
Abstract
Home ranges of free-living mammals have typically been studied via radio-tracking to understand how individuals use their environment. Recently, GPS collars have become popular in large mammals. However, GPS collars are rarely used in small mammals, as they are too heavy, especially when needing coating to protect against gnawing. Here we test the efficiency of mini-GPS collars to measure range estimates compared to the use of radio-collars in a small rodent of 100 g body mass. We equipped 20 bush Karoo rats with mini-GPS loggers and thereafter with radio-transmitters to determine ranges. We validated the accuracy of the mini-GPS loggers by comparing them with the fixes from a handheld GPS and found both to be similar. We estimated range sizes using both traditional methods of Kernel and minimum convex polygon estimates as well as modern methods from movement ecology taking the location error of the mini-GPS into account. Using modern methods led to smaller range estimates, but results were in so far consistent that daily ranges for bush Karoo rats determined using mini-GPS were much larger than home range estimates from radio tracking. Using radio-tracking enabled us to establish the central shelter, while the mini-GPS revealed areas where rats had been observed foraging. We found a distinct location error and therefore suggest using modern approaches from movement ecology which can take this error into account. In sum, mini-GPS revealed more accurate estimates of the ranges than radio-tracking in a small rodent of 100 g body mass.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Studying the home range sizes and daily ranges of animals is important to understand how they use their environment and the constituent resources (Burt 1943; Börger et al. 2008; Potts and Lewis 2014). Animals occupy areas that allow them to acquire sufficient resources for reproduction and survival, minimizing time and energy for territory defence (Maynard Smith 1974; Powell 2000). While the home range has been defined as “the area traversed by an animal during its normal activities such as food gathering, mating, and caring for young” (Burt 1943), the home range sizes in turn vary by resource availability and distribution (Schradin et al. 2010; Schoepf et al. 2015). For example, the female striped mice (Rhabdomys pumilio) displayed seasonal variation in home range size, with the home range size being larger in the wet season than in the dry season (Edelman and Koprowski 2006; Schradin and Pillay 2006). Lastly, significant sex differences exist during the breeding season, with males having larger home ranges than females (Inoue 1991; Eccard et al. 2004). While ascertaining range size is important, this requires high investment.
Some techniques of assessing animal ranges date back to tracking spoors, direct observations, spooling animals, capture mark-recapture, and radio-tracking. For example, the home ranges of Kalahari lions (Panthera leo) and leopards (Panthera pardus) were studied via spoor tracking over several months (du P Bothma and Le Riche 1984). These studies also involved direct focal animal observation. Spooling, where a thread is attached to the animal to detect its movement, has been used in studies of cryptic small mammals (Hawkins and Macdonald 1992). Earlier studies of animal ranges also included capture mark-recapture trapping, whereby an animal was trapped, marked, released and trapped again (reviewed by Mohr 1947). Improved technology has allowed animals to be equipped with radio-collars and then to be found using radio-tracking (Loy et al. 1994; Gardner and Serena 1995; Ophir et al. 2008; Schneider and Kappeler 2016) or even via automated radio-tracking (Ward et al. 2013; DeGregorio et al. 2018). Techniques to assess animal ranges differ in accuracy, with radio-tracking being more accurate than spoor tracking, spooling, and capture mark-recapture, yet all these methods require high-time investment (Kays et al. 2015).
The more recently developed GPS collars offer an accurate low-time investment technology and have been used to collect data for the range use of large mammals such as African ungulates (Owen-Smith and Goodall 2014) and European brown bears (Ursus arctos) (De Angelis et al. 2021). Examples of medium sized mammals that have been equipped with GPS collars include the ~ 5 kg red fox (Vulpes vulpes, Walton and Mattisson 2021), different mongoose species of ~ 4 kg (Herpestidae, Streicher et al. 2020), the ~ 1 kg West European hedgehog (Erinaceus europaeus, Gazzard et al. (2022)), the 1.3 kg marsupial woylie (Bettongia penicillate; Bateman et al. (2017)), the 400 g pygmy rabbit (Brachylagus idahoensis, McMahon et al. 2017) and the 165 g golden-mantled ground squirrels (Callospermophilus laterali; Hefty and Stewart 2019). However, the majority of mammal species are even smaller than that: more than 4000 out of all 6399 extant mammal species are small with a body mass below 100 g, including members of orders Rodentia, Chiroptera, and Eulipotyphla (Burgin et al. 2018). Until now, GPS collars were typically too heavy to attach on small mammals. This is because most small mammals are rodents (2552 species; Burgin et al. 2018) that are known to gnaw at any devices. Thus, any collar (radio- or GPS) needs extensive protective coating that typically weighs more than the device itself. GPS collars have been used on bats that are less than 100 g, but these collars do not need heavy coating compared to when they would be used on rodents of a similar weight (Hefty and Stewart 2019; Vleut et al. 2019). For example, the sizes of the coated collars used on the mongoose species and the red fox were 52 g and 210 g, respectively (Streicher et al. 2020; Walton and Mattisson 2021), both being too large to be used on smaller mammals.
So far, it is not well known whether the accuracy of GPS collar data is comparable, better or worse than that of radio-collars. This might depend on many factors, including range size and life history. GPS collars might generate more accurate data than radio-tracking in small mammals that are central place foragers as they interfere less with an animals’ behaviour. Central place foragers have a defined shelter, from which they forage within close proximity and easily return to the shelter in case of any disturbance by a predator (Orians and Pearson 1979). Examples include the colonial Brants’ whistling rat (Parotomys brantsii, Jackson 2001), Columbian ground squirrels (Urocitellus columbianus, Andrusiak and Harestad 1989), golden-mantled ground squirrels (Callospermophilus laterali; Hefty and Stewart 2019) and many species of marmots (Marmota spp., Lehrer et al. 2012). Radio-tracking such small mammals often involves the ‘homing in’ technique to obtain an accurate measure of the home range, i.e. the researcher approaches the animal from different directions until its exact position is located (Kenward 1987). However, this technique may disturb the natural ranging behaviour of the studied animals. In central place foragers this might lead to most fixes indicating the nest location and not the animal’s entire home range. In contrast, GPS collars do not disturb the animal and collect data while the animal is moving in its environment. Another method that offers disturbance free tracking would be automated tracking of animals carrying radio-collars (automated very high frequency VHF tracking) that has been used on small mammal and also has similar inter-fix intervals as GPS (Hoffmann et al. 2019; Kowalski et al. 2019; Schlägel et al. 2019; Schirmer et al. 2020; Eccard et al. 2022). However, automated tracking is expensive in time and money. It needs base stations that are to be maintained which is why it is best done at permanent research sites that have a technician. As it requires more than one person to be in the field it is not suitable for a single PhD student or researcher collecting data at a remote field site.
GPS collars have the problem of the location error, which means the tendency for positions to drift when the unit is stationary, e.g. due to the Kalman filter (Frair et al. 2010; Gunner et al. 2022). The location error is the distance between the GPS-generated location and the true location. It occurs as every GPS has some inaccuracy associated with it. The location error is further affected by environmental characteristics (e.g. terrain, vegetation) satellite acquisition (e.g. number of satellites detected, satellite geometry) and animal behaviour (including the position of the GPS on the animal). The location error becomes more important when the measured range size becomes smaller. Thus, when using GPS collars on small mammals, it is important to determine the location error to validate the method and if possible, to correct for it. No study has compared the range sizes obtained via mini-GPS loggers with those obtained from radio-tracking in small mammals, especially not while taking the location error into account.
Here, we present data on one small central place forager, the bush Karoo rat (Otomys unisulcatus), and compare the calculated range sizes obtained from mini-GPS loggers with those obtained from radio-tracking. We also compared between traditional methods of range estimation (Kernel contours and minimum convex polygons) and modern approaches from movement ecology (namely the autocorrelated kernel density estimation (AKDE), Fleming et al. 2015) which can take the location error into account. Bush Karoo rats live in the Succulent Karoo biodiversity hotspot in South Africa, characterized by very dry and hot summers. The bush Karoo rat was selected as the study animal as it is diurnal and occupies an open habitat and can be directly observed in the field (Schradin 2005). It builds stick lodges within large shrubs, and these lodges create a favorable micro-climate to buffer against temperature extremes (Brown and Willan 1991; du Plessis and Kerley 1991; du Plessis et al. 1992). It forages in proximity to its lodge(s), into which it withdraws if disturbed. Their territories can contain up to four lodges connected by runways and additional smaller shrubs providing cover. We expected bush Karoo rats to withdraw into their lodge when homing in during radio-tracking. Thus, we predicted mini-GPS data to reveal larger ranges than radio-tracking, which would represent a more accurate estimation of their range use.
Methods
Study area and period
The study was conducted at a 4-hectare field site adjacent to the Succulent Karoo Research Station located in the Goegap Nature Reserve, approximately 15 km from Springbok in the Northern Cape, South Africa. Data collection took place during the dry, non-breeding summer season from February until April 2022. The field site is in an open and flat environment, reducing risks of GPS inaccuracy.
Trapping, marking and observation of rats
Animal ethics clearance was provided by the University of the Witwatersrand (AESC 2018/03/15B). We placed a combination of foldable Sherman traps and locally produced metal traps of the Sherman style arranged around the entrances of occupied lodges (as indicated by the presence of faeces and plant material) and along active runways. Four traps were added per lodge and each lodge was trapped twice a month, each time for 3 consecutive days. Trapped rats were weighed, sexed and permanently marked with metal ear tags applied on both ears (National Band and Tag Co., Newport, KY, U.S.A.). We conducted focal animal observations before, during and after the attachment of collars to see if there was any indication that the collars influenced the behaviour of the rats.
Mini-GPS dataloggers
Altogether, 20 bush Karoo rats (14 females and 6 males) were fitted with Gipsy mini-GPS datalogger collars (Technosmart, Rome, Italy), which weighed 4.5 g, representing less than 5% of body weight (Fig. 1) (Murray and Fuller 2000). Rats weighed 96.6 ± 19.3 g (range: 67.5–131.2 g). Data collection started with a delay of 2 days after collar attachment to allow the bush Karoo rats to get accustomed to them (verified by focal animal observations at the lodge the day before the mini-GPS collected data). The Gipsys were programmed to collect GPS fixes (longitude, latitude, altitude, date, and time) on day 3 starting at 6 AM every 5 min, battery life did not allow us to collect data for more than 1 day. We chose this frequency as in our main running study (to be finished in 2023) we want to compare in how far neighbouring rats share their daily ranges (being in the same area at the same time), necessitating a higher frequency than for example one fix every 2 h. One fix every 5 min was the frequency allowing us to obtain the highest number of fixes possible within 24 h given the battery size. On day 4, we started to re-trap animals to remove the Gipsys. Data were collected from 8 rats using the model Gipsy5 and for 12 rats using the model Gipsy6; the two logger models differed slightly in their assessment of fix accuracy (see below).

A Bush Karoo rat carrying a mini-GPS datalogger. This female is marked with blond hair dye on the head and back, for individual recognition during behavioral observations
Radio collars (radio transmitters)
Following removal of the mini-GPS dataloggers, the rats were fitted with PD-2C radio transmitters (Holohil, Carp, Ontario, Canada), which weighed 3.3 g including the collar and were less than 5% of their body weight. GPS collars are less reliable than radio-collars, which is why we always first checked whether the Gipsys had successfully collected data (which was the case in 20 of 24 rats), before attaching radio-collars. This allowed us to reduce the number of individuals used in the study. Individuals were equipped with radio transmitters for a mean duration of 16.6 days (range 8–27 days). Radio-tracking was performed by using an AOR 8000 wide-range receiver (Tokyo, Japan) and a Telonics RA-14 K antenna (Mesa, Arizona) and we followed the same procedure as in multiple studies for striped mice on the same field site (Schradin and Pillay 2006; Schradin et al. 2010). Both species are diurnal but with an activity peak during mornings and afternoons (Schradin 2006). Striped mice seek shelter in different shrubs during the hot periods of the day and rarely in their main nesting site (Schradin 2006). The same might be true for bush Karoo rats, which often have several lodges and shade providing shrubs in their territory, as indicated by our observations and trapping data (Schradin 2006).
Individuals were radio-tracked for 7 days. Fixes were taken 6 times a day between 9 AM and 6 PM. To ensure independence of data points (Kenward 1987), intervals between fixes were approximately 1h 30 mins apart, giving rats enough time to traverse through their entire home range, except during the hottest part of the day (from 12 to 2 PM), when rats are inactive. Fixes were obtained by using the ‘homing in’ method: an individual was approached until we either saw it or identified the bush in which it was located. The location of the bush Karoo rat was then recorded with a handheld GPS (eTrex Venture, GARMIN International, Olathe, Kansas). In 4.2% of cases, the position of individuals was confirmed by visual sightings.
The coldest mean temperatures (recorded directly at the research station) during days we radio-tracked bush Karoo rats differed significantly from the temperatures on which they carried mini-GPS (14.8 ± 1.8 °C vs 17.3 ± 2.6 °C, paired t19 = 4.6, p < 0.001), but the hottest mean temperatures during days we radio-tracked did not differ significantly from the temperatures on which they carried mini-GPS (31.2 ± 2.3 °C vs 32.4 ± 1.4 °C, paired t19 = 1.67, p = 0.113). However, the rats are not active during the coldest times of the day and we would therefore not have obtained fixes from them with the mini-GPSs.
Validating mini-GPS accuracy
The accuracy of fixes with the handheld eTrex Venture GPS is specified to be ± 5 m by the manufacturer (GARMIN International). Accuracy of Gipsy5 dataloggers has been reported to be approximately 5 m (information provided by Technosmart) to 10 m (Fleming et al. 2021). Accuracy of the Gipsy6 mini-GPS logger was said to be approximately ± 5 m (information provided by Technosmart). As the accuracy of fixes can influence range estimates, we compared the two GPS instruments. For this, we took an 11-km hike through the Goegap Nature Reserve, with four mini-GPS loggers mounted onto a hat worn by one of the hikers while we used a handheld eTrex Venture GPS to collect the track data. We then compared fixes from the mini-GPS loggers with the track data and determined the distance of the logger fixes from the track. We did this in QGIS (QGIS 2009) using the distance to nearest hub (points) toolkit. The source points were the Gipsy points, and the destination points were the track points from the handheld GPS. We excluded fixes with an accuracy so low that we would have removed them from data analysis (see below).
For a measure of accuracy, Gipsy5 units record the HDOP (Horizontal Dilution of Precision), a value which describes the geometric strength of satellite configuration on GPS accuracy; lower values indicate higher accuracy) (Technosmart, Rome, Italy). Fixes with an HDOP > 5 were excluded.
Gipsy6 units record horizontal accuracy estimates for fixes, and provide accuracy data in the following five categories: > 100 m, < 100 m, < 50 m, < 15 m and < 10 m. It is important to note that these categories are rough estimates as in contrast to a large handheld GPS, the mini-GPS cannot directly determine their accuracy (information provided by Technosmart). In other words, a horizontal accuracy estimate of < 50 m means the fix is probably more accurate than one of the category < 100 m, but it does not mean the fix is 50 m away from the real position. To be able to rank the horizontal accuracy categories for how useful they are for our study species, we visualised the fixes of 15 individuals (of which 12 were also radio-tracked, 3 were used for other studies) in QGIS. We then related the five Gipsy categories to our own three accuracy categories: accuracy 1—data are within the expected area, all fixes were at places where the individuals had been observed by us during field work; accuracy 2—fixes with this accuracy were mainly in the area where the individual had been observed, with some being outside and some being more than 15 m away from the remaining fixes, indicating they could be possible outliers; and accuracy 3—many fixes were more than 15 m or even more than 50 m away from the area where the individual had been observed, indicating data inaccuracy.
We determined the location error for the Gipsy6 units by collecting calibration data using stationary tests. Four units were placed near lodges where a bush Karoo rat carried a Gipsy and allowed to collect fixed location data for 24 h. The calibration data were then used to estimate the location error through the ctmm (Calabrese et al. 2016) workflow in R and RStudio (Posit Team 2023; R Core Team 2022) and accounting for it before continuing with calculating the range sizes (Fleming et al. 2021). We also visually compared the data from the stationary Gipsys with the Gipsys carried by bush Karoo rats inhabiting the lodges.
Data analysis
For Gipsy5, fixes with an HDOP > 5 were excluded. The remaining fixes were visualised in QGIS and isolated outliers far (> 15 m) from the main lodge of the rat and from other fixes were excluded. For Gipsy6, fixes with a horizontal accuracy better than 50 m (i.e. < 50) were included; see results section for validation of this procedure.
We used several methods to calculate home range sizes. First, using the package adehabitatHR (Calenge 2015) in R (R Core Team 2022) we calculated the traditional measures used in radio-tracking studies: For comparison with other species, home range size was estimated as minimum convex polygons (MCP) which calculate the home range size by drawing a convex polygon around the individuals’ point data (Mohr 1947; Powell 2000). In contrast, Kernel density estimators calculate the probability of finding an individual in a particular location by using un-parametric statistics (Worton 1989). To account for the influence of outliers that may be missed during the cleaning process, we estimated 95% MCP and Kernel range sizes.
Second, we used the autocorrelated Kernel density estimation (AKDE) as implemented in the R packages ctmm (Calabrese et al. 2016) and ctmmweb (Dong et al. 2018) used in movement ecology for both GPS and radio-tracking data. This approach allowed us to account for location error in the calculations of range sizes within the ctmm workflow through two stages (Fleming et al. 2021). First, the calculations from the autocorrelation and bandwidth are error-informed, which mitigates various biases in autocorrelation and bandwidth estimates that would otherwise occur had location error been ignored. Second, location estimates are fed through a Kalman smoother before kernel placement, which counteracts overdispersal (Silva et al. 2022). Range estimates using the ctmm workflow were only possible for the 12 Gipsy6 units and not the 8 Gipsy5 units, as location errors were determined after the main study (due to comments by colleagues), when no Gipsy5 unit was available anymore. We present data for all approaches to enable the reader to compare the traditional with the more modern ways of home range analyses.
We ran a linear mixed model using the lme4 (Bates et al. 2015) package to analyse factors influencing the range size estimates. As the data were normally distributed, we used the gaussian family with the identity link function. The estimated range size was the dependent variable and as independent variable we included the equipment (Gipsy or radio-tracking), the used calculation model (MCP, Kernel, AKDE), and the sex of the individual. Due to the paired data, we included individual ID as random factor. We assessed model assumptions by inspecting Q–Q plots and by plotting model residuals against fitted values. We then performed post hoc analyses using the emmeans function from the emmeans package (Lenth et al. 2021) to determine pairwise differences in range size between the tracking method and estimation method. We adjusted p values using the Tukey method.
Results
Validating mini-GPS accuracy
Most of the fixes of the mini-GPS logger were on the track of the eTrex Venture handheld GPS (Fig. 2). Only at the start, when the Gipsy were switched on, and in a narrow valley, did some noticeable discrepancies occur (arrows in Fig. 2). For Gipsy5 units, fixes were on average 9 ± 12.3 m (excluding about 5 outliers) away from the track, and for Gipsy6 4.4 ± 3.7 m (excluding 3 outliers). As fixes of the handheld GPS and the Gipsys were not taken at the same time, the real accuracy was higher.

Track of a handheld extrex Venture GPS used during radio-tracking along a 11 km hike. In addition, fixes taken every 5 min of 3 Gipsy 5 units (Gipsy units 24, 25 and 27) and one Gipsy 6 unit (Gipsy 35) are shown. At the start of the hike (left, blue arrow), fixes from Gipsy 25 were off the track, and during the middle of the hike (right, green arrow) in a narrow valley, fixes of Gipsy 24 were off the track. Otherwise, most Gipsy fixes were on the handheld GPS track
Gipsy6: location error and accuracy depending on horizontal accuracy
The calculated location error for the four Gipsy6 units was 1.98 ± 0.16 m. Fixes with a horizontal accuracy of > 50 m were often unreliable outliers far away from areas where the animal had been observed during focal animal observations (Table 1). Therefore, we only included fixes with an accuracy better than 50 m for all further analysis.
Comparison of home ranges
The range estimates were significantly influenced by the tracking technique (p < 0.001), the calculation method used (p = 0.04), but not by sex (p = 0.09; Table 2). Home range estimates using radio-tracking were significantly smaller than those from mini-GPS units for all three measures (Fig. 3). During radio-tracking, bush Karoo rats were generally found in their main lodge (Fig. 4). Pairwise comparisons of range size between tracking method and estimation method showed no significant differences between the estimation methods (AKDE vs Kernel vs MCP; all p > 0.09; Fig. 3) but significant differences between the tracking methods (radio tracking vs gipsy, all p < 0.001).

Estimated range sizes generated from mini-GPS (red bars) or radio-tracking (blue bars), calculated via different methods: autocorrelated kernel density estimation (AKDE); minimum convex polygons (MCP) 95%; Kernel density estimates (Kernel) 95%

Daily ranges of four individuals (two males and two females) calculated using the MCP method for data obtained from mini-GPS (the large polygons) vs home range estimates from radio-tracking (the small polygons within). The colored dots represent the different collection methods for the individuals and those outside the polygons represent the outliers excluded by the 95% method
Discussion
Here we showed that mini-GPS dataloggers can provide reliable data on the range use of small rodents with a body mass of 100 g, even though the location error puts some limitations on the method. It is necessary to have reliable data of animal`s ranges if we want to understand their spatial structure (Powell 2000). For decades, radio-tracking has been the most common technique to obtain such data, but this method is time-consuming (Harris et al. 1990). Recently, in large mammals, radio-collars have been replaced by GPS dataloggers, but not in small mammals (Kays et al. 2015; Fujioka et al. 2020). We validated the use of min-GPS dataloggers in a small mammal and found range estimates to be larger and more realistic than those obtained from radio-tracking.
The main aim of our ongoing studies was to determine daily ranges using mini-GPS with a high frequency of fixes and to do this simultaneously in neighbouring bush Karoo rats to determine whether they co-occur in space and time (studies to be completed in 2023/2024). Here we wanted to validate whether the ranges we obtain with mini-GPS are reliable or too small. For this we chose radio-tracking for comparison because it was used previously successfully on the same field site for another small rodent with the same activity rhythm (Schradin and Pillay 2005). However, radio-tracking by homing in cannot be done every 5 min without permanent disturbance of the studied animals, so we chose to determine home ranges instead. One shortcoming of our comparison is that the intervals at which fixes were taken differed between both methods. However, for both techniques we used the interval of fixes most appropriate for it, comparing two methods as actually used by field researchers. In a study focusing on home ranges (instead of daily ranges), it might be better to program the mini-GPS to collect fixes every 2 h over several days (depending on battery size). If this method would yield smaller ranges than the daily ranges we obtained, this would indicate that our method is more valid. If it would yield larger ranges – which is to be expected – then this would strengthen our argument that mini-GPS provide larger and accurate estimates of (home) range sizes than does radio-tracking.
As predicted, the home range estimates obtained from radio-tracking were small. This was a result of the fixes obtained being concentrated at the individual’s lodges, into which the rats withdrew when approached by the person radio-tracking. We rarely saw the rats during radio tracking (4% of fixes), when they had withdrawn into their lodge, and which was in contrast to 40% of sightings of striped mice on the same field site in a previous study (Schradin and Pillay 2005). Rats had several lodges available in their home range but typically were always radio-tracked in the same lodge, which contrasts with the sympatric diurnal striped mouse that during the day often rests away from its nesting site. In contrast to radio-tracking data, the daily range estimates from the GPS dataloggers included the foraging grounds of rats which we knew from observations during our field work.
The range estimates using mini-GPS dataloggers were 5 to 10 times larger than those estimated from radio-tracking data. The range data obtained from bush Karoo rats via radio-tracking using the homing-in technique mainly provided us with the information where they are nesting, but not where they are foraging. Theoretically, it is possible to get more accurate radio-tracking data by not approaching the rats, but by using trigonometry from a larger distance of 30–50 m (the range of radio-transmitter signals), but this method has a larger error and with our rats having smaller ranges, this would lead to high inaccuracies. Automated radio-tracking with base stations (Hoffmann et al. 2019; Kowalski et al. 2019; Schlägel et al. 2019; Schirmer et al. 2020; Eccard et al. 2022) could be a good alternative, but it is work-intensive to establish such a system and to maintain it technically. For projects that need permanent data on range use and that have a larger research team working on it simultaneously, such automated radio-tracking might be the best solution.
Differences in range size estimates between radio-tracking and mini-GPS loggers were not due to differences in size of the devices nor the duration of data collection. Radio-transmitters were much smaller than mini-GPS loggers, and data were collected over 7 days, and not only for 1 day as with the mini-GPS loggers. If rats would be more active carrying smaller devices and observed in more areas when monitored for a longer period, then this would suggest finding larger range sizes with radio-transmitters than with mini-GPS, but we found the opposite.
Every new method employed should be validated for accuracy. We found that the fixes obtained from the mini-GPS dataloggers matched those from the handheld GPS used for radio-tracking during a hike. Thus, we concluded that the larger ranges obtained from the mini-GPS dataloggers were not due to a lower accuracy of its fixes, as they were as accurate as the fixes from radio-tracking. We cleaned the mini-GPS data by excluding points with high inaccuracy. We excluded fixes with low estimated horizontal accuracy. While we included fixes which had a reported horizontal accuracy of < 50 m, our visualisation indicated that fixes where within a diameter of 10–20 m from each other (Fig. 4). By using the 95% MCP, we were able to exclude obvious outliers and computed range estimates that included the areas in which we had observed the rats foraging. In sum, mini-GPS data had to be cleaned and by using 95% MCP excluding obvious outliers, we obtained useable range data.
Another aspect that must be accounted for in studies using GPS dataloggers is the location error (Thomson et al. 2017; Fleming et al. 2021). Every GPS has some inaccuracy associated with it and the location error is the distance between the GPS-generated location and the true location (Frair et al. 2010; McMahon et al. 2017 and references within). For animals with small ranges, the location error could be larger than the daily range, making it impossible to estimate it correctly. We accounted for the location error by calculating our range estimates using the ctmm package that not only takes calibrated data into account but also accounts for possible autocorrelation that may be associated with GPS data collection (Fleming et al. 2015, 2021; Calabrese et al. 2016). When the location error is not accounted for, this may lead to improper conclusions on the range estimates of the animal under study (McMahon et al. 2017; Fleming et al. 2021). Traditional methods such as MCP and Kernel density do not account for biases in their calculations that have become inherent with the advances in technology, such as small sample sizes and autocorrelation. Furthermore, there has been no formal way to account for location error with these estimates before the introduction of certain mathematical models (such as ctmm). In sum, it was important to account for location error before estimating ranges using mini-GPS data (Fig. 5) to obtain reliable range data and doing so leads to more accurate estimates than radio-tracking (Fig. 3).

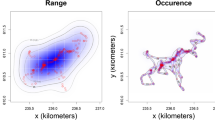
Daily ranges of four females calculated using the ctmm package method as autocorrelated Kernel density estimates correcting for the location error vs the stationary test units placed at the nests (the small lines within). This diagram shows that while location errors are relatively large for these small daily ranges, our method allowed to calculate daily ranges that are clearly larger than the location error
Using radio-tracking to obtain range estimates needs a high time investment in collecting data over multiple days. Estimating ranges from mini-GPS datalogger data requires time for logger programming, value transformation, and data cleaning (about 1 hour per unit). For radio-tracking, we spent approximately 42 h in the field to obtain data for three individuals (6 × 1 h every day, for 7 days) or 7 h per individual, and 1 hour to download and organise the data. Mini-GPS are approximately twice the price of radio-collars (approx. 400 vs. 200 Euros per unit), but while radio-collars have to be sent in to replace batteries, the batteries of mini-GPS can be charged on location. Using mini-GPS dataloggers is a much lower time investment than radio-tracking but needs significant investment for validation.
Conclusions
Mini-GPS dataloggers have been successfully used in large mammals and in bats (Corlatti et al. 2012; Conenna et al. 2019; Vleut et al. 2019), but not in other small mammals below 100 g body mass. In contrast to bats, dataloggers used on rodents and Eulipotyphla need strong coating to protect them from gnawing. When using GPS dataloggers it is important to account for location error to obtain reliable range estimates, especially for small mammals with small ranges (McMahon et al. 2017). Here we showed that for a central place foraging rodent of less than 100 g, using mini-GPS dataloggers produce better range use data than radio-collars. Mini-GPS have been used previously in another central place forager, the golden-mantled ground squirrels (Callospermophilus lateralis) (Hefty and Stewart 2019), but this species is nearly double as heavy as bush Karoo rats, and the data were not compared to radio-tracking. Future studies should test whether mini-GPS or radio-tracking would lead to more accurate range estimates in small mammals having foraging strategies different from central place foraging. Considering the progress in producing ever smaller GPS and the lower workload of using mini-GPS than radio-tracking, we encourage other researchers to test and validate whether this technology is also useful for small mammals with large home ranges and different foraging strategies.
Data availability
Data used in this study can be made available upon request.
References
Andrusiak LA, Harestad AS (1989) Feeding behaviour and distance from burrows of Columbian ground squirrels. Can J Zool 67:381384
Bateman A, Chambers B, Pacioni C, Rafferty C, Jones K, Bencini R (2017) Application of underpasses to expand nature reserves: responses of a critically endangered marsupial, the woylie, Bettongia penicillata. Hystrix 28:194201
Bates D, Maechler M, Bolker B, Walker S (2015) Fitting linear mixed-effects models using lme4. J Stat Soft 67:1–48
Börger L, Dalziel BD, Fryxell JM (2008) Are there general mechanisms of animal home range behavior? A review and prospects for future research. Ecol Lett 11:1–14
Brown E, Willan K (1991) Microhabitat selection and use by the bush Karoo rat Otomys unisulcatus in the Eastern Cape Province. Afr J Wildl Res 21:69–75
Burgin CJ, Colella JP, Kahn PL, Upham NS (2018) How many species of mammals are there? J Mammal 99:1–14
Burt WH (1943) Territoriality and home range concepts as applied to mammals. J Mammal 24:346–352
Calabrese JM, Fleming CH, Gurarie E (2016) ctmm: an R package for analyzing animal relocation data as a continuous-time stochastic process. Meth Ecol Evol 7:1124–1132
Calenge C (2015) adehabitatHR: Home range estimation. R package version 0414.
Conenna I, López-Baucells A, Rocha R, Ripperger S, Cabeza M (2019) Movement seasonality in a desert-dwelling bat revealed by miniature GPS loggers. Mov Ecol 7:1–10
Corlatti L, Béthaz S, von Hardenberg A, Bassano B, Palme R, Lovari S (2012) Hormones, parasites and male mating tactics in Alpine chamois: identifying the mechanisms of life history trade-offs. Anim Behav 84:1061–1070
De Angelis D, Huber D, Reljic S, Ciucci P, Kusak J (2021) Factors affecting the home range of Dinaric-Pindos brown bears. J Mammal 102:1–13
DeGregorio BA, Ravesi M, Sperry JH, Tetzlaff SJ, Josimovich J, Matthews M, Kingsbury BA (2018) Daily and seasonal activity patterns of the Massasauga (Sistrurus catenatus): an automated radio-telemetry study. Herpet Conserv Biol 13:10–16
Dong X, Fleming C, Noonan M, Calabrese J (2018) Ctmmweb: A shiny web app for the ctmm movement analysis package. https://github.com/ctmm-initiative/ctmmweb.
du Bothma JP, Le Riche EN (1984) Aspects of the ecology and the behaviour of the leopard Panthera pardus in the Kalahari Desert. Koedoe 27:259–279
du Plessis A, Kerley GIH (1991) Refuge strategies and habitat segregation in two sympatric rodents Otomys unisulcatus and Parotomys brantsii. J Zool Lond 224:1–10
du Plessis A, Kerley GIH, Winter PED (1992) Refuge microclimates of rodents: a surface nesting Otomys unisulcatus and a burrowing Parotomys brantsii. Acta Theriol 37:351358
Eccard JA, Meyer J, Sundell J (2004) Space use, circadian activity pattern, and matting system of the nocturnal tree rat Thallomys nigricauda. J Mammal 85:440–445
Eccard JA, Herde A, Schuster AC, Liesenjohann T, Knopp T, Heckel G, Dammhahn M (2022) Fitness, risk taking, and spatial behavior covary with boldness in experimental vole populations. Ecol Evol 12:e8521
Edelman AJ, Koprowski JL (2006) Seasonal changes in home ranges of Abert’s squirrels: impact of mating season. Can J Zool 84:404–411
Fleming CH, Fagan WF, Mueller T, Olson KA, Leimgruber P, Calabrese JM (2015) Rigorous home range estimation with movement data: a new autocorrelated kernel density estimator. Ecology 95:1182–1188
Fleming CH, Dresher-Lehman J, Noonan MJ, Akre T, LaPoint SC, Meyburg B-U, van Noordwijk MA, Pfeiffer T, Roulin A, Séchaud R, Shephard JM, Stabach JA, Stein K, Tonra CM, Vogel ER, Calabrese JM (2021) A comprehensive framework for handling location error in animal tracking data. bioRxiv. https://doi.org/10.1101/2020.06.12.130195
Frair JL, Fieberg J, Hebblewhite M, Cagnacci F, DeCesare NJ, Pedrotti L (2010) Resolving issues of imprecise and habitat-biased locations in ecological analyses using GPS telemetry data. Phil Trans R Soc B 365:2187–2200
Fujioka E, Yoshimura K, Ujino T, Yoda K, Fukui D, Hiryu S (2020) Selection of foraging and commuting habitats of the greater horseshoe bat, revealed by high-resolution GPS-tracking. Res Sq. https://doi.org/10.21203/rs.3.rs-80636/v1
Gardner J, Serena M (1995) Spatial-organization and movement patterns of adult male platypus, Ornithorhynchus anatinus (Monotremata, Ornithorhynchidae). Aust J Zool 43:91–103
Gazzard A, Yarnell RW, Baker PJ (2022) Fine-scale habitat selection of a small mammalian urban adapter: the West European hedgehog (Erinaceus europaeus). Mamm Biol 102:387–403
Gunner RM, Wilson RP, Holton MD, Hopkins P, Bell SH, Marks NJ, Bennett NC, Ferreira S, Govender D, Viljoen P (2022) Decision rules for determining terrestrial movement and the consequences for filtering high-resolution global positioning system tracks: a case study using the African lion (Panthera leo). J R Soc Int 19:20210692
Harris S, Cresswell W, Forde P, Trewhella W, Woollard T, Wray S (1990) Home-range analysis using radio-tracking data–a review of problems and techniques particularly as applied to the study of mammals. Mamm Rev 20:97–123
Hawkins CE, Macdonald DW (1992) A spool-and-line method for investigating the movements of badgers, Meles meles. Mammalia 56:322–326
Hefty KL, Stewart KM (2019) Flexible resource use strategies of a central-place forager experiencing dynamic risk and opportunity. Mov Ecol 7:23
Hoffmann J, Schirmer A, Eccard JA (2019) Light pollution affects space use and interaction of two small mammal species irrespective of personality. BMC Ecol 19:1–11
Inoue T (1991) Sex differences in spatial distribution of the big-clawed shrew Sorex unguiculatus. Acta Theriol 36:229–237
Jackson T (2001) Factors influencing food collection behaviour in Brants`whistling rat (Parotomys brantsii): a central place forager. J Zool Lond 255:15–23
Kays R, Crofoot MC, Jetz W, Wikelski M (2015) Terrestrial animal tracking as an eye on life and planet. Science 348:aaa2478
Kenward R (1987) Wildlife radio tagging. Academic Press, London
Kowalski GJ, Grimm V, Herde A, Guenther A, Eccard JA (2019) Does animal personality affect movement in habitat corridors? Experiments with common voles (Microtus arvalis) using different corridor widths. Animals 9:291
Lehrer E, Schooley RL, Whittington JK (2012) Survival and antipredator behavior of woodchucks (Marmota monax) along an urban–agricultural gradient. Can J Zool 90:12–21
Lenth R, Singmann H, Love J, Buerkner P Herve M (2021) Emmeans: Estimated marginal means, aka least-squares means. R Package Version 1 (2018).
Loy A, Dupre E, Capanna E (1994) Territorial behavior in Talpa romana, a fosserial insectivore from south-central Italy. J Mamm 75:529–535
Maynard Smith J (1974) The theory of games and the evolution of animal conflicts. J Theo Biol 47:209–221
McMahon L, Rachlow J, Shipley L, Forbey J, Johnson T, Olsoy P (2017) Evaluation of micro-GPS receivers for tracking small-bodied mammals. PLoS One 12:e0173185
Mohr CO (1947) Table of equivalent populations of North American small mammals. Am Mid Nat 37:223
Murray DL, Fuller MR (2000) Research techniques in animal ecology: controversies and consequences. Columbia University Press, New York
Ophir AG, Wolff JO, Phelps SM (2008) Variation in neural V1aR predicts sexual fidelity and space use among male prairie voles in semi-natural settings. Proc Nat Acad Sci 105:1249–1254
Orians GH, Pearson NE (1979) On the theory of central place foraging. In: Horn Mitchell DJRD (ed) Analysis of ecological systems. Ohio State University Press, Columbus, pp 155–177
Owen-Smith N, Goodall V (2014) Coping with savanna seasonality: comparative daily activity patterns of African ungulates as revealed by GPS telemetry. J Zool 293:181–191
Posit team (2023) RStudio: Integrated development environment for R. Posit Software, PBC, Boston, MA. http://www.posit.co/.
Potts JR, Lewis MA (2014) How do animal territories form and change? Lessons from 20 years of mechanistic modelling. Proc Roy Soc B. https://doi.org/10.1098/rspb.2014.0231
Powell RA (2000) Animal home ranges and territories and home range estimators. In: Boitani Fuller LTK (ed) Research techniques in animal ecology: controversies and consequences. Columbia University Press, USA, pp 65–110
QGIS.org (2009) QGIS Geographic Information System. QGIS Association. http://www.qgis.org.
R Core Team (2022) R: A language and environment for statistical computing. R foundation for statistical computing, Vienna, Austria.
Schirmer A, Hoffmann J, Eccard JA, Dammhahn M (2020) My niche: individual spatial niche specialization affects within-and between-species interactions. Proc R Soc B 287:20192211
Schlägel UE, Signer J, Herde A, Eden S, Jeltsch F, Eccard JA, Dammhahn M (2019) Estimating interactions between individuals from concurrent animal movements. Meth Ecol Evol 10:12341245
Schneider TC, Kappeler PM (2016) Gregarious sexual segregation: the unusual social organization of the Malagasy narrow-striped mongoose (Mungotictis decemlineata). Behav Ecol Sociobiol 70:913–926
Schoepf I, Schmohl G, König B, Pillay N, Schradin C (2015) Manipulation of population density and food availability affects home range sizes of African striped mouse females. Anim Behav 99:53–60
Schradin C (2005) Nest-site competition in two diurnal rodents from the Succulent Karoo of South Africa. J Mamm 86:757–762
Schradin C (2006) Whole day follows of the striped mouse. J Ethol 24:37–43
Schradin C, Pillay N (2005) Intraspecific variation in the spatial and social organization of the African striped mouse. J Mamm 86:99–107
Schradin C, Pillay N (2006) Female striped mice (Rhabdomys pumilio) change their home ranges in response to seasonal variation in food availability. Behav Ecol 17:452–458
Schradin C, Schmohl G, Rödel HG, Schoepf I, Treffler SM, Brenner J, Bleeker M, Schubert M, König B, Pillay N (2010) Female home range size is regulated by resource distribution and intraspecific competition: a long-term field study. Anim Behav 79:195–203
Silva I, Fleming CH, Noonan MJ, Alston J, Folta C, Fagan WF, Calabrese JM (2022) Autocorrelation-informed home range estimation: a review and practical guide. Meth Ecol Evol 13:534–544
Streicher JP, Ramesh T, Downs CT (2020) Home range and core area utilisation of three co-existing mongoose species: large grey, water and white-tailed in the fragmented landscape of the KwaZulu-Natal Midlands, South Africa. Mamm Biol 100:273–283
Thomson J, Borger L, Christianen M, Esteban N, Laloe JO, Hays G (2017) Implications of location accuracy and data volume for home range estimation and fine-scale movement analysis: comparing argos and fastloc-gps tracking data. Mar Biol 164:204
Vleut I, Carter GG, Medellín RA (2019) Movement ecology of the carnivorous woolly false vampire bat (Chrotopterus auritus) in southern Mexico. PLoS One 14:e0220504
Walton Z, Mattisson J (2021) Down a hole: missing GPS positions reveal birth dates of an underground denning species, the red fox. Mamm Biol 101:357–362
Ward MP, Sperry JH, Weatherhead PJ (2013) Evaluation of automated radio telemetry for quantifying movements and home ranges of snakes. J Herp 47:337–345
Worton BJ (1989) Kernel methods for estimating the utilization distribution in home-range studies. Ecology 70:164–168
Acknowledgements
We are thankful for comments by N. Pillay, M. Enstipp and C. Catoni that significantly improved the manuscript. C.H. Fleming gave important advice and help with analysing the data while taking the location error into account. This study was made possible by the administrative and technical support of the Succulent Karoo Research Station (registered South African NPO 122-134). We are grateful for the support of Goegap Nature Reserve and its staff as well as the Northern Cape Department of Environment & Nature Conservation. This study was supported by the CNRS and the University of the Witwatersrand.
Funding
Open access funding provided by University of the Witwatersrand.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by LM. The study was supervised by CS. The first draft of the manuscript was written by LM and CS, and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflicts of interest to declare.
Additional information
Handling editor: Carlos Rouco.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Makuya, L., Schradin, C. Measuring range sizes in a 100-g rodent: mini-GPS are more reliable than transmitters, but the location error reduces reliability. Mamm Biol 103, 455–465 (2023). https://doi.org/10.1007/s42991-023-00365-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42991-023-00365-4