
Abstract
The present paper deals with a food chain model consisting of three species phytoplankton, zooplankton and fish. We have divided the present paper into two parts. In the first part, we have assumed that the fish population is harvested using a non-linear harvesting function. Considering this rate of harvesting ‘E’ as a control parameter, we have estimated different ranges of harvesting parameter for maintaining the sustainability in the plankton ecosystem. Moreover, the bifurcation analysis of the system is carried out using normal form theorem by taking ‘E’ as bifurcation parameter. In the second part, a digestion delay corresponding to zooPlankton–fish interaction is introduced for more realistic consideration of the real world problem. Taking harvesting parameter in the stability range, the effect of time delay on the given system is investigated. This research demonstrate that for a certain range of delay, system enters into the excited state with the existence of stability switches which seems new findings for the Plankton–fish system. Explicit results are derived for stability and direction of the bifurcating periodic solution by using normal form theory and center manifold arguments. To validate our analytical findings numerical simulations are also executed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
A major concern in population ecology is to understand how a population of a given species influences the dynamics of populations of other species. The dynamic relationship between predator and their prey has long been and continue to be one of the dominant themes in mathematical ecology due to its universal existence and importance (Berryman and Millstein 1989). The pioneering work of May (1976) has established some mathematical models based on certain ecological principles to explore the complexity of the ecological system. The research of the last two decades have demonstrated that very complex dynamics can arise in three or more species food chain models (Hastings and Powell 1991; Klebanoff and Hastings 1993; Rai and Upadhyay 2004; Gakkhar and Naji 2005; Upadhyay and Chattopadhyay 2005) including quasi-periodic or chaos. A great number of theoretical studies indicates that, indeed, plankton systems are, in principle, capable to generate their own chaos. Prey-predator models (e.g., phytoplankton-zooplankton interaction) in seasonally varying environments have been proved to be chaotic (Inoue and Kamifukumoto 1984; Klebanoff and Hastings 1994; Kuznetsov and Rinaldi 1996). Chaotic behavior in tritrophic food chain interactions have been shown in Gilpin (1979), Hogeweg and Hesper (1978), Scheffer (1991). It is well established that toxin has great impact on phytoplankton-zooplankton interaction and can be used as a mechanism of controlling complexity (bloom) of the plankton ecosystem (Pal et al. 2007; Chakarborty et al. 2008; Sarkar and Chattopadhyay 2003; Mukhopadhyay and Bhattacharyya 2006; Hansen 1995; Ives 1987; Buskey and Hyatt 1995). Recently, Upadhyay and Chattopadhyay (2005), Upadhyay et al. (2007), Upadhyay and Rao (2009) have studied a series of mathematical models representing the prey(TPP)-specialist predator(Zooplankton)-generalist predator(Fish) interaction in the context of deterministic chaos in the plankton system. They have studied the role of toxin as a control parameter in stabilizing the plankton system by using different response functions for fish grazing.
Further, the introduction of strictly planktivorous fish to lakes can alter plankton communities via cascading interactions in food webs, where strong fish predation on zooplankton leads to reduction of their grazing pressure on algae. Many limnological studies have focused on this dramatic impact of fish on plankton communities (Carpenter et al. 1987; Leavitt and Findlay 1994; Pace et al. 1999). Furthermore, enhancement of piscivorous fish by stocking and catch restrictions has been attempted in several eutrophic or hypertrophic waters, and has resulted in the elimination of excess algae (Carpenter et al. 1987; Rinaldi and Solidoro 1998; Benndorf et al. 1984; McQueen et al. 1989; Lazzaro 1987). Recently, research carried by authors in Strock et al. (2013) reveals that the introduction of white perch in eutrophic lake reduces the algal pigments concentration and results high label of stability in trophic interaction due to the cascading effects of white perch. Attayde et al. (2010) in their model, also supports the idea that omnivory decreases the amplitude of limit cycles and increases the persistence in plankton dynamics.
Keeping in view the above findings, here, we have considered a tri-trophic food chain model of Plankton–fish interaction. We have assumed that the generalist predator (fish) is harvested using a nonlinear harvesting function (Feng 2014). Our major concern in this research to determine the impact of non-linear harvesting on the Plankton–fish interaction by predicting different ranges of harvesting parameter.
So far many researcher (Upadhyay et al. 2007; Upadhyay and Rao 2009, references there in) have studied that toxicated phytoplankton may be used as controller and can stabilize the Plankton–fish dynamic.
In this paper, we have introduced quadratic harvesting of the fish population and proposed different ranges of harvesting for regulating agencies so that they can utilize it for future harvesting along with the stabilization of the ecosystem.
The organization of our paper is as follows: In Sect. 2, we have developed a mathematical model followed by its properties in Sect. 2.1. The stability and bifurcation analysis of the given model system with rate of harvesting as a bifurcation parameter is presented in Sect. 3. In Sect. 4, we have assumed that there is a gestation delay in fish population and considering this time delay as a bifurcation parameter, we have discussed its possible impact on the Plankton–fish dynamic. The stability and bifurcation properties are provided in Sect. 5. The justification of our analytical findings by numerical simulation and concluding remarks are given in Sects. 6 and 6.2.
The mathematical model
Let p(t) be population density of the toxin producing phytoplankton (prey) which is predated by individuals of specialist predator zooplankton of population density z(t) and this zooplankton population, in turn, serves as a favorite food for the generalist predator (fish of mollusca) population of size f(t). This tri-trophic interaction is represented by the following system of ordinary differential equation as,
where r be the growth rate of the TPP species, \({\alpha _1}\) be the maximum ingestion rate by zooplankton population, \(c_1\) is the fraction of biomass converted to zooplankton, \({\delta _1}\), \({\delta _2}\), \({\delta _3}\) be the mortality rates of phytoplankton, zooplankton and fish population respectively. Let \({\alpha _2}\) be the rate at which fish graze on specialist predator (zooplankton) and \(c_2\) is the corresponding biomass conversion by fish predator. a, b and d are the half saturation constants. The effect of harmful phytoplankton species on zooplankton is modeled by Holling-II type response function ‘\(\frac{p}{(a+p)}\)’. It is assumed that the fish population is harvested quadratically at constant rate of harvesting E.
Stability properties of equilibria
The given model system (1) has the following equilibrium points in the closed first octant \(R^{3+}={(p, z, f): p\ge 0, z\ge 0, \quad f\ge 0}\)
-
(i)
\(R_0=(0,0,0)\), a trivial equilibrium always exist and unstable,
-
(ii)
\(R_1=(\frac{a{\delta _2}}{c_1{\alpha _1}-{\theta }-{\delta _2}}, \frac{1}{\alpha _1}(r-\delta _1p^*)(a+p^*),0)\), the boundary equilibrium exists when the conditions \((c_1{\alpha _1}-{\theta })>{\delta _2}\) and \(p^*<\frac{r}{{\delta _1}}\) are satisfied and
-
(iii)
The interior equilibrium point \(R^*=(p^*, z^*, f^*)\) of (1) exists if and only if conditions \(p^*<\frac{r}{{\delta _1}}\) and \(\frac{z^*}{d+z^*}<\frac{{\delta _3}}{c_2{\alpha _2}}\) are satisfied and is given by, \((c_1{\alpha _1}-{\theta })\frac{p^*}{a+p^*}-{\delta _2}=\frac{{\alpha _2}f^*}{b+z^*}\), \(z^*=\frac{(r-{\delta _1}p^*)(a+p^*)}{{\alpha _1}}\) and \(f^*=\frac{1}{E}(-{\delta _3}+c_2{\alpha _2}\frac{z^*}{d+z^*})\)
In this paper, our main interest is to investigate the stability of the interior equilibrium \(R^*\) for coexistence of the population.
Using the transformation, \(p=x_1+p^*\), \(z=x_2+z^*\) and \(f=x_3+f^*\), the linearization of given system (1) in the neighborhood of \(R^*\) gives the following system,
where \(a_{100}=r-2\delta _1p^*-\alpha _1\frac{a}{(a+p^*)^2}z\), \(a_{010}=-\alpha _1\frac{p_*}{(a+p^*)}\), \(a_{200}=-2\delta _1+\frac{2a\alpha _1 z^*}{(a+p^*)^3}\), \(a_{110}=-\frac{a\alpha _1}{(a+p^*)^2}\), \(a_{300}=-\frac{6a\alpha _1 z^*}{(a+p^*)^4}\), \(a_{210}=\frac{2a\alpha _1}{(a+p^*)^3}\), \(b_{100}=\frac{c_1\alpha _1az^*}{(a+p^*)^2}-\frac{\theta a z^*}{(a+p^*)^2}\), \(b_{010}=\frac{(c_1\alpha _1-\theta )p^*}{(a+p^*)}-\delta _2-\frac{b\alpha _2 f^*}{(b+z^*)^2}\), \(b_{001}=-\frac{\alpha _2z^*}{(b+z^*)}\), \(b_{200}=\frac{-2ac_1\alpha _1z^*}{(a+p^*)^3}+\frac{2a\theta z^*}{(a+p^*)^3}\), \(b_{020}=\frac{2\alpha _2bf^*}{(b+z^*)^3}\), \(b_{110}=\frac{ac_1\alpha _1}{(a+p^*)^2}-\frac{a\theta }{(a+p^*)^2}\), \(b_{011}=-\frac{b\alpha _2}{(b+z^*)^2}\), \(b_{300}=\frac{6a(c_1\alpha _1-\theta )z}{(a+p^*)^4}\), \(b_{030}=-\frac{6b\alpha _2f^*}{(b+z^*)^4}\), \(b_{210}=-\frac{2ac_1\alpha _1}{(a+p^*)^3}+\frac{2a\theta }{(a+p^*)^3}\), \(b_{021}=\frac{2b\alpha _2}{(b+z^*)^3}\), and \(c_{010}=\frac{c_2\alpha _2df^*}{(d+z^*)^2}\), \(c_{001}=-\delta _3+\frac{c_2\alpha _2z^*}{d+z^*}-2Ef^*\), \(c_{020}=\frac{-2c_2\alpha _2df^*}{(d+z^*)^3}\), \(c_{002}=-2E\), \(c_{011}=\frac{dc_2\alpha _2}{(d+z^*)^2}\), \(c_{030}=\frac{6c_2\alpha _2df^*}{(d+z^*)^4}\), \(c_{021}=\frac{-2dc_2\alpha _2}{(d+z^*)^3}\).
Rewriting the given system in the form, \(\dot{X}=MX+R\), we have
and R is the matrix containing the nonlinear terms of (2).
The characteristic equation corresponding to the matrix M is,
Where, \(B_1=-(a_{100}+b_{010}+c_{001})\), \(B_2=a_{100}(b_{010}+c_{001})+b_{010}c_{001}-a_{010}b_{100}-b_{001}c_{010}\), \(B_3=a_{010}b_{110}c_{001}-a_{100}(b_{010}c_{001}-b_{001}c_{010})\).
If \(B_1>0\), \(B_3>0\) and in addition \(B_1B_2-B_3>0\), then using Routh-herwitz criterion, system (1) will be locally asymptotically stable around \(R^*\).
Now, let us choose E, the rate of harvesting as a bifurcation parameter.
Theorem 2.1
Let \(B_2>0\). Then (3) will have a pair of purely imaginary roots provided \({\Theta }\equiv B_1B_2-B_3=0\) and system (1) will undergo a hopf-bifurcation if \([\frac{d}{dE}({\Theta })]_{E=E_0}\ne 0\) where \(E_0\) is the value of E correspond to \(\Theta =0\).
Proof
Proof is obvious and is left for the reader. \(\square\)
Analysis of bifurcating solutions
In the last section, we have chosen E as the bifurcation parameter and deduced that the system undergoes a Hopf-bifurcation as E passes through some threshold value \(E_0\). In this section we perform a detailed analysis about the bifurcating solutions (Hassard et al. 1981).
Let \(E_1=E_0-E\) and denote the matrix M as \(M(E)=F_{X}(X^*, E)\), where the given system is of the form \(\dot{X}=F(X, E)\).
Let q(E) and \(\hat{q}(E)\) be the eigenvectors of M(E) and \(M^t(E)\) respectively corresponding to simple eigenvalues \({\lambda }\) and \(\bar{{\lambda }}\). So we have \(M(E)q={\lambda }(E)q\),
For an imaginary value of \({\lambda }={\iota \sigma _0}\) and \(q=(q_1, q_2, q_3)\), we have
-
\(q_1=a_{010}b_{001}=f_1+{\iota } f_2\),
-
\(q_2=-a_{100}b_{001}+{\iota \omega _0}b_{001}=g_1+{\iota } g_2\),
-
\(q_3=a_{100}b_{001}-a_{010}b_{100}-{\omega _0^2}-{\iota \omega _0}(a_{100}+b_{001})=h_1+{\iota } h_2\),
We normalize \(\hat{q}\) relative to q, so that
where \(<.,.>\) denote the Hermitian product, \(<u,v>={\Sigma }\bar{u_{i}}v_{i}\),
Also
Let \(\hat{q}=\left( \begin{array}{c} \hat{q_1} \\ \hat{q_2} \\ \hat{q_3}\\ \end{array} \right)\),
where k is a constant. So, \(\hat{q_1}\), \(\hat{q_2}\) and \(\hat{q_3}\) can be determined by taking complex conjugates of (8). Using the notation in Hassard et al. (1981), we substitute
At bifurcation parameter \(E_1=0\), we have,
where
Now taking the dot product of \(f_0\) and \(\bar{\hat{q}}(0)\) and expanding we have,
From (9), (10), (11) and (12), we obtain
Using the notation of Hassard et al. (1981) we write
where \(g_{ij}\) are given by (13).
Theorem 3.1
From the above obtained quantities, it can be found that bifurcation is supercritical (stable) if \({\mu }_2>0\) and subcritical (unstable) if \({\mu }_2<0\).
Coexistence in the presence of digestion delay
In most of ecosystems, both natural and manmade, population of one species does not respond instantaneously to the interactions of other species. Sharma et al. (2014) mentioned that animals must take some times to digest their foods before further activities and responses. To incorporate this idea in the modeling approach, we have considered a gestation delay in the zooPlankton–fish interaction. This delay represents the time lag required for gestation of predator which is based on the assumption that the rate of change of predator depends on the number of prey and of predators present at some previous time (Sarwardi et al. 2012). Further time delays in ecological system has destabilizing effects (Sharma et al. 2014; Cushing 1977; Gopalsamy 1992; Kuang 1993; Macdonald 1989; Beretta and Kuang 2002; Das and Ray 2008; Sharma et al. 2015). So, the main aim of this section is to determined whether the dynamic of given system under investigation in stability region for some parameter values changes in the presence of digestion delay or not.
The model is governed by the following system of the nonlinear delay differential equation,
The initial condition of the system (14) take the form \(p({\theta })={\phi _1(\theta )}\), \(z({\theta )=\phi _2(\theta )}\) and \(f({\theta )=\phi _3(\theta )}\), \({\theta }\in [-\tau , 0]\), \({\phi }_i(0)\ge 0\), \({\phi }_i({\theta })\in C([-\tau , 0], R^3_{+})\).
Theorem 4.1
The system (14) remained uniformly bounded in \(\sum\), where \(\sum =[(p(t), z(t), f(t-\tau )):0\le p(t)+z(t)+f(t)\le \frac{1}{{\eta }}(\frac{r^2}{{\delta _1}}-\frac{2(1+c_2{\alpha _2})}{c_2{\alpha }_2E})]\) and \({\eta }=min(1, r, {\delta }_2-c_2{\alpha }_2)\).
Proof
From (14) for all \(t\in [0,\infty )\),
or it can be obtain that, \(\limsup _{t\rightarrow \infty } p(t)\le \frac{r}{{\delta }_1}\).
Let us consider a time dependent function,
Using (14) in above expression, we can obtain
or
Now, applying the theorem of differential inequalities (Birkhoff and Rota 1882), we obtain
As \(t\rightarrow \infty\), we have \({\displaystyle 0\le W(t)\le \frac{1}{\eta }\left( \frac{r^2}{\delta _1}-\frac{2(1+c_2\alpha _2)}{c_2\alpha _2E}\right) }\).
Hence all the solutions of the system (14) are bounded in \(\sum\).
Now, using Taylor’s expension, (14) can be reduced to the following system of differential equations,
where
The corresponding characteristic equation is,
Remark
The local asymptotical stability of the non-delayed system around \(R^*\) using Routh–hurwitz criterion is already discussed in above section and it follows that the necessary and sufficient conditions for all roots of (3) having negative real parts \((\tau =0)\) are given by \(B_2>0\) and \(B_1B_2-B_3>0\), which means that (14) is remained asymptotically stable around \(R^*\) in the absence of gestation delay.
To obtain the effect of digestion delay on the stability of equilibrium point \(R^*\), let us consider the case when \(\tau \ne 0\) and the characteristic equation can be written as
Now for \({\lambda }=0\), \({\Delta }(R^*,\tau )=B_3-B_6\ne 0\), it means that \({\lambda }=0\) is not a root of the characteristic equation (16) if the interior equilibrium point \(R^*\) exists. And the conditions for stability of \(R^*\) when \(\tau\) varies are given by the following theorem.
Theorem 4.2
If all roots of the Eq. (16) has negative real parts and,
-
(i)
When \(H({\sigma }, \tau )=0\) has no positive root, the interior equilibrium point \(R^*\) is asymptotically stable for an arbitrary delay \(\tau\).
-
(ii)
When \(H({\sigma }, \tau )=0\) has at least one positive root say \({\sigma }_0\), there exists a critical delay \(\tau _0>0\) such that the interior equilibrium point \(R^*\) is asymptotically stable for \(\tau \varepsilon (0,\tau _0)\).
-
(iii)
When \(H({\sigma }, \tau )=0\) has at least two positive roots say \({\sigma }_{\pm }\) then there exist positive integer n, such that the equilibrium \(R^*\) switches n times from stability to instability to stability and so on such that \(R^*\) is locally asymptotically stable whenever \(\tau \varepsilon [0, \tau _0^+]\cup (\tau _0^-, \tau _1^+)\cup \cdots \cup (\tau _{n-1}^-, \tau _n^+)\) and is unstable whenever \(\tau \varepsilon (\tau _0^+, \tau _0^-)\cup (\tau _1^+, \tau _1^-)\cup \cdots \cup (\tau _{n-1}^+, \tau _{n-1}^-)\).
The model system (14) undergoes a Hopf-bifurcation around \(R^*\) for every \(\tau =\tau _{k}^{\pm }\).
Where
Proof
Let \({\iota \sigma }_0 ({\sigma }_0>0)\) is a pair of purely imaginary roots of (16), then we have
Separating the real and imaginary parts, we obtain
Eliminating \(\tau\) from above equations, it can be obtained that
Setting \(z={\sigma }^2\), (21) can be written as,
where
Now from the sign of \(B_1\), \(B_2\) and \(B_3\), it can be obtained that Eq. (22) possesses two positive roots say, \({z_0}_\pm\) which implies (21) has two roots \({\sigma }_\pm =\pm \sqrt{z_0}\). Substituting this value in (19) and (20), the corresponding critical value of delay \(\tau =\tau _k^\pm\) at which \(R^*\) stability switches occurs are given by,
Let us define \({\theta }_\pm ={\displaystyle \frac{1}{\sigma _{0}^\pm }}{\displaystyle \frac{(B_{4}-B_{6}\sigma ^2)(B_2\sigma ^\pm -\sigma ^3)+B_5\sigma ^\pm (B_1\sigma ^2-B_3)}{(B_{3}-B_{1}\sigma ^2)(B_6\sigma ^2-B_4)+B_5\sigma ^\pm (B_2\sigma ^\pm -\sigma ^3)}}\), we have two sequence of delays \(\tau ^{+}_k=\frac{{\theta }_{+}+2k\pi }{{\sigma }_+}\) and \(\tau ^{-}_k=\frac{{\theta }_{-}+2k\pi }{{\sigma }_1}\) for which there are two purely imaginary roots of the (16). We will now study how the real parts of the roots of (16) vary as \(\tau\) varies in a small neighborhood of \(\tau ^+\) and \(\tau ^-\).
Let \({\lambda }=\xi +{\iota \sigma }\) be a root of (16), then substituting \({\lambda }=\xi +{\iota \sigma }\) in (18) and separating real and imaginary parts we have,
and J=\(\left( \begin{array}{cc} \frac{\partial G_1}{\partial \xi } &{} \frac{\partial G_1}{\partial {\sigma }} \\ \frac{\partial G_2}{\partial \xi } &{} \frac{\partial G_2}{\partial {\sigma }} \\ \end{array} \right)\).
Thus, we have, \(G_1(0,{\sigma }_\pm ,\tau ^\pm )=G_2(0,{\sigma }_\pm ,\tau ^\pm )=0\) and \(|J|_{(0,{\sigma }_\pm ,\tau ^\pm )}>0\). Hence by the implicit function theorem \(G_1(\xi ,{\sigma },\tau )=G_2(\xi ,{\sigma },\tau )=0\).
Define \(\xi\), \({\sigma }\) as a function of \(\tau\) in a neighborhood of \((0,{\sigma }_\pm ,\tau ^\pm )\) such that \(\xi _+(\tau ^+_k)=0\), \({\sigma }_+(\tau ^+_k)={\sigma }_+\), \(|\frac{d\xi _+}{d\tau }|_{\tau =\tau ^+_k}>0\) and \(\xi _-(\tau ^-_k)=0\), \({\sigma }_-(\tau ^-_k)={\sigma }_-\), \(|\frac{d\xi _-}{d\tau }|_{\tau =\tau ^-_k}<0\).
This completes the proof of theorem. \(\square\)
Stability of bifurcating periodic solution
In this section we are employing the explicit formulae suggested by Hassard et al. Hassard et al. (1981) to determine the direction, stability and the period of the periodic solutions bifurcating from interior equilibrium \(R_*\). Following the procedure of the computation in Hassard et al. (1981), we compute (see Appendix A for details of the computation)
where the first four coefficients that we need for determining properties of the Hopf bifurcation are of the form
Where the terms \(\bar{d_1}\), \({\delta }_{11}\), \({\delta }_{12}\), \({\delta }_{13}\), \({\delta }_{14}\), \({\delta }_{21}\), \({\delta }_{22}\), \({\delta }_{23}\), \({\delta }_{24}\), \({\delta }_{31}\), \({\delta }_{32}\), \({\delta }_{33}\) and \({\delta }_{34}\) are calculated in Appendix A.
Thus, we can compute the following values:
Theorem 5.1
\({\mu }_2\) determines the direction of the Hopf bifurcation: if \({\mu }_2> ({\mu }_2<0)\) , then the Hopf bifurcation is supercritical (subcritical) and the bifurcating periodic solutions exist for \(\tau _2>\tau _{2_{0}} (\tau _2<\tau _{2_{0}})\) ; \({\beta }_2\) determines the stability of bifurcating periodic solutions: the bifurcating periodic solutions are orbitally asymptotically stable (unstable) if \({\beta }_2<0 ({\beta }_2>0)\) ; and \(T_2\) determines the period of the bifurcating periodic solutions: the period increases (decreases) if \(T_2>0 (T_2<0).\)
Numerical simulation
In this section, we give the numerical validation of some of our results obtained analytically in above sections. For this consider a numerical example to the model system (1),

System exhibits chaotic oscillation around \(R^*\) at E \(=0.0001\)

Change in stability from chaos to limit cycle at E \(=0.01\)

Change in stability from limit cycle to a stable focus at E \(=0.09\)

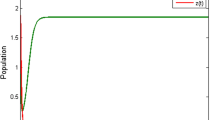
Time series graph shows the converges of solution trajectories to \(R^*\) at \(E=0.1\)

Limit cycles oscillations of solution curves around \(R^*\) at E \(=0.15\) and E \(=1.0\)

Time series graph shows that phytoplankton-zooplankton coexist but fish population almost dies out at E \(=30\)
Impact of nonlinear harvesting
The primary interest here is to find the impact of quadratic harvesting of the fish population on the stability of the given Plankton–fish system. We obtain numerically that when fish population is harvested at low rate (E\(=0.0001\)), given system (1) exhibits chaotic dynamic with initial data \(p(0)=10\), \(z(0)=5\) and \(f(0)=3\) as shown in Fig. 1. When, we further increase the value of harvesting parameter E from 0.0001 to 0.09, Figs. 2 and 3 and 4 depicts that stability exchange takes place by changing the state of the system from chaos to limit cycle and finally to stable focus. In ecological sense, it means that when the fish population is maintained between \(E\in (0.0001,0.1)\), it has stabilizing effect on the phytoplankton (TPP)-zooPlankton–fish dynamic which is well agreed with the experiment findings of Carpenter et al. (1987), Leavitt and Findlay (1994), Pace et al. (1999), Strock et al. (2013), Attayde et al. (2010). Figure 5 depicts the existence of limit cycles around \(R^*\) at \(E=0.15\) and \(E=1.0\) and ecologically it implies the prevalence of bloom like situations in plankton ecosystem. These results indicate that the enhancement in harvesting of fish population induces instability in the plankton system. Moreover, in case of excessive harvesting, the entire fish population will be elimination and phytoplankton-zooplankton population coexist with the existence of limit cycles as depicted in Fig. 6. The numerical results predicts some estimation of the harvesting parameter that will be helpful for regulating agencies to formulate some harvesting policies of fisheries for coexistence of population in ecology. The equilibrium level of all population at different harvesting rates along with nature of stability around \(R^*\) is given in Table 1.
It is already well established that toxin has stabilizing effect on the tri-trophic interaction system (Upadhyay and Chattopadhyay 2005; Upadhyay et al. 2007; Upadhyay and Rao 2009). But, in this research, we have shown that toxin is not the only mechanism of inducing stability in the Plankton–fish system rather harvesting the generalist predator (fish) at appropriate level of harvesting can induce stability and trigger new mechanism of controlling complexity such as chaos in plankton system. Thus, our findings show that fish may have stabilizing effects if it can be harvested in the proposed harvesting range.
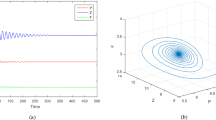
Delay induced instability
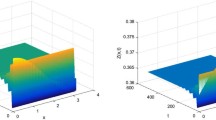
In the second part of this paper, we have considered the digestion delay in zooPlankton–fish interaction. We consider the given system in stable state by taking \(E=0.09\) and keeping other parameters unchanged. From the sign of \(p = 3.4729\), \(q = -3.2571\) and \(r =0.0808\), Eq. (22) has two purely imaginary roots \({\iota }{{\sigma }_{0}}_{\pm }\) with \({\sigma }_{+}=0.1612\) and \({\sigma }_{-}=0.0356\). Now from (23) the critical values of parameter delay at which stability exchange take place are given by \(\tau ^{+}_0=1.013\) and \(\tau ^{-}_0=49.981\) such that \(R^*\) remain stable for \(\tau \in [0, 1.0)\) (see Fig. 7) and is unstable when \(\tau \in (1,49.981)\). Thus numerical simulation shows that the interior equilibrium converges in the range \(0<\tau <\tau ^{+}_0\) and it loses stability when \(\tau\) passes through its critical value \(\tau _0\) and a Hopf bifurcation occur which is depicted in Fig. 8. When the parameter \(\tau\) varies further from critical value \(\tau _0\), it is observed that periodic oscillation appeared around \(E^*\) till \(\tau\) lies in the range \(\tau ^+_0<\tau <\tau ^{-}_0\) (see Fig. 9) and regains its stability for \(\tau >\tau ^{-}_0\) (see Figs. 10, 11). The equilibrium point \(R^*\) remains locally asymptotically stable whenever the delay parameter lies in the range \(\tau ^-_0<\tau <\tau ^{+}_1\) implies \(R^*\) again switches from stability to instability as \(\tau\) passes through \(\tau =\tau ^{+}_1\). Thus it is seen that a finite number of stability switches for the given system occurs when delay varies continuously. Thus it can be seen that there exist intervals of stability and instability as delay parameter varies through its critical value. Ecologically, it signifies the appearance and disappearance of blooms in plankton ecosystem.
Finally the stability determining quantities for Hopf-bifurcating periodic solutions at \(\tau =\tau _0\) are given by \(c_1(0) = 1.6307e+009 -6.7954e+009i\), \({\mu }_2 = -1.5409e+011\), \({\beta }_2 =3.2614e+009\), \(T_2 =-3.7051e+009\).
Hence, we conclude that the Hopf-bifurcation is subcritical in nature as well as the bifurcating periodic orbits are unstable and decreases as delay increases further through its critical value ‘\(\tau =\tau _0\)’.

Stability of interior equilibrium \(R^*\) at \(\tau =0.1\)

Hopf bifurcation in the form of limit cycle oscillation at \(\tau =1.0\)

Limit cycle at \(\tau =40\).

Switch of stability from limit cycle to stable focus around \(\tau =50\)

Another switch of stability from stable focus to limit cycle in the interval \(\tau =60\) to \(\tau =80\)
Discussion and conclusion
The consequences of toxin liberation by phytoplankton are of great interest due to its possible detrimental effect on fisheries. The role of top predator on the stability of tri-trophic food chain has been remained an interesting area of research. In this paper the Plankton–fish interaction were studied in the context of obtaining the impact of quadratic harvesting and time delay. We have assumed that the top predator in the tri-trophic food chain is harvested through non linear (quadratic) harvesting. We have analyzed the given system with various ranges of harvesting parameter keeping other parametric values fixed. It is found numerically that the chaotic oscillation has occurred in the range \(0.0001\le E<0.009\) and when values of E is taken in \(0.009\le E\le 0.01\), these oscillations disappeared with the existence of limit cycle. Again, for \(0.09\le E\le 0.1\), the system converges to a stable focus from limit cycle which shows that the harvesting of fish population induces the stability in the plankton food chain and hence stimulate a possible mechanism for controlling blooms in plankton ecosystem. Our findings has shown that introduction of nonlinear harvesting of fish population in Plankton–fish interaction can be utilized as a controlling agent.
In the second part of the model system we have assumed that the interaction of species in real life are not instantaneous rather it is delayed by time known as time delay. In this paper we have assumed that the zooPlankton–fish interaction are delayed by some time lag known as digestion delay. The main interest of this part is to observe the effect of this delay on the stability of the given system brought by stocking of the fish population. It is found that the given system remained asymptotically stable for delay in the range \(0\le \tau \le \tau _o\) (see Fig. 3). When delay ‘\(\tau\)’ passes through its critical value ‘\(\tau _0\)’ it is obtained that a phenomenon of switching of stability arises i.e. there exist a sequence of two time delays \(\tau ^+_0\) \((k=0,1,2,\ldots )\) and \(\tau ^-_0\) \((k=0,1,2,\ldots )\) under certain parametric restrictions for which the interior equilibrium point \(E^*\) is stable whenever \(\tau \in [0,\tau ^{+}_0)\cup (\tau ^{-}_0,\tau ^{+}_1)\cup \cdots \cup (\tau ^{-}_{m-1},\tau ^{+}_{m})\), and unstable when \(\tau \in [\tau ^{+}_{0},\tau ^{-}_{0})\cup (\tau ^{+}_{1},\tau ^{-}_{1})\cup \cdots \cup (\tau ^{+}_{m-1},\tau ^{-}_{m-1})\cup (\tau ^{+}_m,\infty )\). The above switching behavior of the system is shown in numerical simulation performed in the above section and it seems to be new findings in delayed Plankton–fish interactions. Thus it can be concluded that digestion delay has destabilizing effect on the TPP-zooPlankton–fish interaction. Finally it can be predicted that induction of stability by harvesting of top predator in plankton food chain can be destabilized by digestion delay.
References
Attayde JL, Van Nes EH, Araujo AIL, Corso G, Scheffer M (2010) Omnivory by planktivores stabilizes plankton dynamics, but May either promote or reduce algal biomass. Ecosystem 13(3):410–420
Benndorf J, Kneschke H, Kossatz K, Penz E (1984) Manipulation of the pelagical food web by stocking with predaceous fishes. Int Revue Ges Hydrobiol 69:407–428
Beretta E, Kuang Y (2002) Geometric stability switch criteria in delay differential systems with delay dependant parameters. SIAM J Math Anal 33:1144–65
Berryman AA, Millstein JA (1989) Are ecological systems chaotic and if not, why not? Trends Ecol Evol 4:26–28
Birkhoff G, Rota GS (1882) Ordinary differential equations. Ginn, Boston
Buskey E, Hyatt C (1995) Effects of Texas (USA) brown tide alga on planktonic grazers. Mar Ecol Prog Ser 126:285–292
Carpenter SR, Kitchell JR, Hodgson J, Cochran P, Elser J, Elser M, Lodge DM, Kretchmer D, He X (1987) Regulation of lake primary productivity by food web structure. Ecology 68:1863–1876
Chakarborty S, Roy S, Chattopadhyay J (2008) Nutrient-limiting toxin producing and the dynamics of two phytoplankton in culture media: A mathematical model. J. Ecol Model 213(2):191–201
Cushing JM (1977) Integrodifferential equations and delay models in population dynamics. Springer, Heidelberg
Das K, Ray S (2008) Effect of delay on nutrient cycling in phytoplankton–zooplankton interactions in estuarine system. Ecol Model 215:69–76
Feng P (2014) Analysis of a delayed predator-prey model with ratio-dependent functional response and quadratic harvesting. J Appl Math Comput 44:251–262
Gakkhar S, Naji RK (2005) Order and chaos in a food web consisting of a predator and two independent preys. Commun Nonlin Sci Numer Simul 10:105–20
Gilpin ME (1979) Spiral chaos in a predator-prey model. Am Nat 113:306–308
Gopalsamy K (1992) Stability and oscillations in delayDifferential equations of population dynamics. Springer, New York
Hansen F (1995) Trophic interaction between zooplankton and Paeocystis cf. Globosa. Helgolander Meeresunters 49:283–293
Hassard BD, Kazarinoff ND, Wan YH (1981) Theory and applications of Hopf bifurcation. Cambridge University Press, Cambridge
Hastings A, Powell T (1991) Chaos in three species food-chains. Ecology 72:896–903
Hogeweg P, Hesper B (1978) Interactive instruction on population interaction. Comput Biol Med 8:319–327
Inoue M, Kamifukumoto H (1984) Scenarios leading to chaos in forced Lotka–Volterra model. Progr Theor Phys 71:930–937
Ives J (1987) Possible mechanism underlying copepod grazing responses to levels of toxicity in red tide dinoflagellates. J Exp Mar Biol Ecol 112:131–145
Klebanoff A, Hastings A (1993) Chaos in three species food-chains. J Math Biol 32:427–451
Klebanoff A, Hastings A (1994) Chaos in three-species food chains. J Math Biol 32:427–451
Kuang Y (1993) Delay differential equations with applications in population dynamics. Academic Press, New York
Kuznetsov YA, Rinaldi S (1996) Remarks on food chaindynamics. Math Biosci 134:133–144
Lazzaro X (1987) A review of planktivorous fishes: their evolution, feeding behaviours, selectivities, and impacts. Hydrobiologia 146:97–167
Leavitt PR, Findlay DL (1994) Comparison of fossil pigments with 20 years of phytoplankton data from eutrophic Lake 227. Experimental Lakes Area. Ontario. Can J Fish Aquat Sci 51:2286–2299
Macdonald N (1989) Biological delay systems: linear stability theory. Cambridge University Press, Cambridge
May RM (1976) Simple mathematical models with very complicated dynamics. Nature 261(5560):459–467
McQueen DJ, Johannes MRS, Post JR, Stewart TJ, Lean DRS (1989) Bottom-up and top-down impacts on freshwater pelagic community structure. Ecol Monogr 59:289–309
Mukhopadhyay B, Bhattacharyya R (2006) Modelling phytoplankton allelopathy in a nutrient–plankton model with spatial heterogeneity. Ecol Model 198:163–173
Pace ML, Cole JJ, Carpenter SR, Kitchell JF (1999) Trophic cascades revealed in diverse ecosystems. Trends Ecol Evol 14:483–488
Pal S, Chatterjee S, Chattopadhyay J (2007) Role of toxin and nutrient for the occurrence and termination of plankton bloom-results drawn from field observations and a mathematical model. J Biosystem 90:87–100
Rai V, Upadhyay RK (2004) Chaotic population dynamics and biology of the top pradator. Chaos Solitons Fractals 21:1195–1204
Rinaldi S, Solidoro C (1998) Chaos and peak-to-peak dynamics in a plankton–fish model. Theor Popul Biol 54:62–77
Sarkar RR, Chattopadhyay J (2003) Occurence of planktonic blooms under environmental fluctuations and its possible control mechanism-mathematical models and experimental observations. J Theor Biol 224:501–516
Sarwardi S, Haque M, Mandal PK (2012) Ratio-dependent predator-prey model of interacting population with delay effect. Nonlinear Dyn 69:817–836
Scheffer M (1991) Should we expect strange attractors behind plankton dynamics and if so, should we bother? J Plankton Res 13:1291–1305
Sharma A, Sharma AK, Agnihotri K (2014) The dynamic of plankton–nutrient interaction with discrete delay. Appl. Math. Comput. 231:503–515
Sharma A, Sharma AK, Agnihotri K (2015) Analysis of a toxin producing phytoplankton–zooplankton interaction with holling IV type scheme and time delay. Nonlinear Dyn Int J Nonlinear Dyn Chaos Eng 81(1):13–25
Strock KE, Saros JE, Simon KS, McGowan S, Kinnison MT (2013) Cascading effects of generalist fish introduction in oligotrophic lakes. Hydrobiologia 711:99–113
Upadhyay RK, Chattopadhyay J (2005) Chaos to order: role of toxin producing phytoplankton in aquatic systems. Nonlin Anal Model Control 10:383–96
Upadhyay RK, Naji RK, Kumari N (2007) Dynamical complexity in some ecological models: effect of toxin production by phytoplankton. Nonlinear Anal Model Control 12(1):123–138
Upadhyay RK, Rao V (2009) Short-term recurrent chaos and role of toxin producing phytoplankton (TPP) on chaotic dynamics in aquatic systems. Chaos Solitons Fractals 39:1550–1564
Author information
Authors and Affiliations
Corresponding author
Appendix A
Appendix A
Let \(\tau =\tau _{k}+{\mu }\) , \(\bar{u}_{i}(t)=u_{i}(\tau t)\) and \(u_{t}({\theta })=u(t+{\theta })\) for \({\theta }\in [-1,0]\) and dropping the bars for simplification of notations, system (15) becomes a functional differential equation in \(C=C([-1,0],\mathfrak {R}^3)\) as
where \(u(t)=(u_1(t),u_2(t))^{T}\in \mathfrak {R}^{2}\) and \(L_{{\mu }}:C\rightarrow \mathfrak {R}^{3},\quad f:\mathfrak {R}\times C\rightarrow \mathfrak {R}^{2}\) are given, respectively, by
and
By Riesz representation theorem, there exists a function \({\phi }({\theta },{\mu })\) of bounded variation for \({\theta }\in [-1,0]\) such that
In fact, we can choose
where \({\delta }\) denote the Dirac delta function.
For \({\phi }\in C([-1,0],\mathfrak {R}^3)\), define
and
Then system (26) is equivalent to
For \({\psi }\in C^{1}([0,1],(\mathfrak {R}^{3})^*)\), define
and a bilinear inner product
where \(\varsigma (\theta )=\varsigma (\theta ,0)\). Then A(0) and \(A^{*}\) are adjoint operators. From the results of last section, we know that \(\pm {\iota \sigma }_{0}\tau _{k}\) are the eigenvalues of A(0) and \({\mp }\iota \sigma _{0}\tau _{k}\) are the eigenvalues of \(A^*\).
Let \(q(\theta )=(1,{\alpha }, {\beta })^Te^{{\iota \sigma }_{0}\tau _{k}\theta }\) be the eigenvector of A(0) corresponding to the eigenvalue \({\iota \omega }_{0}\tau _k\) and \(q^{*}(s)=D(1,{\alpha }', {\beta }')e^{{\iota \sigma }_{0}\tau _{k}s}\) be the eigenvector of \(A^{*}\) corresponding to the eigenvalue \(-{\iota \sigma }_{0}\tau _k\), then
It follow from the definition of A(0), \(L_{{\mu }}(\phi )\) and \({\eta }(\theta , {\mu })\) that
where I is identity matrix of order 2, that is,
Solving the above equations, we get
From the definition of \(A^*\), we obtain
Since \(q(\theta )\) is the eigenvector of \(A^*\) corresponding to -\({\iota \sigma _0\tau _k}\), then we have
or
where I is identity matrix of order 2, that is,
Solving the above equations, we get
Now,
In order to have \((q^*, q)=1\), we can choose \(d_1={\displaystyle \frac{1}{1+\bar{{\alpha }}{\alpha }'+\bar{{\beta }}{\beta }'+{\beta '\tau }_{k}e^{{\iota \omega }_{0}\tau _{k}}(\bar{{\alpha }}c'_{010}+\bar{{\beta }}c'_{001})}}\),
such that \((\psi , A\phi )=(A^*\psi , \phi )\).
or \(-{\iota \sigma }_0(q^*, \bar{q})=(q^*, A\bar{q})=(A^*q^*, \bar{q})=(-{\iota \sigma }_0q^*, \bar{q})={\iota \sigma }_0(q^*, \bar{q})\)
i.e. \((q^*, \bar{q})=0\).
Next we will compute the coordinates to describe the center manifold \(C_{0}\) at \({\mu }=0\). Let \(u_{t}\) be the solution of (31) when \({\mu }=0\).
Define
On the center manifold \(C_{0}\), we have, \(W(t,\theta )=W(z(t),\bar{z}(t),\theta )\),
where
z and \(\bar{z}\) are local coordinates for center manifold \(C_{0}\) in the direction of q and \(q^*\) respectively. Here we consider only real solutions as W is real if \(u_{t}\) is real. For the solution \(u_{t}\in C_{0}\) of (31), since \({\mu }=0\), we have
This equation can be rewritten as
where
Now from (28) and (35), it follows that
Or
where
Comparing its coefficients with (35), we find
Since, \(W_{20}\) and \(W_{11}\) are in \(g_{21}\), we still to compute them.
Now from (31) and (33), we have
where
Substituting (40) into (39) and comparing the coefficients, we get
From (39) and for \(\theta \in [-1,0)\)
Using (35) in (42) and comparing coefficients with (40), we can obtain
and
From the definition of A(0), (41) and (43), we obtain
Solving it and for \(q(\theta )=(1,q_1,q_2)^Te^{{\iota \sigma _0\tau }_k\theta }\), we have
Similarly, from (41) and (44) it follows that,
where \(E_{1}=({E_{1}}^{(1)},{E_{1}}^{(2)})^{T}\) and \(E_{2}=({E_{2}}^{(1)},{E_{2}}^{(2)})^{T}\) are three dimensional constant vectors, and can be determined by setting \(\theta =0\) in \(H(z,\bar{z},\theta )\).
Again from the definition of A(0) and (41), we have
and
where \(\varsigma (\theta )=\varsigma (0,\theta )\).
From (39), we know when \(\theta =0\),
That is,
From (33), we have
Thus we can obtain,
Comparing the coefficients in (49) and using (50), we get
Since \(\iota \sigma _{0}\tau _{k}\) is the eigenvalue of A(0) corresponding to eigenvector q(0), then
Substituting (45) and (51) into (47), we find
or
or
Similarly, substituting (46) and (52) into (48), we obtain
or
Finally, we can compute the following quantities:
Rights and permissions
About this article

Cite this article
Sharma, A., Sharma, A.K. & Agnihotri, K. Complex dynamic of plankton–fish interaction with quadratic harvesting and time delay. Model. Earth Syst. Environ. 2, 1–17 (2016). https://doi.org/10.1007/s40808-016-0248-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40808-016-0248-x