
Abstract
Understanding the amount of space required by animals to fulfill their biological needs is essential for comprehending their behavior, their ecological role within their community, and for effective conservation planning and resource management. The space-use patterns of habituated primates often are studied by using handheld GPS devices, which provide detailed movement information that can link patterns of ranging and space-use to the behavioral decisions that generate these patterns. However, these data may not accurately represent an animal’s total movements, posing challenges when the desired inference is at the home range scale. To address this problem, we used a 13-year dataset from 11 groups of white-faced capuchins (Cebus capucinus imitator) to examine the impact of sampling elements, such as sample size, regularity, and temporal coverage, on home range estimation accuracy. We found that accurate home range estimation is feasible with relatively small absolute sample sizes and irregular sampling, as long as the data are collected over extended time periods. Also, concentrated sampling can lead to bias and overconfidence due to uncaptured variations in space use and underlying movement behaviors. Sampling protocols relying on handheld GPS for home range estimation are improved by maximizing independent location data distributed across time periods much longer than the target species’ home range crossing timescale.
Resumen
Comprender la cantidad de espacio que necesitan los animales para satisfacer sus necesidades biológicas es esencial para entender su comportamiento, su papel ecológico dentro de su comunidad y para una planificación eficaz de la conservación y la gestión de los recursos. Con frecuencia, los primates habituados están estudiados utilizando datos de GPS portátil, que proporcionan información detallada sobre sus movimientos y permiten relacionar los patrones de desplazamiento y uso del espacio con las decisiones conductuales que los generan. Sin embargo, es posible que estos datos no representen con exactitud la totalidad de los movimientos de un animal, lo que plantea problemas cuando la inferencia deseada es a escala del área de campeo. Para abordar este problema, utilizamos un extenso conjunto de datos de 13 años de 11 grupos de capuchinos de cara blanca (Cebus capucinus imitator) para examinar el impacto de los elementos de muestreo, como el tamaño de la muestra, la regularidad y la cobertura temporal, en la precisión de la estimación del área de distribución. Encontramos que la estimación fiable del área de distribución es factible con tamaños de muestra absolutos relativamente pequeños y muestreos irregulares, siempre que los datos se recojan durante periodos de tiempo prolongados. También ilustramos cómo el muestreo concentrado puede conducir a sesgos y a un exceso de confianza debido a variaciones no capturadas en el uso del espacio y en los comportamientos de movimiento subyacentes. Los protocolos de muestreo basados en GPS portátiles para la estimación del área de distribución se mejoran maximizando los datos de localización independientes distribuidos a lo largo de periodos de tiempo mucho más largos que la escala temporal de cruce del área de distribución de la especie objetivo.*The translated abstract was not copy-edited by Springer Nature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Animal space use often is described by using the home-range concept, developed by Burt (1943), who defined the home range as “the area traversed by the individual in its normal activities of food gathering, mating and caring for young” (p. 351). The home-range concept is integral to primate research, helping us understand how individuals—and social groups—interact with one another and their environment. Measuring home ranges provides insights into various elements of behavioral ecology, such as habitat selection, species abundance, and distribution (Gautestad & Mysterud, 2005), metabolism (Harvey & Clutton-Brock, 1981), learning and cognition (Spencer, 2012), resource competition (Crofoot et al., 2008), predator–prey dynamics (Suraci et al., 2022), and the roles species play in their ecological communities (e.g., seed dispersal (Gelmi-Candusso et al., 2019) and pollination (Abe et al., 2011)). Home-range estimates are frequently used to inform species’ minimum area requirements (Pe’er et al., 2014), size recommendations for protected areas (Brashares et al., 2001), land-use decisions (Johansson et al., 2016), and other aspects of conservation policy and initiative.
Although home-range estimation is a simple concept, in practice, it is logistically and statistically challenging (Fleming et al., 2015b). Recent research has identified three key elements required to estimate an accurate home range: 1) a quantitative definition of the home range (Börger et al., 2020); 2) sufficient sampling across the home range, which generally scales with time rather than number of recorded locations (Fleming et al., 2018); and 3) a robust estimator that extrapolates future space use and provides a workflow to overcome the numerous possible sources of bias in home range estimation (Fleming et al., 2015b). Furthermore, having a home range requires site fidelity, the tendency to remain or return to previously occupied areas (Switzer, 1993). Thus, most approaches assume home ranges are stationary, and the data themselves must show clear evidence of range residency; otherwise, home-range analysis is not appropriate (Fleming & Calabrese, 2017).
Burt’s definition (1943) provides a conceptual framework for the home range, but it lacks the statistical basis needed to quantify it (Silva et al., 2021). Early efforts quantify the home range by using the Minimum Convex Polygon (MCP), an approach that involves drawing the smallest convex polygon which encompasses all the recorded locations (Börger et al., 2020; Mohr, 1947). However, joining the outermost points in this manner yields biased estimates that are sensitive to sampling and assume uniform space use (Burt, 1943; Kernohan et al., 2001; Worton, 1995). Efforts have since focused on measuring the utilization distribution (hereafter UD) (Worton, 1989). The UD is a density function describing the probability distribution of an animal or group being at any point in space within a particular area (Börger et al., 2020; Calhoun & Casby, 1958; Jennrich & Turner, 1969). The 95% UD—or “the smallest area associated with a 95% probability of finding the animal” (Fieberg & Kochanny, 2005, p. 1346; White & Garrott, 1990)—is the widely adopted, although somewhat arbitrary, quantitative formulation, as Burt’s original home range concept excludes “occasional sallies outside the area used for normal activities” that are “perhaps exploratory by nature” (Burt, 1943, p. 351).
Constructing UDs generally involves kernel density estimation (hereafter KDE). KDEs place kernels, or small probability density functions, over each location data point and averages them to acquire a total probability density function across all points (Börger et al., 2020; Worton, 1989). The resulting probability density function has the highest density where points are the most concentrated (Worton, 1989). The conventional KDE method was developed for home-range estimation when movement data were generally collected at relatively low sampling rates by using VHF radiotelemetry (Börger et al., 2020). Consequently, the underlying statistics of the KDE assumes that the data have no autocorrelation (Worton, 1989), meaning the observed locations are independent of previous and subsequent observed locations. This is a false assumption with recent GPS-based sampling regimes, as the ability of these devices to collect movement data at higher frequencies results in greater degrees of autocorrelation in movement datasets (Fleming et al., 2015b). When the data are sampled at intervals short enough that recorded locations are correlated in space and time, which can be as coarse as one fix per day (Calabrese et al., 2016), the assumptions of the conventional KDE are violated (Fleming et al., 2015b).
In the context of autocorrelated data, traditional KDE methods yield UDs that are better suited to reflecting an animal’s space use during the observation period (i.e., occurrence distribution), rather than providing a home range estimate that extrapolates beyond the observed data to encompass future space use (i.e., range distribution) (Börger et al., 2020). The range distribution aligns with Burt’s initial description of the home range by measuring an animal’s long-term space use, making it relatively resilient to variations in sampling effort (Fleming et al., 2015b). Conversely, the occurrence distribution focuses on space use during the observation period, making it highly sensitive to sampling and conforming closely to the observed data (Alston et al., 2022) (Fig. 1).

Comparison of a range distribution estimate versus an occurrence distribution estimate calculated and depicted using the same location data collected from a single group of white-faced capuchins at the Lomas Barbudal Monkey Project in Costa Rica, September 12, 2010 to December 31, 2010. The range distribution is calculated using auto-correlated kernel density estimation and the occurrence distribution is calculated using time-series Kriging. Red points are recorded locations of capuchin movements, blue represents the estimated utilization distribution, and black lines show the mean and 95% confidence interval boundary of the 95% level utilization distribution.
Calculating the occurrence distribution is valuable for analytical purposes unrelated to home range estimation, such as path reconstruction (Fleming et al., 2015a), and determining the times and locations of animal interactions or crossings over landscape features (Alston et al., 2022). Several methods explicitly estimate the occurrence distribution including Brownian bridge approaches (Horne et al., 2007), the continuous-time correlated random walk (Johnson et al., 2008), time-dependent LocoH (Lyons et al., 2013), and time-series Kriging (Fleming et al., 2015a). Nevertheless, KDE is widely used to estimate the home range (hereafter referred to as the range distribution), instead of the occurrence distribution (Fleming et al., 2015b), which is only suitable on the occasions where the recorded location data are independent and not autocorrelated (Börger et al., 2020).
The autocorrelation found in most movement datasets generates UDs that more closely resemble the occurrence distribution, particularly when using KDE. As the occurrence distribution does not accommodate out-of-sample space use, the resulting area estimates are prone to negative bias and can lead to misinterpretation when the intended goal is home range estimation (Fleming et al., 2014b). However, if the desired outcome is occurrence estimation, KDE may be a viable option (Börger et al., 2020); thus, it is crucial for researchers to clearly identify their target of inference and select an appropriate estimator accordingly (Alston et al., 2022)
Recently developed home range estimation methods explicitly estimate the range distribution and account for the fact that animals’ paths result from movement processes that are, by definition, spatiotemporally autocorrelated. These methods explicitly treat movement data as a sample of location estimates taken along an animal’s mostly unobserved continuous movement path (Fleming et al., 2015b). One of these methods, auto-correlated kernel density estimation (hereafter AKDE), improves upon the KDE by modelling the underlying continuous-time movement process of the animal (Calabrese et al., 2016). AKDEs generate home-range estimates that are informed by autocorrelated data, rather than hindered by it. They also provide the analytical toolkit to handle several other obstacles, such as location error, irregular sampling, bandwidth optimization, and estimation uncertainty (Fleming & Calabrese, 2017; Fleming et al., 2018, 2020).
A thorough evaluation of the AKDE compared against commonly used approaches, such as the MCP, KDE, and Local Convex Hull (LocoH), shows that the AKDE is superior in capturing space use out of sample and is the only estimator capable of producing unbiased estimates with low effective sample sizes (Noonan et al., 2019). While AKDE is increasingly adopted in studies of animal ranging behavior (Crabb et al., 2022; Desbiez et al., 2020; Lenske & Nocera, 2018; McEvoy et al., 2019; Montano et al., 2021; Naveda-Rodríguez et al., 2022; Poessel et al., 2022), the overwhelming majority of studies still use methods, such as the MCP and KDE (Börger et al., 2020; Fleming & Calabrese, 2017; Hemson et al., 2005; Laver & Kelly, 2010; Powell, 2000). The potential presence of significant, systematic biases from applying these methods to estimate home-range area is concerning, because it can lead to erroneous conservation decision-making (Gaston et al., 2008) or inaccurate meta-analyses that influence public opinion and theoretical frameworks (Noonan et al., 2020). Also, particularly worrying is that the methods that are primarily used to record primate movement (e.g., handheld GPS) are different than those used on studies of most other species (e.g., GPS tags), introducing additional bias into any comparative work (McCann et al., 2021; Sennhenn-Reulen et al., 2017).
To estimate the home ranges of habituated groups or individuals, primatologists often gather location data via handheld GPS devices (e.g., ring-tailed lemurs (Lemur catta), Axel & Maurer, 2011; white-faced capuchins (Cebus capucinus imitator), Campos et al., 2014; Bornean southern gibbons (Hylobates albibarbis), Cheyne et al., 2019; Phayre's leaf monkeys (Trachypithecus phayrei), Gibson & Koenig, 2012; brown capuchins (Cebus apella), Hirsch et al., 2013; bonobos (Pan paniscus), McLester & Fruth, 2023; capuchins (Cebus sp.) and bearded sakis (Chiropotes satanas), Phillips et al., 1998; chimpanzees (Pan troglodytes), Potts et al., 2011; blue monkeys (Cercopithecus mitis), Roberts & Cords, 2015; mountain gorillas (Gorilla beringei beringei), Seiler & Robbins, 2020). These devices can be integrated easily into established data collection protocols (Brown & Crofoot, 2013) and provide a noninvasive means of tracking habituated animals in contrast to animal-borne tracking devices that require capture (e.g., VHF and GPS collars; Dore et al., 2020). The longitudinal datasets generated by using handheld GPS devices hold significant potential, as they may span multiple decades and have corresponding data on demography, behavior, and environmental variables (Campos et al., 2014; Gibson & Koenig, 2012; Irwin & Raharison, 2021; Seiler & Robbins, 2020). Thus, these datasets can give rise to novel and important investigations that are not feasible for most tracking studies. Yet, the accumulated handheld GPS data from longitudinal studies often is underused (Brown & Crofoot, 2013), with inquiries on social behavior and life history generally being of higher priority. Consequently, there is a lack of understanding of what drives long-term movement and space-use patterns of primates and how these patterns link with fitness and population demography.
Another key issue is that most modern approaches for estimating the home range, including the AKDE, are designed to handle movement data sampled continuously at discrete intervals over predetermined time periods (e.g., GPS tag datasets). Challenges arise when applying these approaches to the extensive, but often discontinuous and opportunistic datasets produced by tracking the movements of habituated animals using handheld GPS devices. When animal movement data are collected by tracking the movements of human observers (e.g., handheld GPS datasets), sampling bias may be introduced from several sources. For instance, data can only be collected when observers are present, causing missing data when rotating between multiple groups or during pauses in data collection. Bias also is introduced when some areas are less accessible to observers, for example over cliffs or flooded rivers. Sampling disruptions can be nonrandom in time and across behaviors, as researchers can more easily lose groups in rainy seasons where visibility and audibility are limited, or when groups are moving rapidly.
While handheld GPS data continues to be a valuable tool for primatologists in assessing space use and addressing ecological questions, the extent to which conventional sampling protocols in field primatology yield home range estimates that represent the biological home range (i.e. “true” home range) remains uncertain. To address this problem, we present an extensive longitudinal dataset from the Lomas Barbudal Monkey Project—comprising 13 years of handheld GPS data collected over 11 groups of white-faced capuchin monkeys (Cebus capucinus imitator) in Guanacaste, Costa Rica. This dataset exemplifies characteristic long-term datasets acquired in primate field studies, highlighting the significant challenges encountered by longitudinal studies in the context of handheld GPS sampling.
White-faced capuchins are well-suited for this study due to their residence within a specific range, making their movement data appropriate for estimating home ranges (Silva et al., 2021). Additionally, their tendency to move together as a group (Campos et al., 2014) enables the possibility of tracking groups using just one device operated by a human observer. They are platyrrhines that are primarily arboreal and live in multi-male, multi-female groups of approximately 5–40 individuals (mean = 18.8) (Perry, 2012). Females exhibit lifelong group fidelity, whereas males disperse during adolescence (mean age 7.6 years) (Perry et al., 2012). Their diet primarily consists of fruit and arthropods (McCabe & Fedigan, 2007; Perry & Jimenez, 2006), although they are dietary generalists and also consume flowers, eggs, pith, and small vertebrates. While home ranges frequently overlap with neighboring groups, they do not defend strict territorial boundaries; however, interactions between groups can be aggressive and occasionally fatal (Crofoot, 2007; Gros-Louis et al., 2003; Perry, 1996).
Our goal was to understand how to maximize the potential of long-term, handheld GPS data for accurate home-range estimation while providing practical suggestions for reliable sampling design. We thinned continuous segments of capuchin movement data into alternative sampling regimes of varying temporal scales and levels of consistency and assessed the home range estimation performance using cross validation from the total samples. While the true biological home range remains unknown, employing this approach permits increased understanding of how essential aspects of movement datasets, such as limited sample sizes and irregular sampling, can impact the performance of home range estimates derived from observations collected via handheld GPS. We address the following questions with respect to our dataset:
-
1.
What sample size from handheld GPS is necessary to maximize estimation performance?
-
2.
At what temporal scales should we measure home ranges?
-
3.
What are the most important considerations for obtaining representative samples?
Methods
Study Site
We conducted our field work at the Lomas Barbudal Monkey Project (referred to as “Lomas”), centered around the tropical dry forests of Reserva Biologica Lomas Barbudal (10°29–32′N, 85°21–24′W) in Guanacaste, Costa Rica. The field site also extends beyond the reserve to land owned by Finca El Pelón de la Bajura and other nearby private and public land. Initiating in 1990, the project has persisted until the present day, with its primary objective centered around the continuous monitoring of the social behavior and life history of white-faced capuchins (Perry et al., 2012).
The landscape at Lomas is rugged and highly heterogeneous, consisting of various distinct forest types, including dry deciduous, riparian, savanna, mesic, extreme deciduous, and regenerative, as well as large patches cleared for cattle ranching (Frankie et al., 1988). Lomas experiences extreme seasonality; virtually all annual rainfall (1,000–2,200 mm) occurs from May to November (Frankie et al., 1988). During the dry season, most animal life seeks refuge in riparian areas as they provide the primary means of shade and food resources (Frankie et al., 1974). Fires are common in the dry season and increasingly so with stronger and more frequent El Niño events due to climate change (Campos-Vargas & Vargas-Sanabria, 2021; Perry et al., 2012). Additionally, human disturbance persists year-round at Lomas through agriculture, mining, poaching, and logging (Quesada & Stoner, 2004; Stoner & Timm, 2004; Jacobson, personal communication).
Data Collection
We collected data on the movement trajectories of capuchin groups from September 2009 to March 2020 by using handheld Garmin GPSmap Series units (62 s, 64, 64 s, 66sr) clipped on or placed in researcher backpacks. Researchers followed capuchin groups from dawn until dusk recording the groups’ trajectory over the period when capuchins are expected to be active. During search days, researchers initiated GPS recording upon encountering groups and continued until the groups reached their sleeping site. When researchers were not collecting behavioral data on specific individuals, they positioned themselves as close to the geometric center of the group as feasible. Researchers maintained GPS recording as long as at least some individuals remained within visual contact, typically with 1–20 m between the researcher and the animal. However, in situations where researchers lost contact due to difficult conditions or when transitioning to study different groups, researchers would conclude GPS recording prematurely. Inefficiency of early GPS models and satellite disconnection due to cloud cover, cliff topography, or dense canopy also disrupted GPS data collection.
As is common in field primatology studies, movement data collection is somewhat opportunistic, as behavioral data collection protocols determine which group to follow, as well as when and how frequently. Once the behavioral data collection priorities were fulfilled for one group, data collection teams switched to another group. The time spent consecutively with any one group ranged between 1 and 22 days (mean 2.49), depending on the amount of behavioral data needed, visibility, and whether or not the researchers lost contact with the monkeys. We cleaned all tracking data using reproducible scripts in the software environment R (R Core Team, 2022). We also wrote automated functions which flagged tracks outside of the typical study area or data collection period. We visualized tracks with the mapview package (Appelhans et al., 2022) to manually identity, flag, and remove erroneous points. Errors could result from satellite issues or researchers forgetting to turn off their GPS units once they left a focal group.
In our full dataset, there are a total of 3,086 tracks, including 1,937,900 recorded locations. 1,902 (62%) of the daily tracks are at least 10 h in duration, and 2,555 (83%) are at least 5 h. We programmed GPS units to collect locations at one fix per 5 min between 2009–2012. When GPSs were upgraded in 2013, they began collecting at one fix per 30 s, which remains the same today. While we maintained the original sampling rates to measure fine-scale movement patterns, such as daily path length, for the purposes of this study, we adjusted the sampling rate to one fix per 30 min to manage computational costs during home range estimation. After changing the sampling rate, our dataset includes 65,645 recorded locations, encompassing roughly 25,000 observation hours across 11 groups from 2009 to 2020 (Fig. 2).

Temporal representation of handheld GPS tracking data collected from 11 groups of white-faced capuchins at the Lomas Barbudal Monkey Project in Costa Rica, September 2009 to March 2020. Colored boxes show six near-continuous segments of data (i.e., “complete segments”) selected from the total dataset to be thinned to create varying sampling regimes. Each vertical line shows the time sampled in a single day, with a maximum of 13 possible tracking hours (or 26 locations collected at a 30-min sampling rate). Group name is provided on the right side of the figure. Figure created using code from (Campos et al., 2014).
There were six cases where specific groups were followed almost continuously for long periods of 2 to 4 months because of concurrent research projects. These intervals provide ideal subsets of the data to explore the impact of irregular sampling and small sample sizes on home range estimation. We subsampled these data to create sampling regimes that varied in total duration, regularity of sampling effort, and volume of data.
Sampling Regimes
We chose six high-quality segments (hereafter referred as “complete segments”) from five different capuchin groups (two of the segments came from one group; the rest were from different groups), in which the data were collected almost continuously over multiple months. The data from these segments were collected over a period of no less than 50 days (with a maximum of 102 days), during which the data were recorded nearly continuously. We thinned each complete segment to generate ten alternative sampling regimes per complete segment, totaling 60 different regimes (Fig. 3). We thinned five of the ten sampling regimes created from each complete segment by removing days from either the beginning, the end, or both, thereby ensuring that these regimes maintained nearly continuous monitoring effort. We refer to these thinned regimes as “concentrated sampling regimes.” We thinned the other five regimes by randomly removing days to create irregular sampling gaps. We refer to these regimes as “spread sampling regimes.” Across the 60 sampling regimes, 30 were concentrated and 30 were spread. The number of days (and approximately the amount of locations) were held constant across concentrated and spread sampling regimes so that both spread and concentrated regimes have either 30, 20, 10, 6, or 3 days, corresponding to approximetely 780, 520, 260, 156, and 78 recorded locations, respectively. Each sampling regime is given a sampling regime ID denoting whether it is concentrated (C) or spread (S) followed by the number of days in the sampling regimes (e.g., S20).

Temporal representation of sampling regimes created by thinning near-continuous segments of data (i.e., “complete segments”) collected from white-faced capuchins at the Lomas Barbudal Monkey Project in Costa Rica, September 2009 to March 2020. The top row of each plot (labelled “all”) shows the total data from the complete segment. The following 10 rows of each plot depict different sampling regimes thinned from their respective complete segment, which are labelled with a sampling regime ID. “C” labels indicate concentrated data. “S” indicates spread data. Numbers indicate days in the sampling regime.
Home Range Estimation
We computed home range estimates using the AKDE method implemented in the ctmm package (Calabrese et al., 2016) in R (R Core Team, 2022). The ctmm package leverages advances in continuous-time movement models to provide a suite of tools for generating UDs (among other downstream analyses) while accounting for the wide range of autocorrelation structures present in most modern tracking datasets as well as the option to model GPS error. We employ the “weights = TRUE” option in the akde function to incorporate irregular data. This option assigns higher weights to under-sampled time periods and lower weights to over-sampled time periods (Fleming et al., 2018). Furthermore, we address location error by incorporating an informative prior with a mean of 20 m and 2 degrees-of-freedom. This prior distribution provides a credible interval of approximately 7 to 33 m, which informs our movement models about the potential error associated with the location estimates (Fleming et al., 2020). The inclusion of this prior accounts for satellite error, error caused by variation in group spread, and handheld GPS position relative to the capuchin group center. We detail ctmm analysis for home range estimation and provide an example workflow to make it easy to replicate the analyses with one’s own data in Appendix 1. Then, we show how we applied this method to the 60 sampling regimes for this study in Appendix 2.
Performance of Sampling Regimes for Home Range Estimation
To evaluate the performance of the 60 sampling regimes—and thus the impact of different aspects of sampling design—we compared each home range estimate against the data from the full time period (i.e., complete segments). While the biological home range cannot be known with certainty, we assume that estimates that accurately represent the data from the complete segments are more likely to be closer to the biological home range.
We defined performance as the proportion of the recorded GPS locations from the complete segments that fall within the boundaries of the 95% UD home range estimates calculated from the sampling regimes. This measure is hereafter referred to as “performance” or “performance score.” Because the 95% UD is an estimate of the area in which there is a 95% probability of finding the animal, a perfect performance score is 0.95, indicating that 95% of the total locations from the complete segment fell within the HR estimate. Also, because data from the sampling regimes represents a portion of the data within the complete segments, it is expected that performance scores should not deviate substantially from the optimal value of 0.95. Thus, performance scores that deviate below 0.90 can be viewed as exceedingly poor.
To examine the relationship between key sampling characteristics (e.g., number of locations, number of weeks, and data irregularity or continuity) and home-range performance, we employ binomial generalized linear mixed models (GLMMs) implemented using the brms package (Bürkner et al., 2023). Our number of successes was the number of locations from the complete segment that fell within the 95% AKDE of each sampling regime, whereas the number of trials was the number of locations overall in the complete segment. Our initial model uses a binary predictor variable that indicates whether the data is concentrated or spread to predict the performance score as the response variable. In contrast, our second model predicts the performance score based on the absolute sample size, which is indicated by the number of recorded locations (collected at a sampling rate of 30 min per location). Finally, our third model predicts performance based on the number of weeks, which is a measure of temporal coverage, quantifying both the length of the sampling window and the number of unique time periods represented within it. We included an interaction between the predictors and the binary variable indicating spread or concentrated data in the last two models, and all models have varying slopes and intercepts per group. We assessed the fit of our statistical models by employing posterior predictive checks by using the bayesplot package (Gabry et al., 2022). Posterior predictive checks evaluate model fit by comparing the observed data to simulated data from the posterior predictive distribution of the outcome variable inferred from the model (Rubin, 1984).
Finally, we compared the effects of increasing weeks versus increasing locations on the performance score. We did this by first z-score standardizing the number of weeks and locations in each regime. Thus, one standardized unit is equivalent to one standard deviation away from zero. Next, we calculated the instantaneous slopes (or first derivatives) of the model predictions across various standardized units of weeks and locations. This is a way of measuring the rate of increase (or effect size of increasing one standardized unit of weeks or locations on the performance score) at different levels along the posterior prediction curve. We chose three different standardized numbers (− 1.30, − 0.55, and 0.20) that designate three levels (low, medium, and high) and are meant to be representative points across the possible values of standardized weeks and locations. These three standardized numbers correspond to 21, 203, and 385 locations and 1, 3, and 6 weeks.
Effective Sample Size
We analyzed estimates of the effective sample size, which is measured as the number of statistically independent locations within the sample (Fleming et al., 2019). The effective sample size is proportional to the mean number of times the animal reverted back toward the center of its home range (Fleming et al., 2019) or the mean number of times the animal crossed the linear extent of its home range (Fleming & Calabrese, 2017). It is estimated by dividing the sampling time (T) by the time-lag between locations required for independence (τ), which also corresponds to the approximate average home range crossing timescale (Fleming & Calabrese, 2017; Silva et al., 2021). The effective sample size provides more information on spatial variance than the number of observed locations (i.e., absolute sample size) (Silva et al., 2021), and therefore is a better indicator of the reliability of home range estimates (Fleming et al., 2019; Noonan et al., 2019). See Appendix 4 for a comparison of absolute sample size and effective sample size.
As τ (i.e. the average home range crossing timescale) is integral to the calculation of the effective sample size, we compared estimates of τ from the movement models fitted to the 60 different sampling regimes to those estimated from the movement models fitted to the six complete segments. This procedure gives us a better understanding of how estimates of the effective sample size may be biased by missing data, which has important implications for the shape of the home range contours and the certainty of area estimates. If τ is underestimated, effective sample sizes will be positively biased, which results in overconfident and misleading home range estimates. Conversely, overestimating τ will result in negatively biased effective sample sizes, leading to exceedingly large uncertainties.
We consider the values of τ taken from the movement models fit to the complete segments as more reliable compared to estimates derived from the sampling regimes. This is because they are based on continuous data collected over extended periods, which effectively capture the timescale necessary for capuchin groups to fully use their entire range (determined by field-based approximations). We used these values to estimate reliable effective sample sizes for each sampling regime by dividing the sampling times (T) of the regimes by the τ values taken from the movement models fit to the complete segments. Subsequently, we contrasted these estimates to the effective sample size estimates derived from the movement models fit to the sampling regimes. Evaluating the discrepancy between these estimates offers insights into potential sources of biases in τ (and consequently the effective sample size), stemming from variations in the sampling regimes.
Stationarity and Temporal Scale of Sampling Regime
To examine the long-term stability of home ranges and identify suitable time scales for estimating them in our longitudinal dataset we conducted a case study focusing on two groups: AA and RR. We calculated a single annual home range for each group (2014 for AA and 2012 for RR) in which the data met our criteria for adequate home range estimation performance, as determined from our evaluation of the effects of sampling elements. Subsequently, we investigated changes in space use over four years by examining whether location data from different time periods, not included in the data used for home range estimation, fell within the boundaries of the home range. Specifically, we analyzed the proportion of locations from the previous year, the subsequent year, and the subsequent next year that fell within the mean 95% UD boundary of the home range estimate. This analysis allowed us to assess the consistency of the home ranges over time. Additionally, we visually assessed whether data from different seasons represented distinct portions of the annual home range. This approach enabled us to evaluate the temporal consistency of home ranges and determine the feasibility of segmenting the data based on specific time periods, such as years or seasons.
Ethical Note
The study was entirely observational; GPS devices were carried by observers instead of attached to the animals. All protocols were approved by UCLA’s Animal Care Committee (protocol 2016–2022), and all necessary permits were obtained from SINAC and MINAE (the Costa Rican government bodies responsible for research on wildlife) and renewed every 6 months during the course of the study; the most recent scientific passport number being #117–2019-ACAT and the most recent permit being Resolución # M-P-SINAC-PNI-ACAT-072–2019. This research follows the Animal Behavior Society’s Guidelines for the Use of Animals in Research (ASAB Ethical Committee/ABS Animal Care Committee, 2023).
Data Availability
The reproducible code and data with shifted coordinates are available here: https://doi.org/10.17617/3.IFOIIN (Jacobson, et al., 2023). Coordinates were shifted to safeguard the capuchin population. Raw data can be requested here pending permission: https://www.movebank.org/cms/webapp?gwt_fragment=page=studies,path=study2995950493.
Conflict of Interest
The authors declare no financial or non-financial conflicts of interest.
Results
Spread Sampling Outperforms Concentrated Sampling
Spread sampling regimes performed better on average, estimating home ranges that more closely approximated the target performance score of 0.95 (posterior median = 0.93, 95% credible interval: 0.87–0.96). Concentrated sampling regimes estimated home ranges that were more consistently negatively biased (posterior median = 0.85, 95% credible interval: 0.61–0.91) (Fig. 4a). Additionally, spread sampling regimes were more robust than concentrated sampling regimes to low quantities of recorded locations and weeks (Fig. 4b and c). Generally, home range estimates for concentrated sampling regimes performed worse with fewer locations and weeks, but their confidence intervals remained consistently narrow. In contrast, the performances for spread sampling regimes did not substantially decrease with fewer locations and weeks, but the confidence intervals around their home range estimates widened (Fig. 5). Based on our findings, we established that for spread data, sampling regimes should encompass a minimum of 100 locations and span at least 5 weeks. For concentrated data, sampling regimes necessitate a minimum of 500 locations and 5 weeks.

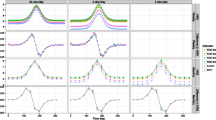
Model predictions of home range estimation performance predicted by characteristics of sampling regimes for white-faced capuchin movement data collected at the Lomas Barbudal Monkey Project in Costa Rica, September 2009 to March 2020. (A) Plot showing the home range estimation performance score predicted by whether the data was concentrated (blue) or spread (orange). Within these two categories, raw data are shown on the left, and posterior point intervals are shown on the right. Posterior point intervals describe the median and 66% and 95% credible intervals of the posterior distribution. Model predictions for the effect of number of locations (B) and number of weeks (C) within the sampling regimes on performance score. Horizontal dashed line indicates optimal performance score of 0.95. Dark solid lines are the mean posterior predictions; lighter lines (although hard to see as they are very close to the mean) are 200 randomly sampled posterior predictions. Plots visualizing varying effects per group are shown in Figs. 1, 3, and 5 in Appendix 3.

Home-range estimates derived from ten varying sampling regimes created by thinning a near-continuous portion of the handheld GPS dataset from a single group (CE) of white-faced capuchins at the Lomas Barbudal Monkey Project in Costa Rica, July to October 2017 (Appendix 2 for all groups). The dark lines indicate the mean 95% utilization distribution contour and the dotted lines indicate the 95% confidence intervals. The open yellow points indicate the locations that were thinned from the complete segments and the filled green points indicate the locations that remained in the sampling regimes. The top row shows the concentrated sampling regimes and the bottom row shows the spread sampling regimes. Despite poor performance, home range estimates generated from sampling regime IDs C20, C10, C6, and C3 show narrow confidence intervals, suggesting biased and misleading effective sample sizes.
More Data is Not Always Better
Increasing the temporal coverage (measured by the number of weeks) in sampling regimes had a greater positive effect on home range estimation performance compared to increasing the absolute sample size (measured by the number of recorded locations). When concentrated sampling regimes had low absolute sample sizes and temporal coverages (low = − 1.3 SD corresponding to 21 locations or one week), a + 1 SD increase in locations (243 locations) improved performance of home range estimates by approximately 23% (Fig. 6a). Meanwhile, a + 1 SD increase in weeks (3 weeks) boosted estimation performance by approximately 30% (Fig. 6c). This implies that collecting as few as three locations on a weekly or less frequent sampling schedule can lead to better performance improvements than collecting 243 locations at a continuous 30-min sampling rate.

Model estimates of the instantaneous slope coefficients (i.e., first derivatives) for increasing locations and weeks in sampling regimes on performance of home range estimates of white-faced capuchin groups at the Lomas Barbudal Monkey Project in Costa Rica, September 2009 to March 2020. Plots depict a combination of posterior densities, mean point estimates, and credible intervals (80 and 95%) for the instantaneous slope coefficients at varying quantities of weeks and recorded locations. Instantaneous slope coefficients represent the effect size of increasing 1 standard deviation in weeks or locations on the home range estimation performance score. Plots A and C (Blue-purple colors) represent concentrated sampling regimes. Plots B and D (orange-yellow) represent spread sampling regimes. Darker colors represent smaller quantities. Lighter colors represent greater quantities of weeks or locations.
With larger quantities of data already present in sampling regimes, adding more weeks and/or locations had less impact, because the rate of improvement slowed down as it approached the optimal performance value of 0.95. For instance, when concentrated sampling regimes had medium quantities of locations and weeks (medium = − 0.55 SD corresponding to 3 weeks or 203 locations), a + 1 SD in weeks and + 1 SD in locations both improved performance by approximately 17%. At high quantities (high = 0.2 SD corresponding to 6 weeks or 385 locations), a + 1 SD increase in weeks improved performance by approximately 8% and a + 1 SD increase in locations improved performance by approximately 10%.
We found a similar trend for spread sampling regimes: increasing the number of weeks improved performance more than increasing the number of locations (Fig. 6b and d). However, the effects of increasing both weeks and locations were much smaller compared with concentrated sampling regimes, because spread sampling regimes already had performance scores relatively close to optimal even with low quantities of locations and weeks.
Concentrated Sampling is Prone to Bias in the Effective Sample Size
The absence of crucial data can result in skewed estimations of the effective sample size, especially for concentrated sampling regimes. Of the 60 sampling regimes, 12 concentrated sampling regimes and six spread sampling regimes showed significantly biased estimates (Fig. 7). The most substantial biases occurring in groups CE and FL, where several sampling regimes with seemingly adequate absolute sample sizes (~ 300–500 locations) and total time sampled (~ 10–20 full tracking days) had very large biases (e.g., off by effective sample sizes of approximately 50–150). These biases resulted in home range estimates with high levels of certainty but very low performance scores (Fig. 5).

Effective sample sizes of various sampling regimes collected from white-faced capuchin groups at the Lomas Barbudal Monkey Project in Costa Rica, September 2009 to March 2020. Each panel shows the effective sample size estimates of each sampling regime within a group (Estimate effective sample size: open circles indicate the means and dashed lines indicates 95% confidence intervals), and a comparison with what the effective sample size should be if the home range crossing time was informed by the complete segments (Reliable effective sample size: closed circles indicate the means and solid lines indicates 95% confidence intervals). Colors indicate whether the sampling regime had concentrated (blue) or spread (yellow) data.
Capuchin Space use Varies Across Years and Seasons
In our case study, assessing the stability of home ranges and identifying suitable temporal scales for home range estimation, we observed distinct trends in the space-use patterns of groups RR and AA. Locations of group AA were relatively stationary across the 4-year period, although there were some excursions into areas outside the 2014 home range contour in 2015. Group RR displayed stability for two consecutive years, as evident from a substantial proportion of observations the previous year in 2011 falling within the home range contour from 2012. However, over the subsequent 2 years (2013 and 2014), there was noticeable drift in the observed locations (Fig. 8).

Annual home-range estimates for two groups of white-faced capuchins at the Lomas Barbudal Monkey Project in Costa Rica (2011–2016) plotted alongside data from the preceding, subsequent, and next subsequent year. Dark lines indicate the mean 95% utilization distribution contour for 2014 (group AA) and 2012 (group RR). Dotted lines indicate the corresponding 95% confidence intervals.
For group AA, we estimated the home range for 2014 and found that 99% (95% CI: 0.985–0.996) of the locations from 2013 fell within the mean 95% UD boundary. Meanwhile, 88.7% (95% CI: 0.824–0.949) of the locations from 2015 and 96% (95% CI: 0.887–0.988) of the locations from 2016 were within the UD boundary. For group RR, we estimated the home range for 2012 and found that 98.4% (95% CI: 0.949–0.997) of the locations from 2011, 89.1% (95% CI: 0.830–0.932) of the locations from 2013, and 86.2% (95% CI: 0.842–0.900) of the locations from 2014 fell within the UD boundary. Furthermore, group RR showed consistent space-use patterns between the wet and dry seasons, whereas group AA showed potential seasonal variations in certain years.
Discussion
Our study shows that temporal coverage is a more important factor than the raw quantity of data for home range estimation. Sampling protocols that capture greater space-use variability by distributing location data over prolonged durations yield the most dependable home range estimates. Technological advancements in handheld GPS devices have facilitated the collection of location data with remarkable frequency, allowing measurements to be obtained at intervals as short as every second (Garmin Customer Support, n.d.). The enhanced capabilities of these devices, characterized by faster sampling rates and small error (~ 3 m), have paved the way for new opportunities to study the movement patterns of habituated animals in unprecedented detail. However, our findings indicate that, when examining home range estimates, faster sampling rates may not necessarily yield improved results, as locations collected quickly in succession tend to contribute redundant information at the home range scale.
We employed a relatively coarse sampling rate of one location every 30 min. The estimated time between locations necessary to ensure independence, known as range crossing time, averaged around 12 h. This duration, although short compared with other animals, such as big cats (Karelus et al., 2021; Morato et al., 2016), ungulates (Calabrese et al., 2016; Fleming et al., 2015b), and other large mammals (Noonan et al., 2020), meant that we obtained new and independent information about the home range approximately once every 24 consecutive locations. However, we found that further information about the range was provided when locations were separated by week-long intervals. These findings highlight the importance of prioritizing the collection of location data with larger time intervals between measurements.
Encouragingly for researchers employing handheld GPS data to estimate home ranges, our study revealed that sporadic gaps in data collection do not inherently compromise home range estimation performance. In fact, sampling regimes that sacrificed continuous observation for greater temporal coverage consistently outperformed sampling regimes that were continuous but concentrated into short time periods, even when effective sample sizes were equal. The enhanced performance of spread-out sampling strategies stems from longer total sampling durations providing capuchin groups more time to fully use their home range. Despite potential sampling gaps leading to missed range crossings, irregular data distributed over longer periods captured more variation in space use. Consequently, sampling regimes with extended durations should provide a more comprehensive representation of an animal’s overall space use, provided that crucial changes in ranging behavior are not missed due to sampling gaps.
Concentrated sampling strategies occasionally yielded positively biased effective sample sizes, leading to overconfident home-range estimates. These sampling regimes failed to capture variations in underlying movement processes, specifically the sudden shifts occurring within the home range. We observed that when capuchin groups temporarily confined their movements to specific subareas within their home range, the movement models fitted solely to the data from these specific periods yielded an overestimation of the effective sample size. This is because the capuchin groups repeatedly traversed this smaller area, which led to underestimated, home-range crossing times and overestimated effective sample sizes. As a result, the overestimated effective sample sizes constrained the confidence intervals, creating the illusion of high-quality home-range estimates, when in reality they were too small (Fig. 5, C20, C10, C6, and C3). This highlights the importance of examining home range estimate outputs in the context of the species’ biology, and not solely relying on statistical criteria.
The influence of the movement and foraging behavior of the study species is likely a key determinant in the susceptibility of handheld GPS data to bias in the effective sample size. Species, such as frugivorous primates that forage on ephemeral and patchily distributed resources, must differentially allocate time across their home range so that search efforts align with when and where resources are most productive (Altmann, 1974; Janson, 2019). Frugivores may do this by foraging for extended periods in small areas (Oppenheimer, 1968) and then shifting within their home range in response to changing resource availability (Campos et al., 2014). Due to frugivores’ sudden changes in space use, estimating their home-range crossing timescale poses challenges. It often requires more time to accurately summarize compared with folivorous primates, which usually move in more constant and predictable patterns, as their food resources are more evenly distributed (Reyna-Hurtado et al., 2018). However, even folivorous species, such as red colobus monkeys (Piliocolobus tephrosceles), have been observed to deplete food patches in an irregular manner as well (Snaith & Chapman, 2005).
Our examination of home range stability over extended periods through the case studies involving group AA and RR revealed considerable variation in space-use patterns over years and potentially across seasons. As a result, we determined that the most suitable temporal scales for estimating home ranges across our full longitudinal dataset are annual and seasonal scales. These scales strike a balance; they are long enough to capture the entire home range used by groups, while still allowing important changes to be discerned. Applying criteria based on our analysis of sampling elements, specifically requiring spread data to encompass at least 5 weeks across each segment and consist of at least 100 locations, we estimated annual and seasonal home ranges across the entire dataset from 2009 to 2020. Among a total of 117 annual and 212 seasonal segments encompassing 11 groups, we identified 97 annual and 127 seasonal segments that satisfied our criteria for reliable home range estimation.
Temporal Scale of Sampling Regimes
A crucial challenge in home range estimation revolves around determining the appropriate temporal scale. This involves ensuring that the chosen scale is sufficiently long to encompass the entire home range used by the animal. By doing so, we can ensure that variations in home range estimates carry biological significance rather than being artifacts of sampling. Additionally, when investigating temporal changes, it is important to strike a balance where the temporal scale is not excessively long, thereby obscuring biologically meaningful changes in space-use patterns. As static representations of animal space use, home range estimates possess inherent limitations in detecting dynamic movement changes (Benhamou & Riotte-Lambert, 2012). Therefore, the decision of temporal scale and where to segment the data becomes critically important.
Several longitudinal studies have shown remarkable stability in primate home ranges over years, decades, and even across generations (Janmaat et al., 2009; Jolly & Pride, 1998; Poirier, 1968; Singleton and van Schaik, 2001). In group AA, we also observed a relatively long period of home-range stability of at least 4 years (Fig. 8). When home ranges remain stationary for prolonged periods, expanding the sampling window beyond the point of achieving a sufficient effective sample size is expected to have minimal impact on the estimation of the home range (Fleming et al., 2014b). Consequently, diffusion rates and/or the estimated home range area should have reached a plateau, indicating an adequate effective sample size has been reached and that further sampling does not result in more diffusion and/or size augmentation.
One key consideration for sampling design is determining the duration required to reach an adequate effective sample size, which depends on the specific timescale for the animal to fully use its entire home range. To achieve this, ten independent locations (i.e., observed home range crossings) are generally considered adequate for autocorrelated kernel density estimation (Fleming et al., 2019; Silva et al., 2021). Consequently, it is essential to ensure that the temporal scale chosen for home range analysis is at least as long as the timeframe necessary to meet this requirement (refer to Appendix 1 for a detailed walkthrough of this analysis). By adhering to this practice, researchers can establish a solid foundation for making meaningful comparisons across various species and sampling designs (Fleming & Calabrese, 2017).
A key challenge is that home ranges are not always stationary. For instance, group RR gradually shifted their range over a 4-year period. Other notable examples include seasonal shifts observed in Yunnan snub-nosed monkeys (Rhinopithecus bieti) (Li et al., 2001), shifts in response to habitat loss observed in vervet monkeys (Cercopithecus aethiops) (Isbell et al., 1990), and home range shifts following demographic changes observed in grey-cheeked mangabeys (Lophocebus albigena) (Janmaat et al., 2009). Because one of the critical assumptions underlying the range distribution is the stationary nature of the home range (Silva et al., 2021), it is important to segment the data before a change in stationarity occurs (Dettki & Ericsson, 2008), thereby estimating separate home ranges during these distinct periods.
An alternative and more conventional strategy involves reporting home-range estimates across various standardized temporal scales, such as monthly, quarter-annually, half-annually, and annually, because the outcomes can differ depending on the duration of these time periods (Börger et al., 2008; Campos et al., 2014; White & Garrott, 1990). While these scales are somewhat arbitrary, this approach ensures that important spatiotemporal variations in home range patterns are captured (Campos et al., 2014). Nonetheless, when an animal’s home-range crossing time is relatively long, using shorter time scales, such as monthly or quarter-annually, may yield estimates that align more closely with the occurrence distribution. Thus, area estimates will be underestimated if the intended target was the range distribution. If an adequate effective sample size is not attained, using arbitrary scales can introduce bias, particularly in cross-species comparisons when species differ in their home range crossing times (Fleming & Calabrese, 2017). Incorrect reporting of such results can mislead meta-analyses (Noonan et al., 2020) or conservation plans (Brashares et al., 2001; Gaston et al., 2008). A justified approach, therefore, is to exclusively report estimates as the home range when temporal scales are long enough to ensure an adequate effective sample size and thus represent the range distribution. Additionally, in many cases, it may be appropriate to report home range estimates across temporal scales that hold biological significance, such as across seasons.
Species-level Differences in Home-Range Crossing Time
The estimated time intervals between recorded locations, ensuring their independence, bear biological significance, as they are directly proportional to the timescale of home range crossings. Hence, these intervals dictate the duration needed for sampling strategies to adequately capture the biological home range. When devising sampling protocols, it is crucial to acknowledge the considerable variation in the time taken by individuals or groups to traverse their respective home ranges, as this varies across different species and ecological contexts. Home ranges tend to be larger for frugivores than folivores (Milton & May, 1976) and large-bodied species compared to small-bodied species (Terborgh & Janson, 1986). While larger home ranges generally translates into longer home-range crossing times (Noonan et al., 2020), this may not always be the case, particularly when movement speeds are variable between species. For instance, across mammals, carnivores typically have larger home ranges than herbivores, but herbivores tend to have longer home range crossing times (Noonan et al., 2020), presumably due to their slower and more diffusive search patterns for food (Reyna-Hurtado et al., 2018).
Among primates, group-living species, such as gray langurs (Presbytis entellus) (Jay, 1965), chimpanzees (Pan troglodytes) (Nishida, 1968), and yellow baboons (Papio cynocephalus) (Altmann & Altmann, 1970) tend to have much longer home range crossing times than solitary species (Milton & May, 1976). Territorial species, such as gibbons (Hylobatidae) (Cheney, 1986), red-bellied titi monkeys (Callicebus moloch) (Mason, 1968), and vervet monkeys (Chlorocebus pygerythrus) (Reyna-Hurtado et al., 2018), generally have much shorter home range crossing times than non-territorial species as they must traverse across their home range rapidly to defend their borders against neighboring conspecific groups (Mitani & Rodman, 1979). However, some nonterritorial species also may move rapidly across their range, such as the highly mobile squirrel monkey (Saimiri oerstedi), which can use 75–90% of its home range in a single day (Baldwin & Baldwin, 1972). For reference of how home-range crossing time translates to appropriate sampling design, the capuchin groups in our study had a mean home range crossing timescale of 12.5 (95% CI: 9.4–16.7) hours, which scales to about 1 day considering that they very rarely move at night. To reliably estimate the home range, we found that sampling regimes should include approximately 100–600 locations distributed over at least 5–7 distinct weeks. A similar sampling duration (45–136 days) was required in a study on giant anteaters (Myrmecophaga tridactyla), where the average home range crossing time was approximately 2 days (Giroux et al., 2021). In contrast, a study on elongated tortoises (Indotestudo elongata) estimated a home range crossing time of 17 days on average (although sometimes much longer for particular individuals), and even with 1 year of consistent sampling, researchers were not able to achieve adequate effective sample sizes for several individuals (Montano et al., 2021). Studies on Mongolian gazelles have shown estimated range crossing times of around 5–6 months (Fleming et al., 2014a). Given they live an average of 4–8 years (Olson et al., 2014), attaining adequate effective sample sizes is challenging within an individual’s lifespan (Fleming et al., 2019).
Relevance of Sampling Regime for Conservation
In our study, effective sample size bias was most problematic for groups that had the most fragmented habitats from roads and pastures (CE and FL group). Compared with other groups, CE and FL required more locations and weeks to reach the adequate home-range estimation performance. These greater sampling requirements may be because individuals in these groups perceive crossing the home range as riskier (Frid & Dill, 2002) or more energetically expensive (Huang et al., 2017). Thus, it may be favorable to deplete local resources before commuting long distances. Human-related disturbances have restricted and reduced the movements of mammals (Tucker et al., 2018), including primates (Pereira et al., 2022), across the globe. However, such disturbances may only delay movements until individuals are desperate and moving between fragmented habitats becomes essential (Bonelli et al., 2013; Lens & Dhondt, 1994; Panzacchi et al., 2013; Schtickzelle et al., 2006). If habitat fragmentation delays movements across animal home ranges, then gathering sufficient data for home range estimation may take more time than expected. Sampling regimes that do not provide enough time for animals to cross between fragments will underestimate their home range crossing time and have highly biased effective sample sizes.
It is worrying that species of conservation concern often are prone to biased home-range estimates. High-risk species, such as large-bodied species with long home-range crossing times (Cardillo et al., 2005), are especially susceptible to underestimated home range areas due to challenges in obtaining sufficient effective sample sizes (Noonan et al., 2020). Similarly, our findings suggest that animals that live in fragmented habitats are prone to effective sample size bias. This bias can lead to both overconfident and underestimated home range estimates, which raises significant conservation concerns. Underestimated home range estimates may result in protected areas that are insufficient for population survival and reproduction (Brashares et al., 2001; Gaston et al., 2008). Therefore, it is crucial that sampling for home range estimation be designed carefully around the ecological context and behavior of the study species, especially when these results inform conservation initiatives.
Recommendations for Sampling Design
Based on our findings, we advise biologists to design appropriate sampling regimes (balancing effort with temporal coverage) by considering (a) the target distribution we are aiming to estimate, (b) what we should be aiming for in terms of “good quality” data, and (c) how we can tell “how much is enough?”.
When we are aiming to estimate the home range according to Burt’s original definition, we are targeting the range distribution. This is the space needed by the animal to survive and reproduce, which includes both the space used during the sampling period and the space that will eventually be used in the future given a consistent underlying movement process (Alston et al., 2022). If we are targeting the occurrence distribution, then we are only interested in the space used during the sampling period, which essentially is an attempt to fill in the gaps between observed locations. The best quality data for the occurrence distribution are therefore when the sampling rate is as high as possible, as this will produce estimates closest to the animals’ actual movement path (Börger et al., 2020). When the range distribution is the target, the best quality data is when the effective sample size, or number of independent location data points, is maximized (Fleming & Calabrese, 2017). As we have shown, this is best accomplished by increasing the temporal coverage of sampling, rather than the sampling rate. With this in mind, we recommend the following guidelines for estimating the range distribution from handheld GPS data:
-
1.
Maximize independent locations by spreading data across an adequate time period to cover the complete home range of study animals (Fleming et al., 2015b).
-
2.
To correct effective sample size bias, account for species' home range crossing time. Use a pilot study or the Movedesign app (Silva et al., 2023) if a rough estimate is unknown.
-
3.
When labelling results as home ranges, avoid temporal scales, such as “weekly” or “monthly.” Choose time scales aligned with species’ biology, such as seasonal sampling, or sufficiently long and comparable intervals, such as annual sampling, to ensure meaningful comparisons across studies (Fleming & Calabrese, 2017).
-
4.
Integrate GPS data collection with other priorities like behavioral and phenology data collection. Periodically rotate among multiple groups or individuals if necessary, allowing for adequate temporal coverage of all study animals.
-
5.
Acknowledge the limitations of handheld GPS data, especially if missing data are a result of researchers being unable to track primates in specific areas or during certain periods. In such cases, home range analysis may not be suitable.
-
6.
Check data sufficiency using variogram regression (Appendix 1; Fleming et al., 2014b) or by plotting home range area over time/sampling effort to see if it has plateaued (Odum & Kuenzler, 1955).
-
7.
If the data meet the requirements for home range estimation, use AKDE (Appendix 1 for a detailed walkthrough) as it considers autocorrelation and the range distribution (Fleming & Calabrese, 2017). Newer versions integrate barriers and habitat components (Alston et al., 2023) to refine estimates.
Conclusions
GPS data collection is a component of almost all modern primate field studies (Janmaat et al., 2021), and home-range estimates are one of the most sought-after outputs of these data. Nonetheless, the reliability of home range estimates may be compromised when the sampling effort fails to capture the full extent of the biological home range or through inappropriate application of statistical approaches. This is concerning given that home range estimates play a crucial role in ecological inference and conservation decision-making. At present, we lack an understanding of how ranging patterns are influenced by enduring factors such as climate change, environmental disturbance, demographics, and social learning. Given that primate studies regularly gather longitudinal data on movement, environmental variables, behavior, and demographics, they may be in an exceptional position to address these inquiries and connect them to fitness. Nonetheless, our study has revealed that the usefulness of handheld GPS data in estimating home ranges depends on whether the sampling regimes have adequate temporal coverage for the focal animals to use their entire home range. Adhering to sound scientific principles involves linking the data collection procedure to the specific process of interest. It is therefore necessary to take care when designing sampling protocols for home range estimation to ensure that they represent the biological home range of the species under investigation.
References
Abe H, Ueno S, Tsumura Y, Hasegawa M (2011) Expanded home range of pollinator birds facilitates greater pollen flow of camellia japonica in a forest heavily damaged by volcanic activity. In Y. Isagi & Y. Suyama (Eds.), Single-Pollen Genotyping (pp. 47–62). Springer. https://doi.org/10.1007/978-4-431-53901-8_5
Alston, J., Fleming, C. H., Kays, R., Streicher, J. P., Downs, C. T., Ramesh, T., Reineking, B., & Calabrese, J. M. (2023). Mitigating pseudoreplication and bias in resource selection functions with autocorrelation-informed weighting. Methods in Ecology and Evolution, 14(2), 643–654. https://doi.org/10.1111/2041-210X.14025
Alston, J., Fleming, C., Noonan, M., Tucker, M., Silva, I., Folta, C., Akre, T. S. B., Ali, A., Belant, J., Beyer, D., Blaum, N., Böhning-Gaese, K., de Paula, R. C., Dekker, J., Drescher-Lehman, J., Farwig, N., Fichtel, C., Fischer, C., Ford, A., … Calabrese, J. (2022) Clarifying space use concepts in ecology: range vs. occurrence distributions. https://doi.org/10.1101/2022.09.29.509951
Altmann, J., & Altmann, S. A. (1970). African Field Research. Bibliotheca Primatologica, (12).
Altmann, S. A. (1974). Baboons, space, time, and energy. American Zoologist, 14(1), 221–248. https://doi.org/10.1093/icb/14.1.221
Appelhans, T., Detsch, F., Reudenbach, C., Woellauer, S., Forteva, S., Nauss, T., Pebesma, E., Russell, K., Sumner, M., Darley, J., Roudier, P., Schratz, P., Marburg, E. I., & Busetto, L. (2022). mapview: Interactive Viewing of Spatial Data in R (2.11.0) [Computer software]. https://CRAN.R-project.org/package=mapview
ASAB Ethical Committee/ABS Animal Care Committee. (2023). Guidelines for the ethical treatment of nonhuman animals in behavioural research and teaching. Animal Behaviour, 195, I–XI. https://doi.org/10.1016/j.anbehav.2022.09.006
Axel, A. C., & Maurer, B. A. (2011). Lemurs in a complex landscape: Mapping species density in subtropical dry forests of southwestern Madagascar using data at multiple levels. American Journal of Primatology, 73(1), 38–52. https://doi.org/10.1002/ajp.20872
Baldwin, J. D., & Baldwin, J. (1972). The Ecology and Behavior of Squirrel Monkeys (Saimiri oerstedi) in a Natural Forest in Western Panama. Folia Primatologica, 18(3–4), 163–184. https://doi.org/10.1159/000155478
Benhamou, S., & Riotte-Lambert, L. (2012). Beyond the Utilization Distribution: Identifying home range areas that are intensively exploited or repeatedly visited. Ecological Modelling, 227, 112–116. https://doi.org/10.1016/j.ecolmodel.2011.12.015
Bonelli, S., Vrabec, V., Witek, M., Barbero, F., Patricelli, D., & Nowicki, P. (2013). Selection on dispersal in isolated butterfly metapopulations. Population Ecology, 55(3), 469–478. https://doi.org/10.1007/s10144-013-0377-2
Börger, L., Dalziel, B., & Fryxell, J. (2008). Are there general mechanisms of animal home range behaviour? A review and prospects for future research. Ecology Letters, 11, 637–650. https://doi.org/10.1111/j.1461-0248.2008.01182.x
Börger, L., Fieberg, J., Horne, J., Rachlow, J., Calabrese, J., & Fleming, C. (2020). Animal home ranges: concepts, uses, and estimation. Population ecology in practice, 315–332.
Brashares, J. S., Arcese, P., & Sam, M. K. (2001). Human demography and reserve size predict wildlife extinction in West Africa. Proceedings of the Royal Society of London. Series B: Biological Sciences, 268(1484), 2473–2478. https://doi.org/10.1098/rspb.2001.1815
Brown, M., & Crofoot, M. (2013). Social and spatial relationships between primate groups. In: STERLING, Eleanor J., ed. and others. Primate ecology and conservation: a handbook of techniques (pp. 151–176). Oxford: Oxford University Press.
Bürkner, P.-C., Gabry, J., Weber, S., Johnson, A., Modrak, M., Badr, H. S., Weber, F., Ben-Shachar, M. S., Rabel, H., Mills, S. C., & Wild, S. (2023). brms: Bayesian Regression Models using “Stan” (2.19.0) [Computer software]. https://CRAN.R-project.org/package=brms
Burt, W. H. (1943). Territoriality and home range concepts as applied to mammals. Journal of Mammalogy, 24(3), 346–352. https://doi.org/10.2307/1374834
Calabrese, J. M., Fleming, C. H., & Gurarie, E. (2016). ctmm: An r package for analyzing animal relocation data as a continuous-time stochastic process. Methods in Ecology and Evolution, 7(9), 1124–1132. https://doi.org/10.1111/2041-210X.12559
Calhoun, J. B., & Casby, J. U. (1958). Calculation of home range and density of small mammals. Public Health Monograph, 55, 1–24.
Campos, F. A., Bergstrom, M. L., Childers, A., Hogan, J. D., Jack, K. M., Melin, A. D., Mosdossy, K. N., Myers, M. S., Parr, N. A., Sargeant, E., Schoof, V. A. M., & Fedigan, L. M. (2014). Drivers of home range characteristics across spatiotemporal scales in a Neotropical primate, Cebus capucinus. Animal Behaviour, 91, 93–109. https://doi.org/10.1016/j.anbehav.2014.03.007
Campos-Vargas, C., & Vargas-Sanabria, D. (2021). Assessing the probability of wildfire occurrences in a neotropical dry forest. Écoscience, 28(2), 159–169. https://doi.org/10.1080/11956860.2021.1916213
Cardillo, M., Mace, G. M., Jones, K. E., Bielby, J., Bininda-Emonds, O. R. P., Sechrest, W., Orme, C. D. L., & Purvis, A. (2005). Multiple causes of high extinction risk in large mammal species. Science (New York, N.Y.), 309(5738), 1239–1241. https://doi.org/10.1126/science.1116030
Cheney, D. L. (1986). Interactions and relationships between groups. In Smuts, B. B., Cheney D. l., Seyfarth R.M., & Wrangham R. W., (Eds.), Primate Societies (pp. 267–281). Chicago: University of Chicago Press. https://doi.org/10.7208/9780226220468-024
Cheyne, S. M., Capilla, B. R., K., A., Supiansyah, Adul, Cahyaningrum, E., & Smith, D. E. (2019). Home range variation and site fidelity of Bornean southern gibbons [Hylobates albibarbis] from 2010–2018. PLoS ONE, 14(7). https://doi.org/10.1371/journal.pone.0217784
Crabb, M. L., Clement, M. J., Jones, A. S., Bristow, K. D., & Harding, L. E. (2022). Black bear spatial responses to the Wallow Wildfire in Arizona. The Journal of Wildlife Management, 86(3), e22182. https://doi.org/10.1002/jwmg.22182
Crofoot, M. C. (2007). Mating and feeding competition in white-faced capuchins (Cebus capucinus): The importance of short- and long-term strategies. Behaviour, 144(12), 1473–1495.
Crofoot, M. C., Gilby, I. C., Wikelski, M. C., & Kays, R. W. (2008). Interaction location outweighs the competitive advantage of numerical superiority in Cebus capucinus intergroup contests. Proceedings of the National Academy of Sciences, 105(2), 577–581. https://doi.org/10.1073/pnas.0707749105
Desbiez, A. L. J., Kluyber, D., Massocato, G. F., Oliveira-Santos, L. G. R., & Attias, N. (2020). Spatial ecology of the giant armadillo Priodontes maximus in Midwestern Brazil. Journal of Mammalogy, 101(1), 151–163. https://doi.org/10.1093/jmammal/gyz172
Dettki, H., & Ericsson, G. (2008). Screening radiolocation datasets for movement strategies with time series segmentation. The Journal of Wildlife Management, 72(2), 535–542. https://doi.org/10.2193/2006-363
Dore, K. M., Hansen, M. F., Klegarth, A. R., Fichtel, C., Koch, F., Springer, A., Kappeler, P., Parga, J. A., Humle, T., Colin, C., Raballand, E., Huang, Z.-P., Qi, X.-G., Di Fiore, A., Link, A., Stevenson, P. R., Stark, D. J., Tan, N., Gallagher, C. A., … Fuentes, A. (2020). Review of GPS collar deployments and performance on nonhuman primates. Primates; Journal of Primatology, 61(3), 373–387. https://doi.org/10.1007/s10329-020-00793-7
Fieberg, J., & Kochanny, C. O. (2005). Quantifying home-range overlap: The importance of the utilization distribution. Journal of Wildlife Management, 69(4), 1346–1359. https://doi.org/10.2193/0022-541X(2005)69[1346:QHOTIO]2.0.CO;2
Fleming, C. H., & Calabrese, J. M. (2017). A new kernel density estimator for accurate home-range and species-range area estimation. Methods in Ecology and Evolution, 8(5), 571–579. https://doi.org/10.1111/2041-210X.12673
Fleming, C. H., Calabrese, J. M., Mueller, T., Olson, K. A., Leimgruber, P., & Fagan, W. F. (2014a). Non-Markovian maximum likelihood estimation of autocorrelated movement processes. Methods in Ecology and Evolution, 5(5), 462–472. https://doi.org/10.1111/2041-210X.12176
Fleming, C. H., Calabrese, J., Mueller, T., Olson, K., Leimgruber, P., & Fagan, W. (2014b). From fine-scale foraging to home ranges: A semivariance approach to identifying movement modes across spatiotemporal scales. The American Naturalist, 183, E154–E167. https://doi.org/10.1086/675504
Fleming, C. H., Drescher-Lehman, J., Noonan, M., Akre, T., Brown, D., Cochrane, M., Nandintsetseg, D., DeNicola, V., DePerno, C., Dunlop, J., Gould, N., Hollins, J., Ishii, H., Kaneko, Y., Kays, R., Killen, S., Koeck, B., Lambertucci, S., LaPoint, S., & Calabrese, J. (2020). A comprehensive framework for handling location error in animal tracking data. bioRxiv. https://doi.org/10.1101/2020.06.12.130195
Fleming, C. H., Fagan, W. F., Mueller, T., Olson, K. A., Leimgruber, P., & Calabrese, J. M. (2015a). Estimating where and how animals travel: An optimal framework for path reconstruction from autocorrelated tracking data. Ecology, 15–1607, 1. https://doi.org/10.1890/15-1607.1
Fleming, C. H., Fagan, W. F., Mueller, T., Olson, K. A., Leimgruber, P., & Calabrese, J. M. (2015b). Rigorous home range estimation with movement data: A new autocorrelated kernel density estimator. Ecology, 96(5), 1182–1188. https://doi.org/10.1890/14-2010.1
Fleming, C. H., Noonan, M. J., Medici, E. P., & Calabrese, J. M. (2019). Overcoming the challenge of small effective sample sizes in home-range estimation. Methods in Ecology and Evolution, 10(10), 1679–1689. https://doi.org/10.1111/2041-210X.13270
Fleming, C. H., Sheldon, D., Fagan, W. F., Leimgruber, P., Mueller, T., Nandintsetseg, D., Noonan, M. J., Olson, K. A., Setyawan, E., Sianipar, A., & Calabrese, J. M. (2018). Correcting for missing and irregular data in home-range estimation. Ecological Applications, 28(4), 1003–1010. https://doi.org/10.1002/eap.1704
Frankie, G. W., Baker, H. G., & Opler, P. A. (1974). Tropical plant phenology: Applications for studies in community ecology. In H. Lieth (Ed.), Phenology and seasonality modeling (pp. 287–296). Springer. https://doi.org/10.1007/978-3-642-51863-8_24
Frankie, G. W., Vinson, S. B., Newstrom, L. E., & Barthell, J. F. (1988). Nest site and habitat preferences of Centris Bees in the Costa Rican dry forest. Biotropica, 20(4), 301–310. https://doi.org/10.2307/2388320
Frid, A., & Dill, L. (2002). Human-caused disturbance stimuli as a form of predation risk. Conservation Ecology, 6(1). https://doi.org/10.5751/ES-00404-060111
Gabry, J., Mahr, T., Bürkner, P.-C., Modrák, M., Barrett, M., Weber, F., Sroka, E. C., Sailynoja, T., & Vehtari, A. (2022). bayesplot: Plotting for Bayesian Models (1.10.0) [Computer software]. https://cran.r-project.org/web/packages/bayesplot/index.html
Garmin Customer Support. (n.d.). Improving GPS, distance, and speed accuracy of an outdoor handheld or GLO 2. Retrieved June 22, 2023, from https://support.garmin.com/en-US/?faq=ZYN0dmiaBM3acpi5JceDA9
Gaston, K. J., Jackson, S. F., Cantú-Salazar, L., & Cruz-Piñón, G. (2008). The ecological performance of protected areas. Annual Review of Ecology, Evolution, and Systematics, 39, 93–113.
Gautestad, A., & Mysterud, I. (2005). Intrinsic scaling complexity in animal dispersion and abundance. The American Naturalist, 165, 44–55. https://doi.org/10.1086/426673
Gelmi-Candusso, T. A., Bialozyt, R., Slana, D., Zárate Gómez, R., Heymann, E. W., & Heer, K. (2019). Estimating seed dispersal distance: A comparison of methods using animal movement and plant genetic data on two primate-dispersed Neotropical plant species. Ecology and Evolution, 9(16), 8965–8977. https://doi.org/10.1002/ece3.5422
Gibson, L., & Koenig, A. (2012). Neighboring groups and habitat edges modulate range use in Phayre’s leaf monkeys (Trachypithecus phayrei crepusculus). Behavioral Ecology and Sociobiology, 66, 633–643. https://doi.org/10.1007/s00265-011-1311-2
Giroux, A., Ortega, Z., Oliveira-Santos, L. G. R., Attias, N., Bertassoni, A., & Desbiez, A. L. J. (2021). Sexual, allometric and forest cover effects on giant anteaters’ movement ecology. PLOS ONE, 16(8), e0253345. https://doi.org/10.1371/journal.pone.0253345
Gros-Louis, J., Perry, S., & Manson, J. H. (2003). Violent coalitionary attacks and intraspecific killing in wild white-faced capuchin monkeys ( Cebus capucinus ). Primates, 44(4), 341–346. https://doi.org/10.1007/s10329-003-0050-z
Harvey, P. H., & Clutton-Brock, T. H. (1981). Primate home-range size and metabolic needs. Behavioral Ecology and Sociobiology, 8(2), 151–155. https://doi.org/10.1007/BF00300828
Hemson, G., Johnson, P., South, A., Kenward, R., Ripley, R., & Macdonald, D. (2005). Are kernels the mustard? Data from global positioning system (GPS) collars suggests problems for kernel home-range analyses with least-squares cross-validation. Journal of Animal Ecology, 74(3), 455–463. https://doi.org/10.1111/j.1365-2656.2005.00944.x
Hirsch, B. T., Tujague, M. P., Di Blanco, Y. E., Di Bitetti, M. S., & Janson, C. H. (2013). Comparing capuchins and coatis: Causes and consequences of differing movement ecology in two sympatric mammals. Animal Behaviour, 86(2), 331–338. https://doi.org/10.1016/j.anbehav.2013.05.023
Horne, J. S., Garton, E. O., Krone, S. M., & Lewis, J. S. (2007). Analyzing Animal Movements Using Brownian Bridges. Ecology, 88(9), 2354–2363. https://doi.org/10.1890/06-0957.1
Huang, Z., Yuan, P., Huang, H., Tang, X., Xu, W., Huang, C., & Zhou, Q. (2017). Effect of habitat fragmentation on ranging behavior of white-headed langurs in limestone forests in Southwest China. Primates, 58(3), 423–434. https://doi.org/10.1007/s10329-017-0600-4
Irwin, M., & Raharison, J.-L. (2021). Interpreting Small-Scale Patterns of Ranging by Primates. Spatial Analysis in Field Primatology: Applying GIS at Varying Scales, (pp. 180–203). https://doi.org/10.1017/9781107449824.011
Isbell, L. A., Cheney, D. L., & Seyfarth, R. M. (1990). Costs and benefits of home range shifts among vervet monkeys (Cercopithecus aethiops) in Amboseli National Park, Kenya. Behavioral Ecology and Sociobiology, 27(5), 351–358. https://doi.org/10.1007/BF00164006
Jacobson, O., Crofoot, M., Perry, S., Hench, K., Barrett, B., Finerty, G. E. (2023). Data and code repository for Jacobson et al., 2023: The Importance of Representative Sampling for Home Range Estimation in Field Primatology. https://doi.org/10.17617/3.IFOIIN
Janmaat, K. R. L., Ban, S. D., & Mundry, R. (2021). Estimating travel distance and linearity of primate routes: Ideas on How to clean and smooth track data collected with a handheld GPS. In C. A. Shaffer, F. L. Dolins, J. R. Hickey, L. M. Porter, & N. P. Nibbelink (Eds.), Spatial Analysis in Field Primatology: Applying GIS at Varying Scales (pp. 106–120). Cambridge University Press. https://doi.org/10.1017/9781107449824.007
Janmaat, K. R. L., Olupot, W., Chancellor, R. L., Arlet, M. E., & Waser, P. M. (2009). Long-term site fidelity and individual home range shifts in lophocebus albigena. International Journal of Primatology, 30(3), 443–466. https://doi.org/10.1007/s10764-009-9352-3
Janson, C. H. (2019). Foraging benefits of ecological cognition in fruit-eating primates: Results from field experiments and computer simulations. Frontiers in Ecology and Evolution, 7. https://doi.org/10.3389/fevo.2019.00125
Jay, P. (1965). The common langur of North India. Primate behavior. In De Vore, I. (Ed), Field studies of monkeys and apes, (pp. 197-249). Holt, Rinehart and Winston, New York, NY.
Jennrich, R. I., & Turner, F. B. (1969). Measurement of non-circular home range. Journal of Theoretical Biology, 22(2), 227–237. https://doi.org/10.1016/0022-5193(69)90002-2
Johansson, Ö., Rauset, G. R., Samelius, G., McCarthy, T., Andrén, H., Tumursukh, L., & Mishra, C. (2016). Land sharing is essential for snow leopard conservation. Biological Conservation, 203, 1–7. https://doi.org/10.1016/j.biocon.2016.08.034
Johnson, D. S., London, J. M., Lea, M.-A., & Durban, J. W. (2008). Continuous-time correlated random walk model for animal ℡emetry Data. Ecology, 89(5), 1208–1215. https://doi.org/10.1890/07-1032.1
Jolly, A., & Pride, E. (1998). Troop histories and range inertia of lemur catta at Berenty, Madagascar: A 33-year Perspective 15.
Karelus, D. L., Geary, B. W., Harveson, L. A., & Harveson, P. M. (2021). Movement ecology and space-use by mountain lions in West Texas. Global Ecology and Conservation, 31, e01859. https://doi.org/10.1016/j.gecco.2021.e01859
Kernohan, B., Gitzen, R., & Millspaugh, J. (2001). Chapter 5. Analysis of Animal Space Use and Movements. In: Radio tracking and animal populations (p. 467). Academic Press. https://doi.org/10.1016/B978-012497781-5/50006-2
Laver, P., & Kelly, M. (2010). A critical review of home range studies. The Journal of Wildlife Management, 72, 290–298. https://doi.org/10.2193/2005-589
Lens, L., & Dhondt, A. A. (1994). Effects of habitat fragmentation on the timing of Crested Tit Parus cristatus natal dispersal. Ibis, 136(2), 147–152. https://doi.org/10.1111/j.1474-919X.1994.tb01078.x
Lenske, A. K., & Nocera, J. J. (2018). Field test of an automated radio-telemetry system: Tracking local space use of aerial insectivores. Journal of Field Ornithology, 89(2), 173–187. https://doi.org/10.1111/jofo.12254
Li, B., Chen, C., Ji, W., & Ren, B. (2001). Seasonal home range changes of the Sichuan Snub-Nosed Monkey (Rhinopithecus roxellana) in the Qinling Mountains of China. Folia Primatologica, 71(6), 375–386. https://doi.org/10.1159/000052734
Lyons, A. J., Turner, W. C., & Getz, W. M. (2013). Home range plus: A space-time characterization of movement over real landscapes. Movement Ecology, 1(1), 2. https://doi.org/10.1186/2051-3933-1-2
Mason, W. A. (1968). Use of space by Callicebus groups. In JAY, P. C. (ed.), Primates : Studies in adaptation and variability (pp. 200–216). New York: Holt, Rinehart, & Winston.
McCabe, G. M., & Fedigan, L. M. (2007). Effects of reproductive status on energy intake, ingestion rates, and dietary composition of female Cebus capucinus at Santa Rosa, Costa Rica. International Journal of Primatology, 28(4), 837–851. https://doi.org/10.1007/s10764-007-9159-z
McCann, R., Bracken, A. M., Christensen, C., Fürtbauer, I., & King, A. J. (2021). The relationship between GPS sampling interval and estimated daily travel distances in Chacma Baboons (Papio ursinus). International Journal of Primatology, 42(4), 589–599. https://doi.org/10.1007/s10764-021-00220-8
McEvoy, J. F., Hall, G. P., & McDonald, P. G. (2019). Movements of Australian Wood Ducks (Chenonetta jubata) in an agricultural landscape. Emu - Austral Ornithology, 119(2), 147–156. https://doi.org/10.1080/01584197.2018.1562306
McLester, E., & Fruth, B. (2023). Golden-bellied mangabeys (Cercocebus chrysogaster) exhibit a larger home range and longer travel distances than those of bonobos (Pan paniscus) at LuiKotale, Democratic Republic of the Congo. American Journal of Primatology, 85(6), e23486. https://doi.org/10.1002/ajp.23486
Milton, K., & May, M. L. (1976). Body weight, diet and home range area in primates. Nature, 259(5543), Article 5543. https://doi.org/10.1038/259459a0
Mitani, J. C., & Rodman, P. S. (1979). Territoriality: The relation of ranging pattern and home range size to defendability, with an analysis of territoriality among primate species. Behavioral Ecology and Sociobiology, 5(3), 241–251. https://doi.org/10.1007/BF00293673
Mohr, C. O. (1947). Table of equivalent populations of North American small mammals. The American Midland Naturalist, 37(1), 223–249. https://doi.org/10.2307/2421652
Montano, Y., Marshall, B. M., Ward, M., Silva, I., Artchawakom, T., Waengsothorn, S., & Strine, C. (2021). A stable home: Autocorrelated kernel density estimated home ranges of the critically endangered elongated tortoise. The Herpetological Journal, 33(4), 120–129.
Morato, R. G., Stabach, J. A., Fleming, C. H., Calabrese, J. M., Paula, R. C. D., Ferraz, K. M. P. M., Kantek, D. L. Z., Miyazaki, S. S., Pereira, T. D. C., Araujo, G. R., Paviolo, A., Angelo, C. D., Bitetti, M. S. D., Cruz, P., Lima, F., Cullen, L., Sana, D. A., Ramalho, E. E., Carvalho, M. M., … Leimgruber, P. (2016). Space use and movement of a neotropical top predator: The endangered jaguar. PLOS ONE, 11(12), e0168176. https://doi.org/10.1371/journal.pone.0168176
Naveda-Rodríguez, A., Campbell-Thompson, E., Watson, R. T., McCabe, J., & Vargas, F. H. (2022). Dispersal and space use of captive-reared and wild-rehabilitated harpy eagles released in Central American landscapes: Implications for reintroduction and reinforcement management. Diversity, 14(10), Article 10. https://doi.org/10.3390/d14100886
Nishida, T. (1968). The social group of wild chimpanzees in the Mahali Mountains. Primates, 9(3), 167–224. https://doi.org/10.1007/BF01730971
Noonan, M. J., Fleming, C. H., Tucker, M. A., Kays, R., Harrison, A., Crofoot, M. C., Abrahms, B., Alberts, S. C., Ali, A. H., Altmann, J., Antunes, P. C., Attias, N., Belant, J. L., Beyer, D. E., Bidner, L. R., Blaum, N., Boone, R. B., Caillaud, D., de Paula, R. C., … Calabrese, J. M. (2020). Effects of body size on estimation of mammalian area requirements. Conservation Biology, 34(4), 1017–1028. https://doi.org/10.1111/cobi.13495
Noonan, M. J., Tucker, M. A., Fleming, C. H., Akre, T. S., Alberts, S. C., Ali, A. H., Altmann, J., Antunes, P. C., Belant, J. L., Beyer, D., Blaum, N., Böhning‐Gaese, K., Cullen, L., Paula, R. C., Dekker, J., Drescher‐Lehman, J., Farwig, N., Fichtel, C., Fischer, C., … Calabrese, J. M. (2019). A comprehensive analysis of autocorrelation and bias in home range estimation. Ecological Monographs, 89(2). https://doi.org/10.1002/ecm.1344
Odum, E. P., & Kuenzler, E. J. (1955). Measurement of territory and home range size in birds. The Auk, 72(2), 128–137. https://doi.org/10.2307/4081419
Olson, K. A., Larsen, E. A., Mueller, T., Leimgruber, P., Fuller, T. K., Schaller, G. B., & Fagan, W. F. (2014). Survival probabilities of adult Mongolian gazelles. The Journal of Wildlife Management, 78(1), 35–41. https://doi.org/10.1002/jwmg.640
Oppenheimer, J. (1968). Behavior and ecology of the white-faced monkey, Cebus capucinus, on Barro Colorado Island, Canal Zone, University of Illinois at Urbana-Champaign. Urbana, IL, United States.
Panzacchi, M., Moorter, B. V., & Strand, O. (2013). A road in the middle of one of the last wild reindeer migration routes in Norway: Crossing behaviour and threats to conservation. Rangifer, 15–26. https://doi.org/10.7557/2.33.2.2521
Pe’er, G., Tsianou, M. A., Franz, K. W., Matsinos, Y. G., Mazaris, A. D., Storch, D., Kopsova, L., Verboom, J., Baguette, M., Stevens, V. M., & Henle, K. (2014). Toward better application of minimum area requirements in conservation planning. Biological Conservation, 170, 92–102.https://doi.org/10.1016/j.biocon.2013.12.011
Pereira, L. A., Campos, V. E. W., Gestich, C. C., Ribeiro, M. C., & Culot, L. (2022). Erosion of primate functional diversity in small and isolated forest patches within movement-resistant landscapes. Animal Conservation, 25(6), 782–795. https://doi.org/10.1111/acv.12784
Perry, S. (1996). Intergroup encounters in wild white-faced capuchins (Cebus capucinus). International Journal of Primatology, 17(3), 309–330. https://doi.org/10.1007/BF02736624
Perry, S. (2012). Chapter 4 - The behavior of wild white-faced capuchins: Demography, life history, social relationships, and communication. In H. J. Brockmann, T. J. Roper, M. Naguib, J. C. Mitani, & L. W. Simmons (Eds.), Advances in the study of behavior (Vol. 44, pp. 135–181). Academic Press. https://doi.org/10.1016/B978-0-12-394288-3.00004-6
Perry, S., Godoy, I., & Lammers, W. (2012). The Lomas Barbudal Monkey Project: two decades of research on Cebus capucinus. Long-term field studies of primates, 141–163.
Perry, S., & Jimenez, J. O. (2006). The effects of food size, rarity, and processing complexity on white-faced capuchins’ visual attention to foraging conspecifics. Feeding ecology in apes and other primates, 48, 203.
Phillips, K. A., Elvey, C. R., & Abercrombie, C. L. (1998). Applying GPS to the study of primate ecology: A useful tool? American Journal of Primatology, 46(2), 167–172. https://doi.org/10.1002/(SICI)1098-2345(1998)46:2%3c167::AID-AJP6%3e3.0.CO;2-U
Poessel, S. A., Leitner, P., Inman, R. D., Esque, T. C., & Katzner, T. E. (2022). Demographic and environmental correlates of home ranges and long-distance movements of Mohave ground squirrels. Journal of Mammalogy, gyac082. https://doi.org/10.1093/jmammal/gyac082
Poirier, F. E. (1968). Analysis of a Nilgiri langur (Presbytis johnii) home range change. Primates, 9(1), 29–43. https://doi.org/10.1007/BF01795884
Potts, K. B., Watts, D. P., & Wrangham, R. W. (2011). Comparative Feeding Ecology of Two Communities of Chimpanzees (Pan troglodytes) in Kibale National Park, Uganda. International Journal of Primatology, 32(3), 669–690. https://doi.org/10.1007/s10764-011-9494-y
Powell, R. A. (2000). Animal home ranges and territories and home range estimators. Research Techniques in Animal Ecology: Controversies and Consequences, 442, 65–110.
Quesada, M., & Stoner, K. (2004). Threats to the conservation of tropical dry forest in Costa Rica. Biodiversity Conservation in Costa Rica: Learning the Lessons in a Seasonal Dry Forest, 266–280. https://doi.org/10.1525/california/9780520223097.003.0021
R Core Team. (2022). R: A language and environment for statistical computing [Computer software]. ,Vienna, Austria: R Foundation for Statistical Computing.
Reyna-Hurtado, R., Teichroeb, J. A., Bonnell, T. R., Hernández-Sarabia, R. U., Vickers, S. M., Serio-Silva, J. C., Sicotte, P., & Chapman, C. A. (2018). Primates adjust movement strategies due to changing food availability. Behavioral Ecology, 29(2), 368–376. https://doi.org/10.1093/beheco/arx176
Roberts, S.-J., & Cords, M. (2015). Life as a bachelor: Quantifying the success of an alternative reproductive tactic in male blue monkeys. PeerJ, 3, e1043. https://doi.org/10.7717/peerj.1043
Rubin, D. B. (1984). Bayesianly justifiable and relevant frequency calculations for the applied statistician. The Annals of Statistics, 12(4), 1151–1172. https://doi.org/10.1214/aos/1176346785
Schtickzelle, N., Mennechez, G., & Baguette, M. (2006). Dispersal depression with habitat fragmentation in the bog fritillary butterfly. Ecology, 87(4), 1057–1065. https://doi.org/10.1890/0012-9658(2006)87[1057:ddwhfi]2.0.co;2
Seiler, N., & Robbins, M. M. (2020). Using long-term ranging patterns to assess within-group and between-group competition in wild mountain gorillas. BMC Ecology, 20(1), 40. https://doi.org/10.1186/s12898-020-00306-6
Sennhenn-Reulen, H., Diedhiou, L., Klapproth, M., & Zinner, D. (2017). Estimation of baboon daily travel distances by means of point sampling – the magnitude of underestimation. Primate Biology, 4(2), 143–151. https://doi.org/10.5194/pb-4-143-2017
Silva, I., Fleming, C. H., Noonan, M. J., Alston, J., Folta, C., Fagan, W., & Calabrese, J. M. (2021). Autocorrelation-informed home range estimation: A review and practical guide [Preprint]. EcoEvoRxiv. https://doi.org/10.32942/osf.io/23wq7
Silva, I., Fleming, C. H., Noonan, M. J., Fagan, W. F., & Calabrese, J. M. (2023). movedesign: Shiny R app to evaluate sampling design for animal tracking movement studies (p. 2023.01.27.525894). bioRxiv. https://doi.org/10.1101/2023.01.27.525894
Singleton, I., & van Schaik, C. P. (2001). Orangutan Home Range Size and Its Determinants in a Sumatran Swamp Forest. International Journal of Primatology, 22(6), 877–911. https://doi.org/10.1023/A:1012033919441
Snaith, T. V., & Chapman, C. A. (2005). Towards an ecological solution to the folivore paradox: Patch depletion as an indicator of within-group scramble competition in red colobus monkeys (Piliocolobus tephrosceles). Behavioral Ecology and Sociobiology, 59(2), 185–190. https://doi.org/10.1007/s00265-005-0023-x
Spencer, W. D. (2012). Home ranges and the value of spatial information. Journal of Mammalogy, 93(4), 929–947. https://doi.org/10.1644/12-MAMM-S-061.1
Stoner, K., & Timm, R. (2004). Tropical dry-forest mammals of Palo Verde: Ecology and conservation in a changing landscape. Biodiversity Conservation in Costa Rica: Learning the Lessons in a Seasonal Dry Forest. University of California Press, Berkeley.
Suraci, J. P., Smith, J. A., Chamaillé-Jammes, S., Gaynor, K. M., Jones, M., Luttbeg, B., Ritchie, E. G., Sheriff, M. J., & Sih, A. (2022). Beyond spatial overlap: Harnessing new technologies to resolve the complexities of predator–prey interactions. Oikos, 2022(8), e09004. https://doi.org/10.1111/oik.09004
Switzer, P. (1993). Site fidelity in predictable and unpredictable habitats. Evolutionary Ecology, 7(6), 533–555. https://doi.org/10.1007/BF01237820
Terborgh, J., & Janson, C. H. (1986). The Socioecology of primate groups. Annual Review of Ecology and Systematics, 17(1), 111–136. https://doi.org/10.1146/annurev.es.17.110186.000551
Tucker, M. A., Böhning-Gaese, K., Fagan, W. F., Fryxell, J. M., Van Moorter, B., Alberts, S. C., Ali, A. H., Allen, A. M., Attias, N., Avgar, T., Bartlam-Brooks, H., Bayarbaatar, B., Belant, J. L., Bertassoni, A., Beyer, D., Bidner, L., van Beest, F. M., Blake, S., Blaum, N., … Mueller, T. (2018). Moving in the anthropocene: Global reductions in terrestrial mammalian movements. Science, 359(6374), 466–469. https://doi.org/10.1126/science.aam9712
White, G. C., & Garrott, R. A. (1990). Analysis of Wildlife Radio-Tracking Data. Elsevier.
Worton, B. J. (1989). Kernel methods for estimating the utilization distribution in home-range studies. Ecology, 70(1), 164–168. https://doi.org/10.2307/1938423
Worton, B. J. (1995). A convex hull-based estimator of home-range size. Biometrics, 51(4), 1206–1215. https://doi.org/10.2307/2533254
Acknowledgments
We want to thank the following Lomas Barbudal Monkey Project field assistants who helped collect the movement data, with particular thanks to R. Berl, who was the inspiration for beginning this form of data collection: C. Angyal, R. Berl, M. Corrales, J. Fenton, I. Godoy, I. Gottlieb, L. Guevara, L. Hack, R. Hammond, M. Jackson, W. Lammers, S. Lee, A. Lopez, S. MacCarter, J. Mackenzie, F. McKibben, A. Mensing, Y. Namba, L. Natola, D. Negru, A. Neyer, J.C. Ordoñez J., K. Perry, N. Roberts Buceta, S. Sanford, C.M. Saul, E. Seabright, K. Stewart, W.C. Tucker, M. White, and M. Ziegler.
Also, thanks to Kamran Safi for his advice on this study. We thank the Costa Rican Park Service (SINAC, conservation area Arenal Tempisque) for permission to work in Lomas Barbudal Biological Reserve, and the private landowners who have granted us permission to work on their land (especially Hacienda Pelon, Brin d’Amor and the community of San Ramon de Bagaces).
Finally, we would like to express our appreciation to Joanna Setchell (editor-in-chief) and the reviewers of the International Journal of Primatology for their constructive feedback and valuable suggestions, which significantly enhanced the manuscript's quality.
Funding
Open Access funding enabled and organized by Projekt DEAL. M.C.C. and B.J.B. were supported by the Max Planck Society and the Alexander von Humboldt Foundation in the framework of the Alexander von Humboldt Professorship endowed by the Federal Ministry of Education and Research awarded to Margaret C. Crofoot. The data set was collected primarily via funding to S.E.P. from the National Science Foundation (grants BCS-1919649, BCS-1638428, BCS-0613226, BCS-848360), the National Geographic Society (grants 8671–09, 20113909, 9795–15, 45176R-18), the L.S.B. Leakey Foundation (4 grants), the Templeton World Charity Foundation, Inc. (grant 0208), various UCLA COR grants, and the Wild Capuchin Foundation. Data collection was supplemented by additional personnel hired by graduate students B.J.B. (8 months of data collection funded by the American Society of Primatologists, the ARCS Foundation and an NSF GRF (grant no. 1650042), I. Godoy (13 months of data funded by NSF DDIG to I. Godoy/S. Perry) and C. Gault (18 months funded by a Leakey grant). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Inclusion and Diversity Statement
While citing references scientifically relevant for this work, we actively worked to promote gender balance in our reference list. Additionally, the acknowledgements section includes contributors from the location where the research was conducted, who participated in data collection and field-work management.
Additional information
Handling Editor: Joanna (Jo) M. Setchell


Badges earned for open practices: Open Data and Open Analytical Codes. Experiment materials and data are available in the respository at https://doi.org/10.17617/3.IFOIIN.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jacobson, O.T., Crofoot, M.C., Perry, S. et al. The Importance of Representative Sampling for Home Range Estimation in Field Primatology. Int J Primatol 45, 213–245 (2024). https://doi.org/10.1007/s10764-023-00398-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10764-023-00398-z