
Abstract
In this paper, we extend a recent proposed model of two scalar and two vector fields to a hyperbolic inflation scenario, in which the field space of two scalar fields is a hyperbolic space instead of a flat space. In this model, one of the scalar fields is assumed to be a radial field, while the other is set as an angular field. Furthermore, both scalar fields will be coupled to two different vector fields, respectively. As a result, we are able to obtain a set of exact Bianchi type I solutions to this model. Stability analysis is also performed to show that this set of anisotropic solutions is indeed stable and attractive during the inflationary phase. This result indicates that the cosmic no-hair conjecture is extensively violated in this anisotropic hyperbolic inflation model.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Cosmic inflation [1,2,3,4] has been regarded as a leading paradigm in modern cosmology. This result is due to the fact that many of its theoretical predictions have been shown to be highly consistent with the leading cosmic microwave background radiation (CMB) probes such as the Wilkinson Microwave Anisotropy Probe (WMAP) [5] and the Planck [6,7,8]. It is worth noting that the backbone of all standard inflationary models [9] has been the cosmological principle [10,11,12,13], whose statement is that our universe is just simply homogeneous and isotropic on large scales as described by the Friedmann–Lemaitre–Robertson–Walker (FLRW) spacetime [14]. However, it is not straightforward to verify the validity of this principle [10,11,12,13].
It is important to note that some CMB anomalies such as the hemispherical asymmetry and the cold spot have been detected by the WMAP and then confirmed by the Planck [15]. Remarkably, these anomalies are beyond the predictions of all standard inflationary models. It appears that a number of mechanisms, in accordance with the cosmological principle, have been proposed in order to reveal the nature of these anomalies [15]. For instance, there have been some interesting ideas that the CMB statistical anisotropy could be caused by instruments [16,17,18]. However, a follow-up study has pointed out that they seem to be invalid [19]. As a result, the physics behind the mentioned CMB anomalies has remained unknown up to now [15]. All these results lead us to think of a possibility that the cosmological principle might no longer be valid in the early universe. If so, it might lead to nontrivial deviations from the predictions of standard inflationary models [20, 21], which might also provide resolutions to other problems. For example, it has been shown that the Hubble tension might be an indication of the breakdown of the FLRW cosmology [22].
Remarkably, a recent study has revealed an interesting smoking gun evidence that the current universe might be anisotropic, i.e., might violate the cosmological principle [23]. This is indeed contrast to the statement of the so-called cosmic no-hair conjecture proposed by Hawking and his colleagues long ago [24, 25]. The no-hair conjecture states that the late time universe would be homogeneous and isotropic, i.e., would obey the cosmological principle, regardless of initial states of the universe, which might or might not violate the cosmological principle. The no-hair conjecture is, however, very difficult to prove. It turns out that there have been a number of partial proofs, e.g., see Refs. [26,27,28,29,30,31,32] for this conjecture since the first rigorous proof by Wald for the Bianchi spacetimes with a cosmological constant, which are homogeneous but anisotropic [33, 34]. Nevertheless, a general proof for this conjecture has remained as a great challenge to physicists and cosmologists for several decades. It is worth noting that if the cosmic no-hair conjecture is valid, it would only be valid locally, i.e., inside of the future event horizon, according to the studies by Starobinsky and the other people [35,36,37,38,39].
Besides the proofs mentioned above, counterexamples to the cosmic no-hair conjecture have been proposed in different frameworks such as higher order models of gravity [40,41,42,43,44], the Lorentz Chern–Simons model [45], and the Galileon models [46,47,48]. However, many of them have been shown to be invalid due to their instability during an inflationary phase [49,50,51,52]. Recently, the first vivid counterexample to the cosmic no-hair conjecture has been constructed successfully by Kanno, Soda, and Watanabe (KSW) [53, 54]. As a result, this counterexample is nothing but a stable and attractive Bianchi type I inflationary solution of a supergravity-motivated model, which involves a special coupling between scalar and vector fields of the form \(f^2(\phi )F_{\mu \nu }F^{\mu \nu }\) [54]. Consequently, a number of extensions of the KSW model have been proposed in order to either examine the validity of the cosmic no-hair conjecture or investigate the corresponding CMB imprints of anisotropic inflation [55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97]. For interesting reviews on the KSW anisotropic inflation, see Refs. [98, 99]. It should be noted that the existence of the time-dependent function \(f(\phi )\) does break down the conformal invariance of electromagnetic field. Therefore, the KSW anisotropic inflation might have a close connection with the origin of large-scale galactic electromagnetic fields in the present universe as suggested by Refs. [100, 101]. In other words, the appearance of the late time large-scale galactic electromagnetic fields might be a reasonable evidence for the existence of the anisotropic inflationary universe. Moreover, if the KSW anisotropic inflation is stable and viable, then the unavoidable appearance of the late time large-scale galactic electromagnetic fields might be an additional smoking gun evidence for the breaking of the cosmological principle not only in the early universe but also in the late time universe.
Recently, we have proposed a multi scalar and vector fields model, which generalizes many previous extensions of the KSW model [82]. In this paper, two scalar fields are allowed to non-minimally couple to two vector fields, respectively. Furthermore, this model has been shown to admit an exact Bianchi type I power-law solution, which turns out to be stable and attractive during its inflationary phase. In addition to our model, a recent interesting paper [83] has proposed a different multi-scalar-field extension of the KSW model, which is based on an interesting novel type of inflation called a hyperbolic inflation [102]. Basically, the hyperbolic inflation model contains two scalar fields, whose two-dimensional field space is hyperbolic instead of a conventional flat one [103]. One of the scalar fields is referred to as a radial field, while the other one is called an angular field. In this type of inflation, the inflaton, described by the radial field, never slow-rolls and instead orbits the bottom of the potential, buoyed by a centrifugal force [102]. Consequently, many follow-up works have been done to investigate extensively cosmological aspects of this hyperbolic inflation [104,105,106]. It is noted that only the radial field is non-minimally coupled to a vector field in an anisotropic hyperbolic inflation model proposed in Ref. [83]. Naturally, one can ask if the angular field is also non-minimally coupled to a vector field. Apparently, this scenario is similar to our recent model proposed in Ref. [82]. This motivates us to study in this paper a non-trivial combination of these two extensions of the KSW model. In particular, we will investigate whether an anisotropic hyperbolic inflation [83] will appear in a model of two scalar and two vector fields [82]. Stability analysis will be performed to check if the obtained inflationary solution violates the cosmic no-hair conjecture.
As a result, this paper will be organized as follows: (i) A brief introduction of this study has been presented in Sect. 1. (ii) A basic setup of hyperbolic model with two scalar fields coupled to two vector fields will be introduced in Sect. 2. (iii) Anisotropic power-law solutions will be figured out in Sect. 3. (iv) Then, the stability of the obtained solutions will be analyzed using the dynamical system method in Sect. 4. (v) Finally, concluding remarks will be written in Sect. 5.
2 The model
In this paper, we would like to study a non-trivial combination of the KSW model [53, 54] and the hyperbolic inflation [102], which was proposed in Ref. [83] such as
where the reduced Planck mass \(M_p\) has been set to be one for convenience. It is noted that \(F^a_{\mu \nu } = \partial _\mu A^a_\nu -\partial _\nu A^a_\mu \) is the field strength of vector field \(A^a_\mu \). In addition, \(G_{ab}\) is a metric of scalar field space. It should be noted that \(f_{ab}\) has been called a gauge kinetic function within the supergravity theory [54]. However, ones have regarded \(f_{ab}\), in analogy to \(G_{ab}\), as a metric of vector field space [83]. Both of these metrics have been assumed to be functions of scalar fields in Ref. [83]. In this paper, the scalar field and vector field spaces will be assumed to be two-dimensional as
respectively. As a result, the corresponding metrics turn out to be
respectively. Here \(L>0\) is the curvature scale (length) of the hyperbolic space [102], while \(\omega =\pm 1\). Interestingly, the existence of \(\omega \) does not affect on the value of the curvature of scalar field space, which is always equal to \(-2/L^2 <0\). In other words, the scalar field space is always hyperbolic with negative curvature regardless of the value of \(\omega \).
It should be noted that we have renamed \(\phi ^1 =\phi \) and \(\phi ^2=\psi \) for convenience. It is noted that \(\phi \) is called a radial field, while \(\psi \) is called an angular field. It is also noted that \(f_1(\phi )\) and \(f_2(\psi )\) are arbitrary functions of \(\phi \) and \(\psi \), respectively. In addition, we will assume in this paper that \(V(\phi ^1,\phi ^2)=V_1(\phi ) +V_2(\psi )\), in contrast to Ref. [83] where only \(V_1(\phi )\) is introduced. It is noted that the configuration of the scalar field space has been proposed in Refs. [83, 102], while the configuration of the vector field space follows our recent paper [82], in which two scalar fields are allowed to non-minimally coupled to two vector fields, respectively.
As a result, the above action (2.1) now reduces to the following form,
which acts as a hyperbolic generalization of a recent multi-field extension of the KSW model [82]. In this action, \(F^1_{\mu \nu }\equiv F_{\mu \nu } = \partial _\mu A_\nu -\partial _\nu A_\mu \) is the field strength of the first vector field \(A^1_\mu \equiv A_\mu \), while \(F^2_{\mu \nu }\equiv {{{\mathcal {F}}}}_{\mu \nu } = \partial _\mu {{{\mathcal {A}}}}_\nu -\partial _\nu {{{\mathcal {A}}}}_\mu \) is the field strength of the second vector field \(A^2_\mu \equiv {{{\mathcal {A}}}}_\mu \). Note that \(\psi \) will be a phantom-like scalar field if \(\omega \) is equal to \(-1\) [107,108,109,110,111].
As a result, varying the action (2.6) with respect to the metric \(g_{\mu \nu }\) will lead to the corresponding Einstein field equation of this model given by
Additionally, the corresponding equations of motion of two vector fields, i.e., \(A_\mu \) and \({{{\mathcal {A}}}}_\mu \), are defined to be
respectively. On the other hand, the corresponding equations of motion of two scalar fields, i.e., \(\phi \) and \(\psi \), turn out to be
respectively. It is noted that \(\partial _\phi \equiv \partial /\partial \phi \), \(\partial _\psi \equiv \partial /\partial \psi \), and \(\square \equiv \frac{1}{\sqrt{-g}} \partial _\mu \left( \sqrt{-g} \partial ^\mu \right) \). In this paper, we would like to figure out anisotropic hyperbolic solutions to this model. To do this task, we will consider the Bianchi type I metric, which is considered as the simplest homogeneous but anisotropic spacetime having the following form [53, 54]
where \(\sigma (t)\) is assumed to be a deviation from the spatial isotropy, which is governed by \(\alpha (t)\). This assumption corresponds to a sufficient condition that \(\sigma (t)\) should be much smaller than \(\alpha (t)\) during an inflationary phase. In accordance with the Bianchi type I metric having the \(y-z\) rotational symmetry as shown in Eq. (2.12), the configuration of two vector fields, \(A_\mu \) and \({{{\mathcal {A}}}}_\mu \), will be considered as \(A_\mu = \left( {0,A_x \left( t \right) ,0,0} \right) \) and \({{{\mathcal {A}}}}_\mu = \left( {0,{{{\mathcal {A}}}}_x \left( t \right) ,0,0} \right) \). Additionally, both scalar fields will be regarded as homogeneous ones, i.e., they will only be functions of cosmic time, \(\phi =\phi (t)\) and \(\psi =\psi (t)\).
As a result, the corresponding solutions of vector field equations, i.e., Eqs. (2.8) and (2.9), turn out to be
respectively. Here, \(p_A\) and \(q_A\) are integration constants. Thanks to these solutions, the field equations (2.7), (2.10), and (2.11) can be rewritten explicitly as follows
It turns out that we now have five equations for four variables, \(\alpha \), \(\sigma \), \(\phi \), and \(\psi \). However, it should be noted that Eq. (2.15) is nothing but the Friedmann equation, which just plays as a constraint field equation. On the other hand, the time evolution of the spatial isotropy \(\alpha \) will be described by Eqs. (2.16), while that of the spatial anisotropy \(\sigma \) will be determined by Eq. (2.17).
3 Power-law solutions for anisotropic hyperbolic inflation
It turns out that the above field equations are difficult to be solved to give a power-law inflation [112, 113] due to the existence of hyperbolic functions such as \(\sinh (\phi /L)\) and \(\coth (\phi /L)\). However, as suggested in Ref. [83] it is possible to figure out power-law solutions in the regime \(\phi \gg L\). It is due to the result that the hyperbolic functions can be approximated as exponential functions in this regime,
In this paper, we would like to figure out power-law solutions by choosing the following ansatz [54, 67, 82, 83]
together with the compatible potential and coupling functions, whose forms are given by [82, 83]
here \(\phi _0\), \(\psi _0\), \(\xi _i\), \(V_{0i}\), \(f_{0i}\), \(\lambda \), \(\rho \), n, and m are all non-vanishing parameters. As a result, the scale factors are now of power-law functions as
As a result, the value of \(\zeta \) and \(\eta \) will tell us how fast the expansion of our universe is. In particular, it appears that \(\zeta -2\eta >0\) and \(\zeta +\eta >0\) are two sufficient constraints for expanding universe, while \(\zeta -2\eta \gg 1\) and \(\zeta +\eta \gg 1\) are two sufficient constraints for inflationary universe [54, 67].
As a result, a set of algebraic equations is defined, in the regime \(\phi \gg L\), from the above field equations to be
where additional variables \(u_i\) and \(v_i\) have been introduced as
It is noted that the following constraints,
have been used to define the above set of algebraic equations. As a result, the last two constraints shown in Eqs. (3.21) and (3.22) imply that an useful relation
Furthermore, this relation can be simplified to
with the help of the other constraints shown in Eqs. (3.19) and (3.20). Consequently, it appears that
Here \(\kappa _1\) and \(\kappa _2\) are additional constants. On the other hand, both constraint equations (3.21) and (3.22) imply that
According to our recent paper [82], we introduce two additional variables
for convenience. As a result, u and v can be figured out from two equations, (3.9) and (3.10), as
respectively. As a result, we can further simplify Eq. (3.12) as
with the help of the constraint (3.18). Furthermore, combining this equation with Eq. (3.11) will lead to
with the help of the relation \(\rho L =-m\) derived from Eqs. (3.18) and (3.23). As a result, plugging the u and v defined in Eqs. (3.29) and (3.30) into Eq. (3.32) leads to the corresponding equation of \(\zeta \),
which can be solved to give a non-trivial solution of \(\zeta \),
As a result, this solution does satisfy Eq. (3.8) derived from the Friedmann constraint equation, regardless of non-vanishing value of \(u_0\). It turns out that this solution is similar to that found in a non-hyperbolic inflation model [82], in which \(V_2(\psi )=V_{02} \exp [\lambda _2 \psi ]\), \(f_2(\psi ) =f_{02}\exp [\rho _2 \psi ] \), and \(\psi =\xi _2 \log t+\psi _0\). To be more specific, there is a correspondence that \(n\sim \lambda _2\) and \(m \sim \rho _2\) between the two solutions of two different models, one is hyperbolic and the other is non-hyperbolic [82].
Given the solution of \(\zeta \), the corresponding \(\eta \) is defined to be
For the value of L, it appears from Eq. (3.18) that
with the help of Eqs. (3.23) and (3.24). As a result, the positivity of L implies that all n and m should be negative definite since \(\rho \) and \(\lambda \) are both assumed to be positive definite. It appears that if \(|m| \sim \rho \) as well as \(|n|\sim \lambda \) then \(L \sim {{{\mathcal {O}}}}(1)\). On the other hand, if \(\rho \gg |m| \) as well as \(\lambda \gg |n| \) then \(L \ll 1\).
Now, we would like to see whether these solutions represent inflationary one. As a result, the inflationary constraints, \(\zeta +\eta \gg 1\) and \(\zeta -2\eta \gg 1\) can be easily fulfilled if \(\rho \gg \lambda \) along with \(|m| \gg |n|\). Consequently, we have the following approximations as
In conclusion, an exact power-law solution of anisotropic hyperbolic inflation having a small spatial anisotropy, \(\Sigma /H \equiv {{\dot{\sigma }}}/{{\dot{\alpha }}} = \eta /\zeta \simeq 1/(3\kappa _1) \ll 1\), has been figured out in the regime that \(\phi \gg L\). More interestingly, this solution turns out to be similar to that found in the recent non-hyperbolic two scalar and two vector fields model [82]. Now, we would like to compare the present inflationary solution with the solutions found in Ref. [83]. It appears that, when \(V_2(\psi )\) and \(f_2(\psi )\) are removed altogether, the corresponding anisotropic hyperbolic inflation for one scalar-vector coupling has been given by [83]
where L now acts as a free parameter. Therefore, it is clear that \(\zeta _0 \simeq \rho /\lambda \simeq \zeta \gg 1 \) as well as \(\eta _0 \sim 1/6\) during an inflationary phase, provided that \(\rho /\lambda \sim 2/(3L\lambda )\). This result implies that the existence of the potential \(V_2(\psi )\) and the additional coupling between the angular and second vector fields, i.e., \(f_2^2(\psi ){{{\mathcal {F}}}}^2\), does not modify significantly the value of scale factors of the metric. In the next section, we will see whether this solution is stable or not. Additionally, we will numerically examine whether it is attractive or not. This is an important task in order to check the validity of the cosmic no-hair conjecture.
4 Stability analysis
In this section, we would like to investigate the stability of the obtained anisotropic power-law hyperbolic inflationary solution. It should be noted that in the present model both \(V_2(\psi )\) and \(f_2(\psi )\) have been assumed as power-law functions of \(\psi \). Hence, we should define the corresponding suitable dynamical variables, which might not be introduced in the previous paper, where both \(V_2(\psi )\) and \(f_2(\psi )\) are exponential functions of \(\psi \) [82]. Fortunately, this issue can be easily handled thanks to some earlier works investigating dynamical systems for cosmological models having power-law potentials of scalar field [114]. As a result, we will define, hinted by Refs. [54, 82, 83, 108, 114], the corresponding dimensionless dynamical variables as follows
where \({{\bar{\lambda }}}\) and \({{\bar{\rho }}}\) are defined as
Here, \(W_1\), \(W_2\), \(U_1\), and \(U_2\) are auxiliary dynamical variables, which help us to have a complete dynamical system [108, 114]. It is noted that the definition of \({{\bar{\lambda }}}\) and \({{\bar{\rho }}}\) for non-hyperbolic models should not involve \(2L^{-1}\exp \left( -{\phi }/{L} \right) \) [114]. It is clear that if both \(V_2(\psi )\) and \(f_2(\psi )\) are exponential functions of \(\psi \) as proposed in a non-hyperbolic inflation model [82] then both \({{\bar{\lambda }}}\) and \({{\bar{\rho }}}\) will be constant. Consequently, both \(U_1\) and \(U_2\) will also be constant and therefore cannot be dynamical variables. That is a reason why we did not introduce them in the previous paper [82].
As a result, we are able to have the following autonomous equations for the present model,
where \(\alpha \) plays as a new time coordinate related to the cosmic time t as \(d\alpha ={{\dot{\alpha }}} dt\). As a result, using the field equations obtained in the previous section, i.e., Eqs. (2.16), (2.17), (2.18), and (2.19), we will write down the explicit autonomous equations of dynamical system as follows
It is noted that the useful relation,
which is obtained from the Friedmann equation (2.15), has been used to derive the above dynamical system. Now, we would like to seek anisotropic fixed points with \(X\ne 0\) to this dynamical system and study their attractive property. Mathematically, fixed points of the dynamical system, which can be isotropic or anisotropic, are solutions of the following set of equations,
As a result, two equations, \({dU_1}/{d\alpha }={dU_2}/{d\alpha }=0\), give us a relation
provided a requirement that \(U_1 \ne 0\) and \(U_2 \ne 0\). Furthermore, this relation can be reduced to a relation between \(U_1\) and \(U_2\) as
As a result, a relation between \(Y_1\) and \(Y_2\) can be figured out from two equations, \({dW_1}/{d\alpha }={dW_2}/{d\alpha }=0\), as
along with an equation
Here, \(Z^2=Z_1^2+Z_2^2\) as an additional variable introduced for convenience. Additionally, another relation between \(Y_1\) and \(Y_2\) can be figured out from two other equations, \({dZ_1}/{d\alpha }={dZ_2}/{d\alpha }=0\), as
along with a relation between X and \(Y_1\) defined as
with the help of Eq. (4.30). Here, it is noted that all \(W_1\), \(W_2\), \(Z_1\), and \(Z_2\) have been regarded as non-vanishing variables, similar to \(U_1\) and \(U_2\) as well as \(Y_1\) and \(Y_2\). Interestingly, three relations shown in Eqs. (4.27), (4.29), and (4.31) imply that
which are nothing but that shown in Eqs. (3.24) and (3.25) in the previous section for the power-law solutions. Additionally, it appears from the equations, \(dW_1/d\alpha =dW_2/d\alpha =0\), that
with the help of Eqs. (4.29) and (4.31). This relation is identical to that shown in Eq. (3.36) in the previous section for the power-law solutions. It is straightforward to have from the relation (4.27) that
As a result, two equations, \({dY_1}/{d\alpha }={dY_2}/{d\alpha }=0\), imply an equation,
with the help of Eqs. (4.25), (4.29), (4.30), (4.33), (4.34), and (4.36). It is noted that we have used the result that
Now, the equation \(dX/d\alpha =0\), leads to an equation,
For convenience, we will rewrite Eq. (4.32) as
Up to now, we have derived three equations of three variables X, \(Y_1\), and Z, Eqs. (4.37), (4.39), and (4.40). As a result, solving these equations gives us a non-trivial solution,
where we have ignored the isotropic fixed points corresponding to \(X=0\). It is noted that two types of isotropic fixed points, which have been found in Ref. [83], can be easily derived from the above dynamical system. Indeed, by setting \(Y_1 \ne 0\), \(W_1 \ne 0\), and \(Y_2=W_2=U_1=U_2=Z_1=Z_2=0\) we can obtain the corresponding isotropic slow-roll inflation; while \(Y_1 \ne 0\), \(W_1 \ne 0\), and \(W_2=U_1=U_2=Z_1=Z_2=0\) but \(Y_2 \ne 0\) will lead to the corresponding isotropic hyperbolic inflation. Interestingly, one more isotropic fixed point can also be figured out in the present model, which corresponds to \(U_2=Z_1=Z_2=0\) along with \(Y_1 \ne 0\), \(Y_2 \ne 0\), \(W_1\ne 0\), \(W_2 \ne 0\), and \(U_1 \ne 0\). In fact, it is a generalised isotropic hyperbolic inflation with
In addition to the above anisotropic fixed point, it should be noted that another anisotropic fixed point with \(X \ne 0\), which is nothing but the anisotropic slow-roll inflation [54, 83], can be derived in this paper by setting \(Y_2=W_2=U_1=U_2=Z_2=0\). However, it will not be our current interest because of the fact that it is not equivalent to the anisotropic power-law solution found in the previous section. One can now ask if the anisotropic fixed point shown in Eqs. (4.41), (4.42), and (4.43) is equivalent to the anisotropic power-law found in the previous section. In order to answer this question, we will rewrite X, \(Y_1\), and \(Z^2\) as
with the help of useful relations,
here \(u_0\) has been defined in Eq. (3.13). Now, it is clear that this anisotropic fixed point is absolutely equivalent to the anisotropic power-law solution found above. Indeed, one can easily check that \(X = \eta /\zeta \) with \(\zeta \) and \(\eta \) have been shown in Eqs. (3.34) and (3.35), respectively. As a result, the anisotropic fixed point can be approximated during the inflationary phase with \(\rho \gg \lambda \), \(|m|\gg |n|\), and \(\kappa _1 \gg 1\) as
here we have assumed that \(u_0 \sim {{{\mathcal {O}}}}(1)\). It appears that \(Z^2 \ll 1\) implies that \(Z_1 \ll 1\) along with \(Z_2 \ll 1\). Additionally, the result \(W_1^2+W_2^2 \simeq 3\) indicates that \(0<W_1, ~W_2 <\sqrt{3}\). Next, we will investigate the stability of the obtained anisotropic fixed point, similar to our previous paper [82]. In particular, we will perturb the dynamical system around the fixed point as follows
Taking exponential perturbations [82],
we are able to write the above perturbed equations as a homogeneous linear system of \(A_i\) with \(i=1-9\). Furthermore, this system can be written as a homogeneous matrix equation as follows
where the matrix \({{{\mathcal {M}}}}\) is given by
Mathematically, this homogeneous linear system will admit non-trivial solutions, i.e., there is at least one non-vanishing solution \(A_i \ne 0\), if and only if
As a result, this equation can be written as an equation of \(\tau \) as
where the coefficients, \(a_i\) (\(i=0-4\)), are given by
thanks to the approximations of the anisotropic fixed points. Here, we have only kept the leading terms of the coefficients \(a_i\) (\(i=0-2\)) due to a set of the corresponding constraints for the anisotropic inflationary solution, \(\rho \gg \lambda \) and \(|m| \gg |n|\) as well as \(\lambda>0, ~\rho >0\) and \(n<0, ~m <0\), for simplicity. It turns out that besides five non-positive roots, \(\tau _{1,2,3}=0\), \(\tau _4=-3<0\), and \(\tau _5 =2/m <0\), four other non-trivial roots of Eq. (4.67) are derived from the equation
It turns out that if \(\omega =+1 >0\) then all coefficients \(a_i\) (\(i=0-4\)) become negative provided that \(u_0>0\). Mathematically, Eq. (4.73) with all negative coefficients \(a_i\) (\(i=0-4\)) no longer admits any positive roots \(\tau >0\), meaning that the corresponding anisotropic power-law hyperbolic inflationary solution is indeed stable against field perturbations. However, if \(\omega =-1 <0\), i.e., \(\psi \) is the phantom-like scalar field, then \(a_4 >0\) while \(a_0 <0\). Consequently, Eq. (4.73) will admit at least one positive root \(\tau >0\). This fact can be easily verified by an observation that the curve \({{{\mathcal {F}}}}(\tau )\) with \({{{\mathcal {F}}}}(0)=a_4 <0\) and \({{{\mathcal {F}}}} (\tau \gg 1) \sim a_4\tau ^4 >0\) will cross the positive horizontal \(\tau \)-axis at least one time at \(\tau =\tau _*>0 \). The existence of positive \(\tau _*\) implies that the corresponding anisotropic power-law hyperbolic inflationary solution is indeed unstable. This result is consistent with our previous models [67, 68, 82], in which the phantom field has been shown to favor the cosmic no-hair conjecture by causing unstable mode(s) to the corresponding anisotropic power-law inflationary solutions.

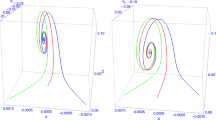
Attractor behavior of the anisotropic fixed point with \(\omega =+1\), \(u_0=2\), \(\lambda =0.1\), \(\rho =50\), \(n=-0.2\), and \(m=-100\). These two plots clearly show that three different trajectories corresponding to different initial conditions all tend to converge to the anisotropic fixed point
It should be noted that, we are able to numerically show the attractor property of the anisotropic fixed point with \(\omega =+1\) (see Fig. 1 for details). This result acts as a strong confirmation of the stability of the anisotropic power-law hyperbolic inflationary solution. It should be noted that if the angular field \(\psi \) is the phantom-like scalar field, i.e., \(\omega =-1\), the corresponding anisotropic fixed point will be unattractive as expected since all trajectories tend to converge to the isotropic fixed point corresponding to \(X=Z=0\). These results are also consistent with our previous study [82].
5 Conclusions
Motivated by a recent paper [83], we have proposed a hyperbolic generalization of our recent model, which acts as a novel multifield extension of the KSW model [82]. In this generalization, the field space of two scalar fields are assumed to be a hyperbolic space instead of a conventional flat space [102]. One of the scalar fields, \(\phi \), is the radial field and the other, \(\psi \), is the angular field. Both of them are massive and coupled to vector fields. As a result, we have obtained a set of Bianchi type I power-law solutions to this model in the regime \(\phi \gg L\), similar to Ref. [83]. Furthermore, we have shown that this solution can be used to present an anisotropic inflationary solution if \(\rho \gg \lambda \) along with \(|m| \gg |n|\), provided that both \(\lambda \) and \(\rho \) are positive, while both n and m are negative. Stability analysis based on the dynamical system method has been performed to verify that this anisotropic inflationary solution is indeed stable and attractive, similar to the solutions obtained in the non-hyperbolic (flat) model [82]. However, if the angular field, \(\psi \), is the phantom-like one with \(\omega =-1\), the corresponding anisotropic inflationary solution will be unstable as expected. It should be noted that this present paper is solely devoted to seek anisotropic inflationary solutions and investigate their stability in order to deal with the cosmic no-hair conjecture. Detailed investigations on the CMB imprints [87,88,89,90,91,92,93,94,95] of this model will be presented elsewhere. We hope that our present paper would be useful to studies of the early time universe.
Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: All data generated or analysed during this study are included in this published article.].
References
A.A. Starobinsky, A new type of isotropic cosmological models without singularity. Phys. Lett. B 91, 99 (1980)
A.H. Guth, The inflationary universe: a possible solution to the horizon and flatness problems. Phys. Rev. D 23, 347 (1981)
A.D. Linde, A new inflationary universe scenario: a possible solution of the horizon, flatness, homogeneity, isotropy and primordial monopole problems. Phys. Lett. B 108, 389 (1982)
A.D. Linde, Chaotic inflation. Phys. Lett. B 129, 177 (1983)
G. Hinshaw [WMAP Collaboration] et al., Nine-year Wilkinson microwave anisotropy probe (WMAP) observations: cosmological parameter results. Astrophys. J. Suppl. 208, 19 (2013). arXiv:1212.5226
N. Aghanim et al. [Planck Collaboration], Planck 2018 results. VI. Cosmological parameters, Astron. Astrophys. 641, A6 (2020). arXiv:1807.06209
Y. Akrami et al. [Planck Collaboration], Planck 2018 results. X. Constraints on inflation. Astron. Astrophys. 641, A10 (2020). arXiv:1807.06211
Y. Akrami et al. [Planck Collaboration], Planck 2018 results. VII. Isotropy and statistics of the CMB. Astron. Astrophys. 641, A7 (2020). arXiv:1906.02552
J. Martin, C. Ringeval, V. Vennin, Encyclopædia inflationaris. Phys. Dark Univ. 5–6, 75 (2014). arXiv:1303.3787
D. Saadeh, S.M. Feeney, A. Pontzen, H.V. Peiris, J.D. McEwen, How isotropic is the Universe?. Phys. Rev. Lett. 117, 131302 (2016). arXiv:1605.07178
J. Soltis, A. Farahi, D. Huterer, C.M. Liberato II, Percent-level test of isotropic expansion using type Ia supernovae. Phys. Rev. Lett. 122, 091301 (2019). arXiv:1902.07189
N.J. Secrest, S. von Hausegger, M. Rameez, R. Mohayaee, S. Sarkar, J. Colin, A test of the cosmological principle with quasars, Astrophys. J. Lett. 908, L51 (2021). arXiv:2009.14826
C. Krishnan, R. Mohayaee, E. Ó Colgáin, M.M. Sheikh-Jabbari, L. Yin, Hints of FLRW breakdown from supernovae. arXiv:2106.02532
T. Buchert, A.A. Coley, H. Kleinert, B.F. Roukema, D.L. Wiltshire, Observational challenges for the standard FLRW model. Int. J. Mod. Phys. D 25, 1630007 (2016). arXiv:1512.03313
D.J. Schwarz, C.J. Copi, D. Huterer, G.D. Starkman, CMB anomalies after planck. Class. Quantum Gravity 33, 184001 (2016). arXiv:1510.07929
D. Hanson, A. Lewis, A. Challinor, Asymmetric beams and CMB statistical anisotropy. Phys. Rev. D 81, 103003 (2010). arXiv:1003.0198
D. Hanson, A. Lewis, Estimators for CMB statistical anisotropy. Phys. Rev. D 80, 063004 (2009). arXiv:0908.0963
C.L. Bennett et al. [WMAP Collaboration], Nine-year Wilkinson Microwave Anisotropy Probe (WMAP) observations: final maps and results. Astrophys. J. Suppl. 208, 20 (2013). arXiv:1212.5225
N.E. Groeneboom, L. Ackerman, I.K. Wehus, H.K. Eriksen, Bayesian analysis of an anisotropic universe model: systematics and polarization. Astrophys. J. 722, 452 (2010). arXiv:0911.0150
C. Pitrou, T.S. Pereira, J.P. Uzan, Predictions from an anisotropic inflationary era. J. Cosmol. Astropart. Phys. 04, 004 (2008). arXiv:0801.3596
A.E. Gumrukcuoglu, C.R. Contaldi, M. Peloso, Inflationary perturbations in anisotropic backgrounds and their imprint on the CMB. J. Cosmol. Astropart. Phys. 07, 005 (2007). arXiv:0707.4179
C. Krishnan, R. Mohayaee, E. Ó. Colgáin, M.M. Sheikh-Jabbari, L. Yin, Does Hubble tension signal a breakdown in FLRW cosmology?. Class. Quantum Gravity 38, 184001 (2021). arXiv:2105.09790
J. Colin, R. Mohayaee, M. Rameez, S. Sarkar, Evidence for anisotropy of cosmic acceleration. Astron. Astrophys. 631, L13 (2019). arXiv:1808.04597
G.W. Gibbons, S.W. Hawking, Cosmological event horizons, thermodynamics, and particle creation. Phys. Rev. D 15, 2738 (1977)
S.W. Hawking, I.G. Moss, Supercooled phase transitions in the very early universe. Phys. Lett. B 110, 35 (1982)
R.M. Wald, Asymptotic behavior of homogeneous cosmological models in the presence of a positive cosmological constant. Phys. Rev. D 28, 2118 (1983)
J.D. Barrow, Cosmic no hair theorems and inflation. Phys. Lett. B 187, 12 (1987)
M. Mijic, J.A. Stein-Schabes, A no-hair theorem for \(R^{2}\) models. Phys. Lett. B 203, 353 (1988)
Y. Kitada, K.I. Maeda, Cosmic no hair theorem in power law inflation. Phys. Rev. D 45, 1416 (1992)
M. Kleban, L. Senatore, Inhomogeneous anisotropic cosmology. J. Cosmol. Astropart. Phys. 10, 022 (2016). arXiv:1602.03520
W.E. East, M. Kleban, A. Linde, L. Senatore, Beginning inflation in an inhomogeneous universe. J. Cosmol. Astropart. Phys. 09, 010 (2016). arXiv:1511.05143
S.M. Carroll, A. Chatwin-Davies, Cosmic equilibration: a holographic no-hair theorem from the generalized second law. Phys. Rev. D 97, 046012 (2018). arXiv:1703.09241
G.F.R. Ellis, M.A.H. MacCallum, A class of homogeneous cosmological models. Commun. Math. Phys. 12, 108 (1969)
G.F.R. Ellis, The Bianchi models: then and now. Gen. Relativ. Gravit. 38, 1003 (2006)
A.A. Starobinsky, Isotropization of arbitrary cosmological expansion given an effective cosmological constant. JETP Lett. 37, 66 (1983)
V. Muller, H.J. Schmidt, A.A. Starobinsky, Power law inflation as an attractor solution for inhomogeneous cosmological models. Class. Quantum Gravity 7, 1163 (1990)
J.D. Barrow, J. Stein-Schabes, Inhomogeneous cosmologies with cosmological constant. Phys. Lett. A 103, 315 (1984)
L.G. Jensen, J.A. Stein-Schabes, Is inflation natural? Phys. Rev. D 35, 1146 (1987)
J.A. Stein-Schabes, Inflation in spherically symmetric inhomogeneous models. Phys. Rev. D 35, 2345 (1987)
J.D. Barrow, S. Hervik, Anisotropically inflating universes. Phys. Rev. D 73, 023007 (2006). arXiv:gr-qc/0511127
J.D. Barrow, S. Hervik, On the evolution of universes in quadratic theories of gravity. Phys. Rev. D 74, 124017 (2006). arXiv:gr-qc/0610013
J.D. Barrow, S. Hervik, Simple types of anisotropic inflation. Phys. Rev. D 81, 023513 (2010). arXiv:0911.3805
J. Middleton, On the existence of anisotropic cosmological models in higher order theories of gravity. Class. Quantum Gravity 27, 225013 (2010). arXiv:1007.4669
D. Muller, A. Ricciardone, A.A. Starobinsky, A. Toporensky, Anisotropic cosmological solutions in \(R + R^2\) gravity. Eur. Phys. J. C 78, 311 (2018). arXiv:1710.08753
N. Kaloper, Lorentz Chern–Simons terms in Bianchi cosmologies and the cosmic no hair conjecture. Phys. Rev. D 44, 2380 (1991)
H.W.H. Tahara, S. Nishi, T. Kobayashi, J. Yokoyama, Self-anisotropizing inflationary universe in Horndeski theory and beyond. J. Cosmol. Astropart. Phys. 07, 058 (2018). arXiv:1805.00186
A.A. Starobinsky, S.V. Sushkov, M.S. Volkov, Anisotropy screening in Horndeski cosmologies. Phys. Rev. D 101, 064039 (2020). arXiv:1912.12320
R. Galeev, R. Muharlyamov, A.A. Starobinsky, S.V. Sushkov, M.S. Volkov, Anisotropic cosmological models in Horndeski gravity. Phys. Rev. D 103, 104015 (2021). arXiv:2102.10981
W.F. Kao, I.C. Lin, Stability conditions for the Bianchi type II anisotropically inflating universes. J. Cosmol. Astropart. Phys. 01, 022 (2009)
W.F. Kao, I.C. Lin, Anisotropically inflating universes in a scalar-tensor theory. Phys. Rev. D 79, 043001 (2009)
W.F. Kao, I.C. Lin, Stability of the anisotropically inflating Bianchi type VI expanding solutions. Phys. Rev. D 83, 063004 (2011)
C. Chang, W.F. Kao, I.C. Lin, Stability analysis of the Lorentz Chern–Simons expanding solutions. Phys. Rev. D 84, 063014 (2011)
M. a. Watanabe, S. Kanno, J. Soda, Inflationary universe with anisotropic hair. Phys. Rev. Lett. 102, 191302 (2009). arXiv:0902.2833
S. Kanno, J. Soda, M.A. Watanabe, Anisotropic power-law inflation. J. Cosmol. Astropart. Phys. 12, 024 (2010). arXiv:1010.5307
R. Emami, H. Firouzjahi, S.M. Sadegh Movahed, M. Zarei, Anisotropic inflation from charged scalar fields. J. Cosmol. Astropart. Phys. 02, 005 (2011). arXiv:1010.5495
K. Murata, J. Soda, Anisotropic inflation with non-Abelian gauge kinetic function. J. Cosmol. Astropart. Phys. 06, 037 (2011). arXiv:1103.6164
S. Hervik, D.F. Mota, M. Thorsrud, Inflation with stable anisotropic hair: is it cosmologically viable? J. High Energy Phys. 11, 146 (2011). arXiv:1109.3456
M. Thorsrud, D.F. Mota, S. Hervik, Cosmology of a scalar field coupled to matter and an isotropy-violating Maxwell field. J. High Energy Phys. 10, 066 (2012). arXiv:1205.6261
A.A. Abolhasani, M. Akhshik, R. Emami, H. Firouzjahi, Primordial statistical anisotropies: the effective field theory approach. J. Cosmol. Astropart. Phys. 03, 020 (2016). arXiv:1511.03218
S. Lahiri, Anisotropic inflation in Gauss–Bonnet gravity. J. Cosmol. Astropart. Phys. 09, 025 (2016). arXiv:1605.09247
J. Holland, S. Kanno, I. Zavala, Anisotropic inflation with derivative couplings. Phys. Rev. D 97, 103534 (2018). arXiv:1711.07450
T.Q. Do, W.F. Kao, Anisotropic power-law inflation for a conformal-violating Maxwell model. Eur. Phys. J. C 78, 360 (2018). arXiv:1712.03755
T.Q. Do, W.F. Kao, Anisotropic power-law inflation of the five dimensional scalar-vector and scalar-Kalb–Ramond model. Eur. Phys. J. C 78, 531 (2018)
F. Cicciarella, J. Mabillard, M. Pieroni, A. Ricciardone, A Hamilton–Jacobi formulation of anisotropic inflation. J. Cosmol. Astropart. Phys. 09, 044 (2019). arXiv:1903.11154
P. Gao, K. Takahashi, A. Ito, J. Soda, Cosmic no-hair conjecture and inflation with an SU(3) gauge field. Phys. Rev. D 104, 103526 (2021). arXiv:2107.00264
D.H. Nguyen, T.M. Pham, T.Q. Do, Anisotropic constant-roll inflation for the Dirac–Born–Infeld model. Eur. Phys. J. C 81, 839 (2021). arXiv:2107.14115
T.Q. Do, W.F. Kao, I.C. Lin, Anisotropic power-law inflation for a two scalar fields model. Phys. Rev. D 83, 123002 (2011)
T.Q. Do, S.H.Q. Nguyen, Anisotropic power-law inflation in a two-scalar-field model with a mixed kinetic term. Int. J. Mod. Phys. D 26, 1750072 (2017). arXiv:1702.08308
T. Fujita, I. Obata, T. Tanaka, S. Yokoyama, Statistically anisotropic tensor modes from inflation. J. Cosmol. Astropart. Phys. 07, 023 (2018). arXiv:1801.02778
I. Obata, T. Fujita, Footprint of two-form field: statistical anisotropy in primordial gravitational waves. Phys. Rev. D 99, 023513 (2019). arXiv:1808.00548
T. Hiramatsu, K. Murai, I. Obata, S. Yokoyama, Statistically-anisotropic tensor bispectrum from inflation. J. Cosmol. Astropart. Phys. 03, 047 (2021). arXiv:2008.03233
K. Yamamoto, M.A. Watanabe, J. Soda, Inflation with multi-vector hair: the fate of anisotropy. Class. Quantum Gravity 29, 145008 (2012). arXiv:1201.5309
K. Yamamoto, Primordial fluctuations from inflation with a triad of background gauge fields. Phys. Rev. D 85, 123504 (2012). arXiv:1203.1071
H. Funakoshi, K. Yamamoto, Primordial bispectrum from inflation with background gauge fields. Class. Quantum Gravity 30, 135002 (2013). arXiv:1212.2615
M.A. Gorji, S.A. Hosseini Mansoori, H. Firouzjahi, Inflation with multiple vector fields and non-Gaussianities. J. Cosmol. Astropart. Phys. 11, 041 (2020). arXiv:2008.08195
H. Firouzjahi, M.A. Gorji, S.A. Hosseini Mansoori, A. Karami, T. Rostami, Charged vector inflation. Phys. Rev. D 100, 043530 (2019). arXiv:1812.07464
J. Ohashi, J. Soda, S. Tsujikawa, Anisotropic power-law k-inflation. Phys. Rev. D 88, 103517 (2013). arXiv:1310.3053
T.Q. Do, W.F. Kao, Anisotropic power-law inflation for the Dirac–Born–Infeld theory. Phys. Rev. D 84, 123009 (2011)
T.Q. Do, W.F. Kao, Anisotropic power-law solutions for a supersymmetry Dirac–Born–Infeld theory. Class. Quantum Gravity 33, 085009 (2016)
T.Q. Do, W.F. Kao, Bianchi type I anisotropic power-law solutions for the Galileon models. Phys. Rev. D 96, 023529 (2017)
T.Q. Do, Stable small spatial hairs in a power-law k-inflation model. Eur. Phys. J. C 81, 77 (2021). arXiv:2007.04867
T.Q. Do, W.F. Kao, Anisotropic power-law inflation for a model of two scalar and two vector fields. Eur. Phys. J. C 81, 525 (2021). arXiv:2104.14100
C.B. Chen, J. Soda, Anisotropic hyperbolic inflation. J. Cosmol. Astropart. Phys. 09, 026 (2021). arXiv:2106.04813
J. Kim, E. Komatsu, Limits on anisotropic inflation from the Planck data. Phys. Rev. D 88, 101301(R) (2013). arXiv:1310.1605
S.R. Ramazanov, G. Rubtsov, Constraining anisotropic models of the early Universe with WMAP9 data. Phys. Rev. D 89, 043517 (2014). arXiv:1311.3272
S. Ramazanov, G. Rubtsov, M. Thorsrud, F.R. Urban, General quadrupolar statistical anisotropy: Planck limits. J. Cosmol. Astropart. Phys. 03, 039 (2017). arXiv:1612.02347
L. Ackerman, S.M. Carroll, M.B. Wise, Imprints of a primordial preferred direction on the microwave background. Phys. Rev. D 75, 083502 (2007). arXiv:astro-ph/0701357 [Erratum: Phys. Rev. D 80, 069901(E) (2009)]
T.R. Dulaney, M.I. Gresham, Primordial power spectra from anisotropic inflation. Phys. Rev. D 81, 103532 (2010). arXiv:1001.2301
A.E. Gumrukcuoglu, B. Himmetoglu, M. Peloso, Scalar-scalar, scalar-tensor, and tensor-tensor correlators from anisotropic inflation. Phys. Rev. D 81, 163528 (2010). arXiv:1001.4088
N. Bartolo, S. Matarrese, M. Peloso, A. Ricciardone, Anisotropic power spectrum and bispectrum in the \(f(\phi )F^2\) mechanism. Phys. Rev. D 87, 023504 (2013). arXiv:1210.3257
M.A. Watanabe, S. Kanno, J. Soda, The nature of primordial fluctuations from anisotropic inflation. Prog. Theor. Phys. 123, 1041 (2010). arXiv:1003.0056
M.A. Watanabe, S. Kanno, J. Soda, Imprints of anisotropic inflation on the cosmic microwave background. Mon. Not. R. Astron. Soc. 412, L83 (2011). arXiv:1011.3604
J. Ohashi, J. Soda, S. Tsujikawa, Observational signatures of anisotropic inflationary models. J. Cosmol. Astropart. Phys. 12, 009 (2013). arXiv:1308.4488
X. Chen, R. Emami, H. Firouzjahi, Y. Wang, The TT, TB, EB and BB correlations in anisotropic inflation. J. Cosmol. Astropart. Phys. 08, 027 (2014). arXiv:1404.4083
T.Q. Do, W.F. Kao, I.C. Lin, CMB imprints of non-canonical anisotropic inflation. Eur. Phys. J. C 81, 390 (2021). arXiv:2003.04266
R. Emami, H. Firouzjahi, Clustering fossil from primordial gravitational waves in anisotropic inflation. J. Cosmol. Astropart. Phys. 10, 043 (2015). arXiv:1506.00958
A. Ito, J. Soda, MHz gravitational waves from short-term anisotropic inflation. J. Cosmol. Astropart. Phys. 04, 035 (2016). arXiv:1603.00602
A. Maleknejad, M.M. Sheikh-Jabbari, J. Soda, Gauge fields and inflation. Phys. Rep. 528, 161 (2013). arXiv:1212.2921
J. Soda, Statistical anisotropy from anisotropic inflation. Class. Quantum Gravity 29, 083001 (2012). arXiv:1201.6434
M.S. Turner, L.M. Widrow, Inflation produced, large scale magnetic fields. Phys. Rev. D 37, 2743 (1988)
B. Ratra, Cosmological “seed” magnetic field from inflation. Astrophys. J. Lett. 391, L1 (1992)
A.R. Brown, Hyperbolic inflation. Phys. Rev. Lett. 121, 251601 (2018). arXiv:1705.03023
D.A. Easson, R. Gregory, D.F. Mota, G. Tasinato, I. Zavala, Spinflation. J. Cosmol. Astropart. Phys. 02, 010 (2008). arXiv:0709.2666
S. Mizuno, S. Mukohyama, Primordial perturbations from inflation with a hyperbolic field-space. Phys. Rev. D 96, 103533 (2017). arXiv:1707.05125
T. Bjorkmo, M.C.D. Marsh, Hyperinflation generalised: from its attractor mechanism to its tension with the ‘swampland conditions’. J. High Energy Phys. 04, 172 (2019). arXiv:1901.08603
M. Bounakis, I.G. Moss, G. Rigopoulos, Observational constraints on hyperinflation. J. Cosmol. Astropart. Phys. 02, 006 (2021). arXiv:2010.06461
R.R. Caldwell, A phantom menace? Cosmological consequences of a dark energy component with super-negative equation of state. Phys. Lett. B 545, 23 (2002). arXiv:astro-ph/9908168
Z.K. Guo, Y.S. Piao, X.M. Zhang, Y.Z. Zhang, Cosmological evolution of a quintom model of dark energy. Phys. Lett. B 608, 177 (2005). arXiv:astro-ph/0410654
L.P. Chimento, M.I. Forte, R. Lazkoz, M.G. Richarte, Internal space structure generalization of the quintom cosmological scenario. Phys. Rev. D 79, 043502 (2009). arXiv:0811.3643
I.Y. Aref’eva, N.V. Bulatov, S.Y. Vernov, Stable exact solutions in cosmological models with two scalar fields. Theor. Math. Phys. 163, 788 (2010). arXiv:0911.5105
Y.F. Cai, E.N. Saridakis, M.R. Setare, J.Q. Xia, Quintom cosmology: theoretical implications and observations. Phys. Rep. 493, 1 (2010). arXiv:0909.2776
L.F. Abbott, M.B. Wise, Constraints on generalized inflationary cosmologies. Nucl. Phys. B 244, 541 (1984)
F. Lucchin, S. Matarrese, Power law inflation. Phys. Rev. D 32, 1316 (1985)
S. Bahamonde, C.G. Böhmer, S. Carloni, E.J. Copeland, W. Fang, N. Tamanini, Dynamical systems applied to cosmology: dark energy and modified gravity. Phys. Rep. 775-777, 1 (2018). arXiv:1712.03107
Acknowledgements
We would like to thank the referee very much for useful comments and suggestions. T.Q.D. is supported by the Vietnam National Foundation for Science and Technology Development (NAFOSTED) under grant number 103.01-2020.15. W.F.K. is supported in part by the Ministry of Science and Technology (MOST) of Taiwan under Contract No. MOST 110-2112-M-A49-007.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Funded by SCOAP3
About this article

Cite this article
Do, T.Q., Kao, W.F. Anisotropic hyperbolic inflation for a model of two scalar and two vector fields. Eur. Phys. J. C 82, 123 (2022). https://doi.org/10.1140/epjc/s10052-022-10078-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-022-10078-6