
Abstract
The soft robotics field is on the rise. The highly adaptive robots provide the opportunity to bridge the gap between machines and people. However, their elastomeric nature poses significant challenges to the perception, control, and signal processing. Hydrogels and machine learning provide promising solutions to the problems above. This review aims to summarize this recent trend by first assessing the current hydrogel-based sensing and actuation methods applied to soft robots. We outlined the mechanisms of perception in response to various external stimuli. Next, recent achievements of machine learning for soft robots’ sensing data processing and optimization are evaluated. Here we list the strategies for implementing machine learning models from the perspective of applications. Last, we discuss the challenges and future opportunities in perception data processing and soft robots’ high level tasks.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Soft robots usually have compliant bodies, composed of elastomer material to perform tasks in dynamic and unstructured environments [1]. Such compliance also extends the functionality of robots toward human interaction and biomedical applications [2, 3]. Similar to living creatures, soft robots also need sensors to retrieve meaningful information from the environment (exteroception) and monitor the internal states (proprioception) for corresponding actions [4]. The sensing signal from the outside is essential to achieve closed-loop control for higher control accuracy [5]. Unlike the traditional rigid robots, soft robots have an infinite degree of freedom (DoF), plus the system typically showed high nonlinearity and hysteresis [6, 7]. These characteristics pose significant challenges to soft robotic sensing and control [8, 9]. Embedded soft sensors are viable solutions, as they are deformable [1, 10] and show less mechanical mismatch when applied to soft robotics.
Among the common materials for flexible sensors (such as carbon nanotube (CNT), MXene, and reduced graphene oxide (rGO)), hydrogels are especially promising to address the challenges. They are three-dimensional cross-linked hydrophilic polymer networks containing water [11]. Hence, the mechanical properties can be tuned [12] to be highly stretchable, making it especially suitable to apply for soft robot sensing and actuation. Since hydrogels serve as the building block for life [13], they are ideal for making electronic skins by mimicking biological skins. The hydrogel mobile ions serve as the ionic conductors, endowing it with tuned conductivity. They are also transparent for light-based sensing. With the incorporated ionic pendant groups or salt, hydrogels can respond to different stimuli by interacting with polymer networks [14] to serve as multifunctional sensors. They are already applied to detect strain [5], pressure [15], and temperature [16]. Further improvement of the hydrogel sensors may boost the sensing capability to rival biological organisms [17, 18].
After obtaining the sensing signal from the hydrogel, it is hard to form the soft robot’s state representations [19], as the governing equation is almost impractical to represent. Machine learning (ML) is a promising approach to deal with the problem, since it is data-driven and can empirically approximate the unknown model [20, 21]. Therefore, it can estimate the behaviors of the soft systems without explicitly discovering the underlying dynamics. The process of ML decoding the signals helps to reconstruct the original physical phenomenon [22, 23]. In addition, machine learning can help soft robots to perform more advanced tasks, such as manipulation [24], shape detection [23], touch recognition [25, 26], state estimation [6], and multi-modal fusion. These capabilities may improve soft robots’ proprioception, enabling reliably closed-loopcontrol [24] and responses to external stimuli [28] (Fig. 1).

The relationship among soft robot, hydrogel sensors, and machine learning
Another nascent field exerting a significant impact to soft robots is simulation with ML [29]. The point-based methods can be coupled with deep learning to provide solutions for soft robots’ simulation and virtual data processing. It also enabled virtual predictions of the soft robot with optimized designs and controllers [15]. Therefore, the overlap among soft robots, hydrogel sensors, and machine learning is increasing dramatically [30], and it is worthy of more review papers to dive into the interdisciplinary field.
This review is organized by first outlining hydrogel engineering techniques, since they are essential for soft robots applications. Then, we systematically introduce how hydrogel sensors and actuators contribute to the soft robot’s performance. Next, we dive into how machine learning can be leveraged for soft robots’ sensing signal processing and optimized design by simulation. Last, future opportunities and directions are enlightened for upcoming researches.
2 Hydrogels for Soft Robots
2.1 Hydrogel Engineering
Soft robots may be subject to large strains, so the hydrogel-based devices need to be stretchable. To cater for this requirement, chemical crosslinking of hydrogels by covalent bonds or physical entanglement are common synthesizing methods. Yet the material may suffer from slow stimuli response and poor self-healing. To solve the problem, approaches like double network [31, 32], hybrid-crosslinking [33, 34], fiber reinforcement [35], nanoparticle [36,37,38], and slide-ring cross-linker [39] were developed. These methods are closely correlated with the hydrogel’s microstructure. An example of a stretchable hydrogel’s molecular structure is shown in Fig. 2a.

a Schematic illustration of a hydrogel’s molecu-lar structure b Photographs of the stretchable hydrogel during a stretch-release process. c Micrographs of the self-healing process adapted from [40] by Zhouyue Lei & Peiyi Wu, 2019, Nature communication, Creative Commons license
Double network hydrogel’s two networks are cross-linked by covalent bonds. One network has short chains, and the other has long chains. When the ionic gel is stretched, the short-chain network ruptures and dissipates energy to make the gel more stretchable Fig. 2b while tolerating defects and notches. The significant enhancement can be credited to the synergy of two mechanisms: crack bridging by the network of covalent cross-links and hysteresis by unzipping the network of ionic cross-links. Note that the sensing device fabricated with this method might show hysteresis, which needs engineering approaches to tailor it [41, 42].
Another critical requirement is the device’ robustness and reliability, which can be achieved by self-healing Fig. 2c and water retention. The healing mechanisms can be categorized as extrinsic and intrinsic behaviors. Extrinsic healing depends on the small capsules of healing agent [43] or vascular networks [44] to form new polymer chains that connect the fractured parts. Intrinsic mechanisms can heal more times by the reorganization of dynamic covalent bonds or through noncovalent interactions [45], like hydrogen bonding, π−π stacking, metal–ligand interaction, and electrostatic interactions [16, 46, 47]. Water retention can be achieved by combining hydrogel with elastomer [48] or adding gelatin-glycerol. The prior method can use sticking or coating to form, and adding gelatin-glycerol can be achieved by 3D printing [45, 46, 51].
2.2 Hydrogel Sensors
Unlike traditional electronic systems that transmit electricity with electrons, hydrogels use ions [52] to conduct electricity, making them perfect for sensing and signal conduction [53]. The hydrogel sensors can be divided based on the energy conversion approaches as follows.
2.2.1 Mechanical Energy to Electrical/Optical Energy
When the hydrogel sensors are subjected to mechanical deformations or applied forces, they produce a change in the electrical signal. Strain sensors, pressure or tactile sensor [54, 55], acoustic sensors, and touchpad [56] can all be summarized into this category. The electrical-based sensing mechanism can be capacitive, resistive, piezoionic, and triboelectric.
The capacitive sensors’ configuration is generally designed as the dielectric elastomer sandwiched between the hydrogel Fig. 3a. When subjected to pressure or twisted by external torque, the distance between the hydrogel changes, reflecting a capacitance change. They are fast responsive with high linearity [57], yet they are susceptible to environmental contamination and conductive objects [58].

a The schematic illustration and a photograph of a capacitive sensory system using gel and elastomer. b The structure of a typical resistive sensor. c The capacitive and resistive response of the sensory system upon changes of temperature and strain. The figure is adapted from [40] by Z. Lei & P. Wu, 2019, Nature communication, Creative Com-mons license. d The embedded sensors on the top of the soft finger are used to estimate the soft actuator’s twisting [59]
Meanwhile, the resistive type sensor responds to changes in cross-section and length to sense the resistance change Fig. 3b. With strain-sensitive additives, the sensitivity can be even higher. Current issues associated with the resistive type are temperature-related drifting and poor long-term stability. On the other hand, making use of these temperature coupling effects, the strain sensors can be applied for multi-modal sensing Fig. 3c, d.
Here we show an example of hydrogel applied on the soft robot’s sensing using resistance measurement Fig. 4a, b. Highly sensitive strain and pressure sensors are integrated as the artificial electronic skin for soft robots by 3D printing Fig. 4c, providing proprioceptive or haptic feedback. To fully utilize the sensors, researchers integrate redundant resistive strain and pressure sensors at different locations of the soft robot, so that the sensor network can obtain more information and monitor the task manipulation in a time series.

a Images of the interaction sequence between a ball and a soft robotic gripper. b ΔR of each gel sensor as a function of time is plotted during the interaction sequence. c Schematic illustrations of the actuator with somatosensation enabled by ionogel. The figures are adapted from [67], by R. Truby et al. (Reproduced with permission). d Fast bending actuation of the hydraulic hydrogel actuator. The figure is adapted from [80], by H. Yuk et al. 2019, Nature communication, Creative Commons license
Alternatively, utilizing the transparent characteristic of ionic gels, the optic signal can be captured when subjected to mechanical stimuli. Using composite of ZnS–silicone gel–silicone elastomer as the material system [57], ZnS particles impart a soft robot with the ability to vary its color and sense both external touch and shape changes. Alternatively, a tactile sensor can use a camera to track the sensor surface to measure both the magnitude and direction of an applied force. These vision-based tactile sensors can measure the 2D texture and 3D topography of the contact surface, utilizing elastomeric gel as the sensing surface and a camera to capture the contact deformation from changes in light. This type of 2D images are especially suitable for deep learning processing, leading to higher-level tasks.
The latest studies on hydrogel’s piezoionic effect is promising to create ionic skin with sensing ability similar to biological skin. The anions and cations in hydrogels have different mobility. So when the material is pressed, it causes an ionic gradient that generates voltage [60]. The self-powered method can be applied for neuromodulation with living animals and monitoring different motions [61,62,63]. Meanwhile, it can also sense multi-modal signals using the thermoelectric effect [64].
Another recently emerged type of triboelectric nanogenerator is made with hydrogel to perform tactile sensing with high performance [54]. Typically, the hydrogel part needs to be coated with elastomer, and it generates electricity when separated from the dielectric layer. In comparison, the voltage generated by triboelectric effect can be very high, showing high sensitivity to dynamic pressures. It is even possible to detect precontact event by optimizing elastomeric electret, which greatly expand the functionalities of soft robot [55]. Some recent studies of hydrogel sensors applied to soft robots are listed in Table 1.
2.2.2 Thermal Energy to Electrical Energy
Thermal sensing is also essential for soft robots to identify the object and avoid hazardous environments [68]. The hydrogel thermal sensor can convert the temperature stimuli into electrical or optical responses. The electrical-based sensing can be divided into three categories, resistive, capacitive, and thermoelectric type.
The resistive thermal sensor’s mechanism lies in the temperature dependent ions migration rate [40]. Due to the material’s high sensitivity, they were seen applied as the thermal transducer [71]. To characterize the thermal sensitivity of a resistor, the temperature coefficient of resistance (TCR) is often used. It describes the percentage change of resistance per Celsius degree. The double network hydrogel exhibited a TCR of 2.6%/℃ [31], which is already more sensitive than some semiconductor thermistors. By introducing ethylene glycol/glycerol, extremely high TCR values of 19.6%/℃ [73] and 24%/℃ [73] are reached.
The capacitive type utilizes the hydrogel swelling and shrinking property to convert the thermal stimuli into a change of capacitance. When the thermal responsive hydrogel is subjected to temperature changes, it will show a volumetric transition as a result of the interaction between the polymer network and the solvent [74].
Recent emerged hydrogel-based thermoelectric material showed surprisingly high seeback coefficient. The work uses alkali salts and an iron-based redox to generate 17.0 millivolts per degree Kelvin, which is two orders higher than traditional thermoelectric materials [66]. Later, the hydrogel made by synergistic coordination and hydration interactions [77] showed thermal sensitivity of − 37.61 millivolts per kelvin. These encouraging findings indicate hydrogel can play a significant role in soft robots’ self-powered thermal sensing.
2.3 Hydrogel Actuators
Aside from sensing applications in soft robotics, hydrogels can be applied as actuators to swell or shrink [77]. The swelling degree of the hydrogel is determined by the free energy of expansion and the entropy of mixing. They could be affected strongly by electricity, temperature, pH, light. These condition changes could act as the stimuli for actuation [78].
The most frequently seen actuator is the dielectric elastomer actuator (DEA). It comprises a dielectric elastomer layer, sandwiched between two ionically conductive hydrogel layers. When a high voltage is applied between the hydrogels, ions of opposite charges accumulate along the hydrogel/elastomer interface. This induces Maxwell stress between the hydrogels, resulting in thickness contraction and area expansion. The development of hydrogel-based actuator showed promising applications in various complex environments. A pressure-resilient soft robot made of DE and hydrogel swimming at extreme ocean depths has been studied recently [79]. To make soft actuators with high-speed and high-force, hydraulic actuation of hydrogels has been explored Fig. 4d. This soft robot can be sonically camouflaged in water [80], making it very promising for future underwater exploration.
3 Machine Learning for Soft Robot
Some recent research on machine learning techniques applied to soft robots are listed in Table 2. To better illustrate how the field is progressing, we use several key features, such as sensor used, data type, multi-modal or not, ML technique, and its applications, to categorize these works.
3.1 Machine Learning for Sensing
Machine learning-based method is promising for both soft robot proprioception and objects recognition when resistive or capacitive readings are available [92, 93]. The object identification was seen frequently based on the finger curvature data using machine learning algorithms [81]. The techniques can be convolutional neural networks (CNN) and recurrent neural networks (RNN). RNN deals time series data more. It can be used for inverse mapping problems and flexible strain sensors modeling. Researchers used LSTM (Long short term memory) to estimate the contact force in the soft robots [6], and the approach can model the kinematics of a soft actuator in real-time while being robust to sensors’ nonlinearity and drift. Further optimization was seen using transfer learning to improve the performance [83]. Some studies also utilize CNNs for time series feature extraction, yet CNNs appeared more in problems requiring two or three dimensions data [94]. Capacitive arrays can provide sensing data in two dimensions. By feeding the data into CNN or feed-forward neural networks (NN), they can classify and localize touch events on the interface or capture surface deformations in real-time [26, 95].
Other types of sensing modality can be combined using ML techniques to boost the sensing capability [29]. When thermal conductivity, contact pressure, object temperature and environment temperature are fed to the multiple layer perceptrons (MLPs) simultaneously, machine learning can improve the object recognition. It discerns shapes, sizes, and materials in a diverse set of objects with improved accuracy, comparing to single modal inputs [96]. Pressure sensing has been combined with other modality using machine learning to expand the sensing capability. Using machine learning techniques, such as support vector machine (SVM), the soft robot can detect obstacles and recognize the gestures [25].
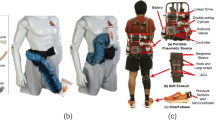
Vision-based proprioception and tactile sensing can be obtained simultaneously using embedded cameras or depth sensors by extracting high-resolution information from the deformation of the soft robots Fig. 5a, b. Training the data with CNN can lead to object detection, slip detection [87, 97], robot’s shape or angle proprioception [28, 86, 98], and interaction prediction [90]. For example, in research for soft robot 3D shape proprioception, the system uses a CNN to encode the input images from the internal cameras into latent representations, and then train a decoder neural network to reconstruct the 3D shapes of the robot [85].

Combining multisensory information and transferring multi-modal [22] representations across tasks was also explored in recent studies. To fuse the sensor data and perform prediction, a feature representation of the visual and haptic data can form compact feature vectors. Then, decoders are used to predict self-supervised objectives [99]. In addition, deep models can incorporate raw inputs from both vision and touch, by concatenating the outputs of the camera images, GelSight images, and the action network. The output was applied to predict the grasp success probability. In this way, the soft gripper can grasp a wide range of unseen objects with a higher success rate and lower force [100]. Cross-modal prediction can also be made possible with deep learning. With visual and tactile sensors, researchers can collect a dataset of vision and tactile image sequences. Then, a conditional model that incorporates the scale and location information of the touch can be transformed to vision. The deep learning model requires a generator, with two CNN-based encoders and one decoder. In this way, it uses vision sequence and touch reference to predict the touch results [88] Fig. 5c.
3.2 Machine Learning for Simulation and Control
Simulation can aid robot characteristics prediction and optimal design. Prior attempts using finite element analysis (FEA) were computationally expensive [102]. Recently developed physics engines are combined with deep learning to optimize soft robots Fig. 6a. Such gradient-based optimization methods can be more computationally efficient [103]. Besides, by simulating virtual robots using data-driven models, we can simultaneously optimize multiple objectives, such as geometry Fig. 6b, controller models, [104] and physical system properties for system identification.

When using deep learning for soft robot control, the regression-based controller can be designed in this way. It takes the input state vector z, which includes the target position, the center of mass position, and the velocity of the soft component. During optimization, the algorithm performs gradient descent on variables W and b, and a = tanh (Wz + b) is the actuation-generated from the controller. Using the deep learning-based controller, a soft 2D walker optimized using gradient descent can find the gaits to achieve maximum distance [95].
Since the soft robot has infinite numbers of DoF, modeling the compliant robot is complex, and reinforcement learning can be applied to address the complexity [105, 106]. The closed-loop control can also be achieved in a simulation environment with reinforcement learning. In this way, the model-free method can deal with the soft robot’s challenging deformation scenarios [107].
When the hybrid particle-grid-based simulation is combined with deep variational convolutional autoencoder architectures, it can capture salient features of robot dynamics for improved state estimation, control, and design [108]. Meanwhile, with the differentiable physical engine that simulates elastic deformation, it is possible to conduct supervised learning on multiple soft-body manipulation tasks with different configurations [109]. Moreover, based on simulation data, the feature extraction network can learn the representation of sparsely located sensors for optimized object grasping and proprioception [84, 110].
4 Future Challenges and Opportunities
In summary, there has been tremendous progress in the performance and versatility of soft robots in recent years, leveraging advanced machine learning techniques and gel type materials. To realize the full potential, fundamental developments in materials engineering, smart structures, sensing mechanisms, and data processing algorithms are required to boost the progress of soft robotics [4, 111].
We believe that ionic gel-based sensing, especially multi-modal stimuli sensing, will play a critical role in the sophistication of soft robotics. However, several things need to consider. First, how to optimize the wiring for large area haptic sensor arrays? This question hampers soft robots’ real-world applications. Also, resistive tactile sensing using hydrogel can lead to unwanted drift, as the hydrogel is sensitive to temperature changes, which is hard to find real-time solutions to avoid it.
Using machine learning to aid in sensing and control is a promising way, as it could impact the space of what is possible with intelligent robotics systems. Yet, there remained challenging tasks to solve. For instance, current 3D shape proception is still not integrated with feedback control to enable controlled shape change. Also, humans fuse different sensing modalities using maximum likelihood estimation and the Bayesian method, yet we rarely witness studies applying these principles on soft robots for multi-modal fusion due to engineering difficulties. Moreover, deep learning coupled with the physics engine will play a more significant role in the future to optimize the soft robots in multiple ways simultaneously. However, this field is still in its infancy. Future development is expected when more interdisicplinary collaborations are available.
In the short term, the field is focusing on soft robots’ sensory actuation, techniques for processing the sensor information, and feedback control. The longer-term goal lies in future exploratory robots that can navigate the unpredictable natural world. We expect to see a trend toward more complex hybrid systems dealing with various robotic tasks. In a more realistic environment, the sources of information are more diverse, so it requires more sophisticated deep learning models to fuse the multi-modal signals and perform high-level tasks. This demands the algorithms to derive efficient representations of the environment from the high-dimensional sensor inputs and use them to generalize the past experience to new situations. Humans and other animals seem to solve problems through a harmonious combination of reinforcement learning and hierarchical sensory processing systems [112]. Therefore, deep reinforcement learning is also a promising pathway for the soft robot to deal with advanced tasks [113, 114], such as decision-making and policy learning. In that way, the soft robot can perform multiple steps of action, solving more complicated tasks.
Data Availability
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Byun, J., Lee, Y., Yoon, J., Lee, B., Oh, E., Chung, S., Lee, T., Cho, K.-J., Kim, J., & Hong, Y. (2018). Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots. Science Robotics. https://doi.org/10.1126/scirobotics.aas9020
Rus, D., & Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature, 521(7553), 467–475. https://doi.org/10.1038/nature14543
Trivedi, D., Rahn, C. D., Kier, W. M., & Walker, I. D. (2008). Soft robotics: Biological inspiration, state of the art, and future research. Applied Bionics and Biomechanics, 5(3), 99–117. https://doi.org/10.1080/11762320802557865
Li, S., Zhao, H., & Shepherd, R. F. (2017). Flexible and stretchable sensors for fluidic elastomer actuated soft robots. MRS Bulletin, 42(02), 138–142. https://doi.org/10.1557/mrs.2017.4
Ng, C. S. X., & Lum, G. Z. (2021). Untethered soft robots for future planetary explorations? Advanced Intelligent Systems. https://doi.org/10.1002/aisy.202100106
Thuruthel, T. G., Shih, B., Laschi, C., & Tolley, M. T. (2019). Soft robot perception using embedded soft sensors and recurrent neural networks. Science Robotics. https://doi.org/10.1126/scirobotics.aav1488
Su, M., Xie, R., Qiu, Y., & Guan, Y. (2022). Design, mobility analysis and gait planning of a leech-like soft crawling robot with stretching and bending deformation. Journal of Bionic Engineering. https://doi.org/10.1007/s42235-022-00256-3
Polygerinos, P., Correll, N., Morin, S. A., Mosadegh, B., Onal, C. D., Petersen, K., Cianchetti, M., Tolley, M. T., & Shepherd, R. F. (2017). Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Advanced Engineering Materials, 19(12), 1700016. https://doi.org/10.1002/adem.201700016
George Thuruthel, T., Ansari, Y., Falotico, E., & Laschi, C. (2018). Control strategies for soft robotic manipulators: A survey. Soft Robotics, 5(2), 149–163. https://doi.org/10.1089/soro.2017.0007
Park, M., Jeong, B., & Park, Y.-L. (2021). Hybrid system analysis and control of a soft robotic gripper with embedded proprioceptive sensing for enhanced gripping performance. Advanced Intelligent Systems, 3(3), 2000061. https://doi.org/10.1002/aisy.202000061
Pan, L., Yu, G., Zhai, D., Lee, H. R., Zhao, W., Liu, N., Wang, H., Tee, B.C.-K., Shi, Y., Cui, Y., & Bao, Z. (2012). Hierarchical nanostructured conducting polymer hydrogel with high electrochemical activity. Proceedings of the National Academy of Sciences, 109(24), 9287–9292. https://doi.org/10.1073/pnas.1202636109
Wang, Z., Cong, Y., & Fu, J. (2020). Stretchable and tough conductive hydrogels for flexible pressure and strain sensors. Journal of Materials Chemistry B, 8(16), 3437–3459. https://doi.org/10.1039/C9TB02570G
Wirthl, D., Pichler, R., Drack, M., Kettlguber, G., Moser, R., Gerstmayr, R., Hartmann, F., Bradt, E., Kaltseis, R., Siket, C. M., Schausberger, S. E., Hild, S., Bauer, S., & Kaltenbrunner, M. (2017). Instant tough bonding of hydrogels for soft machines and electronics. Science Advances. https://doi.org/10.1126/sciadv.1700053
Lee, Y., Song, W. J., & Sun, J.-Y. (2020). Hydrogel soft robotics. Materials Today Physics, 15, 100258. https://doi.org/10.1016/j.mtphys.2020.100258
Howison, T., Hauser, S., Hughes, J., & Iida, F. (2021). Reality-assisted evolution of soft robots through large-scale physical experimentation: A review. Artificial Life, 26(4), 484–506. https://doi.org/10.1162/artl_a_00330
Phadke, A., Zhang, C., Arman, B., Hsu, C.-C., Mashelkar, R. A., Lele, A. K., Tauber, M. J., Arya, G., & Varghese, S. (2012). Rapid self-healing hydrogels. Proceedings of the National Academy of Sciences, 109(12), 4383–4388. https://doi.org/10.1073/pnas.1201122109
Shih, B., Shah, D., Li, J., Thuruthel, T. G., Park, Y.-L., Iida, F., Bao, Z., Kramer-Bottiglio, R., & Tolley, M. T. (2020). Electronic skins and machine learning for intelligent soft robots. Science Robotics. https://doi.org/10.1126/scirobotics.aaz9239
Li, G., Wang, S., Li, M., & Duan, Y. Y. (2021). Towards real-life EEG applications: Novel superporous hydrogel-based semi-dry EEG electrodes enabling automatically ‘charge–discharge’ electrolyte. Journal of Neural Engineering, 18(4), 046016. https://doi.org/10.1088/1741-2552/abeeab
Calisti, M., Giorelli, M., Levy, G., Mazzolai, B., Hochner, B., Laschi, C., & Dario, P. (2011). An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspiration & Biomimetics, 6(3), 036002. https://doi.org/10.1088/1748-3182/6/3/036002
Chin, K., Hellebrekers, T., & Majidi, C. (2020). Machine learning for soft robotic sensing and control. Advanced Intelligent Systems, 2(6), 1900171. https://doi.org/10.1002/aisy.201900171
Shi, Q., Zhang, Z., He, T., Sun, Z., Wang, B., Feng, Y., Shan, X., Salam, B., & Lee, C. (2020). Deep learning enabled smart mats as a scalable floor monitoring system. Nature Communications, 11(1), 4609. https://doi.org/10.1038/s41467-020-18471-z
Huang, H., Lin, J., Wu, L., Fang, B., Wen, Z., & Sun, F. (2020). Machine learning-based multi-modal information perception for soft robotic hands. Tsinghua Science and Technology, 25(2), 255–269. https://doi.org/10.26599/TST.2019.9010009
van Meerbeek, I. M., de Sa, C. M., & Shepherd, R. F. (2018). Soft optoelectronic sensory foams with proprioception. Science Robotics. https://doi.org/10.1126/scirobotics.aau2489
Kroemer, O., Niekum, S., & Konidaris, G. (2021). A Review of Robot Learning for Manipulation: Challenges, Representations, and Algorithms. Journal of Machine Learning Research 22. Retrieved from http://jmlr.org/papers/v22/19-804.html.
Hughes, D., Lammie, J., & Correll, N. (2018). A robotic skin for collision avoidance and affective touch recognition. IEEE Robotics and Automation Letters, 3(3), 1386–1393. https://doi.org/10.1109/LRA.2018.2799743
Larson, C., Spjut, J., Knepper, R., & Shepherd, R. (2019). A deformable interface for human touch recognition using stretchable carbon nanotube dielectric elastomer sensors and deep neural networks. Soft Robotics, 6(5), 611–620. https://doi.org/10.1089/soro.2018.0086
Thuruthel, T. G., Falotico, E., Renda, F., & Laschi, C. (2019). Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Transactions on Robotics, 35(1), 124–134. https://doi.org/10.1109/TRO.2018.2878318
Hofer, M., Sferrazza, C., & D’Andrea, R. (2021). A vision-based sensing approach for a spherical soft robotic arm. Frontiers in Robotics and A, I, 8. https://doi.org/10.3389/frobt.2021.630935
Zhu, J., Sun, Z., Xu, J., Walczak, R. D., Dziuban, J. A., & Lee, C. (2021). Volatile organic compounds sensing based on Bennet doubler-inspired triboelectric nanogenerator and machine learning-assisted ion mobility analysis. Science Bulletin, 66(12), 1176–1185. https://doi.org/10.1016/j.scib.2021.03.021
Yin, H., Varava, A., & Kragic, D. (2021). Modeling, learning, perception, and control methods for deformable object manipulation. Science Robotics. https://doi.org/10.1126/scirobotics.abd8803
Wu, J., Han, S., Yang, T., Li, Z., Wu, Z., Gui, X., Tao, K., Miao, J., Norford, L. K., Liu, C., & Huo, F. (2018). Highly stretchable and transparent thermistor based on self-healing double network hydrogel. ACS Applied Materials and Interfaces, 10(22), 19097–19105. https://doi.org/10.1021/acsami.8b03524
Gong, J. P., Katsuyama, Y., Kurokawa, T., & Osada, Y. (2003). Double-network hydrogels with extremely high mechanical strength. Advanced Materials, 15(14), 1155–1158. https://doi.org/10.1002/adma.200304907
Henderson, K. J., Zhou, T. C., Otim, K. J., & Shull, K. R. (2010). Ionically cross-linked triblock copolymer hydrogels with high strength. Macromolecules, 43(14), 6193–6201. https://doi.org/10.1021/ma100963m
Sun, J.-Y., Zhao, X., Illeperuma, W. R. K., Chaudhuri, O., Oh, K. H., Mooney, D. J., Vlassak, J. J., & Suo, Z. (2012). Highly stretchable and tough hydrogels. Nature, 489(7414), 133–136. https://doi.org/10.1038/nature11409
Moutos, F. T., Freed, L. E., & Guilak, F. (2007). A biomimetic three-dimensional woven composite scaffold for functional tissue engineering of cartilage. Nature Materials, 6(2), 162–167. https://doi.org/10.1038/nmat1822
Chen, S., Tang, F., Tang, L., & Li, L. (2017). Synthesis of Cu-nanoparticle hydrogel with self-healing and photothermal properties. ACS Applied Materials & Interfaces, 9(24), 20895–20903. https://doi.org/10.1021/acsami.7b04956
Diba, M., Wang, H., Kodger, T. E., Parsa, S., & Leeuwenburgh, S. C. G. (2017). Highly elastic and self-healing composite colloidal gels. Advanced Materials, 29(11), 1604672. https://doi.org/10.1002/adma.201604672
Gaharwar, A. K., Rivera, C. P., Wu, C.-J., & Schmidt, G. (2011). Transparent, elastomeric and tough hydrogels from poly(ethylene glycol) and silicate nanoparticles. Acta Biomaterialia, 7(12), 4139–4148. https://doi.org/10.1016/j.actbio.2011.07.023
Bin Imran, A., Esaki, K., Gotoh, H., Seki, T., Ito, K., Sakai, Y., & Takeoka, Y. (2014). Extremely stretchable thermosensitive hydrogels by introducing slide-ring polyrotaxane cross-linkers and ionic groups into the polymer network. Nature Communications, 5(1), 5124. https://doi.org/10.1038/ncomms6124
Lei, Z., & Wu, P. (2019). A highly transparent and ultra-stretchable conductor with stable conductivity during large deformation. Nature Communications, 10(1), 3429. https://doi.org/10.1038/s41467-019-11364-w
Ko, S., Chhetry, A., Kim, D., Yoon, H., & Park, J. Y. (2022). Hysteresis-free double-network hydrogel-based strain sensor for wearable smart bioelectronics. ACS Applied Materials & Interfaces, 14(27), 31363–31372. https://doi.org/10.1021/acsami.2c09895
Meng, X., Qiao, Y., Do, C., Bras, W., He, C., Ke, Y., Russell, T. P., & Qiu, D. (2022). Hysteresis-free nanoparticle-reinforced hydrogels. Advanced Materials, 34(7), 2108243. https://doi.org/10.1002/adma.202108243
White, S. R., Sottos, N. R., Geubelle, P. H., Moore, J. S., Kessler, M. R., Sriram, S. R., Brown, E. N., & Viswanathan, S. (2001). Autonomic healing of polymer composites. Nature, 409(6822), 794–797. https://doi.org/10.1038/35057232
Toohey, K. S., Sottos, N. R., Lewis, J. A., Moore, J. S., & White, S. R. (2007). Self-healing materials with microvascular networks. Nature Materials, 6(8), 581–585. https://doi.org/10.1038/nmat1934
Yanagisawa, Y., Nan, Y., Okuro, K., & Aida, T. (2018). Mechanically robust, readily repairable polymers via tailored noncovalent cross-linking. Science, 359(6371), 72–76. https://doi.org/10.1126/science.aam7588
Darabi, M. A., Khosrozadeh, A., Mbeleck, R., Liu, Y., Chang, Q., Jiang, J., Cai, J., Wang, Q., Luo, G., & Xing, M. (2017). Skin-inspired multifunctional autonomic-intrinsic conductive self-healing hydrogels with pressure sensitivity, stretchability, and 3D printability. Advanced Materials, 29(31), 1–8. https://doi.org/10.1002/adma.201700533
He, X., Zhang, C., Wang, M., Zhang, Y., Liu, L., & Yang, W. (2017). An electrically and mechanically autonomic self-healing hybrid hydrogel with tough and thermoplastic properties. ACS Applied Materials & Interfaces, 9(12), 11134–11143. https://doi.org/10.1021/acsami.7b00358
Yuk, H., Zhang, T., Parada, G. A., Liu, X., & Zhao, X. (2016). Skin-inspired hydrogel–elastomer hybrids with robust interfaces and functional microstructures. Nature Communications, 7(1), 12028. https://doi.org/10.1038/ncomms12028
Yang, H., Li, C., Yang, M., Pan, Y., Yin, Q., Tang, J., Qi, H. J., & Suo, Z. (2019). Printing hydrogels and elastomers in arbitrary sequence with strong adhesion. Advanced Functional Materials. https://doi.org/10.1002/adfm.201901721
Tian, K., Bae, J., Bakarich, S. E., Yang, C., Gately, R. D., Spinks, G. M., Pin her Panhuis, M., Suo, Z., & Vlassak, J. J. (2017). 3D printing of transparent and conductive heterogeneous hydrogel-elastomer systems. Advanced Materials, 29(10), 1604827. https://doi.org/10.1002/adma.201604827
Hardman, D., Hughes, J., Thuruthel, T. G., Gilday, K., & Iida, F. (2021). 3D printable sensorized soft gelatin hydrogel for multi-material soft structures. IEEE Robotics and Automation Letters, 6(3), 5269–5275. https://doi.org/10.1109/LRA.2021.3072600
Liu, Y., Liu, J., Chen, S., Lei, T., Kim, Y., Niu, S., Wang, H., Wang, X., Foudeh, A. M., Tok, J.B.-H., & Bao, Z. (2019). Soft and elastic hydrogel-based microelectronics for localized low-voltage neuromodulation. Nature Biomedical Engineering, 3(1), 58–68. https://doi.org/10.1038/s41551-018-0335-6
Keplinger, C., Sun, J.-Y., Foo, C. C., Rothemund, P., Whitesides, G. M., & Suo, Z. (2013). Stretchable, transparent ionic conductors. Science, 341(6149), 984–987. https://doi.org/10.1126/science.1240228
Someya, T., Sekitani, T., Iba, S., Kato, Y., Kawaguchi, H., & Sakurai, T. (2004). A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proceedings of the National Academy of Sciences, 101(27), 9966–9970. https://doi.org/10.1073/pnas.0401918101
Choi, D., Jang, S., Kim, J. S., Kim, H.-J., Kim, D. H., & Kwon, J.-Y. (2019). A Highly sensitive tactile sensor using a pyramid-plug structure for detecting pressure, shear force, and torsion. Advanced Materials Technologies, 4(3), 1800284. https://doi.org/10.1002/admt.201800284
Gao, G., Yang, F., Zhou, F., He, J., Lu, W., Xiao, P., Yan, H., Pan, C., Chen, T., & Wang, Z. L. (2020). Bioinspired self-healing human-machine interactive touch pad with pressure-sensitive adhesiveness on targeted substrates. Advanced Materials, 32(50), 2004290. https://doi.org/10.1002/adma.202004290
Larson, C., Peele, B., Li, S., Robinson, S., Totaro, M., Beccai, L., Mazzolai, B., & Shepherd, R. (2016). Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science, 351(6277), 1071–1074. https://doi.org/10.1126/science.aac5082
Wang, H., Totaro, M., & Beccai, L. (2018). Toward perceptive soft robots: progress and challenges. Advanced Science, 5(9), 1800541. https://doi.org/10.1002/advs.201800541
Wang, S., Sun, Z., Zhao, Y., & Zuo, L. (2021). A highly stretchable hydrogel sensor for soft robot multi-modal perception. Sensors and Actuators A: Physical, 331, 113006. https://doi.org/10.1016/j.sna.2021.113006
Dobashi, Y., Yao, D., Petel, Y., Nguyen, T. N., Sarwar, M. S., Thabet, Y., Ng, C. L. W., Scabeni Glitz, E., Nguyen, G. T. M., Plesse, C., Vidal, F., Michal, C. A., & Madden, J. D. W. (2022). Piezoionic mechanoreceptors: Force-induced current generation in hydrogels. Science, 376(6592), 502–507. https://doi.org/10.1126/science.aaw1974
Liu, Y., Hu, Y., Zhao, J., Wu, G., Tao, X., & Chen, W. (2016). Self-powered piezoionic strain sensor toward the monitoring of human activities. Small (Weinheim an der Bergstrasse, Germany), 12(36), 5074–5080. https://doi.org/10.1002/smll.201600553
Wen, F., Sun, Z., He, T., Shi, Q., Zhu, M., Zhang, Z., Li, L., Zhang, T., & Lee, C. (2020). Machine learning glove using self-powered conductive superhydrophobic triboelectric textile for gesture recognition in VR/AR applications. Advanced Science, 7(14), 2000261. https://doi.org/10.1002/advs.202000261
Guo, X., He, T., Zhang, Z., Luo, A., Wang, F., Ng, E. J., Zhu, Y., Liu, H., & Lee, C. (2021). Artificial intelligence-enabled caregiving walking stick powered by ultra-low-frequency human motion. ACS Nano, 15(12), 19054–19069. https://doi.org/10.1021/acsnano.1c04464
Xia, M., Pan, N., Zhang, C., Zhang, C., Fan, W., Xia, Y., Wang, Z., & Sui, K. (2022). Self-powered multifunction ionic skins based on gradient polyelectrolyte hydrogels. ACS Nano, 16(3), 4714–4725. https://doi.org/10.1021/acsnano.1c11505
Pu, X., Liu, M., Chen, X., Sun, J., Du, C., Zhang, Y., Zhai, J., Hu, W., & Wang, Z. L. (2017). Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Science Advances. https://doi.org/10.1126/sciadv.1700015
Guo, Z. H., Wang, H. L., Shao, J., Shao, Y., Jia, L., Li, L., Pu, X., & Wang, Z. L. (2022). Bioinspired soft electroreceptors for artificial precontact somatosensation. Science Advances. https://doi.org/10.1126/sciadv.abo5201
Truby, R. L., Wehner, M., Grosskopf, A. K., Vogt, D. M., Uzel, S. G. M., Wood, R. J., & Lewis, J. A. (2018). Soft somatosensitive actuators via embedded 3D printing. Advanced Materials, 30(15), 1706383. https://doi.org/10.1002/adma.201706383
Jing, L., Hsiao, L.-Y., Li, S., Yang, H., Ng, P. L. P., Ding, M., van Truong, T., Gao, S.-P., Li, K., Guo, Y.-X., y Alvarado, P. V., & Chen, P.-Y. (2021). 2D-Material-integrated hydrogels as multifunctional protective skins for soft robots. Materials Horizons, 8(7), 2065–2078. https://doi.org/10.1039/D0MH01594F
Ying, B., Chen, R. Z., Zuo, R., Li, J., & Liu, X. (2021). An anti-freezing, ambient-stable and highly stretchable ionic skin with strong surface adhesion for wearable sensing and soft robotics. Advanced Functional Materials, 31(42), 2104665. https://doi.org/10.1002/adfm.202104665
Hardman, D., George Thuruthel, T., & Iida, F. (2022). Self-healing ionic gelatin/glycerol hydrogels for strain sensing applications. NPG Asia Materials, 14(1), 11. https://doi.org/10.1038/s41427-022-00357-9
Shin, S.-H., Lee, W., Kim, S.-M., Lee, M., Koo, J. M., Hwang, S. Y., Oh, D. X., & Park, J. (2019). Ion-conductive self-healing hydrogels based on an interpenetrating polymer network for a multimodal sensor. Chemical Engineering Journal, 371, 452–460. https://doi.org/10.1016/j.cej.2019.04.077
Wu, J., Wu, Z., Wei, Y., Ding, H., Huang, W., Gui, X., Shi, W., Shen, Y., Tao, K., & Xie, X. (2020). Ultrasensitive and stretchable temperature sensors based on thermally stable and self-healing organohydrogels. ACS Applied Materials and Interfaces, 12(16), 19069–19079. https://doi.org/10.1021/acsami.0c04359
Wu, Z., Ding, H., Tao, K., Wei, Y., Gui, X., Shi, W., Xie, X., & Wu, J. (2021). Ultrasensitive, stretchable, and fast-response temperature sensors based on hydrogel films for wearable applications. ACS Applied Materials & Interfaces, 13(18), 21854–21864. https://doi.org/10.1021/acsami.1c05291
Lei, Z., Wang, Q., & Wu, P. (2017). A multifunctional skin-like sensor based on a 3D printed thermo-responsive hydrogel. Materials Horizons, 4(4), 694–700. https://doi.org/10.1039/C7MH00262A
Han, C.-G., Qian, X., Li, Q., Deng, B., Zhu, Y., Han, Z., Zhang, W., Wang, W., Feng, S.-P., Chen, G., & Liu, W. (2020). Giant thermopower of ionic gelatin near room temperature. Science, 368(6495), 1091–1098. https://doi.org/10.1126/science.aaz5045
Chen, B., Chen, Q., Xiao, S., Feng, J., Zhang, X., & Wang, T. (2021). Giant negative thermopower of ionic hydrogel by synergistic coordination and hydration interactions. Science Advances. https://doi.org/10.1126/sciadv.abi7233
Banerjee, H., Suhail, M., & Ren, H. (2018). Hydrogel actuators and sensors for biomedical soft robots: brief overview with impending challenges. Biomimetics, 3(3), 15. https://doi.org/10.3390/biomimetics3030015
Ionov, L. (2014). Hydrogel-based actuators: Possibilities and limitations. Materials Today, 17(10), 494–503. https://doi.org/10.1016/j.mattod.2014.07.002
Li, G., Chen, X., Zhou, F., Liang, Y., Xiao, Y., Cao, X., Zhang, Z., Zhang, M., Wu, B., Yin, S., Xu, Y., Fan, H., Chen, Z., Song, W., Yang, W., Pan, B., Hou, J., & Yang, W. (2021). Self-powered soft robot in the Mariana Trench. Nature, 591(7848), 66–71. https://doi.org/10.1038/s41586-020-03153-z
Yuk, H., Lin, S., Ma, C., Takaffoli, M., Fang, N. X., & Zhao, X. (2017). Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nature Communications, 8(1), 14230. https://doi.org/10.1038/ncomms14230
Homberg, B. S., Katzschmann, R. K., Dogar, M. R., & Rus, D. (2019). Robust proprioceptive grasping with a soft robot hand. Autonomous Robots, 43(3), 681–696. https://doi.org/10.1007/s10514-018-9754-1
Yu, Y., Li, J., Solomon, S. A., Min, J., Tu, J., Guo, W., Xu, C., Song, Y., & Gao, W. (2022). All-printed soft human-machine interface for robotic physicochemical sensing. Science Robotics. https://doi.org/10.1126/scirobotics.abn0495
Thuruthel, T. G., Gilday, K., & Iida, F. (2020). Drift-free latent space representation for soft strain sensors. 2020 3rd IEEE International Conference on Soft Robotics, RoboSoft. https://doi.org/10.1109/RoboSoft48309.2020.9116021
Spielberg, A., Amini, A., Chin, L., Matusik, W., & Rus, D. (2021). Co-learning of task and sensor placement for soft robotics. IEEE Robotics and Automation Letters, 6(2), 1208–1215. https://doi.org/10.1109/LRA.2021.3056369
Wang, R., Wang, S., Du, S., Xiao, E., Yuan, W., & Feng, C. (2020). Real-time soft body 3D proprioception via deep vision-based sensing. IEEE Robotics and Automation Letters, 5(2), 3382–3389. https://doi.org/10.1109/LRA.2020.2975709
She, Y., Liu, S. Q., Yu, P., & Adelson, E. (2020). Exoskeleton-covered soft finger with vision-based proprioception and tactile sensing. In 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, IEEE. https://doi.org/10.1109/ICRA40945.2020.9197369
Dong, S., Yuan, W., & Adelson, E. H. (2017). Improved GelSight tactile sensor for measuring geometry and slip. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, IEEE. https://doi.org/10.1109/IROS.2017.8202149
Li, Y., Zhu, J.-Y., Tedrake, R., & Torralba, A. (2019). Connecting touch and vision via cross-modal prediction. In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE. https://doi.org/10.1109/CVPR.2019.01086
Sun, Z., Wang, S., Zhao, Y., Zhong, Z., & Zuo, L. (2022). Discriminating soft actuators’ thermal stimuli and mechanical deformation by hydrogel sensors and machine learning. Advanced Intelligent Systems, 4(9), 2200089. https://doi.org/10.1002/aisy.202200089
Thuruthel, T. G., & Iida, F. (2022). Multimodel sensor fusion for learning rich models for interacting soft robots. arXiv. https://doi.org/10.48550/arXiv.2205.04202
Jin, T., Sun, Z., Li, L., Zhang, Q., Zhu, M., Zhang, Z., Yuan, G., Chen, T., Tian, Y., Hou, X., & Lee, C. (2020). Triboelectric nanogenerator sensors for soft robotics aiming at digital twin applications. Nature Communications, 11(1), 5381. https://doi.org/10.1038/s41467-020-19059-3
Truby, R. L., Katzschmann, R. K., Lewis, J. A., & Rus, D. (2019). Soft robotic fingers with embedded ionogel sensors and discrete actuation modes for somatosensitive manipulation. In 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea (South), IEEE. https://doi.org/10.1109/ROBOSOFT.2019.8722722
Zhu, M., He, T., & Lee, C. (2020). Technologies toward next generation human machine interfaces: From machine learning enhanced tactile sensing to neuromorphic sensory systems. Applied Physics Reviews, 7(3), 031305. https://doi.org/10.1063/5.0016485
Zhang, Z., He, T., Zhu, M., Sun, Z., Shi, Q., Zhu, J., Dong, B., Yuce, M. R., & Lee, C. (2020). Deep learning-enabled triboelectric smart socks for IoT-based gait analysis and VR applications. npj Flexible Electronics, 4(1), 29. https://doi.org/10.1038/s41528-020-00092-7
Glauser, O., Panozzo, D., Hilliges, O., & Sorkine-Hornung, O. (2019). Deformation capture via soft and stretchable sensor arrays. ACM Transactions on Graphics, 38(2), 1–16. https://doi.org/10.1145/3311972
Li, G., Liu, S., Wang, L., & Zhu, R. (2020). Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Science Robotics. https://doi.org/10.1126/scirobotics.abc8134
Li, J., Dong, S., & Adelson, E. (2018). Slip detection with combined tactile and visual information. 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 7772–7777. https://doi.org/10.1109/ICRA.2018.8460495
Alspach, A., Hashimoto, K., Kuppuswamy, N., & Tedrake, R. (2019). Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation. In 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). IEEE. https://doi.org/10.1109/ROBOSOFT.2019.8722713
Lee, M. A., Zhu, Y., Zachares, P., Tan, M., Srinivasan, K., Savarese, S., Fei-Fei, L., Garg, A., & Bohg, J. (2020). Making sense of vision and touch: learning multimodal representations for contact-rich tasks. IEEE Transactions on Robotics, 36(3), 582–596. https://doi.org/10.1109/TRO.2019.2959445
Calandra, R., Owens, A., Jayaraman, D., Lin, J., Yuan, W., Malik, J., Adelson, E. H., & Levine, S. (2018). More than a feeling: learning to grasp and regrasp using vision and touch. IEEE Robotics and Automation Letters, 3(4), 3300–3307. https://doi.org/10.1109/LRA.2018.2852779
Yuan, W., Dong, S., & Adelson, E. (2017). GelSight: high-resolution robot tactile sensors for estimating geometry and force. Sensors, 17(12), 2762. https://doi.org/10.3390/s17122762
Huang, W., Huang, X., Majidi, C., & Jawed, M. K. (2020). Dynamic simulation of articulated soft robots. Nature Communications, 11(1), 2233. https://doi.org/10.1038/s41467-020-15651-9
Coevoet, E., Morales-Bieze, T., Largilliere, F., Zhang, Z., Thieffry, M., Sanz-Lopez, M., Carrez, B., Marchal, D., Goury, O., Dequidt, J., & Duriez, C. (2017). Software toolkit for modeling, simulation, and control of soft robots. Advanced Robotics, 31(22), 1208–1224. https://doi.org/10.1080/01691864.2017.1395362
Hu, Y., Liu, J., Spielberg, A., Tenenbaum, J. B., Freeman, W. T., Wu, J., Rus, D., & Matusik, W. (2019). ChainQueen: A real-time differentiable physical simulator for soft robotics. In 2019 International Conference on Robotics and Automation (ICRA). IEEE. https://doi.org/10.1109/ICRA.2019.8794333
Satheeshbabu, S., Uppalapati, N. K., Chowdhary, G., & Krishnan, G. (2019). Open loop position control of soft continuum arm using deep reinforcement learning. In 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, IEEE. https://doi.org/10.1109/ICRA.2019.8793653
Haarnoja, T., Zhou, A., Abbeel, P., & Levine, S. (2018). Soft Actor-Critic: Off-Policy maximum entropy deep reinforcement learning with a stochastic actor. Retrieved from http://arxiv.org/abs/1801.01290
Naughton, N., Sun, J., Tekinalp, A., Parthasarathy, T., Chowdhary, G., & Gazzola, M. (2021). Elastica: A compliant mechanics environment for soft robotic control. IEEE Robotics and Automation Letters, 6(2), 3389–3396. https://doi.org/10.1109/LRA.2021.3063698
Spielberg, A., Zhao, A., Du, T., Hu, Y., Rus, D., & Matusik, W. (n.d.). Learning-in-the-loop optimization: End-to-end control and co-design of soft robots through learned deep latent representations. 33rd Conference on Neural Information Processing Systems (NeurIPS 2019), Vancouver, Canada, pp. 8284–8294. https://hdl.handle.net/1721.1/129794
Huang, Z., Hu, Y., Du, T., Zhou, S., Su, H., Tenenbaum, J. B., & Gan, C. (2021). PlasticineLab: A soft-body manipulation benchmark with differentiable physics. arXiv. https://doi.org/10.48550/arXiv.2104.03311
Patange, A. D., & Jegadeeshwaran, R. (2021). Application of bayesian family classifiers for cutting tool inserts health monitoring on CNC milling. International Journal of Prognostics and Health Management. https://doi.org/10.36001/ijphm.2020.v11i2.2929
Li, J., Tian, A., Sun, Y., Feng, B., Wang, H., & Zhang, X. (2022). The development of a venus flytrap inspired soft robot driven by IPMC. Journal of Bionic Engineering. https://doi.org/10.1007/s42235-022-00250-9
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness, J., Bellemare, M. G., Graves, A., Riedmiller, M., Fidjeland, A. K., Ostrovski, G., Petersen, S., Beattie, C., Sadik, A., Antonoglou, I., King, H., Kumaran, D., Wierstra, D., & Hassabis, D. (2015). Human-level control through deep reinforcement learning. Nature, 518(7540), 529–533. https://doi.org/10.1038/nature14236
Sun, Z., Zhu, M., Zhang, Z., Chen, Z., Shi, Q., Shan, X., Yeow, R. C. H., & Lee, C. (2021). Artificial intelligence of things (AIoT) enabled virtual shop applications using self-powered sensor enhanced soft robotic manipulator. Advanced Science, 8(14), 2100230. https://doi.org/10.1002/advs.202100230
Cheng, Y., Zhang, R., Zhu, W., Zhong, H., Liu, S., Yi, J., Shao, L., Wang, W., Lam, J., & Wang, Z. (2021). A multimodal hydrogel soft-robotic sensor for multi-functional perception. Frontiers in Robotics and A, I, 8. https://doi.org/10.3389/frobt.2021.692754
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 62104034, the Natural Science Foundation of Hebei Province under Grant F2020501033, and Fundamental Research Fund for Central University under grant N2223032.
Author information
Authors and Affiliations
Contributions
Shuyu Wang obtained the funding and wrote most of the paper. Zhaojia Sun wrote a small part of the paper and edited it.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no conflict of interest.
Institutional Review Board Statement
Not applicable.
Informed Consent
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, S., Sun, Z. Hydrogel and Machine Learning for Soft Robots’ Sensing and Signal Processing: A Review. J Bionic Eng 20, 845–857 (2023). https://doi.org/10.1007/s42235-022-00320-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-022-00320-y