
Abstract
A novel bionic piezoelectric actuator based on the walrus motion to achieve high performance on large working stroke for micro/nano positioning systems is first proposed in this study. The structure of the proposed walrus type piezoelectric actuator is described, and its motion principle is presented in details. An experimental system is set up to verify its feasibility and explore its working performances. Experimental results indicate that the proposed walrus type piezoelectric actuator could realize large working stroke with only one driving unit and one coupled clamping unit; the maximum stepping displacement is ΔLmax = 19.5 μm in the case that the frequency f = 1 Hz and the voltage U = 120 V; the maximum speed Vmax = 2275.2 μm · s−1 when the frequency f = 900 Hz and the voltage U = 120 V; the maximum vertical load mmax = 350 g while the voltage U = 120 V and the frequency f = 1 Hz. This study shows the feasibility of mimicking the bionic motion of the real walrus animal to the design of piezoelectric actuators, which is hopeful for the real application of micro/nano positioning systems to achieve large working stroke and high performance.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Positioning systems with micro/nano-scale accuracy is the key technology in the fields of ultra precision machining and measurement, optical engineering, intelligent robot, modern medical, aerospace and other high-end science and technology [1,2,3,4]. To achieve the accuracy in micro/nano scale, the application of modern precision driving technology puts forward higher requirements for the advanced actuators. Generally, traditional actuators (electrical motors, hydraulic cylinders, pneumatic cylinders, et al.) have large working stroke with high output force [5,6,7]; however, they always bring low positioning accuracy and large overall size, which could not meet the high requirements of compact positioning systems with micro/nano accuracy. Piezoelectric actuator is one of the novel actuators with the advantages of small size, high displacement resolution, large output load, high energy conversion rate, and it could achieve micro/nano level accuracy easily [8,9,10]. Up to now, it has been utilized in many positioning systems due to its unique merits.
According to the motion stroke, the piezoelectric actuator could be classified into two types: the direct-push type and the step type. The direct-push type actuator mainly utilizes the piezoelectric elements such as piezoelectric stack, piezoelectric wafer to directly push the mechanism to obtain small deformation. It has the advantages of simple structure and reliable system; however, its working stroke is small (generally several micrometers), which leads to limitation on the occasion of the motion with large working stroke [11,12,13,14,15]. The step type actuator could overcome the shortcoming of small working stroke by accumulating each step continuously, which is becoming a hot topic [16,17,18,19]. The step type actuator could be mainly sorted into ultrasonic type, inchworm type and friction-inertial type on the basis of different motion principles. Different type piezoelectric actuators have different merits and demerits on positioning accuracy or output force.
Among the developed piezoelectric actuators, the bionic actuators have gain more and more attentions from researchers all over the world since they could achieve good working performance by mimicking the motions of real creatures from nature [20]. The inchworm actuator is one of the famous bionic piezoelectric actuators, and it could obtain not only large output stroke but also high output accuracy and load capacity by mimicking the motion pattern of real inchworm in nature. It is seen that there is a small gap between the clamping unit and the base, and the motion principle is shown in Fig. 1a according to previous studies [21]. However, the inchworm actuator usually needs two sets of clamping units, one set of driving unit and a multi-channel control system, which leads to the problems of complex structure and control system [22]. This limits the practical application of inchworm actuators seriously.

Motion principles of tipical bionic piezoelectric actuators: a inchworm motion; b seal motion; c walrus motion
Another bionic piezoelectric actuator is called the seal type piezoelectric actuator, which is shown in Fig. 1b [23, 24]. Compared with the inchworm type piezoelectric actuator, two clamping units and one driving unit are still needed, but one clamping unit is changed into the continuous clamping unit which means that this clamping unit is kept to contact with the base (no gape) to supply a continuous friction force. Therefore, the control system is simplified since there is no need to input the voltage signal for the continuous clamping unit after the preload is adjusted properly. Nevertheless, two clamping units and one driving unit still make the whole structure complicated. In addition, how to find a suitable preload force for the continuous clamping unit is still a problem. It is seen that the mainly developed bionic piezoelectric actuators all have their limitations. The inchworm type piezoelectric actuator needs three units (two clamping units and one driving unit) and three input signals, which make the whole structure and control system complex. The seal type piezoelectric actuator is a little simple, but it still needs three units and two input signals. How to reduce the units and input signals to make the system simpler is still the hot topic for the real application of bionic piezoelectric actuators.
In this study, a novel walrus type piezoelectric actuator is first proposed to simplify the structure and the control system. Different with inchworm type and seal type piezoelectric actuators, only one clamping unit and one driving unit are needed for the proposed walrus type piezoelectric actuator. By mimicking the special motion of walrus, stepping motion with large working stroke is achieved. It is reported that the walrus mainly lives in the arctic region. There is much sea ice in that area, and walruses have developed a special “walking by tooth” motion to make them walk on the slippery ice surface, which means they utilize their large teeth to fix and drag their body to achieve the stepping motion. By mimicking this special motion, a novel walrus type piezoelectric actuator is first proposed in this study, and the working principle is illustrates in Fig. 1c. As is seen in Fig. 1c, the clamping unit works as the “teeth” of the walrus, and the proposed coupled driving unit is able to achieve the motion both in x and y directions which is treated as the body of the walrus. The comparison between the proposed actuator and other bionic type actuators is shown in Table 1. It is seen that the proposed walrus type piezoelectric is much simpler than other bionic piezoelectric actuators, which is meaningful for the further application. More details on the motion principle of the proposed walrus type piezoelectric actuator are illustrated in part 2. In this study, the structure and motion principle of the proposed walrus type piezoelectric actuator are described, theoretical and Finite element method (FEM) simulations are carried to calculate the step motion, and a test system is set up to verify its feasibility and explore its performances. This study is hopeful for the real application of micro/nano positioning systems to achieve large working stroke and high resolution at the same time.
2 Materials and Methods
2.1 Structure
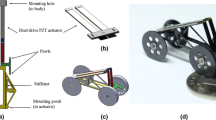
This study first proposes a novel walrus type piezoelectric actuator, and the structure is illustrated in Fig. 2. The walrus type piezoelectric actuator is made up by a clamping unit, a special coupled driving unit, screws, micrometer knobs, a slider, and a base. The clamping unit and the driving unit both include a flexure mechanism, a PZT stack, and a wedge block. The asymmetrical trapezoid flexure mechanism is utilized for the coupled driving unit to achieve the motion both in x and y directions, so as to push the slider to move [25]. In addition, the rectangle flexure mechanism is applied for the clamping unit to clamp or release the slider according to the control signal. Four micrometer knobs are utilized to adjust the preload force between the clamping or driving unit and the slider. Therefore, the preload force is adjusted by the four micrometer knobs with hands until the slider moves smoothly. Here, a commercial linear guider VR3-50 from THK Company is treated as the slider for its good motion accuracy. To assemble the two feet and the slider, the left and the right ends of the base are higher than the middle surface, and these two step surfaces are manufactured by the wire cutting (cutting in one time) to keep the coplanar accuracy. All of the clamping unit, the coupled driving unit, the slider and the micrometer knobs are assembled on the base by screws.

Structure of the proposed walrus type piezoelectric actuator
2.2 Structure Analysis
Flexure mechanisms are utilized in the design of the proposed walrus type piezoelectric actuator. For the clamping unit, the rectangle flexure mechanism is applied to assemble the PZT stack to obtain the function of clamping or releasing the slider which works as the “teeth” of the walrus. Here, the rectangle flexure mechanism is utilized since it is easy for the clamping unit to achieve the linear motion Ly in y direction in the case that the PZT stack works, as is seen in Fig. 3a. For the coupled clamping unit, the asymmetrical trapezoid flexure mechanism is utilized to achieve the motion both in x and y directions which works as the body of the walrus. The bottom angles of the proposed trapezoid flexure mechanism are 90° and 60°, respectively. It is seen in Fig. 3b that in the case that the PZT stack extends a distance of Ly in y direction, the contact point K moves to K’ which brings a coupled motion Lx in x direction due to this asymmetrical structure. Here, Ly is called the major motion which is utilized to clamp the slider. Lx is called the coupled motion to drive the slider to move in x direction since it is generated by the proposed asymmetrical trapezoid structure.

Structure of flexure mechanisms: a the clamping unit; b the coupled driving unit
To analyze the performance of the flexure mechanisms for the clamping unit and the coupled driving unit, FEM method is utilized to calculate the performance. As is shown in Fig. 4a, the displacement result in x direction of the static solid mechanics calculation is obtained in the case that the input displacement is 10 μm for both the clamping unit and the coupled driving unit. It is seen that since the rectangle flexure mechanism is utilized for the clamping unit, the contact point E only moves a distance Ly = 10 μm in y direction, which is suitable for the clamping unit to achieve the clamping or releasing motion to the slider. Differently, for the coupled driving unit, in the case that an input displacement of 10 μm is applied in y direction, the contact point K achieves two motions in both x direction and y direction. Here, Ly = 10 μm is the major motion caused by the input displacement of PZT stack, and Lx ≈ 15 μm is the coupled motion caused by the special asymmetrical trapezoid flexure mechanism which is utilized to drive the slider to move along x direction. Additionally, the dynamic modal analysis for the utilized flexure mechanisms is also carried out by FEM method. The first modal result is illustrated in Fig. 4b, and the resonant frequency of the first modal is f1 = 2672.4 Hz. It is seen that under the first resonant frequency, the major deformation is generated by the coupled driving unit with the asymmetrical trapezoid structure. The resonant frequencies of the first five modals are: f1 = 2672.4 Hz, f2 = 3563.2 Hz, f3 = 3579.9 Hz, f4 = 4603.4 Hz and f5 = 5985.2, which are much higher than the general working frequency of the proposed walrus type piezoelectric actuator. It is means that during the working process, it is difficult to generate the unwanted resonant phenomenon.

FEM calculation: a the static solid mechanics calculation; b the dynamic model calculation
2.3 Motion Principle
Figure 5 is the diagram of the motion principle of the proposed walrus type piezoelectric actuator. The coupled driving unit is driven by the square wave voltage signal U1, and the clamping unit is driven by the square wave signal voltage U2, as is shown in Fig. 5. The square wave voltage signal is utilized since it is simple and easy to achieve high frequency. The whole motion process is divided into four steps: (1) at the initial status t = 0 s, the driving unit and the clamping unit are not loaded with the voltage signals; (2) the driving voltage U1 changes from a to b, the driving unit extends to push the slider moving along axis x by the friction force f1 generated by the coupled motion; the function of the driving unit works as the “body” of the walrus to move the teeth forward; (3) the voltage signal U2 for the clamping unit varies from e to f at the same time to clamp the slider which works as the “teeth” of the walrus to fix and drag the “body”; at the same time, the voltage signal U1 for the driving unit changes from c to d, and the driving unit retreats back; (4) the driving voltage U2 changes from g to h, the clamping unit retreats to the initial status, and a working cycle of the actuator is finished; the slider moves a small distance ΔL in x direction. Repeating the stage (1) to stage (4), a continuous linear stepping motion could be achieved. By mimicking the special motion of real walruses, only two flexure mechanisms are applied to complete the driving and clamping actions instead of using traditional complex structure with three channels.

Motion principle of the proposed walrus type piezoelectric actuator
3 Results and Discussion
3.1 Experimental System
To verify the feasibility of the proposed walrus piezoelectric actuator and explore its performances, an experimental system is set up as is illustrated in Fig. 6. The test system is composed of a PC, a laser sensor, a prototype, a voltage amplifier and a signal generator. The signal generator which is from Agilent Ltd. 33522A is used to generate driving (input) voltage signals for both the clamping unit and driving unit. The driving (input) voltage signals are in the square wave form which is shown in Fig. 5. The voltage amplifier 9400 from Tabor Electronics Ltd. is used to amplify the driving (input) voltages. And then the amplified voltages are loaded to the PZT stacks which are assembled in the clamping and driving units. The PZT stack is AE0505D16 with a size of 5 mm × 5 mm × 20 mm from NEC Company. The laser sensor which is from Keyence Ltd. LK-H080 is applied to detect the motion displacement of the slider and transmit the displacement signal to the PC. The PC is utilized to receive, process, display and save all the data obtained from the experiments.

Experimental system for the proposed walrus type piezoelectric actuator
3.2 Performances and Discussion
Figure 7 shows the change of the motion displacement L along with the time in the case that the input voltage increases from U = 20 V to U = 120 V and the input frequency keeps around f = 1 Hz. It is seen that the stable stepping motion is easily achieved by proposed walrus type piezoelectric actuator. The motion displacement L achieves the growth step by step with time t. In the case that the input voltage signal increases, the displacement L is getting larger and larger which is caused by the fact that the extending displacement of the PZT stack is larger with higher input voltage. The experiment in Fig. 7 indicates that the proposed walrus type piezoelectric actuator could realize stable stepping motion to achieve large working stroke with good performance.

The performance of motion displacement L under different input voltages
Figure 8 illustrate the results that the relationship between the stepping displacement ΔL and the input voltage U under the condition of the input frequency f = 1 Hz. When the input voltage grows from U = 20 V to U = 120 V, the stepping displacement ΔL is increasing gradually. A great linear relationship is found between the stepping displacement ΔL and the input voltage U which could be described as be written as ΔL = 0.1619U + 0.2377 with a fitting coefficient of R2 = 0.9928. Additionally, the maximum stepping displacement ΔL is achieved as ΔL = 19.5 μm under the condition of U = 120 V and f = 1 Hz. The piezoelectric actuator works unstably in the case that U < 220 V or U > 120 V. In the case that the input voltage is smaller than 20 V, the proposed piezoelectric actuator is not able to move stably, and the minimum stepping displacement is ΔL = 3.14 μm. Therefore, the performance of the stepping displacement indicates that the proposed walrus type piezoelectric actuator could achieve stable stepping motion and the stepping motion performance is excellent.

The stepping displacement ΔL changes with the input voltage U
The frequency f of input voltages is also one of the significant parameters that influence the working performance of piezoelectric actuators. Figure 9 is the relationship between the stepping displacement ΔL and the input frequency f under the condition of U = 120 V. It is seen that in the case of f = 1 Hz, the stepping displacement is around ΔL = 19.5 μm. In the case that f increases from 1 Hz to 30 Hz, the stepping displacement ΔL falls down from ΔL = 19.5 μm to ΔL = 5.97 μm. Then, the stepping displacement ΔL increases to 14.34 μm while the frequency f goes up to 40 Hz. After that, the stepping displacement ΔL falls to 4.92 μm rapidly while f is 50 Hz. Under the condition of input frequency f goes up from 50 Hz to 1500 Hz, the stepping displacement ΔL varies under 4.92 μm. The stepping displacement ΔL falls to 0 while f is larger than 1500 Hz. The frequency performance results indicate that the working frequency range of the proposed walrus piezoelectric actuator is from f = 0 Hz to f = 1500 Hz, and the maximum stepping displacement is ΔL = 19.5 μm under the condition of f = 1 Hz and U = 120 V.

The performance under different input frequency
Another important performance parameter is the motion speed of a piezoelectric actuator which is also investigated in this study. The motion speed is obtained by the stepping displacement multiplying the frequency, as is shown in Eq. (1):
where V is the motion speed.
Figure 10 shows the relationship between the speed V and the input frequency f under the condition of U = 120 V. It is seen that the speed V varies around V = 500 μm · s−1 when f increasing from 1 to 600 Hz. Then, the speed V increases from V = 576 μm · s−1 to V = 2275.2 μm · s−1 rapidly while the input frequency rising from f = 600 Hz to f = 900 Hz. In the case that f is larger than 900 Hz, the speed V falls from V = 2275.2 μm · s−1 to 0 while f increases from f = 1000 Hz to f = 1500 Hz. The speed shows a sharp decreasing after f > 900 Hz, and this is thought to be caused that the frequency is too high for the PZT stacks and flexure mechanisms to elongate to the full length. The proposed walrus piezoelectric actuator works unstably in the case that f > 1500 Hz. Thus, the maximum motion speed of the proposed walrus piezoelectric actuator is Vmax = 2275.2 μm · s−1 under the condition of f = 900 Hz and U = 120 V. The oscillation of the speed is observed, which may be caused by the mechanical vibration and resonant phenomena of the flexure mechanism and the whole structure. Besides, the speed is obtained by the product of stepping displacement ΔL and frequency f, so the change of ΔL will also influence the speed performance.

The speed V under different input frequency f
To investigate the load performance of the proposed walrus type piezoelectric actuator, the standard weight method is utilized. The designed actuator is generally utilized to move a platform. Hence, in this study, the output force is mainly measured by adding the standard weight on the upper surface of the slider to mimic the real working condition. Figure 11 illustrates the relationship between the stepping displacement ΔL and vertical load m under the condition of U = 120 V and f = 1 Hz. The standard weight is used and positioned vertically to the orientation of the slider moving as is shown in Fig. 11. It is seen that the stepping displacement ΔL decreases from ΔL = 19.5 μm to ΔL = 0.1 μm with the vertical load m adding from m = 0 g to m = 350 g. The relationship between the stepping displacement ΔL and vertical load m could be described as ΔL = − 0.0543 m + 15.649, and the fitting coefficient is R2 = 0.8827. The actuator works unstably under the condition of the vertical load m > 350 g, which means the maximum vertical load mmax = 350 g (around 3.43 N) under the condition of U = 120 V and f = 1 Hz.

Load performance of the proposed walrus type piezoelectric actuator
4 Conclusion
This study first proposes a walrus type bionic piezoelectric actuator with only one coupled driving unit and one clamping unit. The structure and working process are simpler than the traditional bionic type piezoelectric actuators. The structure and the motion principle of the proposed walrus type piezoelectric actuator are presented and analyzed in details. The experimental system is set up to verify its feasibility and investigate the working performances of the proposed bionic type piezoelectric actuator. Results show that the proposed walrus type piezoelectric actuator could realize large working stroke with stepping motion by mimicking the special motion of the real walrus in nature; the maximum stepping displacement is ΔLmax = 19.5 μm with the frequency f = 1 Hz and input voltage U = 120 V; the maximum motion speed is Vmax = 2275.2 μm · s−1 while f = 900 Hz and U = 120 V; the maximum vertical load mmax = 350 g under the condition of f = 1 Hz and U = 120 V. This study provides a meaningful design method to simplify the structure and control of bionic piezoelectric actuators, and it is verified that the bionic idea could be utilized to the design of piezoelectric actuator which could have a bright future.
References
Liaw, H. C., & Shirinzadeh, B. (2011). Robust adaptive constrained motion tracking control of piezo-actuated flexure-based mechanisms for micro/nano manipulation. IEEE Transactions on Industrial Electronics, 58, 1406–1415.
Zareinejad, M., Rezaei, S. M., & Abdullah, A. (2009). Development of a piezo-actuated micro-teleoperation system for cell manipulation. International Journal of Medical Robotics and Computer, 5, 66–76.
Chopra, S., & Gravish, N. (2019). Piezoelectric actuators with on-board sensing for micro-robotic applications. Smart Materials and Structures, 8, 115036.
Wang, L., Shu, C. Y., & Jin, J. M. (2017). A novel traveling wave piezoelectric actuated tracked mobile robot utilizing friction effect. Smart Materials and Structures, 26, 035003.
Boduroglu, A., Gulec, M., Demir, Y., Yolacan, E., & Aydin, M. (2019). A new asymmetric planar v-shaped magnet arrangement for a linear pm synchronous motor. IEEE Transactions on Magnetics, 55, 1–5.
Lai, W. B., Li, D. T., & Xie, Y. H. (2020). Simulation and experimental study of hydraulic cylinder in oscillating float-type wave energy converter. Polish Maritime Research, 27, 30–38.
Zhao, L., Gu, S. M., Zhang, J. H., & Li, S. H. (2021). Finite-time trajectory tracking control for rodless pneumatic cylinder systems with disturbances. IEEE Transactions on Industrial Electronics, 99, 1.
Xu, D. M., Liu, Y. X., Shi, S. J., Liu, J. K., Chen, W. S., & Wang, L. (2018). Development of a nonresonant piezoelectric motor with nanometer resolution driving ability. IEEE/ASME Transactions on Mechatronics, 23, 444–451.
Zhu, W. L., Zhu, Z. W., Guo, P., & Ju, B. F. (2018). A novel hybrid actuation mechanism based xy nanopositioning stage with totally decoupled kinematics. Mechanical Systems and Signal Processing, 99, 747–759.
Fleming, A. J. (2013). A review of nanometer resolution position sensors: Operation and performance. Sensors and Actuators A: Physical, 190, 106–126.
Li, J. P., Liu, H., & Zhao, H. W. (2017). A compact 2-dof piezoelectric-driven platform based on “z-shaped” flexure hinges. Micromachines, 8, 245.
Lee, G., You, K., Kang, T., Yoon, K. J., Lee, J. O., & Park, J. K. (2010). Modeling and design of h-infinity controller for piezoelectric actuator lipca. Journal of Bionic Engineering, 7, 168–174.
Tian, Y., Shirinzadeh, B., & Zhang, D. (2010). Design and dynamics of a 3-dof flexure-based parallel mechanism for micro/nano manipulation. Microelectronic Engineering, 87, 230–241.
Mehrabi, H., Hamedi, M., & Aminzahed, I. (2020). A novel design and fabrication of a micro-gripper for manipulation of micro-scale parts actuated by a bending piezoelectric. Microsystem Technologies, 26, 1563–1571.
Lin, R., Li, Y. Z., Zhang, Y. X., Wang, T. W., Wang, Z. Y., Song, Z. H., Dou, Z. P., & Qian, J. Q. (2019). Design of a flexure-based mixed-kinematic xy high-precision positioning platform with large range. Mechanism and Machine Theory, 142, 103609.
Li, J. P., Huang, H., & Morita, T. (2019). stepping piezoelectric actuators with large working stroke for nano-positioning systems: A review. Sensors and Actuators A Physical, 292, 39–51.
Wang, R. M., Hu, Y. L., Shen, D. Z., Ma, J. J., Li, J. P., & Wen, J. M. (2020). A Novel Piezoelectric inchworm actuator driven by one channel direct current signal. IEEE Transactions on Industrial Electronics, 68, 2015–2023.
Shen, D. Z., Wen, J. M., Ma, J. J., Hu, Y. L., Wan, R. M., & Li, J. P. (2019). A novel linear inertial piezoelectric actuator based on asymmetric clamping materials. Sensors and Actuators A Physical, 303, 111746.
Zhang, Y. K., Peng, Y. X., Sun, Z. X., & Yu, H. Y. (2018). A novel stick–slip piezoelectric actuator based on a triangular compliant driving mechanism. IEEE Transactions on Industrial Electronics, 66, 5374–5382.
Wang, S. P., Rong, W. B., Wang, L. F., Pei, Z. C., & Sun, L. N. (2017). Design, Analysis and experimental performance of a bionic piezoelectric rotary actuator. Journal of Bionic Engineering, 14, 348–355.
Li, J. P., Zhao, H. W., Qu, H., Cui, T., Fu, L., Huang, H., Ren, L. Q., & Fan, Z. Q. (2013). A piezoelectric-driven rotary actuator by means of inchworm motion. Sensors and Actuators A: Physical, 194, 269–276.
Dong, H. J., Li, T. J., Wang, Z. W., & Ning, Y. M. (2020). Design and experiment of a piezoelectric actuator based on inchworm working principle. Sensors and Actuators A: Physical, 306, 111950.
Furutani, K., & Kawagoe, K. (2010). Influence of slope angle and traction load on performance of azarashi (seal) mechanism with one degree of freedom. IEEJ Transactions on Electrical and Electronic Engineering, 5, 181–187.
Furutani, K., Ohta, N., & Furuta, A. (2008). Improvement of resolution of AZARASHI (seal mechanism by current pulse drive. Journal of the Japan Society for Precision Engineering, 74, 411–415.
Li, J. P., Cai, J. J., Wen, J. M., Zhang, Y., & Wan, N. (2020). A parasitic type piezoelectric actuator with the asymmetrical trapezoid flexure mechanism. Sensors and Actuators A: Physical, 309, 111907.
Acknowledgements
This work was supported by the Natural Science Foundation of Zhejiang Province: LY19E050010, LY20E050009, LGF20E050001; General Research Projects of Zhejiang Provincial Department of Education: Y201943038; 2020-Y1-A-028, Hangzhou Innovation Institute, Beihang University.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, J., Cai, J., Wan, N. et al. A Novel Bionic Piezoelectric Actuator Based on the Walrus Motion. J Bionic Eng 18, 1117–1125 (2021). https://doi.org/10.1007/s42235-021-00081-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-021-00081-0