
Abstract
Multi-armed restless bandit tasks are regularly applied in psychology and cognitive neuroscience to assess exploration and exploitation behavior in structured environments. These models are also readily applied to examine effects of (virtual) brain lesions on performance, and to infer neurocomputational mechanisms using neuroimaging or pharmacological approaches. However, to infer individual, psychologically meaningful parameters from such data, computational cognitive modeling is typically applied. Recent studies indicate that softmax (SM) decision rule models that include a representation of environmental dynamics (e.g. the Kalman Filter) and additional parameters for modeling exploration and perseveration (Kalman SMEP) fit human bandit task data better than competing models. Parameter and model recovery are two central requirements for computational models: parameter recovery refers to the ability to recover true data-generating parameters; model recovery refers to the ability to correctly identify the true data generating model using model comparison techniques. Here we comprehensively examined parameter and model recovery of the Kalman SMEP model as well as nested model versions, i.e. models without the additional parameters, using simulation and Bayesian inference. Parameter recovery improved with increasing trial numbers, from around .8 for 100 trials to around .93 for 300 trials. Model recovery analyses likewise confirmed acceptable recovery of the Kalman SMEP model. Model recovery was lower for nested Kalman filter models as well as delta rule models with fixed learning rates. Exploratory analyses examined associations of model parameters with model-agnostic performance metrics. Random exploration, captured by the inverse softmax temperature, was associated with lower accuracy and more switches. For the exploration bonus parameter modeling directed exploration, we confirmed an inverse- U-shaped association with accuracy, such that both an excess and a lack of directed exploration reduced accuracy. Taken together, these analyses underline that the Kalman SMEP model fulfills two basic requirements of a cognitive model.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The exploration–exploitation trade-off is the decision between a familiar option with a known reward value and an unfamiliar option with an unknown or uncertain reward value (Addicott et al., 2017). Humans face the exploration–exploitation trade-off in the context of consumer and career decisions, in decisions about how and with whom to spend their social lives, voting decisions, just to name a few examples. An individuals’ decision strategy might constitute a combination of explorative and exploitative choices or choices which vary along a continuum between exploration and exploitation (Addicott et al., 2017; Mehlhorn et al., 2015). Striking some balance between exploration and exploitation is often considered to be beneficial. Predominantly exploitative decision strategies might be disadvantageous since they might lead to inflexible, rigid and/or habitual behavior, in particular in volatile environments. An excess of exploration, on the other hand, results in inefficient switching at the expense of reward accumulation, and a lack of expertise (Addicott et al., 2017). At least two main exploration strategies have been discussed: random and directed exploration (Wilson et al., 2021). While random exploration entails randomly choosing unknown options, in directed exploration, the choices are (strategically) biased towards options that maximize information gain (reduce uncertainty). Random exploration has low computational costs but does not lead to optimal performance. Directed exploration is a more elaborate strategy involving more computational costs and leading to better performance (Meder et al., 2021; Wilson et al., 2014). Another phenomenon occurring in explore-or-exploit situations is perseveration, i.e., reward-independent choice repetition (Chakroun, 2019; Payzan-Lenestour & Bossaerts, 2012). Gershman (2020) proposes that perseveration occurs due to the trade-off between maximizing the reward and minimizing the complexity of the choice process.
To quantify behavior in the exploration–exploitation trade-off, structured environments must be created. These environments need to be structured with respect to the agent’s goal, the space of options, and the temporal dimension to ensure correct interpretations of results (Mehlhorn et al., 2015). There are several tasks providing a structured environment and enabling quantitative research on the exploration–exploitation trade-off. Among these tasks are the observe or bet task (Blanchard & Gershman, 2018; Tversky & Edwards, 1966), the patch foraging task (Constantino & Daw, 2015), the clock task (Badre et al., 2012), and multiple variants of the bandit task (Daw et al., 2006), a widely used testing bed for reinforcement learning algorithms modeled after simple slot machines with multiple arms yielding probabilistic rewards (Sutton & Barto, 1998). Bandit tasks offer a realistic and widely applicable operationalization of the exploration–exploitation trade-off, for situations in which the properties of the environment are independent of the agent’s behavior. One task version widely used in cognitive neuroscience is the four-armed restless bandit task (Daw et al., 2006). Here, on each trial, participants select between four different colored options (“bandits”). Following selection, the number of points earned is drawn from a Gaussian distribution centered at the chosen bandit’s mean. Mean payouts of each bandit are determined by independent decaying Gaussian random walk processes.
Various models have been proposed for reinforcement learning (RL) problems such as multi-armed bandit tasks. These models generally consist of a learning rule and decision rule. The Delta rule is a model-free learning rule based on the Rescorla Wagner model (Rescorla & Wagner, 1972). Here, the chosen bandit is updated via the reward prediction error (RPE), i.e., the difference between the expected and the obtained reward, weighted by a fixed learning rate parameter (Sutton et al., 2018). Learning rates can be the same for positive and negative RPEs or differ for positive vs. negative RPEs. In what follows, the latter case is referred to as Diff Delta rule (Cazé & van der Meer, 2013). In contrast, the Kalman Filter model, also called a Bayesian Learner, is a model-based RL algorithm. In addition to tracking each bandit’s expected mean value, Kalman Filter models track the uncertainty of the expectations, and use trial-wise uncertainty-dependent learning rates. Hence the restless bandit task, the rewards change following a decaying Gaussian random walk, these decaying Gaussian random walks are implemented into the Kalman Filter models as model of the environment: expected values of unchosen options decay asymptotically towards the mean. (Chakroun et al., 2020; Daw et al., 2006; Sutton et al., 2018). Among the decision rules discussed here are the ε-greedy choice rule, and various softmax rules. The ε-greedy rule is a heuristic strategy where the agent chooses a random action in a fixed proportion of trials and chooses greedily the highest expected value (exploitation) on all other trials. The softmax decision rule (SM) also implements a form of random sampling such that options with greater expected values are chosen with higher probability. The degree to which a decision depends on option values is formalized with the softmax temperature parameter \(\beta\) (Daw et al., 2006). While values of \(\beta\) near 0 increase random exploration (for \(\beta =0,\) choices are random), higher values of \(\beta\) correspond to increased exploitation. Additional terms can be included in the SM rule to capture relevant choice characteristics. An additional exploration bonus parameter \(\varphi\) can be implemented to grant an exploration bonus to highly uncertain and thus informative options. Higher values of \(\varphi\) correspond to increases in directed exploration (Chakroun et al., 2020; Speekenbrink & Konstantinidis, 2015). A perseveration parameter \(\rho\) which modulates the value of the previously chosen option can likewise be included. In principle, different learning rules can be combined with different decision rules, even though the implementation of the decision rule parameters might differ if used with different learning rules (Speekenbrink & Konstantinidis, 2015). Equations for the Delta rule, the Diff Delta rule, and the Kalman Filter, as well as the various versions of the SM decision rule are presented in more detail in the Methods section.
Behavioral measures in the bandit task, which do not require computational modeling (“model-agnostic” measures) include the total payout, the percentage of trials in which participants chose the best bandit (“accuracy”), and the mean rank of the chosen bandit. These measures are different indicators of performance and should increase as the balance between exploration and exploitation becomes more optimal. The percentage of trials in which the participants switch from one bandit to another, on the other hand, indexes both random and directed exploration (Chakroun et al., 2020).
Models that are capable of decomposing human choice behavior into meaningful latent components such as exploration or perseveration depict valuable tools for researchers and clinicians. They help to understand how humans solve such tasks and give insights into potential alterations in key characteristics of choice behavior in clinical populations (Wiehler et al., 2021). Several studies used model comparison to examine reinforcement learning models in human bandit task performance: Daw et al. (2006) compared three Kalman Filter models with \(\varepsilon\)-greedy, SM and SME decision rules. They found no evidence that a model with exploration bonus accounts better for their data. In their study the Kalman SM model outperformed the others. In line with this, Speekenbrink and Konstantinidis (2015) found the SM decision rule to outperform the SME and \(\varepsilon\)-greedy decision rules. With respect to learning rules, they found mixed evidence: depending on the model comparison metric, the best model used either the Kalman Filter or the Delta rule. More recently, Chakroun et al. (2020) compared all combinations of the Kalman Filter and the Delta rule with the SM, SME, and SMEP choice rules in human bandit task data. The Kalman SMEP model accounted best for their data. We recently replicated this model comparison in a group of problem gambling participants and a group of healthy matched controls (Wiehler et al., 2021). Raja Beharelle et al. (2015) found that the Kalman SME model accounted better than the Kalman SM model for a modified three-armed bandit task, which aims at preventing perseveration behavior. In other modified bandit tasks, the Kalman Filter outperformed the Delta rule (Payzan-Lenestour & Bossaerts, 2012) and modeling of uncertainty-based exploration improved the fit of these models (Cogliati Dezza et al., 2017; Wilson et al., 2014). Taken together, those attempts which try to prevent or control perseveration behavior succeed in disentangling directed and random exploration.
Aim of the Study
Even though the Kalman SMEP model was found to account best for bandit task data (Chakroun et al., 2020; Wiehler et al., 2021) parameter and model recovery work has been somewhat neglected, both by us and by others. Wilson and Collins (2019) suggest several steps researchers should follow to ensure the reliability and interpretability of computational modeling studies. Two key aspects researchers should address are model recovery and parameter recovery analysis before data collection begins. Here we use simulations to examine parameter and model recovery of the Kalman SMEP model as well as several other candidate models for human bandit task data.
If the ground truth (i.e., the parameters that have produced the data) is known, it should be possible to recover these parameters using parameter estimation. This property of a model is referred to as parameter recovery. Non-deterministic models do not recover the true underlying parameters perfectly. Therefore, one aim in computational modeling is to ensure that parameter recovery is good enough for the parameters to be meaningful (Wilson & Collins, 2019). Parameter recovery is typically performed using simulated data where the true parameter values are known. Following model estimation, the true parameter values are compared to the recovered (fitted) parameter values. There is no general standard for parameter recovery and no commonly applied cut-off value, since the desired accuracy depends on the type of model and the field of research. Parameter recovery can be graphically examined as the scatter plot of the true vs. recovered parameter values to examine the degree to which they are correlated, and whether there is a bias. Additionally, ranges of the true parameter values in which parameter recovery is better or worse can be identified. Validity of parameter estimation is dependent on the model’s architecture and the estimation method applied. In suboptimal scenarios this can lead to interdependencies in the fitted parameters. This can be examined by plotting the posterior means and broadness of the posteriors’ highest density intervals (HDI) of the different parameters against each other (Wilson & Collins, 2019).
We also examined how parameter recovery relates to the number of data points (trials): one consideration when administering a survey or test to participants is whether performance is affected by fatigue (VandenBos, 2015). Mental fatigue can reduce behavioral flexibility and increase perseveration (van der Linden et al., 2003). Thus, mental fatigue might constitute a confounding variable in studies applying the bandit task, and hence, there should not be more trials than necessary. However, too few trials might reduce the ability to estimate the true underlying parameter values. Examining parameter recovery for different numbers of trials can therefore guide researchers to find the optimal number of trials to use in their experiments.
In a second step, we examined how model-agnostic performance metrics relate to the data-generating parameter values. This can be helpful when evaluating psychological interpretations of model parameters. Following the conception of the exploration–exploitation trade-off (Addicott et al., 2017), both an excess of exploration as well as an excess of exploitations should negatively impact performance metrics, i.e., decreased overall payoff, lower mean rank of the chosen bandit and lower percentage of trials in which the best bandit was chosen. Random and directed exploration (softmax temperature, exploration bonus) should lead to more switches. Random exploration and perseveration are constraints to the rational solution of the exploration–exploitation trade-off (Gershman, 2020). They are therefore expected to be associated with lower performance. The exact forms of these associations are explored here.
Model recovery is given when in a set of possible models, the model underlying the data-generating process can be successfully identified using model comparison techniques. This can be examined by simulating data based on a set of different candidate models. Each simulated data set is then again fitted using the same set of candidate models. Successful model recovery then entails that the true underlying model accounts for the data better than alternative models. Crucially, model recovery is conditional on the models compared to the model of interest such that a consideration of additional models in the model recovery analysis might yield different results. Therefore, analyses of model recovery should take a range of different models into account (Wilson & Collins, 2019). Model recovery also depends on the range of input parameters used in the simulations. It is possible that model comparison can successfully distinguish models in one range of input parameters, but not in another part of the parameter space. Omitting model recovery checks can lead to misinterpretations of model comparisons and might lead to the selection of models with poor generative and predictive performance (Palminteri et al., 2017). If model recovery fails in studies of simulated data, model comparisons of models fit to empirical data are suspect, such that inferences regarding latent processes underlying cognitive functions are not interpretable. Here we analyze model recovery of Kalman Filter and Delta rule models, using a range of different variants of the softmax choice rule.
Methods
Material
The simulations and the analyses were conducted using the software R, version 4.0. (R Core Team, 2021) and Stan, version 2.21.2 (Stan Development Team, 2021). Stan is a free and open-source program that performs Bayesian inference or optimization for arbitrary user-specified models (Gelman et al., 2015). Model comparison was conducted using the R package loo (Vehtari et al., 2020). For the presentation of results, the R packages corx (Conigrave, 2020) and papaja (Aust & Barth, 2020) were used. Materials and models as well as analysis code are accessible on the website of the Open Science Foundation: https://osf.io/2e69y/.
Underlying Payoff Structure
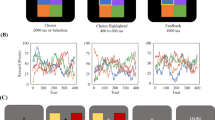
As input to the simulations of behavior in the four-armed bandit task, for each of the options, a decaying random walk was implemented, based on the procedure described in Daw et al. (2006). This process is specified by Eqs. (1) and (2):
Here, the reward obtained from bandit \(i\) on trial \(({\mu }_{i, t}^{post}\)) is sampled from a normal distribution with the previous reward \({\mu }_{i, t}^{pre}\) as the mean and standard deviation \({\sigma }_{o}\). The decay of the random walk is specified in formula (2). Here, \(\lambda\) is the decay parameter, \(\vartheta\) the center of the decay, \(\nu\) the diffusion noise and \({\sigma }_{D}\) the standard deviation of the diffusion noise. The following values were used as input parameters: \(\lambda\) = 0.9836, \(\vartheta\) = 50,\({\sigma }_{o}\) = 4 and \({\sigma }_{D}\) = 2.8 (Daw et al., 2006). We used two different instantiations of this random walk structure (Fig. 1). Analyses used the instantiation in Fig. 1A, which included 300 trials. For investigating the effect of the number of trials on parameter recovery, we used the instantiation depicted in Fig. 1B, which included 500 trials.

Gaussian random walks used for simulations. A: instantiation of the decaying random walk that was used in the general analysis of parameter and model recovery; B: instantiation of the random walk used to compare the parameter recovery of models with different numbers of trials. Lines reflect mean payoffs per option (bandit)
Computational Models
To verify for model recovery, models must be compared to a set of competing candidate models (Wilson & Collins, 2019). Here, the Kalman SM, Kalman SME, Delta SM and Diff Delta SM model were compared. We decided for this set of models to be able to compare between different learning rules, as well as between different decision rules when applying the same learning rule. The Delta SME and Delta SMEP model, as well as the corresponding Diff Delta models were not examined hence the implementation of directed exploration in these models, as they were used by Daw et al. (2006) and Chakroun et al. (2020) differs strongly from the implementation of directed exploration in Kalman filter models and was not supported empirically. The Kalman SMEP model accounts for model-based RL and decision processes. It consists of a learning rule, a decision rule, and a decay rule. The learning rule specifies the updating of for the mean and variance of the expected reward based on the prediction error and an uncertainty-dependent trial-wise learning rate (Kalman gain). It is depicted in formula (3) to (5).
The Kalman Filter assumes that agents model a distribution for each option which assorts a credibility to each possible reward, where the mean of this distribution resembles the value of reward which appears most credible to the agent. The variance of this distribution resembles the uncertainty of this expectation. In formula (3), \({\widehat{\mu }}_{{c}_{t},t}\) is the mean expected value of the chosen option i \(={c}_{t}\) on a trial \(t\), which is updated on each trial based on the prediction error \({\delta }_{t}\) and the Kalman gain \({\rm K}_{t}\). Importantly, as it is formalized in (4), not only the expected value of the chosen option is updated, but also the uncertainty of that option, i.e., the expected variance of the expected value \({\widehat{\sigma }}_{{c}_{t},t}^{2}\). Kalman gain depends on the variance of the chosen option and the observation variance \({\sigma }_{o}^{2}\), as it is shown in Eq. (5). Intuitively, learning increases (\({\rm K}_{t}\) increases) with increasing option uncertainty.
The decision rule is outlined in Eq. (6):
The agent chooses option \(i\) on trial \(t\) with the probability \({P}_{i,t}\). This probability is calculated via softmax function with the free parameters: \(\beta\), \(\varphi\) and \(\rho\). \(\beta\) is the softmax temperature and is bounded to take only positive values (Daw et al., 2006), \(\varphi\) and \(\rho\) model the exploration bonus and perseveration bonus, respectively, which are implemented as additive components to the mean expected value of each option. The parameter ranges of \(\varphi\) and \(\rho\) are theoretically unrestricted. The exploration bonus is calculated as the product of \(\varphi\) and the standard deviation \({\widehat{\sigma }}_{i,t}^{pre}\) of each option \(i\) on trial \(t\). The perseveration bonus is calculated as the product of \(\rho\) and an indicator function \(I\) that equals 1 for the option that was chosen in the previous trial and 0 for all other options. The denominator of the softmax function contains the sum over all option values.
In terms of exploration/exploitation behavior, \(\beta\) reflects the degree to which an agent uses random exploration. Small values of \(\beta\) reflect increased random exploration, whereas high values of \(\beta\) reflect a greedy strategy, in which the option with the highest expected value plus additive components is chosen deterministically. Thus, \(\beta\) reflects the trade-off between random exploration and exploitation. The range of \(\beta\) was additionally restricted on the upper bound to a maximum value of \({\beta }_{max}=3\). This was done to enhance the performance of the model during the sampling process. Empirically, ranges between 0.18 and 0.26 of \(\beta\) were observed in human data (Chakroun et al., 2020). Thus, this restriction does not constrain the interpretability of the modeling results. \(\varphi\) reflects the degree of uncertainty-based exploration an agent uses: higher values of \(\varphi\) reflect higher levels of directed, uncertainty-based exploration, smaller values of \(\varphi\) reflect reduced uncertainty-based exploration. Negative values of \(\varphi\) reflect a strategy that gives an extra bonus to more certain options (Daw et al., 2006). \(\rho\) reflects choice “stickiness”, i.e., how much an agent tends to choose the same option as on the previous trial. High levels of \(\rho\) reflect a strategy strongly based on perseveration, values near zero reflect a strategy independent of the last trial and negative values reflect a value independent switching bonus (Chakroun, 2019).
The Kalman Filter SMEP model contains decay rules for the updating of the expected values and variances of all options between trials, specified in formula (7) and (8):
Here, the decay of the expected value depends on\(\lambda\), which reflects the size of the steepness of the decay, while \(\vartheta\) reflects the decay center, i.e., the value towards which the expected values decay asymptotically. Similarly, the decay of the expected variance of all options depends on \(\lambda\) and \({\sigma }_{D}\) (Daw et al., 2006). The form of these decay functions implements that older information on the value of an option loses its validity, and the agent uses rather information about the general size of rewards of all options than rely on old information about a specific option. Uncertainty increases if there is no new information but reaches an asymptotical ceiling. In all analyses conducted on Kalman Filter models in this study, the parameters ,\(\vartheta\),\({\sigma }_{o}\) and \({\sigma }_{D}\) were fixed to the true values underlying the payoff structure of the simulations. Specifically, \(\lambda\) = 0.9836, \(\vartheta\) = 50,\({\sigma }_{o}\) = 4 and \({\sigma }_{D}\) = 2.8, following the implementation of Daw et al. (2006) and Chakroun et al. (2020). Similarly, the initial values \({\mu }_{j,1}\) and\({\sigma }_{j,1}\), were fixed to their true values: \({\mu }_{j,1}\) was set to 50 and \({\sigma }_{j,1}\) was set to 4.
The Kalman SME and the Kalman SM Model rely on the same learning and decay rules as the Kalman SMEP model (see Eqs. 3–8). The decision rule of the Kalman SME model resembles the Kalman SMEP model without the perseveration term. It contains the free parameters \(\beta\) and \(\varphi\). Its decision rule is specified in formula (9).
The Kalman SM Model, accordingly, resembles the Kalman SMEP model without exploration bonus and perseveration. Its only free parameter is the softmax parameter \(\beta\). Its decision rule is specified in Eq. (10).
The Delta rule is a model-free learning rule, in which learning depends on the learning rate \(\alpha\). Each subject has a fixed learning rate that can take values between zero and one.
Here, \({\mathrm v}_{{\mathrm c}_{\mathrm t},\mathrm t}\) is the estimated value of the chosen arm \(c\) on a trial \(t\), \(\alpha\) the learning rate, \(\delta\) the prediction error and \({r}_{t}\) the obtained reward. The values of unchosen options are not updated (Sutton & Barto, 1998). The expected values are updated with the learning rate \(\alpha\), independent of whether the prediction error is positive or negative. Initial option values \({v}_{j,1}\) were set to 50 for all options. Based on the learned expectations the agent chooses an option following the softmax decision rule.
Finally, the Diff Delta rule corresponds to the Delta rule, but allows for asymmetric updating when prediction errors are positive versus when prediction errors are negative (Cazé & van der Meer, 2013). Its learning rule is described in formula (13).
Learning rates \({\alpha }^{+}\) and \({\alpha }^{-}\) are used, depending on the sign of the prediction error. This differentiation takes into account, that humans perceive positive and negative values as distorted subjective utilities, and this distortion depends on whether the values are positive or negative (Cazé & van der Meer, 2013). The decision rule of the Diff Delta SM model is the same for the Delta SM model, see Eqs. 13. The expectations about unchosen options are, as in the Delta SM model, not updated. The Diff Delta SM model then contains three free parameters, \({\alpha }^{+}\), \({\alpha }^{-}\), and \(\beta\), and one fixed parameter \({v}_{j,1}\), which was set to 50. An overview of the set of models and their free parameters is provided in Table 1.
General Procedure of Simulation and Fitting
The process of simulation included, in each analysis, the specification of the used model, setting a range of input parameters, the specification of the underlying payoff structure and the definition of the numbers of trials and subjects to be simulated. For model estimation, the simulated data (choices, rewards) for each simulated subject and trial was entered into Stan. In Stan, the Hamiltonian Monte Carlo algorithm is used as a Markov Chain Monte Carlo method (MCMC). MCMC approximates the posterior distribution of the free parameters of the model. In contrast to frequentist approaches, where only maximum likelihood point estimates for the combination of model parameters accounting best for a certain observation are obtained, the Bayesian approach results in distributions which assort a likelihood to every value of a parameter. The width of a parameter’s posterior distribution then directly corresponds to the probability of different parameter values, given the prior and the data. The posterior distribution can also be used to estimate intervals which most likely contain the true parameters, so-called highest posterior density intervals.
We ran four chains. Chain convergence was assessed using the \(\widehat{R}\) statistic, where we considered values of \(1 \le \widehat{R}\le 1.01\) acceptable. We additionally report the effective sample size, \(\widehat{ESS}\), which estimates the quality of the fitting process (Kruschke, 2015). Since the first iterations in a MCMC are highly biased, a certain number of iterations in the beginning are discarded. This is called the warmup or burn in period. We used 1000 burn-in iterations and retained a further 1000 samples for analysis. No thinning was applied. For \(\beta\), the prior was limited to the range \(0< \beta <3\); for \(\varphi\) and \(\rho\), uninformed priors were used, i.e., a uniform distribution with range \(- \infty\) to \(+ \infty\).
Model comparison was performed using the loo package in R, which uses a version of the loo estimate that was optimized using Pareto smoothed importance sampling (PSIS) (Vehtari et al., 2017). loo estimates the out-of-sample predictive accuracy of the model, i.e., how well the entire dataset without one data point predicts this excluded point.
Procedure for Parameter Recovery
To evaluate parameter recovery, a dataset with 125 subjects and 300 trials per subject was simulated. In the following, the number of subjects is referred to as nSubjects, and the number of trials as nTrials. Wilson and Collins (2019) propose to adjust the input values of simulations to empirical obtained behavioral results. Therefore, the input values for the Kalman Filter models as well as nTrials were adjusted to the empirical data obtained in the placebo condition by Chakroun et al. (2020). To obtain input values of \(\beta\), \(\varphi\) and \(\rho\), for each of the parameters, 125 values were drawn randomly from normal distributions fitted after their results. The true values of these distributions are reported in Table 2. These values resemble the values Chakroun et al. (2020)obtained in the placebo condition of their study. Here, the distribution of \(\beta\) was truncated to \(0.03 < \beta <3\), hence more extreme small values indicate an entirely random choice behavior, while bigger values than 3 indicate an entirely greedy strategy. Both strategies resemble extremes of behavior in the exploration–exploitation trade-off and do not allow further examination and differentiation between subjects applying this strategy. To check if the results of the parameter recovery of \(\beta\) generalize to different priors, the same data was fit once more using a gamma (2,4) distribution as a prior. Since \({\sigma }_{\rho }\) in the placebo condition in Chakroun et al. (2020) was very small, likely due to a shrinkage effect due to the hierarchical estimation, we used the standard deviation of the individual-subject posterior means in the placebo condition as \({\sigma }_{\rho }\). The random walk depicted in Fig. 1A was included as the underlying payoff structure. The choices were simulated based on specific parameter combinations. To this end, on each trial, a choice was simulated using the softmax function with choice probabilities based on the input parameters \({\beta }_{s},{\varphi }_{s}, {\rho }_{s}\) and the current trial-level estimates of \({\widehat{\mathrm\mu}}_{\mathrm j,\mathrm t}\) and \(\widehat{\mathrm\sigma}_{\mathrm j,\mathrm t}^2\).
To test for parameter recovery, the correlations of the input values of \({\beta }_{s},{\varphi }_{s}\) and \({\rho }_{s}\) and the means of the corresponding posterior distributions were estimated. Additionally, the correlations of the input values and the width of the HDIs of the parameters were calculated to check for changes of the quality of the fitting process throughout the parameter ranges. Posterior density was estimated using Silverman’s rule of thumb implemented in the R package “stats” (R Core Team, 2021) and the HDI was estimated using the R package “HDInterval” (Meredith & Kruschke, 2020). To check for independence of the different parameters, the correlations of the obtained values of all parameters with the posterior means and HDIs of both other parameters were calculated. These associations were graphically inspected.
To inspect the influence of the number of trials on the parameter recovery, a new set of simulations was created. Due to computational feasibility constraints, in this set, nSubjects in each simulation 64. The generation of input values of \({\beta }_{s},{\varphi }_{s}\) and \({\rho }_{s}\) was conducted like it was depicted above. In a first step, four simulations were conducted with nTrials = 100, 200, 300 and 500. Correspondingly, the first 100, 200, 300 and 500 trials of the random walks depicted in Fig. 1B were used. These simulations were fitted using 1000 iterations in the warmup and 1000 iterations in the sampling per chain. In a second round, to examine the range between 100 and 300 parameters in greater detail, simulations with nTrials = 150, 200, 250 and 300 were conducted. Hence in the first round some \(\widehat{R}\) parameters were questionable, the number of iterations was set to 1500 iterations in the warmup and 1500 iterations in the sampling per chain. In a third step, the simulation with nTrials = 100 was fitted again with 1500 iterations in the warmup and 1500 iterations in the sampling per chain and prior boundaries of -10 \(<\varphi <\) 20 and -20 \(<\rho <\) 40. In these analyses, the range of the different nTrials reflects the range which appears plausible as to be used in future human studies.
We next calculated model-agnostic behavioral metrics from all simulations, i.e., the percentage of switches, the total payout, the percentage of choices for the best option and the mean rank of the options. These model-agnostic behavioral results were correlated with the input values of \({\beta }_{s},{\varphi }_{s}\) and \({\rho }_{s}\) and their associations were graphically inspected. Additionally, it was checked whether it is possible to distinguish \(\beta\) and \(\rho\) based on non-modeling analyses. For this, it was observed that repetitive choices after trials with small rewards relate differentially to \(\beta\) and \(\rho\) than repetitive choices after trials with big rewards.
Procedure of Model Recovery
The procedure of checking for model recovery included the simulation of five datasets. Each one of these was based on the Kalman SMEP model, the Kalman SME model, the Kalman SM model, the Delta SM Model, and the Diff Delta SM Model. Each of these simulations were fit by all other models. These fits were compared regarding their goodness-of-fit.
All five simulations used nSubjects = 64 and nTrials = 300. The true values of the distributions of input parameters are reported in Table 2. In line with the proposal of Wilson and Collins (2019), for the Delta Rule and Diff Delate rule modes, plausible and interpretable parameter ranges were used.
Taken together, 320 subjects, i.e., 64 subjects based on each of the five models, were simulated. Each simulated subject was fit using each of the five models. The resulting fits were compared regarding their goodness-of-fit. As a measure of goodness-of-fit, PSIS-loo was estimated (Vehtari et al., 2017). PSIS-loo is sensitive to overfitting, so neither more complex models nor simpler models should be preferred by the inference criterion. If more complex model-based simulations are fit systematically better by simpler models this should be due to the implementation of non-informative parameters, while if more complex models fit data generated by simpler models better, this indicates that the more complex model implements a parameter which systematically explains random noise. This would then indicate a problem of the model and not of the criterion of model comparison. Higher loo values indicate a better fit, and the best-fitting model was determined for each simulated subject. Model recovery were then illustrated via confusion and inverse confusion matrices (Wilson & Collins, 2019). The confusion matrix quantifies the percentages of the subjects simulated based on a certain model \(i\) which are best fit by model \(j\). Each cell contains the percentage specified in Eq. (14). The inverse confusion matrix quantifies the percentages of all subjects fitted best by a certain model \(j\) which were simulated based on a certain model \(i\). Each cell contains the percentage specified in Eq. (15).
where \(sim=i\) indicates that the subject’s data was simulated based upon model \(i\) and \(bestfit=j\) indicates that model \(j\) was found to fit the subject’s data best. The rows of the confusion matrix, which contain all subjects simulated using the same model, sum up to 100 percent, while the columns of the inverse confusion matrix, which contain all subjects fitted best by the same model, sum up to 100 percent. High values along the diagonal indicate a good model recovery while high off-diagonal values indicate poor model recovery. Diagonal values for a model in the inverse confusion matrix indicate how reliable the result of a model comparison is, if the model comparison indicated this model to fit best for a dataset (Wilson & Collins, 2019).
Results
Parameter recovery
To perform parameter recovery for the Kalman SMEP model, a dataset with nSubjects = 125 and nTrials = 300 was simulated and fitted. The fitting process met the requirements of representativeness, accuracy, and efficiency. The sampling parameters of all fits conducted in the analysis of parameter recovery are reported in Supplement A, Table S1.
The Pearson correlations of the true values, i.e., the input values to the simulation, and the obtained values, i.e., the means of the posterior distributions, were for \(\beta\): \(r=\)0.91, for \(\varphi\): \(r=\)0.95 and for \(\rho\): \(r=\)0.93. The scatterplots of these correlations are depicted in Fig. 2: it is shown that the recovery of all parameters is generally good, while some, single values deviate from the true values. The 95% HDI is also generally rather small, indicating a concise estimation of the posterior distribution. For all parameters, the 95% HDIs include the true value. There is no apparent systematic bias. The fitting process did not introduce interdependencies. For details, see Fig. S1 in the supplements. This pattern was also robust when using a gamma (2,4) distribution as a prior of beta instead of the uniform prior \(0< \beta <3\), see supplement B, Fig. S1. To address the issue of robustness for noisier data, we selected the 25% of simulated datasets with the smallest values of beta, i.e., the highest levels of decision noise. We still obtained parameter recovery correlations Pearson correlations were for \(\beta\): \(r=\)0.94, for \(\varphi\): \(r=\)0.92 and for \(\rho\): \(r=\)0.89. These correlations indicate adequate parameter recovery even for the highest levels of decision noise simulated in the present analysis.

A: parameter recovery of β (softmax parameter); B: parameter recovery of φ (exploration bonus parameter); C: parameter recovery of ρ (perseveration parameter); the scatterplots show the correlation of the true values, i.e., the input values to the simulation, and the recovered values obtained in the fitting process; the mean of the posterior values is depicted as dots; the whiskers show the range of the 95% HDI; the red lines are the actual linear regression lines; the green lines show the linear regression lines for a perfect parameter recovery
To inspect the influence of the number of trials on parameter recovery, multiple simulations and fits were created. The results of the parameter recovery for different numbers of trials are summarized in Table 3: as expected, parameter recovery improves as the number of trials increases. However, even for n = 100 trials, parameter recovery was found to be acceptable.
Associations with Performance Metrics
Subsequently, we investigated how the free parameters of the Kalman SMEP model relate to the model-agnostic performance metrics (Table 4, Fig. 3, i.e., total payout, percentage of trials in which the best option was chosen, mean rank of the chosen bandit, percentage of switch trials). The Pearson correlations of all measures and true parameters were calculated (see Table 4). In Fig. 3, the relationship of the free model parameters of the Kalman SMEP model and the model-agnostic measures are examined more closely. Hence the three examined performance metrics, the payout, the percentage of best-option choices and the mean of rank of the chosen option are highly intercorrelated, only the effects on the payout and the switches were analyzed. The following associations base on visual inspection. Higher values of \(\beta\) are associated with higher payouts and fewer switches (Fig. 3A). The payout and the number of switches reach an asymptotical level, see plots A and B. Regarding \(\varphi\), the payout obtained reaches a maximum for true values of \(\varphi =\) 1.1. Both lower and higher values of \(\varphi\) lead to a reduced payout (Fig. 3C), confirming the expected inverse-U-shaped relationship between directed exploration and performance. The percentage of switches increases approximately linearly with \(\varphi\), within the examined range of input values (Fig. 3D). Regarding the effect of \(\rho\) on the payout, there is a slight, approximately linear growth of the payout for higher values of \(\rho\) within the examined range, and a strong, approximately linear decrease of the percentage of switches for higher values of \(\rho\) within the examined range (Fig. 3E and F).

Relation of free parameters of the Kalman SMEP model and model-agnostic behavioral measures: A and B: relation of β (softmax parameter) with payout and percentage of switches; C and D: relation of φ (exploration bonus parameter) with payout and percentage of switches; E and F: relation of ρ (perseveration parameter) payout and percentage of switches; true values are the input values to the simulation; payout refers to the total payout of one subject; percentage of switches refers to the percentage of trials in which another option was chosen than on the trial before; the linear regression lines and their 95% confidence interval are depicted in blue; in C, additionally the quadratic regression line and its 95% confidence interval are depicted in red
Simulated subjects with higher values of \(\rho\) tend to repeat choices after small rewards (< 50) in a similar extend as compared to after big rewards (> 50), while simulated subjects with higher values of \(\beta\) tend to perseverate after big rewards, but not after small rewards, see Fig. 4.

Model-Agnostic Differentiation between Perseveration and Exploitation. \(\beta\) is the softmax parameter; \(\rho\) is the perseveration parameter; the number of repetitive choices is the absolute number of trials, in which the same option was chosen like in the trial before (t-1), if, for A and B, the reward in t-1 was bigger than 50 and, for C and D, if the reward in t-1 was smaller than 50. 50 is the a priori expected mean of rewards in the environment
Model Recovery
To check for model recovery, five datasets with nSubjects = 64 and nTrials = 300 each were simulated, based on the Kalman SMEP model, the Kalman SME model, the Kalman SM model, the Delta SM model, and the Diff Delta SM model. Each simulated subject was again fitted using all models and compared with respect to loo-based goodness-of-fit.
Figure 5 shows the confusion and inverse confusion matrices. 79.69% of subjects simulated based on the Kalman SMEP model were best fit by the Kalman SMEP model, i.e. showed successful model recovery. Some simulations were erroneously found to be fit best by the other Kalman Filter models (7.81% by Kalman SM, 10.94% by Kalman SME), whereas few were best recovered by the Delta Rule Models (1.56% by Diff Delta SM). Correspondingly, 83.61% of the simulated subjects best fit by the Kalman SMEP model were indeed simulated by the Kalman SMEP model. In some cases, the Kalman SMEP Model erroneously fitted Kalman SME simulations (13.11%) and Kalman SM simulations (3.28%). There were no cases in which the Kalman SMEP model falsely accounted for Delta Rule simulations.

Model Recovery: Confusion Matrix and Inverse Confusion Matrix: SM: softmax; E: exploration bonus; P: perseveration, Diff Delta: Delta rule with differential learning rates for positive and negative prediction errors; the goodness-of-fit was compared using Pareto smoothed importance sampling leave-one-out cross validation; A: confusion matrix of models: percentage of all subjects simulated based on a certain model that are fitted best by a certain model; B: inverse confusion matrix: percentage of all subjects fitted best by a certain model that are simulated based on a certain model
In addition to these overall acceptable features of the Kalman SMEP model, the confusion and the inverse confusion matrices indicate that Kalman Filter and Delta Rule models were well distinguishable from each other. In contrast, the Delta Rule SM model and the Diff Delta rule SM models are, given the range of input parameters applied, almost indistinguishable. Also, the model recovery of the Kalman SME model is questionable: only 46.88% of the simulations based on the Kalman SME model were recovered successfully and only 71.43% of the simulations the Kalman SME fitted best were really based on it. In addition to estimating the confusion matrices based on single subject’s loo values, the loo estimations of the entire datasets were compared. Based on the entire dataset, each of the simulations is fit best by the truly underlying model. See Table S2 of supplement.
Discussion
The current study examined parameter and model recovery of reinforcement learning models for restless bandit problems. We focused on the Kalman SMEP model that has been shown to account for human data better than a range of competing (Chakroun et al., 2020; Wiehler et al., 2021), but we also examined restricted versions of that model, as well as Delta rule models, for comparison. The Kalman SMEP model combines a Kalman Filter or Bayesian Learner learning rule with a softmax decision rule with additional terms for directed exploration (exploration bonus) and perseveration. We show that the Kalman SMEP model exhibits good parameter and model recovery, even for as few as 100 trials per simulated subject. Parameters show the expected associations with model free performance metric.
For parameter recovery, correlations between true and recovered values of the Kalman SMEP model were examined, with 300 simulated trials per subject. The correlations of true and obtained values indicated a good parameter recovery (r′s > 0.9). The graphical inspection of the scatterplots indicated no systematic biases. Examining the influence of the number of trials of the bandit task on parameter recovery of the Kalman SMEP model, datasets were simulated with trial numbers between 100 and 500. Correlations of true and estimated parameter values generally increased with the number of trials (100 trials: 0.82 – 0.87; 500 trials: 0.94 – 0.96). The three examined performance metrics, the payout, the percentage of best-option choices and the mean of rank of the chosen option are highly intercorrelated; therefore, mainly the effects on the payout were analyzed. Associations between true parameter values and model-agnostic performance metrics were observed based on visual inspection: it was confirmed that, for higher values of \(\beta\), payout increased while switches decreased. For higher true values of \(\varphi\), the frequency of switches increases, and for higher values of \(\rho\), the frequency of switches decreased. We also confirmed an inverted-U-shaped association between \(\varphi\) and payout, such that both a lack and an excess of directed exploration led to performance decrements. Contrary to expectations, within the examined range of parameter values, higher values of \(\rho\) did not consistently result in a reduced payout. We assume that this result is due to the specific volatility of the chosen environment and the range of \(\rho\) simulated. We expect that higher volatile environments lead to harder punishment of perseveration behavior.
We examined model recovery for a set of candidate models, consisting of Kalman SMEP, SME and SM models, the Delta SM model, and the Diff Delta SM model. Examination of the confusion and inverse confusion matrices showed acceptable model recovery of the Kalman SMEP model: 79.69% of simulations based on the Kalman SMEP model were recovered correctly, 83.61% of the fits accounted for best by the Kalman SMEP were in fact simulated based upon this model. Generally, model recovery performance of this model was better than for the simpler nested versions of the Kalman Filter and for the Delta rule models. The Kalman Filter and Delta rule models were well distinguishable from each other.
Implications for Empirical Research
Our simulations have implications for empirical research applications of these models. Research using model fitting to compare parameter values between populations or conditions (Addicott et al., 2021; Chakroun et al., 2020; Wiehler et al., 2021; Zajkowski et al., 2017) can regard the correlation of true and recovered parameter values as an indicator of statistical power. Small effects might not be detected, if the accuracy of parameter recovery is not sufficient (Wilson & Collins, 2019). Also, parameter recovery sets a limit to the reliability of a measurement, such that e.g. the test–retest reliability for a given model parameter cannot exceed the correlation of true vs. recovered parameter values, even if there was a perfect temporal stability of the trait that is measured by the respective parameter.
Hence, the correlation of true and recovered variables sets a limit to the accuracy of the measurement of individual parameters, and design decisions (such as the number of trials) need to be adjusted accordingly. Even for only 100 trials, correlations of true and recovered parameter were still > 0.8. For studies with a large number of participants and otherwise strong manipulations or covariates this might still be sufficient. In studies with fewer participants or weaker manipulations, larger numbers of trials might be necessary to ensure adequate power.
The model-agnostic measures of payout, the mean of the rank of the chosen option and the percentage of choices for the best option can be regarded as measures reflecting the balance of exploration and exploitation, while the number of switches only reflects overall exploration. Higher values of \(\beta\), i.e., less random exploration, leads to a better performance (i.e. higher payout). This is in line with the conceptualization of random exploration as an inferior exploration strategy (Meder et al., 2021), which requires only little cognitive resources and is implemented in a simpler fashion into cognitive and neural processes by using neural or environmental noise to randomize choice (Zajkowski et al., 2017). Directed exploration, on the other hand, as reflected in the exploration bonus parameter \(\varphi\), showed an inverted-U-shaped association with task performance. This resembles the theoretically-predicted inverted-U-shaped relation of exploration, exploitation, and performance, as described e.g., by Addicott et al. (2017). The disadvantages of diminished as well as excessive exploration can be observed in different psychiatric conditions: While several substance use disorders and gambling disorder are associated with diminished exploration (Morris et al., 2016; Wiehler et al., 2021), attention deficit hyperactivity syndrome and schizophrenia are associated with excessive exploration. The finding that increasing perseveration behavior, captured as \(\rho\), leads to enhanced or unchanged performance in the bandit task contrasts with the conception of perseveration as a bounded rational strategy that saves cognitive resources on costs of performance accuracy (Gershman, 2020). Research mainly addressing perseveration behavior should consider this carefully. The relationship of the input parameters and the number of switches met the expectations and underlines the validity of the parameter’s implementation in the Kalman SMEP model: the percentage of switches decreases for higher values of \(\beta\) and \(\rho\) and increases for higher values of \(\varphi\). This means, both exploration strategies lead to more switches, while perseveration leads to fewer switches. Perseveration and exploitation can be differentiated in a model-agnostic analysis, if the proportion of repetitive choices after trials with high reward is compared to the proportion of repetitive choices after low reward.
The analysis of model recovery revealed that the Kalman SMEP model was distinguishable from the chosen set of candidate models. Model recovery of the Kalman SM, Kalman SME, Delta SM and Diff Delta SM model were also examined. The Delta SM and the Diff Delta SM model could be distinguished from the Kalman Filter models, whereas they were hardly distinguishable from each other. This could be a model feature, but it could also be due to the chosen range of input parameters. Still, empirical studies using model comparison to distinguish these models should be careful about the interpretation of their result.
Daw et al. (2006) used model comparison to distinguish the Kalman SME, Kalman SM and Kalman \(\varepsilon\)-greedy model. The Kalman SM model accounted best for the behavior of the sample (n = 14). Regarding model recovery of the Kalman SME model, even if the Kalman SME model would have been the model accounting best for the underlying decision process, the chances of Daw et al. (2006) to find this would have been limited. Chakroun et al. (2020) compared the estimates of \(\varphi\) for their empirical data between the Kalman SMEP and the Kalman SME model and found that the estimates are significantly higher in the Kalman SMEP model. This is likely due to the fact that, without a perseveration term, perseveration in the SME model is accounted for by fitting an “uncertainty-avoiding” exploration bonus parameter (Chakroun et al., 2020). Thus, our model recovery results suggest that studies might benefit from preferentially using the Kalman SMEP model rather than the Kalman SME model, even in cases in which they do not explicitly investigate perseveration behavior.
Limitations
The current study has a number of limitations that need to be acknowledged. First, the examined models and the restless bandit task are tightly bound to each other. While we can assume that the Kalman SMEP model entails good parameter and model recovery for all situations in which payoff distributions follow a random walk, this study cannot proof the eligibility of Kalman Filter models in tasks with different payoff structures like leapfrog tasks (Knox et al., 2011), stationary bandit tasks (Sutton & Barto, 1998), or reversal learning (Izquierdo et al., 2017), etc.). Still there is a broad applicability of the current analysis, hence restless environments are popular in clinical and non-clinical studies (Addicott et al., 2013, 2021; Wiehler et al., 2021) as well as in animal studies (Marshall & Kirkpatrick, 2017). Typically, Kalman Filter models implement the true structure of the bandits’ random reward walks with fixed parameters. Ideally, these parameters also should be implemented as free parameters that are fitted during parameter estimation. Attempting to do so, models containing multiple subjects did not converge. Probably, the parameter recovery of the Kalman SMEP is affected when all parameters are fit.
Within the class of restless bandit tasks, there are some variations not explicitly addressed here: changing the volatility of the random walks in the payoff structure or the number of arms might lead to a slightly better or worse parameter and model recovery. Regarding the effect of the number of trials on parameter recovery, a larger range of different trial numbers of trials might have been informative. Due to computational feasibility constraints, these additional simulations and fits were not carried out. Finally, is not possible to compare exhaustive sets of models in model recovery analyses (Wilson & Collins, 2019). Still, there are some shortcomings to the current analysis: The Kalman SMEP model was the most complex model of the Kalman Filter models examined. Thus, the ability to distinguish the Kalman SMEP model from Delta Rule models and more restricted Kalman Filter models was examined, while the ability to distinguish this model from other potentially more complex models was not further explored. Parameter and model recovery are dependent on the method used for the fitting. Thus, using different fitting methods like maximum likelihood might lead to different results than the here chosen MCMC approach. Empirical studies involving computational modeling often use hierarchical modeling to estimate individual parameters and group differences at once (Chakroun et al., 2020; Raja Beharelle et al., 2015; Wiehler et al., 2021).In this study, we focused on fitting single subject values. Adding a hierarchical level to the model might influence the outcomes of parameter and model recovery on the subject level.
Conclusion
The present study examined the parameter and model recovery of the Kalman SMEP model for restless bandit problems. Parameter recover of the Kalman SMEP was excellent for 300 trials, and acceptable even for as few as 100 trials per simulated subject. Model parameters of the Kalman SMEP model showed associations with model-agnostic measures of performance and behavior, in line with their typical psychological interpretations. Model recovery confirmed that the Kalman SMEP model was distinguishable from simpler nested Kalman Filter models as well as Delta Rule models. Future empirical studies that utilize computational reinforcement learning models in the context of restless bandit problems may benefit from the simulation work reported here.
Data Availability
All data and material are available on the website of the Open Science Foundation: https://osf.io/2e69y/
Code Availability
The entire code is available on the website of the Open Science Foundation: https://osf.io/2e69y/
Abbreviations
- BIC:
-
Bayesian information criterion
- Diff Delta rule:
-
Delta rule with differential learning rates for positive and negative prediction errors
- HDI:
-
Highest density interval
- HMC:
-
Hamiltonian Monte Carlo
- loo:
-
Leave-one-out cross validation
- LOWESS:
-
Locally weighted scatterplot smoothing
- MCMC:
-
Markov Chains Monte Carlo
- nSubjects:
-
Number of subjects
- nTrials:
-
Number of trials
- PSIS:
-
Pareto smoothed importance sampling
- RL:
-
Reinforcement learning
- RPE:
-
Reward prediction error
- SM:
-
Softmax
- SME:
-
Softmax, exploration bonus
- SMEP:
-
Softmax, exploration bonus, perseveration bonus
- SPE:
-
State prediction error
- TD:
-
Temporal discounting
- TMS:
-
Transcranial magnet stimulation
- UCB:
-
Upper confidence bound
- \(\alpha\) :
-
Learning rate
- \({\alpha }^{+}\) :
-
Learning rate for positive prediction errors
- \({\alpha }^{-}\) :
-
Learning rate for negative prediction errors
- \(\beta\) :
-
Softmax temperature parameter (inverse random exploration)
- \(\delta\) :
-
Reward prediction error
- \(\vartheta\) :
-
Decay center
- \(\mathrm{\rm K}\) :
-
Kalman learning rate
- \(\lambda\) :
-
Decay parameter
- \(\mu\) :
-
Mean of subjective reward probability distribution
- \({\mu }_{\beta }\) :
-
Mean of input values of the softmax parameter
- \({\mu }_{\varphi }\) :
-
Mean of input values of the exploration bonus parameter
- \({\mu }_{\rho }\) :
-
Mean of input values of the perseveration bonus parameter
- \(\rho\) :
-
Perseveration bonus parameter
- \({\sigma }^{2}\) :
-
Variance of subjective reward probability distribution
- \({\sigma }_{D}^{2}\) :
-
Variance of decay
- \({\sigma }_{o}^{2}\) :
-
Variance of observation
- \({\sigma }_{\beta }\) :
-
Standard deviation of input values of the softmax parameter
- \({\sigma }_{\varphi }\) :
-
Standard deviation of input values of the exploration bonus parameter
- \({\sigma }_{\rho }\) :
-
Standard deviation of input values of the perseveration bonus parameter
- \(\varphi\) :
-
Exploration bonus parameter
- \(\widehat{ESS}\) :
-
Effective sample size
- \({\widehat{ESS}}_{min}\) :
-
Minimal effective sample size
- \(v\) :
-
Expected reward value
- \(r\) :
-
Reward
- \(\widehat{R}\) :
-
Estimation for merging of MCMCs
- \({\widehat{R}}_{max}\) :
-
Maximal \(\widehat{R}\), indicates most detrimental merging of MCMCs
References
Addicott, M. A., Pearson, J. M., Schechter, J. C., Sapyta, J. J., Weiss, M. D., & Kollins, S. H. (2021). Attention-deficit/hyperactivity disorder and the explore/exploit trade-off. Neuropsychopharmacology : Official Publication of the American College of Neuropsychopharmacology, 46(3), 614–621. https://doi.org/10.1038/s41386-020-00881-8
Addicott, M.A., Pearson, J.M., Sweitzer, M.M., Barack, D.L ., Platt, M.L.M.L. (2017). A Primer on Foraging and the Explore/Exploit Trade-Off for Psychiatry Research. Neuropsychopharmacology : Official Publication of the American College of Neuropsychopharmacology, 42(10), 1931-1939. https://doi.org/10.1038/npp.2017.108.
Addicott, M.A., Pearson, J.M., Wilson, J., Platt, M.L., Michael, L., & McClernon, F.J. (2013). Smoking and the bandit: A preliminary study of smoker and nonsmoker differences in exploratory behavior measured with a multiarmed bandit task. Experimental and Clinical Psychopharmacology, 21(1), 66-73. https://doi.org/10.1037/a0030843.
Aust, F., & Barth, M. (2020). papaja [Computer software]. https://github.com/crsh/papaja
Badre, D., Doll, B. B., Long, N. M., & Frank, M. J. (2012). Rostrolateral prefrontal cortex and individual differences in uncertainty-driven exploration. Neuron, 73(3), 595–607. https://doi.org/10.1016/j.neuron.2011.12.025
Blanchard, T. C., & Gershman, S. J. (2018). Pure correlates of exploration and exploitation in the human brain. Cognitive, Affective & Behavioral Neuroscience, 18(1), 117–126. https://doi.org/10.3758/s13415-017-0556-2
Cazé, R. D., & van der Meer, M. A. A. (2013). Adaptive properties of differential learning rates for positive and negative outcomes. Biological Cybernetics, 107(6), 711–719. https://doi.org/10.1007/s00422-013-0571-5
Chakroun, K., Mathar, D., Wiehler, A., Ganzer, F., Peters, J., 2020. Dopaminergic modulation of the exploration/exploitation trade-off in human decision-making eLife 9. https://doi.org/10.7554/eLife.51260
Chakroun, K. (2019). Dopaminergic modulation of the explore/exploit trade-off in human decision making [Doctoral dissertation, Universität Hamburg]. https://ediss.sub.uni-hamburg.de/handle/ediss/8237
Cogliati Dezza, I., Yu, A. J., Cleeremans, A., & Alexander, W. (2017). Learning the value of information and reward over time when solving exploration-exploitation problems. Scientific Reports, 7(1), 16919. https://doi.org/10.1038/s41598-017-17237-w
Conigrave, J. (2020). corx (Version 1.0.6.1) [Computer software].
Constantino, S. M., & Daw, N. D. (2015). Learning the opportunity cost of time in a patch-foraging task. Cognitive, Affective & Behavioral Neuroscience, 15(4), 837–853. https://doi.org/10.3758/s13415-015-0350-y
Daw, N. D., O’Doherty, J. P., Dayan, P., Seymour, B., & Dolan, R. J. (2006). Cortical substrates for exploratory decisions in humans. Nature, 441(7095), 876–879. https://doi.org/10.1038/nature04766
Gelman, A., Lee, D., & Guo, J. (2015). Stan. Journal of Educational and Behavioral Statistics, 40(5), 530–543. https://doi.org/10.3102/1076998615606113
Gershman, S. J. (2020). Origin of perseveration in the trade-off between reward and complexity. Cognition, 204, 104394. https://doi.org/10.1016/j.cognition.2020.104394
Izquierdo, A., Brigman, J. L., Radke, A. K., Rudebeck, P. H., & Holmes, A. (2017). The neural basis of reversal learning: An updated perspective. Neuroscience, 345, 12–26. https://doi.org/10.1016/j.neuroscience.2016.03.021
Knox, W. B., Otto, A. R., Stone, P., & Love, B. C. (2011). The nature of belief-directed exploratory choice in human decision-making. Frontiers in Psychology, 2, 398. https://doi.org/10.3389/fpsyg.2011.00398
Kruschke, J. K. (2015). Doing Bayesian data analysis: A tutorial introduction with R, JAGS, and Stan (Edition 2). Elsevier Academic Press. https://ebookcentral.proquest.com/lib/kxp/detail.action?docID=5754481
Marshall, A. T., & Kirkpatrick, K. (2017). Reinforcement learning models of risky choice and the promotion of risk-taking by losses disguised as wins in rats. Journal of Experimental Psychology. Animal Learning and Cognition, 43(3), 262–279. https://doi.org/10.1037/xan0000141
Meder, B., Wu, C. M., Schulz, E., & Ruggeri, A. (2021). Development of directed and random exploration in children. Developmental Science, 24(4), e13095. https://doi.org/10.1111/desc.13095
Mehlhorn, K., Newell, B. R., Todd, P. M., Lee, M. D., Morgan, K., Braithwaite, V. A., Hausmann, D., Fiedler, K., & Gonzalez, C. (2015). Unpacking the exploration–exploitation tradeoff: A synthesis of human and animal literatures. Decision, 2(3), 191–215. https://doi.org/10.1037/dec0000033
Meredith, M., & Kruschke, J. K. (2020). HDInterval (Version R package version 0.2.2.) [Computer software]. https://CRAN.R-project.org/package=HDInterval
Morris, L. S., Baek, K., Kundu, P., Harrison, N. A., Frank, M. J., & Voon, V. (2016). Biases in the Explore-Exploit Tradeoff in Addictions: The Role of Avoidance of Uncertainty. Neuropsychopharmacology, 41(4), 940–948. https://doi.org/10.1038/npp.2015.208
Palminteri, S., Wyart, V., & Koechlin, E. (2017). The Importance of Falsification in Computational Cognitive Modeling. Trends in Cognitive Sciences, 21(6), 425–433. https://doi.org/10.1016/j.tics.2017.03.011
Payzan-Lenestour, E., & Bossaerts, P. (2012). Do not Bet on the Unknown Versus Try to Find Out More: Estimation Uncertainty and “Unexpected Uncertainty” Both Modulate Exploration. Frontiers in Neuroscience, 6, 150. https://doi.org/10.3389/fnins.2012.00150
Raja Beharelle, A., Polanía, R., Hare, T. A., & Ruff, C. C. (2015). Transcranial Stimulation over Frontopolar Cortex Elucidates the Choice Attributes and Neural Mechanisms Used to Resolve Exploration-Exploitation Trade-Offs. The Journal of Neuroscience : THe Official Journal of the Society for Neuroscience, 35(43), 14544–14556. https://doi.org/10.1523/JNEUROSCI.2322-15.2015
R Core Team. (2021). R (Version Version 4.0.3) [Computer software]. R Foundation for Statistical Computing. Vienna, Austria. https://www.R-project.org/
Rescorla, R. A., & Wagner, A. R. (1972). A Theory of Pavlovian Conditioning: Variations in the Effectiveness of Reinforcement and Nonreinforcement.
Speekenbrink, M., & Konstantinidis, E. (2015). Uncertainty and exploration in a restless bandit problem. Topics in Cognitive Science, 7(2), 351–367. https://doi.org/10.1111/tops.12145
Stan Development Team. (2021). Stan (Version 2.21.0) [Computer software]. https://mc-stan.org
Sutton, R. S., Bach, F., & Barto, A. G. (2018). Reinforcement Learning: An Introduction (2nd ed.). MIT Press Ltd.
Sutton, R. S., & Barto, A. G. (1998). Reinforcement learning: An introduction. MIT Press.
Tversky, A., & Edwards, W. (1966). Information versus reward in binary choices. Journal of Experimental Psychology, 71(5), 680–683. https://doi.org/10.1037/h0023123
VandenBos, G. R. (2015). APA dictionary of psychology (2nd ed.). American Psychological Association. https://doi.org/10.1037/14646-000
van der Linden, D., Frese, M., & Meijman, T. F. (2003). Mental fatigue and the control of cognitive processes: Effects on perseveration and planning. Acta Psychologica, 113(1), 45–65. https://doi.org/10.1016/S0001-6918(02)00150-6
Vehtari, A., Gelman, A., & Gabry, J. (2017). Practical Bayesian model evaluation using leave-one-out cross-validation and WAIC. Statistics and Computing, 27(5), 1413–1432. https://doi.org/10.1007/s11222-016-9696-4
Vehtari, A., Magnusson, M., Yao, Y., Bürkner, P., Paananen, T., & Gelman, A. (2020). loo (Version 2.4.0) [Computer software]. https://mc-stan.org/loo/
Wiehler, A., Chakroun, K., & Peters, J. (2021). Attenuated Directed Exploration during Reinforcement Learning in Gambling Disorder. The Journal of Neuroscience, 41(11), 2512–2522. https://doi.org/10.1523/JNEUROSCI.1607-20.2021
Wilson, R. C., Bonawitz, E., Costa, V. D., & Ebitz, R. B. (2021). Balancing exploration and exploitation with information and randomization. Current Opinion in Behavioral Sciences, 38, 49–56. https://doi.org/10.1016/j.cobeha.2020.10.001
Wilson, R.C., Collins, A.G. (2019). Ten simple rules for the computational modeling of behavioral data eLife 8. https://doi.org/10.7554/eLife.49547
Wilson, R. C., Geana, A., White, J. M., Ludvig, E. A., & Cohen, J. D. (2014). Humans use directed and random exploration to solve the explore-exploit dilemma. Journal of Experimental Psychology. General, 143(6), 2074–2081. https://doi.org/10.1037/a0038199
Zajkowski, W. K., Kossut, M., & Wilson, R. C. (2017). A causal role for right frontopolar cortex in directed, but not random, exploration. ELife, 6, Article e27430. https://doi.org/10.7554/eLife.27430
Funding
Open Access funding enabled and organized by Projekt DEAL. This work was supported by Deutsche Forschungsgemeinschaft (PE1627/5–1 to J.P.).
Author information
Authors and Affiliations
Contributions
L.D. and J.P. conceived the study; L.D. performed all simulations and analyses, with input and guidance from D.T., E.S., D.M. and J.P.; D.T., E.S. and D.M. contributed analytical tools. L.D. wrote the paper, and all authors provided revisions.
Corresponding author
Ethics declarations
Ethics Approval and Consent to Participate
Does not apply since no data from participants were collected.
Consent for Publication
All authors consent to the publication of this manuscript.
Preprint
The manuscript was uploaded to biorxiv.org for timely dissemination.
Conflicts of Interest
The authors have declared no competing interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Danwitz, L., Mathar, D., Smith, E. et al. Parameter and Model Recovery of Reinforcement Learning Models for Restless Bandit Problems. Comput Brain Behav 5, 547–563 (2022). https://doi.org/10.1007/s42113-022-00139-0
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42113-022-00139-0