nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2009. 10.1155/2009/279058
Zegeye H, Shahzad N, Mekonen T: Viscosity approximation methods for pseudocontractive mappings in Banach spaces. Appl. Math. Comput. 2007, 185: 538–546. 10.1016/j.amc.2006.07.063
Zhang Q, Cheng C: Strong convergence theorem for a family of Lipschitz pseudocontractive mappings in a Hilbert space. Math. Comput. Model. 2008, 48: 480–485. 10.1016/j.mcm.2007.09.014
Cui YL, Liu X: Notes on Browder’s and Halpern’s methods for nonexpansive maps. Fixed Point Theory 2009,10(1):89–98.
Yao Y, Chen R, Xu HK: Schemes for finding minimum-norm solutions of variational inequalities. Nonlinear Anal. 2010, 72: 3447–3456. 10.1016/j.na.2009.12.029
Yao Y, Xu HK: Iterative methods for finding minimum-norm fixed points of nonexpansive mappings with applications. Optimization 2011, 60: 645–658. 10.1080/02331930903582140
Xu HK: Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298: 279–291. 10.1016/j.jmaa.2004.04.059
Yao Y, Yao JC: On modified iterative method for nonexpansive mappings and monotone mappings. Appl. Math. Comput. 2007, 186: 1551–1558. 10.1016/j.amc.2006.08.062
Browder FE: Semicontraction and semiaccretive nonlinear mappings in Banach spaces. Bull. Am. Math. Soc. 1968, 74: 660–665. 10.1090/S0002-9904-1968-11983-4
Lu X, Xu HK, Yin X: Hybrid methods for a class of monotone variational inequalities. Nonlinear Anal. 2009, 71: 1032–1041. 10.1016/j.na.2008.11.067
Zhou H: Strong convergence of an explicit iterative algorithm for continuous pseudo-contractions in Banach spaces. Nonlinear Anal. 2009, 70: 4039–4046. 10.1016/j.na.2008.08.012
Acknowledgements
Yonghong Yao was supported in part by NSFC 71161001-G0105. Yeong-Cheng Liou was supported in part by NSC 101-2628-E-230-001-MY3 and NSC 101-2622-E-230-005-CC3.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yao, Y., Marino, G., Xu, HK. et al. Construction of minimum-norm fixed points of pseudocontractions in Hilbert spaces. J Inequal Appl 2014, 206 (2014). https://doi.org/10.1186/1029-242X-2014-206
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-206