
Abstract
There are significant advantages to investigate underwater attachments, which would be valuable in providing inspirations and design strategies for multi-functional surfaces and underwater robots. Here, an abalone-inspired sucker integrating an elastic body and a membrane structure is proposed and fabricated filled with rigid quartz particles to adjust the backing stiffness of the contact like abalone. The membrane is used to conform and contact surfaces well, the center area of which can be pulled in exposed to a negative pressure differential, to create a suction cavity. The pulling experiments indicate that the sucker can adhere to three-dimensional surfaces with both suction and adhesion mechanisms in both dry and liquid environments. The switching between soft/hard contact states leads to the change of adhesive strength over 30 times. Furthermore, we provide theoretical analysis on how the sucker work well in both dry and liquid environments. Finally, the developed sucker can easily lift up smooth planar objects and 3D objects, and can grip objects both smaller and larger than the size of the sucker, which have a difficulty for conventional suckers or friction-based grippers. The potential application of the sucker in flexible transfer robot is demonstrated on various surfaces and environments, paving the way for further bio-inspired adhesive designs for both dry and wet scenarios.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Grippers for diverse wet and dynamic surfaces are widely involved in robotics, transfer printing and precision manufacturing. However, conventional multifinger grippers [1,2,3] or vacuum suction-based grippers [4,5,6] are limited to their fixed shape and one single grasping mode, facing difficulties to fulfill all the tasks. In addition, multifinger grippers consisting of a large number of joints, which are difficult to control. Gripping flat, curved, narrow, or profiled design of objects still poses challenges to conventional robots, while the above-mentioned issues of robotic grippers may be overcome by adhesion and flexible grippers.
Flexible grippers showing the advantages of more powerful adaptability to objects of varying shapes and size have become more popular in recent years. Several materials and methods have been applied to flexible grippers to realize variable stiffness, such as heat-sensitive function material [7], magnetorheological fluid (MRF) [8], dielectric elastomers (DEAs) [9], and particle jamming [10,11,12]. Particle jamming, as a mechanism that enables particles to act like a liquid, solid, or something in between, can be activated by air pressure, leading to system simplicity. Therefore, jamming has been identified as a powerful enabling technology for soft robotics. The basic design is a ball-type membrane filled with particle grains [13]. For instance, Brown et al. [14, 15] designed ball-shaped jamming grippers, which can achieve their versatility and remarkable holding strength through a combination of friction, suction, and geometrical interlocking mechanisms. Wang et al. [16] proposed an inflatable particle-jamming gripper based on a novel grasping strategy of integrating the positive pressure and partial filling. Li et al. [17] designed a gripper with adhesion control based on the jamming of granular materials filled inside a hemispherical adhesive membrane. Besides, because that the ball-shaped jamming grippers have challenges in lifting flat objects up efficiently, diverse novel manipulator designs and application based on the jamming mechanism have been explored, such as nubbed grippers [18], multifingered and multichamber constructs [19,20,21], jamming paws for legged locomotion [22, 23], sea sampling tools [24]. It is known that jamming performance is affected by myriad variables related to both grain (material, size, geometry, and mixing ratios) and membrane (material, patterning, and morphology). Therefore, the flexible and efficient application of manipulator in different environments can be realized based on the optimization of various parameters.
Adhesion is the interface attraction between two surfaces and a variety of different mechanisms may contribute to adhesion, for example, van der Waals forces, capillary forces, viscous forces, mechanical interlocking, glue (through chemical bonding), friction and suction [25], which can perform independently or synergistically. In nature, animals such as geckos, tree frogs, and octopuses provide important sources to develop adhesion systems due to their remarkable adhesion performances. Li et al. [26] presented a versatile self-adaptive gripper with a controllable load sharing design based on gecko-inspired controllable adhesion. Song et al. [27] invented an inflatable membrane gripper with a rigid body and a membrane covered with gecko-inspired mushroom-shaped microfiber to pick and place complex and fragile non-planar or planar parts. Nguyen et al. [28] fabricated a robotic hand inspired by the wet adhesion mechanism of tree frog toes in a wet environment. Baik et al. [29] developed highly adaptable, biocompatible, and repeatable adhesive patches with unfoldable 3D microtips in micropillars inspired by the rim and infundibulum of an octopus suction cup. Wang et al. [30] designed a novel magnetically actuated, energy-efficient smart adhesive with rapidly tunable, highly switchable, and highly reversible adhesive strength inspired by the elastic energy storage mechanism in octopus suckers. Jessica et al. [31] created a suction disk that functions in and out of water to grip rough and irregular surfaces without necessitating sustained actuation inspired by the clingfish. Despite extensive existing studies on artificial adhesives, most of these adhesives cannot tune their stiffness like animals. Note that adhesion is still difficult to achieve switchable high normal adhesive strength on rough surfaces both in air and underwater.
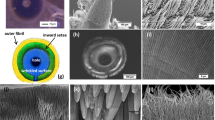
Abalone can achieve strong attachment while adsorb on reefs at the bottom of the sea, which has also provided novel inspiration to develop adhesion systems. In our pervious study [32], the adhesion mechanisms of abalone were studied. During measuring the adhesive force of abalone, we found that the abalone will drain the bubbles by spreading the foot while adhering to a substrate, and remove the excessive water at the same time to form pressure difference. In earlier stage of pulling, its flexible body increases the work consumption by stretching and deformation, and a suction cavity with a negative pressure can exist. With the increase in the pulling force, the gastropod of abalone can independently adjust the stiffness to maintain the stability of adhesion. Therefore, both the suction force and adhesive force will be the resistance force to the external pulling (Fig. 1a, b). The adhesive force mainly results from its secreted mucus and bottom gastropods with micron bristles on the surface (Fig. 1c). Based on the response mechanisms of abalone to the normal pulling force, we design a sucker consisting of an elastic body, a viscoelastic membrane (as shown in Fig. 1d), and granular materials. The elastic body mimicking the abalone body can deform during pulling and resist the external pulling force. The granular materials are used to adjust stiffness of the sucker like abalone. The viscoelastic membrane with/without microstructures like the gastropods of abalone is used to conform and contact surfaces well. When exposed to a negative pressure differential (ΔPi), a subtraction of the atmospheric pressure (Patm) from internal pressure (Pi), ΔPi causes the center area of the membrane to be pulled in, creating a suction cavity. Herein, we fabricate the jamming sucker molded with PDMS in a custom 3D-printed mold. Furthermore, pulling experiments of the sucker on both 3D and flat surfaces are conducted. We found an interesting result that the sucker can use different grasping mechanisms with respect to different substrates and environments. We also provide theoretical analysis on how the interfacing membrane can improve the suction performance. Finally, we designed a four-finger manipulator by combination of flexible sucker and mechanical structures to realize the effective grasping and adhesion of the objects with different shapes in various environment.

Adhesion morphology, structure, and bionic suction cup inspiration of abalone. a Right optical microscopic images of an abalone. b A schematic abalone adhesion. c Microstructures of the Gastropod surface. d Illustration of the smart adhesive sucker
2 Materials and Methods
2.1 Fabrication of the Bioinspired Smart Adhesive Sucker
The negative mold used to fabricate the elastic body of the sucker was designed using computer-aided design software (SolidWorks) and manufactured from rigid material (photosensitive resin) on a 3D printer. Then, a high formulation of liquid PDMS (10:1, prepolymer/cross-linker agent) was poured into the mold, degassed in a vacuum chamber for 30 min and baked in an oven at 75 °C for 4 h. After demolding, an elastic body was obtained. Its basal plane diameter was 19 mm, and the top was connected to a hollow cylindrical structure with an inner diameter of 3.2 mm. Repeating the molding process as shown in Fig. 2b, the viscoelastic membrane (≈ 0.5 mm in thickness) was obtained from a low formulation of PDMS (25:1, prepolymer/cross-linker agent). The mixture of prepolymer PDMS and cross-linker Sylgard 184 was mixed, degassed, poured onto a flat wafer without any pattern or a wafer with hexagonal or cylinder micropattern, and cured for 16 h at 60 °C. The height of two kinds of micro-columns is 25 μm. The diameter of the cylinder is 60 μm, and the center distance between two cylinders is 80 μm. The side length of regular hexagonal prism is 30 μm, and the center distance between two six prisms is 72 μm. After cooling to room temperature, the viscoelastic membrane was carefully peeled from the wafer. Finally, the elastic body and the viscoelastic membrane were bonded together by PDMS to form a chamber between them. A leak valve was used to isolate granular materials and let the air pass. Approximately, 0.8 g of granular materials (200-mesh quartz particles) was loosely filled inside the chamber. The sucker was connected to a syringe pump to control the system internal pressure.

Fabrication process of a sucker. a Elastic body molded with PDMS (10:1) in a custom 3D-printed mold. b Fabrication of the viscoelastic membrane (25:1 PDMS) c Assembly of the sucker. The elastic body and the viscoelastic membrane are bonded by PDMS, and the inner chamber of the sucker is filled with quartz particles. d Cross section of the 3D assembly of the proposed sucker from the side. 1: Vent pipe, 2: elastic body, 3: viscoelastic membrane, 4: granular materials, and 5: leak valve. e Microstructures of the viscoelastic membrane. 1: Cylinder; 2: Hexagonal prism
2.2 Adhesion Measurements
The sucker samples were attached onto glass substrates (smooth\cracked\curved) with a preload force and pre-inflated, then pulled up after pumping air until failure occurred in the pull-off direction. This was done using a force-measuring machine (HYPX-601, Hengyuan Sensor Technology Company, Anhui China) with a minimum accuracy of 2 mN for data exports from PC. The pulling speed was 1 mm/s. The whole measurement process was recorded by a force sensor and monitored using an optical camera. The test was repeated at least five times. Before the force measurement, sprinkle micron iron powder on the glass ball surface. After the sucker was pulled off, the area where the iron powder adheres to the bottom surface of the sucker is the contact area. We take this contact radius approximately as the cavity radius generated by negative pressure.
3 Results and Discussion
3.1 Structure and Mechanism of the Sucker
Figure 2c details the structural features of the sucker, which consists of an elastic body (PDMS, 10:1(Fig. 2a), a viscoelastic membrane (PDMS, 25:1 Fig. 2b), granular materials (200-mesh quartz particles), a vent pipe, and a leak valve. The membrane and elastic body are approximately 20 mm in diameter and 500 μm and 1 mm in thickness, respectively. As shown in Fig. 2c, the viscoelastic membrane is supported by the soft, deformable elastic body with a chamber, which is connected to a syringe pump through a vent pipe to control the internal pressure. The valve is installed at the end of the vent pipe to isolate granular materials and let air pass (Fig. 2d). The chamber is filled with granular materials to mimic the gastropods of abalone, which can control the backing stiffness based on jamming. In addition, we designed two different kinds of columnar microstructures (cylindrical/hexagonal columnar) on the membrane as shown in Fig. 2e to attempt to improve adhesion performance of the sucker.
The working process and principle of the sucker are shown in Figs. 3a and b, and the gripping process consists of five steps. First, air is filled into the sucker chamber to expand the sucker. Second, the sucker approaches and contacts the target surface and applies a preload force Fpre. Thus, the granular materials flow, and the elastic body is deformed due to the preload, which will induce the membrane to adapt and adhere to the 3D surface or plane surface. Third, air is pumped out from the chamber to form a pressure differential (ΔPi) to jam the granular materials inside the sucker, and the body is in a hard state. Fourth, the sucker is pulled in the normal direction. When the target surface is smooth, as shown in Fig. 3a, granular materials flow due to the deformation of the body, and ΔPi causes the center area of the membrane to be pulled in, creating a suction cavity at the contact interface. Thus, the sucker adheres to the target surface through both the adsorption of a negative-pressure cavity and adhesion force of the membrane, which is significantly affected by dry or wet surface conditions. Conversely, when the target surface is cracked, porous or two different objects, as shown in Fig. 3b, the body keeps the hard state, and the granular materials keep jamming, resulting in the sucker adhering to the target surface by the viscoelastic membrane without the adsorption of the cavity. In release, air is filled into the chamber to induce the body to return to its soft state, and the sucker detaches from the adhered surface.

Basic mechanisms and adhesion characterization of the sucker. a, b Schematic of the grasping process on the surface. 1: Charge air, 2: Preload the applied initial pressure, 3: Extract air, 4: Lift the suction cup for adhesion to objects, and 5: Fill air to release the suction cup. c Representative force measurement
Figure 3c shows a representative reaction force (F) measurement of the sucker as a function of time. First, the sucker is prefilled with 0.2 ml of air and brought to contact the glass substrate with a compressive preload force (Fpre). The preload is the maximum reaction force with a value of 3.5 N. Then, a negative pressure differential is applied to the inside of the chamber with a value of − 80 kPa, and the system is slowly retracted at a velocity of 1 mm/s. The reaction force decreases during pulling until it reaches the maximum value of 4.3 N in the negative direction on the smooth surface, which can be named the adhesive force (Fadh), and the sucker detaches from the substrate instantaneously, while a smaller adhesive force (Fadh) on the cracked surface is achieved due to without the adsorption effect of the cavity.
3.2 Effect of Parameters of the Sucker on Adhesion
The sucker adheres to the target surface through both the adsorption of a negative-pressure cavity and adhesive force of the membrane. In order to isolate the microstructures contributions from the suction cavity, we investigated the adhesion of the membrane (covered with Hexagonal prism or cylinder) with rigid backing, as shown in Fig. 4a in mode 1. As shown in Fig. 4b, the adhesive strengths of the three kinds of membranes (the Hexagonal prism, cylinder, and flat structure) were very different, with values of 19, 18, and 41 kPa in air and 3.3, 3.3, and 3 kPa underwater, respectively. It is obvious that the adhesive strength of the flat structure is up to 2 times higher than the cases of the hexagonal prism and cylinder structure in dry conditions. The reason that the flat membrane performs better is primarily due to the larger contact area with the substrate. The van der Waals force is greatly reduced due to the intervention of water molecules underwater. Therefore, the adhesive strength of the microstructured and flat membrane is greatly reduced. This also indicates that the sucker directly adhered only by the membrane without suction effect cannot be used in the liquid environment. In addition, it is found that the effect of the two kinds of microstructures on the adhesion of the sucker is consistent. Therefore, we only studied the membrane with hexagonal prism structure in the following work.

Effect of parameters of the sucker on adhesion. a Different modes of suckers in adhesion measurements 1: Sucker with hard backing. 2: Sucker with flat structure on membrane. 3: Sucker with hexagonal prism structure on membrane. b The effect of microstructures on the adhesion of sucker with hard backing c Adhesion strength of different particle sizes. d Effect of particle filling on sucker adhesion with different substrate e Adhesive strength as a function of pressure differential (ΔPi). Here, σ0 is the adhesive strength at a pressure difference of 0 kPa. f Adhesive strength as a function of pressure differential (ΔPi) (The membrane of the sucker covered with a hexagonal columnar microstructure)
The parameters of filling particles also have important influence on the adhesive strength. Figure 4c shows the adhesive strength of the sucker (mode 2 in Fig. 4a) on the smooth and cracked surface with different sizes of particles. The adhesive strength of the sucker filled with particles of 200 mesh (with diameter of ~ 0.074 mm) is greater than that of 60 mesh (with diameter of ~ 0.25 mm) whether on the smooth surface or the cracked surface. The diameter of 60 mesh particles is on the order of the thickness of the bottom membrane (0.5 mm) of the sucker; thus, the bottom membrane will form an uneven shape in the adhesion area, resulting in the reduction in the contact area during adhesion. Besides, it is difficult to form a perfect sealing between the uneven membrane and the substrate, Therefore, 200 mesh quartz particles are chosen as the internal granular materials of the sucker.
The effects of filling amount of particles on adhesion to smooth and cracked (glass sheet with crack width of 1 mm) surfaces were investigated. As shown in Fig. 4d, the adhesive strength decreases with the increase in the filling amount on a smooth plane. Though the contact area of the sucker will increase due to increasing the filling amount of the particles, corresponding to the reduction in the cavity at the contact interface, and the suction force will be significantly reduced. But on the other hand, the particles can help the membrane of the sucker well-adapt and adhere to the 3D, cracked of porous surfaces. When adhered to the surface with cracks, the adhesive force is almost 0 when the filling amount is small. While the adhesive strength increased with the increase in filling amount, as the contact area at the bottom of the sucker increases. The adhesive force decreased a little with a filling amount of 0.9 g. This may be that too much granular materials may affect the jam and flow effect. The results indicate that the filling particles mainly increase the effect of adhesion of the membrane and decrease the suction effect. In order to make the sucker adapt to 3D surface well, we choose the filling amount of 0.8 g.
In addition, we explored the effect of preload and pressure difference (∆Pi) on adhesion of the bionic sucker with flat and hexagonal prism structure membranes, as shown in mode 2 and 3 of Fig. 4a. The granular materials will flow when receiving a preload force, and the elastic body and membrane can be deformed and contact the substrate well. As a result, the preload has little effect on the sucker adhesion. While the adhesive strength increases as the pressure difference increases. The particles inside the sucker squeeze each other, which increases the backing stiffness of the membrane and affects the final adhesion performance of the sucker. This phenomenon is similar to abalone maintaining the adhesion by increasing the stiffness of the gastrofoot edge during pulling. When the pressure difference is zero, the sucker is in a soft state with an adhesive strength of 0.1 kPa during pulling. While air was pumped out from the sucker inside to form a negative pressure to induce the jamming of the granular materials inside the sucker in jammed hard state. As shown in Fig. 4e, the change of adhesive strength based on jamming of granular materials can be over 17 times between 0 and 20 kPa. At 80 kPa, the adhesive strength could be up to 30 times. The growth trend tends to be weak when pressure difference is big.
Furthermore, we explored the influence of pressure difference (∆Pi) and preload on sucker with membrane covered with hexagonal columnar microstructures, as shown in Fig. 4f. The adhesive strength of the sucker with microstructures is smaller than the sucker with flat membrane, which is only approximately 6 kPa. In addition, the adhesive strength change could be only up to 8 times between soft and jammed hard state. This may be that the sucker cannot form a perfect sealing between the membrane and the substrate because of the microstructures. On the other hand, the effective contact area is smaller than sucker with flat membrane.
3.3 Characterization of the Sucker
The adhesive strength and cavity radius are measured to investigate the adhesion performance of the sucker on the 3D surfaces (spheres with different diameters), as shown in Fig. 5. Note that the adhesive strength and the cavity radius both increase with the diameter of the target surface (Fig. 5a, b). Since the size of the sucker is constant, the contact radius increases slowly when the diameter of the sphere increases, resulting in the same growth trend of the adhesive strength. The results indicate that the sucker has a good ability to adapt to 3D surfaces but has a relatively smaller adhesive force on small objects.

Influence of the environment and substrate on adhesion performance. a Influence of target surface curvature on adhesion performance and cavity radius. b The size of suction cavity between the sucker and the surface with different diameters. Here, the symbol “∞” represents that the adhesive substrate is a plane. c Influence of the environment and target surface type on adhesion performance
Figure 5c describes the adhesion performance of the sucker to surfaces with and without cracks in dry, underwater (viscosity of 1.005 × 10–3 Pa s) and oil (Xilong Scientific Co. Ltd.; viscosity of 0.35 Pa s) environments. On the smooth surface, the adhesive strength under oil is the largest, with a value of approximately 38 kPa, and the adhesive strength in dry and underwater environments is almost the same, with a value of approximately 28 kPa. It can be seen that the sucker shows good adhesion in liquid environment. On the cracked surface, the adhesive strength of the sucker decreases dramatically, which can be ascribed to the inability to form a negative-pressure cavity on the contact interface. Without the effect of negative pressure in a dry environment, the adhesive strength with a value of 8 kPa mainly stems from the van der Waals force of the viscoelastic membrane. Because the van der Waals force decreases drastically underwater, the adhesive strength underwater is close to 1 kPa, and the value under oil decreases to 6 kPa.
The adhesive strength of the sucker with membrane covered with hexagonal columnar microstructures only decrease from 6 to 5 kPa in dry environment owing to slight variations in contact interface, which indicates no suction cavity existing at the contact interface.
In the experiments, the adhesive force of sucker on cracked surface has no suction effect. Therefore, we can define λ as the proportion of suction force in the total adhesive strength, it could be obtained as follows:
where σcracked is the adhesive strength of the sucker on the crack surface measured in experiments, σsmooth is the adhesive strength of the sucker on the crack surface measured.
As shown in Fig. 5c, the suction force dominates in underwater conditions, accounting for 98% of the total adhesive strength tested experimentally. And in dry conditions, the suction force accounted for 73% of the total adhesive strength tested in the experiments.
To give a quantitative result, the adhesive strength σ of the sucker under different conditions can be estimated as:
where σvan, σs and σc are the van der Waals force induced by the membrane, the suction force, and the capillary force, respectively. The van der Waals force could be calculated by the theory proposed by Carbone et al. [33] as follows:
where Δγ is the interfacial adhesion work of PDMS to the glass substrate (∼ 45 mJ/m2), E is the elastic modulus of PDMS (∼ 2.1 MPa), and μ is Poisson’s ratio of PDMS (∼ 0.45). rv and r are the radius of the cavity and membrane, respectively. In experiments, rv is roughly equivalent to the radius of the contact area. The suction stress induced by the negative differential pressure of the cavity can be written as:
where ΔP is the interfacial pressure at the contact interface with a value of approximately ΔPi in the previous experiments. The capillary force could be obtained as follows [34]:
where γ is the surface tension of water (∼ 0.072 J/m2) or oil (∼ 0.021 J/m2), θ1 is the contact angle on the PDMS substrate, θ2 is the contact angle on the glass substrate, and h is the height of the liquid film (∼ 0.5 μm).
Figure 6a and b shows the schematic diagram of the pulling process between the sucker and glass substrate in air and liquid environment, respectively. Herein, to ensure that the calculation is performed under saturated adhesion, only the case where the preload makes the sucker contact the substrate completely was considered. In a dry environment, the adhesion force is the combination of suction stress σs and van der Waals force σvan, and deduced as \(\sigma = \sigma_{{{\text{van}}}} + \sigma_{{\text{s}}}\), as shown in Fig. 6c. Theoretical suction stress increases with the cavity radius, while van der Waals force decreases with the increasing cavity radius. When the radius of the suction cup cavity is very small, van der Waals force makes the main contribution. With the increase in the cavity radius, the suction of the suction cup begins to dominate, so the adhesion curve first decreases and then increases.

Pull-off process of the sucker and predicted adhesive model. a Schematic of the pull-off process of the sucker from the glass substrate in air. b Schematic of the pull-off process of the sucker from the glass substrate underwater. c The predicted total adhesion of suckers with different features in air. d The predicted total adhesion suckers with different features underwater. e The predicted total adhesion suckers with different features under oil
In a liquid environment, the only difference being that the contact interface is replaced by a liquid film, so the van der Waals force gets replaced by capillary force σc in adhesion. The final adhesion force is the combined result of the suction stress and capillary force: \(\sigma { = }\sigma_{{\text{s}}} + \sigma_{{\text{c}}}\). Theoretical capillary force decreases with the increasing cavity radius. As shown in Fig. 6d, the predicted adhesion increases with the increasing cavity radius because that suction stress increases faster with the increase in cavity radius. Again, the same trend under oil is shown in Fig. 6e. It is noted that the predicted adhesion values both underwater and under oil are greater than the experimental values, as perfect contact and sealing condition of interface cannot be formed in liquid environment reality. Meanwhile, a rational liquid bridge may not be achieved at the interface in the experiments, so the capillary force was less than the theoretical value. However, the prediction of the adhesion trend of suckers in different environments is consistent.
3.4 Manipulation of Objects in Dry and Wet Environments
The combination of adhesive membranes, elastic bodies, and granular materials with rapidly tunable stiffness opens opportunities to adhere to and grip diverse objects. To demonstrate this utility, we picked, held, and controllably released six different irregularly shaped everyday objects, including a Si wafer, the top and side of a battery, a glass sheet with a 1-mm-wide crack, and a glass ball (dry and underwater) (Fig. 7). First, the inflated sucker is pressed on the target surface, and the air in the suction cup is extracted to adhere to the target surface. With the aid of the pressure differential and membrane adhesion, the target object is successfully lifted by the sucker and held for more than 1 min.

Demonstrations of the smart adhesive for manipulating common objects with various surfaces in both dry and wet conditions. a Si wafer (1.8 g) b Side of a battery (24 g) c Top of the battery (24 g) d A glass sheet with a 1-mm-wide crack (25 g) e Glass ball (dry environment, 290 g) f Glass ball (underwater environment, 290 g)
Finally, the sucker is inflated to release the object, which demonstrates the great switching ability of the sucker. Conventional friction-based grippers have a difficulty in handling large and flat objects. In case of objects smaller than the suction cup size, conventional vacuum suckers have a difficulty as their suction area needs to be fully sealed. These examples demonstrate the wide applicability of this sucker with various substrates in both dry and wet environments. Theoretically, the sucker can maintain a long-term adhesion to the substrate when the target surface is smooth. We tested the adhesion performance of the sucker adheres to a glass sheet. The glass sheet is still firmly adhered to the bottom of the sucker after 16 h. But when there is an extremely rough surface, the deformable and thin membrane may adapt to the part of roughness by the pressure at the interface, while air may slowly penetrate into the contact interface and the suction cavity, resulting in adhesion decline. Therefore, it is a challenge to maintain the long-term adhesion and robustness like that of biology, and it is also where we will focus on in the future work.
3.5 Mechanical Claw Structure Design
The sucker can be used as an excellent flexible end effector, combined with a rigid mechanical structure. The softness and mechanical compliance of the sucker itself can be used to reduce the complexity of control. For this purpose, a four-finger mechanical claw combining a rigid mechanical structure and a flexible suction cup end of a smooth base membrane is designed. The device can achieve good grasping for both large-size flat objects and small-size non-planar objects. As shown in Fig. 8, the mechanical grasping can successfully grasp glass balls and flat glass plates.

Application of multifingered robotic hand with adhesive flexible gripper. a Glass ball and b glass sheet
4 Conclusions
In this study, we fabricated and investigated a membrane-based suction and jamming sucker inspired by the functions of the attaching of abalone. The pulling experiments shows that different adhesive strength during pulling off could be achieved by controlling pressure inside the sucker. Adhesion performance and theoretical analysis demonstrate that the sucker induces a robust attachment to various flat, rough, and curved subjects in both dry and underwater environments. In addition, we design a multifingered mechanical gripper structure to verify the feasibility of grasping objects. The development of manipulators and integrating them with our sucker could provide greater degrees of freedom and an overall flexibility in its movement, which may provide inspiration for industrial transport systems and exploration robotics for harsh environments.
Data Availability Statements
All data generated or analyzed during this study are included in this published article.
References
Golan, Y., Shapiro, A., & Rimon, E. D. (2020). A variable-structure robot hand that uses the environment to achieve general purpose grasps. IEEE Robotics and Automation Letters, 5(3), 4804–4811. https://doi.org/10.1109/LRA.2020.3003885
Bazhinova, K. V., Leskov, A. G., & Seliverstova, E. V. (2019). Automatic grasping of objects by a manipulator equipped with a multifinger hand. Journal of Computer and Systems Sciences International, 58(2), 317–327. https://doi.org/10.1134/S1064230719020035
Harada, K., Nagata, K., Rojas, J., Ramirez-Alpizar, I. G., Wan, W., Onda, H., & Tsuji, T. (2016). Proposal of a shape adaptive gripper for robotic assembly tasks. Advanced Robotics, 30(17–18), 1186–1198. https://doi.org/10.1080/01691864.2016.1209431
Cheng, P. L., Ye, Y. Z., Jia, J. M., Wu, C. Y., & Xie, Q. Z. (2021). Design of cylindrical soft vacuum actuator for soft robots. Smart Materials and Structures, 30(4), 45020. https://doi.org/10.1088/1361-665X/abeb2f
Fujita, M., Ikeda, S., Fujimoto, T., Shimizu, T., Ikemoto, S., & Miyamoto, T. (2018). Development of universal vacuum gripper for wall-climbing robot. Advanced Robotics, 32(6), 283–296. https://doi.org/10.1080/01691864.2018.1447238
Cui, Y. F., Liu, X. J., Dong, X. G., Zhou, J. Y., & Zhao, H. C. (2021). Enhancing the universality of a pneumatic gripper via continuously adjustable initial grasp postures. IEEE Transactions On Robotics, 37(5), 1604–1618. https://doi.org/10.1109/TRO.2021.3060969
Coulson, R., Stabile, C. J., Turner, K. T., & Majidi, C. (2021). Versatile soft robot gripper enabled by stiffness and adhesion tuning via thermoplastic composite. Soft Robotics. https://doi.org/10.1089/soro.2020.0088
Hartzell, C. M., Choi, Y. T., Wereley, N. M., & Leps, T. J. G. (2019). Performance of a magnetorheological fluid-based robotic end effector. Smart Materials and Structures, 28(3), 35030. https://doi.org/10.1088/1361-665X/aafe2b
Li, W. B., Zhang, W. M., Zou, H. X., Peng, Z. K., & Meng, G. (2019). Bioinspired variable stiffness dielectric elastomer actuators with large and tunable load capacity. Soft Robotics, 6(5), 631–643. https://doi.org/10.1089/soro.2018.0046
Yang, Y., Li, Y. Q., Chen, Y. H., Li, Y. T., Ren, T., & Ren, Y. (2020). Design and automatic fabrication of novel bio-inspired soft smart robotic hands. IEEE Access, 8, 155912–155925. https://doi.org/10.1109/ACCESS.2020.3019083
Zhao, Y. Z., Shan, Y., Zhang, J., Guo, K. D., Qi, L. Z., Han, L. G., & Yu, H. N. (2019). A soft continuum robot, with a large variable-stiffness range, based on jamming. Bioinspiration & Biomimetics, 14(6), 66007. https://doi.org/10.1088/1748-3190/ab3d1b
Li, Y. T., Chen, Y. H., Yang, Y., & Wei, Y. (2017). Passive particle jamming and its stiffening of soft robotic grippers. IEEE Transactions on Robotics, 33(2), 446–455. https://doi.org/10.1109/TRO.2016.2636899
Wei, Y., Chen, Y. H., Ren, T., Chen, Q., Yan, C. X., Yang, Y., & Li, Y. T. (2016). A novel, variable stiffness robotic gripper based on integrated soft actuating and particle jamming. Soft Robotics, 3(3), 134–143. https://doi.org/10.1089/soro.2016.0027
Amend, J. R., Brown, E., Rodenberg, N., Jaeger, H. M., & Lipson, H. (2012). A positive pressure universal gripper based on the jamming of granular material. IEEE Transactions on Robotics, 28(2), 341–350. https://doi.org/10.1109/TRO.2011.2171093
Brown, E., Rodenberg, N., Amend, J., Mozeika, A., Steltz, E., Zakin, M. R., Lipson, H., & Jaeger, H. M. (2010). Universal robotic gripper based on the jamming of granular material. Proceedings of the National Academy of Sciences, 107(44), 18809–18814. https://doi.org/10.1073/pnas.1003250107
Wang, Y. J., Yang, Z. W., Zhou, H., Zhao, C., Barimah, B., Li, B., Xiang, C. Q., Li, L. J., Gou, X. F., & Luo, M. Z. (2021). Inflatable particle-jammed robotic gripper based on integration of positive pressure and partial filling. Soft Robotics. https://doi.org/10.1089/soro.2020.0139
Li, L. Z., Liu, Z. Y., Zhou, M., Li, X. X., Meng, Y. G., & Tian, Y. (2019). Flexible adhesion control by modulating backing stiffness based on jamming of granular materials. Smart Materials and Structures, 28(11), 115023. https://doi.org/10.1088/1361-665X/ab46f3
Kapadia, J., & Yim, M. (2012). Design and performance of nubbed fluidizing jamming grippers. In: 2012 IEEE international conference on robotics and automation (pp. 5301–5306). https://doi.org/10.1109/ICRA.2012.6225111
Zhou, J. S., Chen, Y. H., Hu, Y., Wang, Z., Li, Y. Q., Gu, G. Y., & Liu, Y. H. (2020). Adaptive variable stiffness particle phalange for robust and durable robotic grasping. Soft Robotics, 7(6), 743–757. https://doi.org/10.1089/soro.2019.0089
Yang, Y., Zhang, Y. Z., Kan, Z. C., Zeng, J. L., & Wang, M. Y. (2020). Hybrid jamming for bioinspired soft robotic fingers. Soft Robotics, 7(3), 292–308. https://doi.org/10.1089/soro.2019.0093
Song, E. J., Lee, J. S., Moon, H., Choi, H. R., & Koo, J. C. (2021). A Multi-Curvature, variable stiffness soft gripper for enhanced grasping operations. Actuators, 10(12), 316. https://doi.org/10.3390/act10120316
Hauser, S., Eckert, P., Tuleu, A., & Ijspeert, A. (2016). Friction and damping of a compliant foot based on granular jamming for legged robots. pp. 1160–1165. https://doi.org/10.1109/BIOROB.2016.7523788
Chopra, S., Tolley, M. T., & Gravish, N. (2020). Granular jamming feet enable improved foot-ground interactions for robot mobility on deformable ground. IEEE Robotics and Automation Letters, 5(3), 3975–3981. https://doi.org/10.1109/LRA.2020.2982361
Licht, S., Collins, E., Mendes, M. L., & Baxter, C. (2017). Stronger at depth: Jamming grippers as deep sea sampling tools. Soft Robotics, 4(4), 305–316. https://doi.org/10.1089/soro.2017.0028
Chen, Y. P., Meng, J. X., Gu, Z., Wan, X. Z., Jiang, L., & Wang, S. T. (2019). Bioinspired multiscale wet adhesive surfaces: Structures and controlled adhesion. Advanced Functional Materials, 30(5), 1905287. https://doi.org/10.1002/adfm.201905287
Li, X. S., Li, X. X., Li, L. Z., Meng, Y. G., & Tian, Y. (2021). Load sharing design of a multi-legged adaptable gripper with Gecko-inspired controllable adhesion. IEEE Robotics and Automation Letters, 6(4), 8482–8489. https://doi.org/10.1109/LRA.2021.3107603
Song, S., Majidi, C., & Sitti, M. (2014). GeckoGripper: A soft, inflatable robotic gripper using gecko-inspired elastomer micro-fiber adhesives (pp. 4624–4629). https://doi.org/10.1109/IROS.2014.6943218
Nguyen, P., & Ho, V. A. (2019). Grasping interface with wet adhesion and patterned morphology: Case of thin shell. IEEE Robotics and Automation Letters, 4(2), 792–799. https://doi.org/10.1109/LRA.2019.2893401
Baik, S., Kim, J., Lee, H. J., Lee, T. H., & Pang, C. (2018). Highly adaptable and biocompatible octopus-like adhesive patches with meniscus-controlled unfoldable 3D microtips for underwater surface and hairy skin. Advanced Science, 5(8), 1800100. https://doi.org/10.1002/advs.201800100
Wang, S. H., Luo, H. Y., Linghu, C. H., & Song, J. Z. (2021). Elastic energy storage enabled magnetically actuated, octopus-inspired smart adhesive. Advanced Functional Materials, 31(9), 2009217. https://doi.org/10.1002/adfm.202009217
Sandoval, J. A., Jadhav, S., Quan, H., Deheyn, D. D., & Tolley, M. T. (2019). Reversible adhesion to rough surfaces both in and out of water, inspired by the clingfish suction disc. Bioinspiration & Biomimetics, 14(6), 66016. https://doi.org/10.1088/1748-3190/ab47d1
Li, J., Zhang, Y., Liu, S., & Liu, J. L. (2018). Insights into adhesion of abalone: A mechanical approach. Journal of the Mechanical Behavior of Biomedical Materials, 77, 331–336. https://doi.org/10.1016/j.jmbbm.2017.09.030
Carbone, G., Pierro, E., & Gorb, S. N. (2011). Origin of the superior adhesive performance of mushroom-shaped microstructured surfaces. Soft Matter, 7(12), 5545. https://doi.org/10.1039/c0sm01482f
Zhu, L. Y. (1999). Strength and stability of a meniscus in a slider-disk interface. IEEE Transactions On Magnetics, 35(5), 2415–2417. https://doi.org/10.1109/20.800843
Acknowledgements
The authors greatly appreciate the financial support of the National Natural Science Foundation of China [No. 51975586, 11972375], and the Shandong Provincial Natural Science Foundation [No. ZR2019QA010, ZR202011050038].
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 Video S1: Adhesion of a Si wafer, the side/top of a battery, a glass sheet with 1-mm-wide crack and a glass ball (underwater/dry) by the bio-inspired adhesive sucker (MP4 239746 KB)
Supplementary file2 Video S2: Gripping glass sheet by the mechanical claw with bio-inspired suckers (MP4 10061 KB)
Supplementary file3 Video S3: Grasping glass ball by the mechanical claw with bio-inspired suckers (MP4 17135 KB)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, J., Song, Z., Ma, C. et al. A Bioinspired Adhesive Sucker with Both Suction and Adhesion Mechanisms for Three-Dimensional Surfaces. J Bionic Eng 19, 1671–1683 (2022). https://doi.org/10.1007/s42235-022-00238-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-022-00238-5