
Abstract
This paper is concerned with the shunting inhibitory cellular neural networks (SICNNs) with time-varying delays in the leakage (or forgetting) terms. Under proper conditions, we employ a novel argument to establish a criterion on the global exponential stability of almost periodic solutions by using Lyapunov functional method and differential inequality techniques. We also provide numerical simulations to support the theoretical result.
Similar content being viewed by others

1 Introduction
It is well known that shunting inhibitory cellular neural networks (SICNNs) have been introduced as new cellular neural networks (CNNs) in Bouzerdout and Pinter in [1–3], which can be described by
where denotes the cell at the position of the lattice. The r-neighborhood is given as
is similarly specified. is the activity of the cell , is the external input to , the function represents the passive decay rate of the cell activity, and are the connection or coupling strength of postsynaptic activity of the cell transmitted to the cell , and the activity functions and are continuous functions representing the output or firing rate of the cell , and corresponds to the transmission delay.
Recently, SICNNs have been extensively applied in psychophysics, speech, perception, robotics, adaptive pattern recognition, vision, and image processing. Hence, they have been the object of intensive analysis by numerous authors in recent years. In particular, there have been extensive results on the problem of the existence and stability of the equilibrium point, periodic and almost periodic solutions of SICNNs with time-varying delays in the literature. We refer the reader to [4–9] and the references cited therein. Obviously, the first term in each of the right side of (1.1) corresponds to a stabilizing negative feedback of the system, which acts instantaneously without time delay; these terms are variously known as ‘forgetting’ or leakage terms (see, for instance, Kosko [10], Haykin [11]). It is known from the literature on population dynamics and neural networks dynamics (see Gopalsamy [12]) that time delays in the stabilizing negative feedback terms will have a tendency to destabilize a system. Therefore, the authors of [13–19] dealt with the existence and stability of equilibrium and periodic solutions for neuron networks model involving leakage delays. However, to the best of our knowledge, few authors have considered the existence and exponential stability of almost periodic solutions of SICNNs with time-varying delays in the leakage terms. Motivated by the discussions above, in this paper, we consider the following SICNNs with time-varying leakage delays:
where , , , , and are almost periodic functions, and denote the leakage delay and transmission delay, respectively, the delay kernels are continuous and integrable, and is a bounded continuous function.
The main purpose of this paper is to give the conditions for the existence and exponential stability of the almost periodic solutions for system (1.2). By applying Lyapunov functional method and differential inequality techniques, we derive some new sufficient conditions ensuring the existence, uniqueness and exponential stability of the almost periodic solution for system (1.2), which are new and complement previously known results. Moreover, an example with numerical simulations is also provided to illustrate the effectiveness of our results.
Throughout this paper, for , from the theory of almost periodic functions in [20, 21], it follows that for all , it is possible to find a real number , for any interval with length , there exists a number in this interval such that
for all , .
We set
For , we define the norm . For the convenience, we shall introduce the notations
where is a bounded continuous function.
We also make the following assumptions.
(T1) There exist constants , , and such that
(T2) For , ,
and there exist positive constants and λ such that
and
The initial conditions associated with system (1.2) are of the form
where denotes a real-valued bounded continuous function defined on .
Let be continuous in t. is said to be almost periodic on R if for any , the set is relatively dense, i.e., for any , it is possible to find a real number , for any interval with length , there exists a number in this interval such that for all .
2 Preliminary results
The following lemmas will be useful to prove our main results in Section 3.
Lemma 2.1 Let (T1) and (T2) hold. Suppose that is a solution of system (1.2) with initial conditions
Then
and
Proof Assume, by way of contradiction, that (2.2) does not hold. Then, there exist , and such that
where
It follows that
Consequently, in view of (2.5) and the fact (), we have
From system (1.2), we derive
Calculating the upper left derivative of , together with (2.4), (2.6), (2.7), (T1) and (T2), we obtain
It is a contradiction, and it shows that (2.2) holds. Then, using a similar argument as in the proof of (2.5) and (2.6), we can show that (2.3) holds. The proof of Lemma 2.1 is now completed. □
Remark 2.1 In view of the boundedness of this solution, from the theory of functional differential equations with infinite delay in [22], it follows that the solution of system (1.2) with initial conditions (2.1) can be defined on .
Lemma 2.2 Suppose that (T1) and (T2) hold. Moreover, assume that is a solution of system (1.2) with initial function satisfying (2.1), and is bounded continuous on . Then for any , there exists , such that every interval contains at least one number δ, for which there exists satisfying
Proof For , set
By Lemma 2.1, the solution is bounded and
Thus, the right side of (1.2) is also bounded, which implies that is uniformly continuous on R. From (1.3), for any , there exists , such that every interval , , contains a δ, for which
Let be sufficiently large such that for , and denote . We obtain
which yields
Set
where
Let be such an index that
Calculating the upper left derivative of along (2.11), we have
Let
It is obvious that , and is non-decreasing. In particular,
Consequently, in view of (2.15) and the fact (), we have
Now, we consider two cases.
Case (i). If
Then, we claim that
Assume, by way of contradiction, that (2.18) does not hold. Then, there exists such that . Since
There must exist such that
which contradicts (2.17). This contradiction implies that (2.18) holds. It follows from (2.16) that there exists such that
Case (ii). If there is such a point that . Then, in view of (1.5), (2.9), (2.10), (2.13), (2.16), (T1) and (T2), we get
which yields that
and
For any , by the same approach used in the proof of (2.21) and (2.22), we have
On the other hand, if and , we can choose such that
which, together with (2.23), yields that
Using a similar argument as in the proof of Case (i), we can show that
which implies that
In summary, there must exist such that holds for all . The proof of Lemma 2.2 is now complete. □
3 Main results
In this section, we establish some results for the existence, uniqueness and exponential stability of the almost periodic solution of (1.2).
Theorem 3.1 Suppose that (T1) and (T2) are satisfied. Then system (1.2) has exactly one almost periodic solution . Moreover, is globally exponentially stable.
Proof Let be a solution of system (1.2) with initial function satisfying (2.1), and is bounded continuous on .
Set
where is any sequence of real numbers. By Lemma 2.1, the solution is bounded and
which implies that the right side of (1.2) is also bounded, and is a bounded function on R. Thus, is uniformly continuous on R. Then, from the almost periodicity of , , τ, and , we can select a sequence such that
for all , .
Since is uniformly bounded and equiuniformly continuous, by Arzala-Ascoli lemma and diagonal selection principle, we can choose a subsequence of , such that (for convenience, we still denote by ) uniformly converges to a continuous function on any compact set of R, and
Now, we prove that is a solution of (1.2). In fact, for any and , from (3.3), we have
which implies that
Therefore, is a solution of (1.2).
Secondly, we prove that is a almost periodic solution of (1.2). From Lemma 2.2, for any , there exists , such that every interval contains at least one number δ for which there exists satisfying
Then, for any fixed , we can find a sufficient large positive integer such that for any
Let , we obtain
which implies that is an almost periodic solution of (1.2).
Finally, we prove that is globally exponentially stable.
Let be the positive almost periodic solution of system (1.2) with initial value , and let be an arbitrary solution of system (1.2) with initial value , set . Then
which yields
where .
Let
We define a positive constant M as follows:
Let K be a positive number such that
We claim that
Otherwise, there must exist and such that
It follows that
Consequently, in view of (3.14) and the fact (), we have
Calculating the upper left derivative of , together with (2.3), (3.10), (3.13), (3.15), (T1) and (T2), we obtain
which is a contradiction, and it implies that (3.12) holds.
Consequently, using a similar argument as in ( 3.14)-(3.15), we know that
That is,
This completes the proof. □
4 An example
In this section, we give an example with numerical simulations to demonstrate the results obtained in previous sections.
Example 4.1 Consider the following SICNNs with time-varying delays in the leakage terms:
Set
and
clearly,
where . Then,
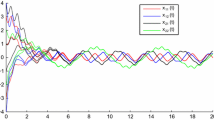
It follows that system (4.1) satisfies all the conditions in Theorem 3.1. Hence, system (4.1) has exactly one positive almost periodic solution. Moreover, the almost periodic solution is globally exponentially stable. The fact is verified by the numerical simulation in Figures 1-3 and their three different initial values, which are , , , , , , , , ; , , , , , , , , and , , , , , , , , , respectively.

Numerical solutions of system ( 4.1 ) for different initial values.

Numerical solutions of system ( 4.1 ) for different initial values.

Numerical solutions of system ( 4.1 ) for different initial values.
Remark 4.1 Since [4–9] only dealt with SICNNs without leakage delays, and [14–19, 23, 24] give no opinions about the problem of almost periodic solutions for SICNNs with time-varying leakage delays. One can observe that all the results in this literature and the references therein can not be applicable to prove the existence and exponential stability of almost periodic solutions for SICNNs (4.1). In this present paper, we employ a novel proof to establish some criteria to guarantee the existence and exponential stability of almost periodic solutions for SICNNs system with time-varying coefficients and leakage delays. What will happen when one can increase the neuron’s order? Whether or not our results and method in this paper are available for this case, it is an interesting problem, and we leave it as our work in the future.
References
Bouzerdoum A, Pinter RB: Shunting inhibitory cellular neural networks: derivation and stability analysis. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 1993, 40: 215–221. 10.1109/81.222804
Bouzerdoum A, Pinter RB: Analysis and analog implementation of directionally sensitive shunting inhibitory cellular neural networks. SPIE 1473. Visual Information Processing: From Neurons to Chips 1991, 29–38.
Bouzerdoum A, Pinter RB: Nonlinear lateral inhibition applied to motion detection in the fly visual system. In Nonlinear Vision. Edited by: Pinter RB, Nabet B. CRC Press, Boca Raton; 1992:423–450.
Chen A, Cao J, Huang L: Almost periodic solution of shunting inhibitory CNNs with delays. Phys. Lett. A 2002, 298: 161–170. 10.1016/S0375-9601(02)00469-3
Chen A, Huang X: Almost periodic attractor of delayed neural networks with variable coefficients. Phys. Lett. A 2005, 340(1–4):104–120. 10.1016/j.physleta.2005.04.021
Cai M, Zhang H, Yuan Z: Positive almost periodic solutions for shunting inhibitory cellular neural networks with time-varying delays. Math. Comput. Simul. 2008, 78(4):548–558. 10.1016/j.matcom.2007.08.001
Shao J: Anti-periodic solutions for shunting inhibitory cellular neural networks with time-varying delays. Phys. Lett. A 2008, 372(30):5011–5016. 10.1016/j.physleta.2008.05.064
Fan Q, Shao J: Positive almost periodic solutions for shunting inhibitory cellular neural networks with time-varying and continuously distributed delays. Commun. Nonlinear Sci. Numer. Simul. 2010, 15(6):1655–1663. 10.1016/j.cnsns.2009.06.026
Zhao C, Fan Q, Wang W: Anti-periodic solutions for shunting inhibitory cellular neural networks with time-varying coefficients. Neural Process. Lett. 2010, 31: 259–267. 10.1007/s11063-010-9136-y
Kosko B: Neural Networks and Fuzzy Systems. Prentice Hall, New Delhi; 1992.
Haykin S: Neural Networks. Prentice Hall, New Jersey; 1999.
Gopalsamy K: Stability and Oscillations in Delay Differential Equations of Population Dynamics. Kluwer Academic, Dordrecht; 1992.
Gopalsamy K: Leakage delays in BAM. J. Math. Anal. Appl. 2007, 325: 1117–1132. 10.1016/j.jmaa.2006.02.039
Li X, Cao J: Delay-dependent stability of neural networks of neutral type with time delay in the leakage term. Nonlinearity 2010, 23: 1709–1726. 10.1088/0951-7715/23/7/010
Li X, Rakkiyappan R, Balasubramaniam P: Existence and global stability analysis of equilibrium of fuzzy cellular neural networks with time delay in the leakage term under impulsive perturbations. J. Franklin Inst. 2011, 348: 135–155. 10.1016/j.jfranklin.2010.10.009
Balasubramaniam P, Vembarasan V, Rakkiyappan R: Leakage delays in T - S fuzzy cellular neural networks. Neural Process. Lett. 2011, 33: 111–136. 10.1007/s11063-010-9168-3
Liu B: Global exponential stability for BAM neural networks with time-varying delays in the leakage terms. Nonlinear Anal., Real World Appl. 2013, 14: 559–566. 10.1016/j.nonrwa.2012.07.016
Chen Z: A shunting inhibitory cellular neural network with leakage delays and continuously distributed delays of neutral type. Neural Comput. Appl. 2012. 10.1007/s00521-012-1200-2
Zhang H: Global exponential stability of almost periodic solutions for SICNNs with continuously distributed leakage delays. Abstr. Appl. Anal. 2013., 2013: Article ID 307981 10.1155/2013/307981
Fink AM Lecture Notes in Mathematics 377. In Almost Periodic Differential Equations. Springer, Berlin; 1974.
He CY: Almost Periodic Differential Equation. Higher Education Publishing House, Beijing; 1992. (in Chinese)
Hino Y, Murakami S, Nai T Lecture in Mathematics 1473. In Functional Differential Equations with Infinite Delay. Springer, Berlin; 1991.
Zhang H, Shao J: Almost periodic solutions for cellular neural networks with time-varying delays in leakage terms. Appl. Comput. Math. 2013, 219(24):11471–11482. 10.1016/j.amc.2013.05.046
Balasubramaniam P, Vembarasan V: Global asymptotic stability results for BAM neural networks of neutral-type with time delays in the leakage term under impulsive perturbations. Int. J. Comput. Math. 2011, 88: 3271–3291. 10.1080/00207160.2011.591388
Acknowledgements
This work was supported by the construct program of the key discipline in Hunan province (Mechanical Design and Theory), the Scientific Research Fund of Hunan Provincial Natural Science Foundation of PR China (Grant No. 11JJ6006), the Natural Scientific Research Fund of Hunan Provincial Education Department of PR China (Grants No. 11C0916, 11C0915), and the Natural Scientific Research Fund of Zhejiang Provincial Education Department of PR China (Grants No. LY12A01018, Y6110436).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
BL gave the proof of Lemmas 2.1-2.2 and drafted the manuscript. JS proved Theorem 3.1 and gave the example to illustrate the effectiveness of the obtained results. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Liu, B., Shao, J. Almost periodic solutions for SICNNs with time-varying delays in the leakage terms. J Inequal Appl 2013, 494 (2013). https://doi.org/10.1186/1029-242X-2013-494
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2013-494