
Abstract
In this application paper, the influence of the coolant mantle on the acoustic radiation behaviour of a hybrid drive train is investigated. This was done on an electric machine on an acoustic component test bench. The coolant mass flow around the electric machine stator was varied and then completely drained. The electrical machine remained mechanically unchanged; any variations were made to the feed pumps on the test bench side. Triaxial acceleration sensors are glued to the machine housing and reviewed as evaluation criteria. For the evaluation, the square mean value of all three spatial directions of the glued acceleration sensors was calculated. The evaluation shows that there is no significant acoustic difference between an active stator cooling jacket and a stationary stator cooling jacket. If the stator cooling jacket is pumped out empty so that air remains in it, there is a strong reduction in surface acceleration. The observations are confirmed by analytical literature values. The results presented serve as a basis for further work and developments.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Hybrid electric vehicles are part of the next development stage of the automotive industry. In these vehicles, the drive system will be extended by a further electric drive system. One of the challenges is the acoustic emissions of such a drive system. Although the electric machine is quieter than a conventional combustion engine, it has a wider frequency spectrum that can put a stress on the occupants. To reduce occupant’s stress and increase vehicle and driving comfort in the passenger compartment, it is important to ensure a low noise level during development.
In the context of this application paper, the influence of the coolant mantle on the acoustic radiation behaviour of a hybrid powertrain is therefore investigated. The architecture of a hybrid vehicle considered in this paper is a P2-hybrid. In this architecture, the electric machine is positioned between the conventional combustion engine and the manual transmission. This makes it possible both to increase the power of the combustion engine and to drive the vehicle completely electrically without using the combustion engine [1].
The electrical machine is operated on a component acoustic test bench for the purposes of this study. On this test bench, the coolant mantle of the electric machine is varied. The acceleration of the machine’s surface during operation is measured and the change is evaluated by the coolant mantle variation.
2 Previous work
2.1 Electric machine
A large number of operating principles and designs are known for the electric drive machine. The machine in focus is a permanent-magnet synchronous motor. The name comes from the use of permanently excited magnets, in this case in the rotor. The electric magnetic field of the rotor follows synchronously the magnetic rotating field of the stator coils. The windings of the stator coils are fed with a three-phase alternating current. The amount of charge Q in the conductors of the stator coils interacts with the density of the magnetic field B of the permanent magnets. This interaction is orthogonal to the magnetic field B and results in the Lorentz force FL. This same force sets the rotor in motion [1,2,3,4]:
Based on this understanding, the magnetic field in the air gap between the rotor and stator can be described. According to Faraday, the force acting in the air gap can be described as surface tension. This definition can be extended with Maxwell so that the surface tension p is proportional to the density of the magnetic field [3, 5]:
According to Faraday and Maxwell, the radial and tangential tension components pr and pt result in [6]:
The tangential tension component and the reaction force in the rotor of the electric machine are used as power output into the gearbox. The radial component, on the other hand, is considered parasitic as it leads to structural excitation in the radial direction. The periodic force excitations also cause periodic oscillations in the machine and the housing. These oscillations in its amplitudes and frequencies result in the acoustic emissions of the drive unit. For an initial estimation of the structure-borne sound, it is therefore sufficient to consider the sound velocity on the machine surface [7, 8].
2.2 Impedance
The resistance, which a structure or a material opposes to an excitation force, is called impedance ZF in technical mechanics. This excitation force can be mechanical, thermal or acoustic. In this case, it is the electromagnetic forces in the air gap between stator and rotor. The analytical calculation of the impedance for longitudinal waves can be taken from the technical literature [9]. Literature values of the longitudinal impedances for different materials are listed in Table 1 [10].
The impedance can be used to calculate how the energy balance at the boundary layer of two media behaves. The reflected part is determined with the reflectance ρ and can be calculated from the reflection factor r as follows [9, 11]:
The energy balance for the degree of reflection \(\rho\) and the degree of absorption α can be divided into a measure of the degree of transmission τ and the degree of dissipation δ:
In a first approximation, the dissipation in the thin film considered in this case can be neglected, so that the transmitted part of the introduced energy is calculated by:
The following Table 2 shows exemplary reflectance \(\rho\) and transmittance \(\tau\) for different material transfers.
The characteristic sound radiation of the electrical machine can be influenced and changed in different ways. On the one hand, the housing can be shielded and encapsulated. On the other hand, measures can be found to reduce the parasitic electromagnetic excitation forces [12]. Finally, the transmission path between the excitation forces and the radiating surface can be manipulated.
2.3 Proposed approach
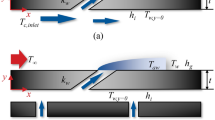
The stator of the electric machine under consideration is embedded in an outer housing, the transmission housing. In the installed state, a thin gap is formed between components. Oil flows through this gap for cooling purposes (Fig. 1). The aim of the experimental investigations is to investigate the influence of the mechanical impedance of the coolant thin film on the acoustic radiation of the transmission housing. For this purpose, the operating conditions of the coolant liquid are varied (Table 3).

Visualization of the experimental setup: electric machine inside the transmission housing, including the coolant mantle and the sensor position
The entire assembly (electric machine inside the transmission housing) is operated on a component acoustic test bench. This is a reverberation chamber. It is equipped with sound-absorbing walls and ceiling, only the floor consists of a rigid and sound-reflecting floor. On this test bench, the coolant liquid can be varied on the test bench side so that the electrical machine can be operated under different conditions without mechanical changes or modifications. The machine is flanged to a brake. This is located in the adjacent technical room, outside the measuring room. A connecting shaft is sound-absorbing encapsulated. The electric machine is supplied with oil for cooling and lubrication via connected hydraulic lines. Feed pumps and the tank for this oil are also located in the adjacent technical room. The electrical high-voltage supply and control of the electrical machine are provided by the power electronics. This is commanded from the control room.
Measurement technology is also used to record the acoustic response variables on the transmission housing. The surface of the transmission housing and other parts of the test stand are covered with 16 triaxial acceleration sensors. These are used to record the structure-borne sound. The positions of the sensors are chosen to be on critical structures like ribs and oscillating surfaces, far from any ribs and stiffeners. For this paper only the sensor data from the oscillating surfaces are considered. For the airborne sound nine microphones are systematically distributed in the room. The data from these microphones are not relevant for this application. The electrical machine is operated successively under several load levels, while the speed increases linearly over time. The data of the measurement are recorded with the software PAK of the company Müller-BBM and evaluated afterwards. These data for the structure-borne noise are broken down into the characteristic engine orders. During all measurements, care was taken to ensure that the temperatures in the stator are identical at the beginning of each measurement.
In the first version of the measurement, a volume flow of 10 L/min flows through the coolant thin film. The feed pumps remain in operation. In the next variant the volume flow is reduced to 0 L/min. The feed pumps are switched off and the remaining coolant mass remains in the cooling jacket between the stator of the electric machine and the transmission housing. For the last variant of the measurement, the oil is sucked out of the transmission housing with the aid of the feed pumps, so that the gap with ambient air remains. The feed pumps are also deactivated.
3 Experiments
This section presents the results of the experiments carried out. Results from all three variants are plotted for two load cases: 100 Nm and 350 Nm. The vector products of the measured surface velocities above the increasing speed are shown.
Multiple surface velocities are determined by calculating the first integral of the acceleration from the multiple triaxial acceleration sensors. Afterwards one single surface velocity is generated by calculating the root mean square from the multiple surface velocities and plotted on a logarithmic scale. The calculation considers only the eight sensors, which are located on free and oscillating surfaces of the transmission housing (see Sect. 2). By application of the Fourier transformation the data from the surface velocities were broken down into their characteristic engine orders 20, 40 and 60. This whole process was done for several loads.
Figure 2 shows the amounts of the surface velocities of the engine order 20 over the increasing engine speed. The left half shows a load of 100 Nm, the right half an increased load of 350 Nm. It can be seen that in both load cases the differences between variant 1 “Standard” and variant 2 “Standing” are slight. The growth functions are equivalent. At the low load of 100 Nm a reduction of the surface velocity for a standing fluid at about 1000 min−1 is visible. For the entire speed range considered, variant 3 “pumped out” shows a reduction in surface velocity.

Magnitude of the surface velocity of the 20th engine order—left: 100 Nm load, right: 350 Nm load
Engine order 40 is represented in Fig. 3 and is equivalent to the preceding engine order 20. The curve in variant 2 “Standing” is identical to variant 1 “Standard” in wide speed ranges under a load of 100 Nm. The surface velocity in variant 2 “Standing” is only lowered in the excessive increase around 1000 min−1. Under a load of 350 Nm up to 3500 min−1 there are no differences between variant 1 “Standard” and variant 2 “Standing”. When the speed increases, the surface velocity is reduced in variant 2 “Standing”. In both load cases, variant 3 “pumped out” results in the lowest surface velocities. Especially for higher engine speeds from 2700 min−1, variant 3 “pumped out” leads to significant reductions in surface velocities.

Magnitude of the surface velocity of the 40th engine order—left: 100 Nm load, right: 350 Nm load
In the 60th engine order in Fig. 4, slight differences between variant 1 “Standard” and variant 2 “Standing” can be seen over wide engine speed ranges. In fact, variant 2 “Standing” increases the surface velocity at 2800 min−1 in both load cases. Variant 2 “Standing” also shows an increase in surface velocity for higher engine speeds from approx. 4400 min−1. Equivalent to the engine orders 20 and 40, variant 2 leads to a reduction of the excessive increase at 100 Nm and 1000 min−1.

Magnitude of the surface velocity of the 60th engine order—left: 100 Nm load, right: 350 Nm load
Identical to the engine orders 20 and 40, variant 3 “pumped out” results in the lowest surface speeds of the considered variants. The 2700 min−1 increases can also be seen in the third variant. For higher speeds from approx. 4000 min−1, the reductions due to variant 3 “pumped out” are lower than in the preceding engine orders 20 and 40.
A comparison of the results with the numerical values for the reflectance and transmittance gives a uniform picture. While only 0.003% of the energy is transferred during the transition from steel to air, it is already 9.3% of the energy during the transition from steel to oil. This means that an intermediate layer filled with a liquid allows more energy to penetrate from the inside of the system to the outside and thus emit into sound. A fluid with a lower impedance leads to better insulation of the inner structures.
4 Conclusion
This application paper presents the influence of a coolant mantle on the acoustic radiation of an electric drive machine.
In the experiments carried out, the coolant mantle was varied and pumped out so that the thin film was filled with ambient air. It was found that without the coolant the machine had the lowest surface velocities and thus the lowest acoustic radiation. As a result, a fluid-filled thin film couples the two components and has negative effects on the acoustic radiation of a machine. The results were justified and confirmed with the analogy of the mechanical impedance of the different media. A larger impedance jump in the phase transition results in less energy being transmitted from the exciter component into the excited medium. The effect of structure resonances and mode shapes on the surface velocity could not be considered in this paper and will be part of further research.
The results presented serve as a basis for further work and developments. The acoustic suitability of other fluids has to be tested, while focus is on fluids with lower longitudinal impedances. In addition, the influences of the fluid must be integrated into the structural-dynamic FEA simulations of the electrical machine.
References
Hofmann, P.: Hybridfahrzeuge: Ein alternatives Antriebssystem für die Zukunft, 2nd edn. Springer, Wien (2014)
Andreas, K.: Elektrische Maschinen und Antriebe: Grundlagen, Motoren und Anwendungen. 2, überarbeitete und ergänzte Auflage. Vieweg + Teubner Verlag, Wiesbaden (2004)
Bolte, E.: Elektrische Maschinen: Grundlagen, Magnetfelder, Erwärmung, Funktionsprinzipien, Betriebsarten, Einsatz, Entwurf, Wirtschaftlichkeit, 2nd edn. Springer Vieweg, Berlin (2018)
Busch, R.: Elektrotechnik und Elektronik: Für Maschinenbauer und Verfahrenstechniker. 7., überarbeitete. Springer Vieweg, Wiesbaden (2015)
Wolschin, G.: Elektrodynamik. Springer Spektrum, Berlin (2016)
Blum, J., Merwerth, J., Herzog, H.-G.: Investigation of the segment order in step-skewed synchronous machines on noise and vibration. In: 2014 4th International Electric Drives Production Conference (EDPC), 30 September–1 October 2014, Nuremberg, Germany
Kollmann, F.G.: Maschinenakustik: Grundlagen, Meßtechnik, Berechnung, Beeinflussung. 2., neubearbeitete. Springer, Berlin (2000)
Genuit, K.: Sound-Engineering im Automobilbereich. Springer, Berlin (2010)
Kinsler, L.E.: Fundamentals of acoustics, 4th edn. Wiley, New York (2000)
NDT Education Resource Center: UT Material Properties. https://www.nde-ed.org/EducationResources/CommunityCollege/Ultrasonics/Reference%20Information/matproperties.htm. Überprüfungsdatum 2019-03-30
Deutsche Gesellschaft für Akustik e.V.: DEGA: Akustische Wellen und Felder: DEGA-Empfehlung 101 (2006)
Wanke, A., Shahfir, M.K.N.; Owertschuk, E.; Doppelbauer, M.; Gauterin, F.: Acoustically optimized integration concept hybrid-electric drive in automotive application
Acknowledgements
The author is thankful to Paul Künstler, M.Sc. in providing support and help to realize the measurements necessary for this application paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Schnell, M., Gauterin, F. Acoustic effects of the coolant mass flow of an electric machine of a hybrid drive train. Automot. Engine Technol. 4, 189–193 (2019). https://doi.org/10.1007/s41104-019-00053-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41104-019-00053-x