
Abstract
We consider a nonlinear control system with a bang-bang hysteresis control, which is a simplified model of a thermal energy harvester. We obtain conditions on the controller and the system parameters guaranteeing the existence of a periodic mode in the system.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
INTRODUCTION
The paper [1] dealt with the nonlinear control system
on the half-line \(t\geq 0\) with the initial conditions
and the bang-bang hysteresis feedback control (Fig. 1)
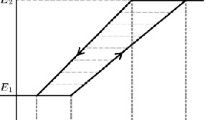
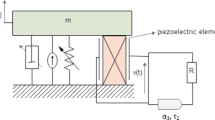
System (1) is a simplified model of a thermal energy harvester [2], where the following notation is used: \(y\) is an output variable characterizing the strain of a shape memory material [3] with \(0<y_0<\Delta \); \(T \) is the material temperature with \(T_0\geq 0 \); the positive numbers \(m \), \(\beta \), \(k \), \(\alpha \), \(l \), \(\Delta \), and \(\gamma \) are physical parameters of the thermal energy harvester; \(g \) is the acceleration due to gravity; \(u \) is an output feedback control (\(u=u(y) \)); and \(E \) is the material Young modulus, which is described by a nonlinear characteristic with hysteresis and saturation (see Fig. 2).

Bang-bang feedback control.

Possible characteristic \(E(T) \) with hysteresis.
The mapping \(E(T) \) can be viewed as a set-valued mapping \(E:\overline {\mathbb {R}}_{+}\to \overline {\mathbb {R}}_{+} \),
Here \(A_1\), \(A_2 \), \(M_1\), \(M_2 \), \(E_1\), and \(E_2 \) are positive constants determined by the physical properties of the shape memory material. In what follows, we assume that these constants are related by the inequalities
Note that, given a specific continuous function \(T(t) \), a single-valued branch of \(E(T) \) is selected, which is a continuous function ranging in the interval \( [E_1,E_2]\) (see [1]).
We assume that the threshold values \(y_1 \) and \(y_2 \) characterizing the control (3) satisfy the condition \(0<y_1<y_2<\Delta \).
Efficiently verifiable conditions on the coefficients and initial values of the state variables in system (1), (2) and on the parameters of the controller (3) ensuring the onset of oscillatory motions [4, pp. 10] in the closed-loop system were obtained in [1], where the following definition of oscillatory motion (oscillatory mode) was used. A solution of system (1), (2), that is, a pair of functions \( (y(t),T(t))\) satisfying the system and the initial conditions with the control \(u\) given by (3) is called an oscillatory mode if there exist positive constants (mode parameters) \(t^*_1\), \(t^*_2 \), \(\underline {y}\), and \(\overline {y} \) (where \(0<t^*_1<t^*_2 \) and \(0<\underline {y}<\overline {y}<\Delta \)) such that the following conditions are satisfied:
-
1.
There exists a \(t\geq 0\) such that \(y(t)=\overline {y}\).
-
2.
For each \(t \) such that \(y(t)=\overline {y} \), there exists a \(\xi \in [t+t^*_1,t+t^*_2] \) such that \(y(\xi )=\underline {y} \) and \(y(\tau )\ne \underline {y} \) for all \(\tau \in ({t,t+t^*_1}) \).
-
3.
For each \(t \) such that \(y(t)=\underline {y} \), there exists a \(\xi \in [t+t^*_1,t+t^*_2] \) such that \(y(\xi )=\overline {y} \) and \(y(\tau )\ne \overline {y} \) for all \(\tau \in ({t,t+t^*_1}) \).
An analysis of the results in [1] shows that the problem of finding conditions on the parameters of the closed-loop system (1)–(3) guaranteeing the existence of oscillatory modes turns out to be very difficult. However, from the viewpoint of applications, the problem of determining conditions for the existence of a periodic mode in the closed-loop system is more important.
In the present paper, based on the results in [1], we obtain sufficient conditions for the existence of a periodic mode in the closed-loop system (1)–(3).
1. STATEMENT OF THE PROBLEM
We write system (1), (2) in the normal Cauchy form
where \(x_1=y\), \(x_2=\dot y \), \(x_3=T\), \(0<y_0<\Delta \), and \(T_0\geq 0 \).
The corresponding closed-loop system with the controller (3) for \(t\geq 0\) has the form
where \(0<y_0<\Delta \) and \(T_0\geq 0 \); we assume that \(y_0<y_1 \) and \(T_0<M_1 \). We write the closed-loop system (5) in the vector form
Now we say that the system
is active if the bang-bang relay output is \(\overline {u} \) and the system
is active if the bang-bang relay output is \(\underline {u} \).
Then the solution of the closed-loop system (5) with the initial conditions \(x(0)=(y_0,0,T_0)^{\mathrm {T}} \), \(y_0<y_1\), is sought in the class of continuous vector functions \(x(t)\) in accordance with the following algorithm of active mode alternation:
Here the solutions of systems (6) and (7) are matched by continuity at the points of discontinuity of the right-hand side of the system (on the hyperplanes \( x_1=y_1\) and \(x_1=y_2 \)). In what follows, a function \(f \) defined on the half-line \(t\ge 0 \) is said to be \(\Theta \)-periodic if \(f(t+\Theta )=f(t)\) for all \(t\ge 0 \).
Now let us state a control problem for system (4).
Problem.
Find constraints on the number parameters \(m\), \(k \), \(\alpha \), \(l \), \(\beta \), \(\Delta \), and \(\gamma \) of system (4) as well as on the parameters \(y_1 \), \(y_2\), \(\underline {u} \), and \(\overline {u} \) of the controller (3) under which there exists a periodic solution (periodic mode) in the closed-loop system (5).
2. PERIODIC MODE IN SYSTEM WITH PROGRAMMED CONTROL
We divide the solution of the problem about the existence of a periodic solution in system (5) into several steps. First, we study the existence of a periodic solution of system (4) with the programmed control
Here \(\overline {u} \), \(\underline {u}\), \(\Theta _1 \), and \(\Theta \) are positive parameters of the programmed control.
Now consider the problem of finding control parameter values ensuring the existence of a periodic solution of the closed-loop system (4), (9).
First, note that this control \(u(t)\) is a piecewise constant \(\Theta \)-periodic function. Let us show that the equation
has a \(\Theta \)-periodic solution for any \(\overline {u} \), \(\underline {u}\), and \(\Theta >\Theta _1>0\). Indeed, the Cauchy formula
holds for the solutions of Eq. (10) for any \(t\geq s\geq 0\). Let \(x_3(0)=T_0 \). Since \(u_p(t)\equiv \overline {u} \) on the interval \([0,\Theta _1) \), it follows from (11) that
Further, since \(u_p(t)\equiv \underline {u} \) on the interval \([\Theta _1,\Theta ) \), we obtain
In view of the \(\Theta \)-periodicity of the function \( u_p(t)\), we conclude that the solution \(x_3(t) \) is \(\Theta \)-periodic if and only if \(x_3(\Theta )=T_0 \). Then we find the initial condition for the \(\Theta \)-periodic solution \(x^{\Theta }_3(t) \) from the representation (13),
It follows from (13) and (14) that
Now we set \(\overline {T}=x^{\Theta }_3(\Theta _1) \) and \(\hat \gamma =\gamma /\alpha \) and write the \(\Theta \)-periodic solution of Eq. (10) in closed form,
Now assume that the parameters \(\overline {u} \), \(\underline {u} \), \(\Theta _1 \), and \(\Theta \) of the controller (9) have been chosen so that
Assuming that the component \(x_3\) of the solution of the closed-loop system (4), (9) satisfies the initial condition \(x_3(0)=\underline {T} \), consider the subsystem
where \(\varphi (t)=E(x_3^{\Theta }(t))\). By virtue of conditions (15) and the fact that \(x_3^{\Theta }(t) \) is a \(\Theta \)-periodic solution of Eq. (10), the function \(\varphi (t) \) will be \(\Theta \)-periodic as well, and we can write
where
and the inequality \( T_0<M_1\) has been taken into account.
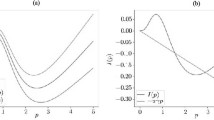
Figures 3 and 4 schematically depict the graphs of the functions \(x_3^{\Theta }(t)\) and \(\varphi (t) \) for \(t\in [0,\Theta ] \).

Graph of the function \( x_3^{\Theta }(t)\).

Graph of the function \(\varphi (t)\) .
It follows from the preceding that system (16) is actually a linear time-varying system of the form
where \( x=(x_1,x_2)^{\mathrm {T}}\) and
the matrix \(A(t) \) and the column vector \(f(t) \) being continuous \(\Theta \)-periodic functions; i.e., in particular, \(A(t+\Theta )=A(t)\) and \(f(t+\Theta )=f(t) \) for each \(t\geq 0 \).
It is well known [5, p. 215] that if the linear homogeneous \(\Theta \)-periodic system
does not have a nontrivial \(\Theta \)-periodic solution, then the corresponding inhomogeneous system (18) has a unique \(\Theta \)-periodic solution. Now note that if the homogeneous system (20) is asymptotically stable, then it cannot have a nontrivial \(\Theta \)-periodic solution.
Let us obtain conditions under which the linear homogeneous system (20) is asymptotically stable. To this end, we use the method proposed in [5, p. 197]. Consider system (20) with coefficient matrix \(A(t) \) given by (19). This system is equivalent to the second-order differential equation
where \(y(t)=x_1(t)\), \(\dot y(t)=x_2(t)\), and
Let us make the standard change of dependent variable \(y=e^{-a t/2} z \) in Eq. (21); then
Therefore, this change of variable reduces Eq. (21) to the form
where
According to the results in the monograph [5, p. 202], if the \(\Theta \)-periodic function \(p(t) \) satisfies the inequalities
then all solutions \(z(t) \) of Eq. (22) are bounded together with their first derivatives. However, the boundedness of \(z(t)\) and \(\dot z(t) \) implies that the solutions \(y(t) \) of Eq. (21), together with their derivatives \(\dot y(t) \), tend to zero, and consequently, system (20) is asymptotically stable. Since \(E_1\!\leq \!\varphi (t)\!\leq \!E_2\), we obtain a sufficient condition for system (20) with coefficient matrix \(A(t) \) given by (19) to be asymptotically stable in the form
Consequently, the linear inhomogeneous system (18) has a unique \(\Theta \)-periodic solution under condition (23). We denote this solution by \(x^{\Theta }(t)=(x^{\Theta }_1(t), x^{\Theta }_2(t))^{\mathrm {T}}\).
Thus, we have proved the following assertion.
Theorem 1.
Let the parameters \( \overline {u}\), \( \underline {u}\), \( \Theta _1\), and \( \Theta \) of the programmed control (9) for system (4) satisfy the following conditions:
-
1.
One has the inequalities
$$ \begin {aligned} M_1&<\underline {T}=\frac {\underline {u}(1-e^{-\gamma (\Theta -\Theta _1)/\alpha })+ \overline {u}(1-e^{-\gamma \Theta _1/\alpha })e^{-\gamma (\Theta -\Theta _1)/\alpha } }{1-e^{-\gamma \Theta /\alpha }}, \\ A_2&>\overline {T}=\frac { \overline {u}(1-e^{-\gamma \Theta _1/\alpha })+ \underline {u}(1-e^{-\gamma (\Theta -\Theta _1)/\alpha })e^{-\gamma \Theta _1/\alpha } }{1-e^{-\gamma \Theta /\alpha }}. \end {aligned}$$ -
2.
Condition (23) holds.
Then there exists a unique periodic motion \(x^{\Theta }(t)=(x_1^{\Theta }(t),x_2^{\Theta }(t), x_3^{\Theta }(t))^{\mathrm {T}}\) in system (4) with the programmed control (9). Furthermore, \(x_3^{\Theta }(0)=\underline {T} \).
3. PERIODIC MODE IN THE SYSTEM WITH A FEEDBACK
Let us return to the original problem (see Sec. 2) of constructing a feedback control (3) ensuring the existence of a periodic mode in the closed-loop system (5). The main idea for solving this problem is to choose the parameters of the feedback (3) based on the results in the paper [1] guaranteeing the existence of an oscillatory mode in the closed-loop system (5) and also based on the programmed control (9) calculated in accordance with Theorem 1 and the periodic solution \(x^{\Theta }(t) \) produced by this control.
Thus, the following assertion holds based on Theorem 1 and sufficient conditions obtained in [1] for the existence of oscillatory modes.
Theorem 2.
Assume that
-
1.
The parameters of system (4) satisfy the inequality
$$ \Delta -\frac {mg+k\Delta }{k+\alpha E_1/l}>0.$$ -
2.
The spectrum of each of the matrices
$$ \begin {pmatrix} 0 & 1\\ -\dfrac {kl+\alpha E_1}{m} & - \dfrac {\beta }{m}\end {pmatrix},\quad \begin {pmatrix} 0 & 1\\ -\dfrac {kl+\alpha E_2}{m} &-\dfrac {\beta }{m}\end {pmatrix} $$lies on the negative half-axis and is simple.
-
3.
The parameters \(\overline {u} \) , \( \underline {u}\) , \( \Theta _1\) , and \( \Theta \) satisfy the conditions in Theorem 1 and, in addition,
$$ \underline {u}<M_1,\quad \overline {u}>A_2. $$ -
4.
The numbers \(y_1=x_1^{\Theta }(0) \) and \( y_2=x_1^{\Theta }(\Theta _1)\) satisfy the inequalities
$$ y_1>\Delta -\frac {mg+k\Delta }{k+\alpha E_1/l},\quad y_2<\Delta -\frac {mg+ k\Delta }{k+\alpha E_2/l}, $$where \( x^{\Theta }(t)=(x_1^{\Theta }(t), x_2^{\Theta }(t), x_3^{\Theta }(t))^{\mathrm {T}}\) is the periodic solution of system (4) supplemented by the programmed control (9) with parameters \( \overline {u}\), \( \underline {u}\), \( \Theta _1\), and \( \Theta \).
-
5.
The following inequalities hold for system (4) supplemented by the feedback (3) with parameters \( \overline {u}\), \( \underline {u}\), \(y_1 \), and \(y_2 \):
$$ \frac {E_2}{E_1}-\frac {\beta C_3^2}{\bar t_1^*}<1,\quad \biggl (\frac {m^2g^2}{k}+\frac {\alpha E_2}{l}\Delta ^2\biggr )\nu _0<k\biggl (\Delta +\frac {mg}{k}\biggr )^{\!2},$$where
$$ \begin {gathered} \bar t_1^*=\min \bigg \{\frac {1}{C_2\sqrt {2m}}, (y_2-y_1){\sqrt {\frac {E_1 m}{2 E_2 C_1}}}\bigg \}, \\ C_1=k\biggl (y_1+\frac {m g}{k}\biggr )^{\!2}+ \frac {\alpha }{l}E_2(y_1-\Delta )^2,\quad C_2=\frac {E_2}{mE_1}\biggl (\frac {\beta }{\sqrt {m}}+\sqrt {k}+ \sqrt {\frac {\alpha }{l} E_2}\biggr ), \\ C_3=\sqrt {\frac {E_1}{E_2(k+\alpha E_2/{l})}},\quad \nu _0=\max \{{H_{\max }}/{H_0}, 2\},\quad H_0=\frac {4mg\Delta E_1}{k+E_1}, \\ H_{\max }=\biggl (\frac {E_2}{E_1}\biggr )^{\!2}\bar H^*,\quad \bar H^*=\max \{H^*,\bar H\},\quad \bar H=\max \bigg \{\frac {m^2g^2}k+\frac {\alpha }l E_2\Delta ^2, k\biggl (\Delta +\frac {mg}k\biggr )^{\!2}\bigg \}, \\ H^*=\max \bigg \{\biggl (\frac {2\beta C_3 C_4 /\bar t_1^*}{1-E_2/E_1}+\beta C_3^2/\bar t_1^*\biggr )^{\!2},\frac {C_4^2}{C_3^2}\bigg \},\quad C_4=\frac {m g}{k}+\Delta +y_1; \end {gathered} $$ -
6.
The conditions
$$ 0<x_1^{\Theta }(t_0)<\zeta _{+},\quad x_2^{\Theta }(t_0)=0,\quad t_0<\Theta _{A_2}, $$are satisfied at time \(t_0 \) , where \( \zeta _{+}\) is the positive root of the quadratic trinomial
$$ p(\zeta )\equiv k\nu _0\biggl (\zeta +\frac {mg}k\biggr )^{\!2}+\frac {\alpha \nu _0 E_2}{l}(\zeta -\Delta )^2-k\biggl (\Delta +\frac {mg}k\biggr )^{\!2}.$$
Then the solution \( \tilde x(t)\) of the closed-loop system (5) with the initial conditions
is an oscillatory mode with the parameters \(t_1^*\), \(t_2^*\), \(y_1\), and \(y_2\), where
(An algorithm for calculating the constant \(t_2^* \) is rather awkward; it is presented in full in [1].) Further, the solution \( \tilde x(t)\) satisfies the identity \(\tilde x(t)\equiv x^{\Theta }(t+t_0) \) for \( t\in [0,t_1^*]\).
Now let us show that, under certain additional conditions on the constant \(t_1^* \), the oscillatory mode \(\tilde x(t) \) of system (5) with the initial conditions (24) is actually a periodic mode. To this end, it suffices to establish that if the parameters \(\overline {u}\), \(\underline {u} \), \(y_1 \), and \(y_2 \) of the bang-bang feedback control (3) satisfy the assumptions of Theorem 2, then, under the initial conditions (24), the control switches occur on the interval \([0,\Theta ] \) at \(t_1=\Theta _1-t_0 \) and \(t_2=\Theta -t_0 \).
Thus, let the assumptions of Theorem 2 be satisfied, and let the inequality
hold for \(t_1^* \). Since the solution \(\tilde x(t) \) of the closed-loop system (5) with the initial conditions (24) is oscillatory, we have the inequality
It follows by Theorem 2 that the identity \(\tilde x(t)\equiv x^{\Theta }(t+t_0)\) holds for \(t\in [0,\Theta _{A_2}-t_0] \).
Further, consider the behavior of the functions \(\tilde x_1(t) \) and \(\tilde x_2(t) \) on the interval \([\Theta _{A_2}-t_0,\Theta _1-t_0]\). First, note that, by the definition of the feedback (3), the identities \(\tilde x_1(t)\equiv x_1^{\Theta }(t+t_0)\) and \(\tilde x_2(t)\equiv x_2^{\Theta }(t+t_0)\) remain valid on the interval \([\Theta _{A_2}-t_0,\Theta _1-t_0]\) until time \(t_*\in [\Theta _{A_2}-t_0,\Theta _1-t_0]\) such that \(\tilde x_1(t_*)=x_1^{\Theta }(t_*+t_0)=y_2\). Let us show that \( x_1^{\Theta }(t+t_0)\ne y_2\) for \(t\in [\Theta _{A_2}-t_0,\Theta _1-t_0)\). Since \(\varphi (t+t_0)\equiv E_2\) on the interval \([\Theta _{A_2}-t_0,\Theta _1-t_0]\), it follows that the functions \( x_1^{\Theta }(t+t_0)\) and \(x_2^{\Theta }(t+t_0) \) identically coincide on this interval with the respective components \(\hat x_1(t)\) and \(\hat x_2(t) \) of the solution \(\hat x(t) \) of the linear time-invariant system
with the initial conditions
By condition 2 in Theorem 2, the coefficient matrix of system (27) is stable and has simple spectrum. Let us show that the solution \(\hat x(t)\) of this system with the initial conditions (28) satisfies the relation \(\hat x_1(t)\ne y_2 \) for \(t\in [\Theta _{A_2}-t_0,\Theta _1-t_0)\).
Indeed, the first component \(x_1(t)\) of each solution \(x(t) \) of system (27) has the property
where \(x^*_1=\Delta -(mg+k\Delta )/(k+\alpha E_2/l) \); the convergence in (29) was proved in [1], while the inequality in (29) is the second inequality in condition 4 in Theorem 2.
Consider the equation
Since the vector function \((\hat x_1(t),\hat x_2(t))^{\mathrm {T}} \) on the interval \([\Theta _{A_2}-t_0,\Theta _1-t_0]\) is a solution of system (27) whose coefficient matrix has negative distinct eigenvalues \(\lambda _1 \) and \(\lambda _2 \), we have the representation
where \(C_1 \) and \(C_2 \) are some constants, which are not zero simultaneously, because
Therefore, Eq. (30) can be written in the form
Note that the function on the left-hand side in this equation may have at most one point of extremum for \(t>0 \), and hence Eq. (30) may have at most one root by virtue of property (29). Consequently, the equation \(x_1^{\Theta }(t+t_0)=y_2\) may have at most one root on the interval \(t\in [\Theta _{A_2}-t_0,\Theta _1-t_0]\). Since the function \( x_1^{\Theta }(t+t_0)\) takes the value \(y_2 \) at the point \(t=\Theta _1-t_0 \) by a condition in Theorem 2, we conclude that \(x_1^{\Theta }(t+t_0)\ne y_2 \) for \(t\in {[\Theta _{A_2}-t_0,\Theta _1-t_0)}\). Thus,
Now assume that the condition
is additionally satisfied for \(t_1^* \). Since the solution \(\tilde x(t) \) of the closed-loop system (5) with the initial conditions (24) is an oscillatory mode, we have the inequality \( \tilde x_1(t)>y_1,\quad t\in [\Theta _1-t_0,\Theta _{M_1}-t_0]. \) It follows in view of relations (31) and (26) that
Now consider the behavior of the functions \(\tilde x_1(t) \) and \(\tilde x_2(t) \) on the interval \([\Theta _{M_1}-t_0,\Theta -t_0]\). By analogy with the preceding argument, note that the identities \(\tilde x_1(t)\equiv x_1^{\Theta }(t+t_0) \) and \(\tilde x_2(t)\equiv x_2^{\Theta }(t+t_0)\) remain valid on the interval \([\Theta _{M_1}-t_0,\Theta -t_0]\) until time \(t_*\in [\Theta _{M_1}-t_0,\Theta -t_0]\) such that \(\tilde x_1(t_*)=x_1^{\Theta }(t_*+t_0)=y_1\). Let us show that \( x_1^{\Theta }(t+t_0)\ne y_1\) for \(t\in [\Theta _{M_1}-t_0,\Theta -t_0)\). Since \(\varphi (t+t_0)\equiv E_1\) on the interval \([\Theta _{M_1}-t_0,\Theta -t_0]\), it follows that the functions \( x_1^{\Theta }(t+t_0)\) and \(x_2^{\Theta }(t+t_0) \) identically coincide on this interval with the respective components \(\hat x_1(t)\) and \(\hat x_2(t) \) of the solution \(\hat x(t) \) of the linear time-invariant system
with the initial conditions
By condition 2 in Theorem 2, the coefficient matrix of system (34) is stable and has simple spectrum. Let us show that the solution \(\hat x(t)\) of this system with the initial conditions (35) satisfies the relation \(\hat x_1(t)\ne y_1 \) for \(t\in [\Theta _{M_1}-t_0,\Theta -t_0)\).
Indeed, the first component \(x_1(t)\) of each solution \(x(t) \) of system (34) has the property
where \(x^{**}=\Delta -(mg+k\Delta )/(k+\alpha E_1/l)\); the convergence in (36) was proved in the paper [1], while the inequality is the first inequality in condition 4 in Theorem 2.
Consider the equation
Since the vector function \((x_1^{\Theta }(t),x_2^{\Theta }(t))^{\mathrm {T}} \) on the interval \([\Theta _{M_1}-t_0,\Theta -t_0]\) is a solution of system (34) whose coefficient matrix has distinct negative eigenvalues \(\lambda ^{\prime }_1\) and \(\lambda ^{\prime }_2 \), one has the representation
where \(C_1\) and \(C_2 \) are some constants, which are not zero simultaneously, because
Therefore, Eq. (37) can be written in the form
Note that the function on the left-hand side in this equation may have at most one point of extremum for \(t>0 \), and then Eq. (37) may have at most one root by virtue of property (36). Consequently, the equation \(x_1^{\Theta }(t+t_0)=y_1\) may have at most one root on the interval \(t\in [\Theta _{M_1}-t_0,\Theta -t_0]\). Since the function \( x_1^{\Theta }(t+t_0)\) takes the value \(y_1 \) at the point \(t=\Theta -t_0 \) by a condition in Theorem 2, we conclude that \(x_1^{\Theta }(t+t_0)\ne y_1 \) for \(t\in [\Theta _{M_1}-t_0,\Theta -t_0)\). Thus,
This, together with identity (33), implies that
Let us impose one more constraint on the constant \(t_1^* \); namely, let
Since the solution \(\tilde x(t)\) of the closed-loop system (5) with the initial conditions (24) is an oscillatory mode, it follows that
This, together with identity (38), implies that the switching times of the bang-bang control (3) and the programmed control (9) for \(t\in [0,\Theta ] \) coincide. Then one has the identity \(\tilde x(t)\equiv x^{\Theta }(t+t_0)\) on this interval, and this identity remains valid for all \(t\geq 0\) by virtue of the \(\Theta \)-periodicity of the function \(x^{\Theta }(t+t_0) \).
Consequently, the oscillatory mode \(\tilde x(t) \) of system (5) with the initial conditions (24) is a periodic mode. Thus, we have proved the following assertion about the existence of a periodic mode in the closed-loop system (5).
Theorem 3.
Let the assumptions of Theorem 2 be satisfied, and let inequalities (25), (32), and (39) hold. Then there exists a periodic mode with the initial conditions (24) in the closed-loop system (5).
4. SIMULATION RESULTS
Consider system (1) with the parameters
Using the results in the present paper, we can calculate the parameters
of the feedback (3) for which there exists a periodic motion (Fig. 5) with period \(\Theta =0.2\) in the corresponding closed-loop system with \(E(0)=4.73\cdot 10^8\) and with the initial conditions
Here the bang-bang control switching times are \(t_1=\Theta _1-t_0\) and \(t_2=\Theta -t_0 \), where \(\Theta _1=0.1 \) and \(t_0=0.036 \).

Graphs of the functions \(y(t) \), \(T(t) \), and \(E(t) \) corresponding to a periodic mode of system (1).
CONCLUSIONS
The paper considers a mathematical model of a thermal energy harvester [1] in the form of the controlled nonlinear dynamical system (1) whose coefficients are positive numerical parameters. The main problem is to choose a control algorithm ensuring the occurrence of a periodic motion in the closed-loop system. As a control algorithm, it is proposed to use output feedback with feedback operator in the form of a bang-bang hysteresis control. As a result, sufficient conditions are obtained for the coefficients and initial values of the state variables of system (1) and for the parameters of the controller (3) ensuring the occurrence of a periodic mode in the closed-loop system.
REFERENCES
Fursov, A.S., Todorov, T.S., Krylov, P.A., and Mitrev, R.P., On the existence of oscillatory modes in a nonlinear system with hystereses, Differ. Equations, 2020, vol. 56, no. 8, pp. 1081–1099.
Todorov, T., Nikolov, N., Todorov, G., and Ralev, Y., Modelling and investigation of a hybrid thermal energy harvester, MATEC Web Conf., 2018, vol. 148, p. 12002.
Pai, A., A phenomenological model of shape memory alloys including time-varying stress, Master Appl. Sci. Thesis, Waterloo, Ontario, Canada: Univ. Waterloo, 2007.
Obmorshev, A.N., Vvedenie v teoriyu kolebanii (Introduction to Vibration Theory), Moscow: Nauka, 1965.
Demidovich, B.P., Lektsii po matematicheskoi teorii ustoichivosti (Lectures on the Mathematical Theory of Stability), Moscow: Nauka, 1967.
Funding
This work was supported by the Russian Foundation for Basic Research and the National Science Foundation of Bulgaria, project no. 19-57-18006; the Russian Foundation for Basic Research, projects nos. 20-57-0001, 20-07-00827, and 19-07-00294; and the RF Ministry of Education and Science within the framework of the program of the Moscow Center for Fundamental and Applied Mathematics by agreement no. 075-15-2019-1621.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated by V. Potapchouck
Rights and permissions
Open Access. This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fursov, A.S., Mitrev, R.P., Krylov, P.A. et al. On the Existence of a Periodic Mode in a Nonlinear System. Diff Equat 57, 1076–1087 (2021). https://doi.org/10.1134/S0012266121080127
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0012266121080127