
Abstract
This article considers a fractional-order neuron model under an electromagnetic field in terms of generalized Caputo fractional derivatives. The motivation for incorporating fractional derivatives in the previously proposed integer-order neuron model is that the fractional-order model impresses with efficient effects of the memory, and parameters with fractional orders can increase the model performance by amplifying a degree of freedom. The results on the uniqueness of the solution for the proposed neuron model are established using well-known theorems. The given model is numerically solved by using a generalized version of the Euler method with stability and error analysis. Several graphical simulations are performed to capture the variations in the membrane potential considering no electromagnetic field effects, various frequency brands of external forcing current, and the amplitude and frequency of the external magnetic radiation. The impacts of fractional-order cases are clearly justified.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Heinrich Wilhelm Gottfried von Waldeyer-Hartz, a German scientist, is credited with coining the term “neuron” in 1891. Neurons are nerve cells that send and receive messages from the brain. The neuron is made up of a cell body, or soma, with branching dendrites that act as signal receivers and an axon that carries nerve signals. The axon terminals send the electrochemical signal across a synapse at the opposite end of the axon (the space between the axon terminal and the receiving cell).
Neuron dynamics have been described using a variety of models. A set of first-order ordinary differential equations has been used to describe the dynamic behavior that a neuron model exhibits. The Hodgkin–Huxley (HH) model [1], which takes into account the ionic process and current on the surface of the cell membrane, is the most well-known dynamical model of the biological neuron. It represents the behavior of the membrane action potential of the giant squid axon. The authors of [2] proposed the Leaky Integrate and Fire neuron (LIF), which is generally used in experiments on large networks. In [3], a silicon hardware implementation of neurons considered in neuromorphic circuits was explored. The accuracy of the LIF neuron was not good because of its unrealistic simplicity, so it did not match with experimental outputs. In ref. [4], an optimized realization of the Morris-Lecar neuromorphic model was introduced. In ref. [5], the Hindmarsh–Rose neuron model was considered to take memristors to imitate the connection between the magnetic flux and membrane potential of the electromagnetic field. Several neuron models [6,7,8] have been introduced to analyze the electrical behaviors of neuron and the outcomes are used to produce similar phases and modes such as spiking, quiescent, bursting, and even chaotic states.
Fractional calculus, one of the most useful areas of research in applied mathematics, contains various types of differential and integral operators [9,10,11,12]. Fractional-order operators have been successfully implemented to describe a number of real-world problems. The authors in [13] introduced a fractional mathematical model for the huanglongbing transmission within a citrus tree. In [14], a study on the structure of the alkali-silica chemical reaction model using the Caputo fractional derivatives has been proposed. A Caputo-type corneal shape mathematical model with novel observations has been given in [15]. In [16], the optimal controls on the transmission of the bovine schistosomiasis epidemic model have been derived using fractional derivatives. The authors in [17] have introduced a fractal-fractional model of the AH1N1/09 virus. In [18], some novel analyses of a non-autonomous cardiac conduction model have been performed. In [19], the dynamics of a linear triatomic molecule have been defined using fractional derivatives.
The fractional derivatives have been implemented to analyze the models of neuron. In [20], the authors have proposed a fractional model with synchronization of electrically coupled neuron systems. In [21], a fractional leaky integrate and fire model has been given, considering neuronal spike timing adaptation. In [22], the fractional Izhikevich and Fitzhugh–Nagumo neuron modeling was introduced. In [23], the spiking and bursting behaviors of the fractional Izhikevich model were discussed. In [24], the authors have discussed low-voltage low-power integrable CMOS circuit application of integer- and fractional-order Fitzhugh–Nagumo neuron model. In [25], the structure of a neuron considering integer- and fractional-order discontinuous external magnetic flux has been given. In [26], a study on the fractional Izhikevich neuron model with synchronization and FPGA realization has been given. In [27], the authors proposed the synchronization of the fractional neuron model considering noise. In [28], an FPGA realization of a fractional-order neuron was discussed. In [29], the chimera state in the network of fractional Fitzhugh–Nagumo neurons has been investigated. In [30], a survey on the dynamics and implementation methods of fractional neuron models has been given. In [31], some novel analyses of the numerical approximations of fractional spiking neuron models have been given. In [32], a fractional-order Fitzhugh–Nagumo neuron model has been analyzed.
In this study, we propose a fractional-order neuron model, revising the previously published integer-order model [33] using the following generalized Caputo fractional derivative:
Definition 1
[34] The generalized Caputo-type fractional derivative, \(D^{\gamma , \rho }_{d_+},\) of order \(\gamma >0\) is defined by
where \( \rho > 0, d \ge 0,~ and~ n- 1< \gamma \le n.\)
We apply fractional derivatives because the fractional-order model contains memory in the system, and the parameters with fractional order can enrich the model performance, providing one degree of freedom. The paper is organized in the following sections: In Sect. 2, the description of the proposed fractional-order model is given with the results of the existence of a unique solution. In Sect. 3, the numerical solution of the proposed model is derived using a modified version of the Euler method along with the stability and error estimation of the scheme. In Sect. 4, the graphical simulations are given. In Sect. 5, the results are concluded.

Parameter values: \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 0.06, \lambda _H= 0.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 0.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
2 Model description
The proposed revised form of an integer-order neuron model [33] using the generalized Caputo fractional derivative is given by
where \(I_{ext}= I_1 \sin (\pi f_1 t) + I_2 \cos (\pi f_2 t)\) defines external forcing current with different frequencies \(f_1, f_2\) and currents \(I_1, I_2\). \(^C_0D_t^{\gamma , \rho }\) denotes the generalized Caputo derivative with order \(\gamma \) along with extra parameter \(\rho \). Moreover v, i, q, and w define the voltage, current, charge, and magnetic flux in the case of dimensionless parameters, respectively. \(\lambda _H\) and \(\lambda _E\) are the switching factors of the magnetic and electric field. Other parameters are \(k_1, k_2, k_3, k_4\) and \(\alpha , \beta , a, b\) are described briefly in ref. [33]. The reason for showing an interest in the given model is the proposed model contains multiple factors, namely, electromagnetic field effects, various frequency brands of external forcing current, and the amplitude and frequency of the external magnetic radiation, to capture the variations in the membrane potential. Also, incorporating an extra parameter \(\rho \) along with fractional-order \(\gamma \) adding one more degree of freedom, makes the proposed methodology advanced to the general Caputo case.

Parameter values: \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 6.66, \lambda _H= 0.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 0.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
For further investigations, let us define
and
Then, the proposed model (2) can be expressed in terms of the following initial value problem (IVP) for the given function u(t) with singular kernel x(t, u) on the time interval [0, T]:
The related Volterra integral equation (VIE) of the IVP (5a)–(5b) is given by [34]
Firstly, we recall the results regarding the existence of unique solution for the above given IVP (5a) and (5b) using following theorems.
Theorem 1
(Existence) [35]. For \( 0< \gamma \le 1,~ u_0 \in \mathbb {R},~ T^*> 0,~ J> 0,\) consider the set \( \zeta := \{(t, u):~ t \in [0, T^*],~ | u- u_0 | \le J\}\) and define the continuous function \(x: \zeta \rightarrow \mathbb {R}\). Let \(M:= \sup _{(t, u)\in \zeta } |x(t, u)|\) and
Then, a function \( u\in \mathcal {C}[0, T]\) exists and it satisfies the IVP (5a) and (5b).
Theorem 2
(Uniqueness) [35]. Let \(u(0)\in \mathbb {R},~ J> 0,~ T^* > 0,\) and the set \(\zeta \) given in Theorem 1. Consider the continuous function \(x: \zeta \rightarrow \mathbb {R}\) satisfying the Lipschitz condition for variable u, i.e.,
where \(V > 0\) is a constant independent to \(t, u_1,~ and ~u_2.\) Then a unique solution \( u\in \mathcal {C}[0, T]\) for the IVP (5a) and (5b) exists.
Theorem 3
The solution of model (2) is uniformly stable on [0, T] for some \(T>0.\)
Proof
On the contrary, we assume that there exists two solutions u(t) and v(t) of model (2) with initial conditions u(0) and v(0), such that
It follows that
where \(h= \sup _{t} t^\rho \). We choose \(\Vert x-y\Vert <\frac{\rho ^{\gamma }\Gamma (\gamma +1)}{h^\gamma }\epsilon .\) Then from (10), we conclude that
This implies that the solution of model (2) is uniformly stable on [0, T]. \(\square \)
3 Numerical solution using generalized Euler method
Several numerical methods have been derived to solve fractional-order systems in the last few years. In [36], a finite-difference predictor–corrector scheme was introduced for fractional differential equations. In [37], the authors have derived a short and efficient method to solve generalized Caputo-type differential equations. In [38], a modified predictor–corrector method has been introduced to solve generalized Caputo-type differential equations with delay. In [39], the authors have derived the generalized differential transform method to simulate impulsive fractional differential equations. In [40], the authors proposed a generalized Lucas polynomial sequence approach for fractional differential equations. In [41], a novel operation matrix scheme for solving generalized Caputo-type fractal–fractional differential equations has been derived. The author in [42] proposed an orthonormal ultraspherical operational matrix algorithm for generalized Caputo-type fractal–fractional Riccati equation.

Parameter values: \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 0.06, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)

Parameter values: \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 6.66, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
In this section, we use the generalized Euler method given in [43] and using a non-uniform grid, to numerically solve the proposed IVP (5a) and (5b) (or model (2)). The time range [a, T] is taken as a discrete set of points
where \(h = \dfrac{T^\rho - t_0^\rho }{N}\). The solution is derived as approximations using a sequence \(u_{j},~ j = 0, 1,\ldots ,N,\) such that \(u_{k} \approx u(t_k) (k = 1, 2,\ldots , j).\) The following Volterra integral equation can represent the exact solution of the given IVP:
As a consequences, we can write
Taking \(z = s^\rho \), we get
In each of the subintervals, using composite rectangle rule, we define the approximation
The above approximation (15) gives the following explicit formula
where
Therefore, the algorithm of the numerical solution of the proposed system (2) is derived as follows:

Parameter values: \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 0.006, \lambda _H= 1.0, \alpha = 0.01, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.02, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
3.1 Stability analysis
Lemma 1
[44] If \(0< \beta < 1\) and b is a nonnegative integer, then there exist two positive quantities \(\mathcal {C}_{\beta , 1}\) and \(\mathcal {C}_{\beta , 2}\) which depend on \(\beta ,\) such that
and
Lemma 2
[44] Let \(d_{p, s} = (s - p )^{\beta - 1} (p = 1, 2,\ldots , s - 1)\) and \( d_{p, s}= 0\) for \(p \ge s, rh\le T, \beta , h, M, T> 0\) and r is a positive integer. Also, let \(\sum _{p= r}^{p= s}d_{p, s}|e_p|= 0\) for \(b> s \ge 1.\) If
then
where \(\mathcal {C}\) is a positive constant independent to h and r.
Theorem 4
Let the kernel x(t, u) satisfy the Lipschitz condition and \( u_{m}~ (m = 1,\ldots , k + 1)\) be the solution of Eqn. (16). Then, the proposed numerical method is conditionally stable.
Proof
Let \(\tilde{u_{0}},\) and \(\tilde{u_{m}}~(m= 0,\ldots , k+1)\) are the perturbations of \( u_{0},\) and \(u_{m}\), simultaneously. Then, the following approximation expression is obtained from Eq. (16)
where \( b_{k, j+1}= [{(j+1- k)}^{\gamma }-{(j- k)}^\gamma ].\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
Combining Eqs. (16) and (19), we obtain
From the triangle inequality and Lipschitz condition, we have
where \(\zeta _0= \max _{0\le k\le N}\{|\tilde{u_{0}}|+ \dfrac{\rho ^{-\gamma }h^\gamma m_1 b_{k,0}}{\Gamma (\gamma +2)}|\tilde{u_{0}}|\}\). Here, \(C_{\gamma }\) is a positive constant dependent to \(\gamma \) (Lemma 1) and h is possibly small. From Lemma 2, we get \( |\tilde{u}_{{k+1}}|\le \mathcal {C} \zeta _0,\) where \(\mathcal {C}\) is a positive constant independent to k and h. This gives the required result. \(\square \)
3.2 Error analysis

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.8, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
Lemma 3
[43] Let u(t) be the solution of (12), and x(t, u) be continuous and satisfies the Lipschitz condition with respect to u for a sufficiently small h. Then, we have
Theorem 5
For the proposed scheme (16), we have
where C is a positive constant independent to h and k.
Proof
Let \(u(t_0)= u_0,\) and \(e_k= u(t_k)-u_k.\) Using the Volterra Eq. (6) and applying Eq. (16), we define the error expression as follows:
Therefore,
where we used Lemmas 3, 1, and the Lipschitz property. Using Lemma 2, we get the required results. \(\square \)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 1.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\)
4 Graphical simulations
Now we derive the numerical solution of the model (2) using the above-mentioned generalized Euler algorithm (18). The step size is fixed as \(h=0.01\) and extra parameter \(\rho = 0.98\), which generates a non-uniform grid Eq. (11). The initial values are fixed as \((v_0, i_0, q_0, w_0) = (0.2, 0.01, 0.2, 0.01)\). We fix the parameters \(k_1 = 1.0, k_2 = 1.0, k_3 = 1.0, k_4 = 0.01.\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 0.1, B_1= 0.1, A_2= 0.1, B_2= 0.1\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 1.1, B_1= 0.1, A_2= 0.1, B_2= 0.1\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 3.1, B_1= 0.1, A_2= 0.1, B_2= 0.1\)
For the parameter values \(a = 0.2, b = 0.1, \alpha = 1.0, \beta = 0.02,\) the charge- and magnetic flux-controlled memristor can represent nonlinear electrical bustling. In Fig. 1, the phase plots of membrane potential v(t) versus current i(t) are plotted for the given parameter values at fractional orders \(\gamma = 0.85, 1\) (Fig. 1a) and \(\gamma = 0.75, 0.95\) (Fig. 1b), respectively. Here, we notice that the phase portraits are nearly the same at each of the fractional-order values.
We know that the behavior of the plots is incumbent on the frequency of the external forcing current factor \(I_{ext}\) because the exciting state can be disposed of by the external forcing. Therefore, to check the mode dependency of electrical bustling on external excitation, we plotted Fig. 2 by changing \(f_2= 0.06\) to \(f_2= 6.66\) (other parameter values are the same as for Fig. 1). Here, we see that the phase diagrams Fig. 2a, b differ from the plots of Fig. 1 which justifies that the multiple modes can be generated in the electrical bustling.
In the previous two cases, the electromagnetic field was not incorporated as \(\lambda _E = \lambda _H = 0\). In Fig. 3, we consider the electromagnetic field changing with time taking \(\lambda _E = 1.0, \lambda _H = 1.0\). Also, the electrical movements of an isolated neuron are explored with \(I_1 = I_2 = 6.0, f_1 = 0.06, f_2= 0.06\).
In Fig. 4, we take \(f_2= 6.66\) (other parameter values are same as for Fig. 3). Here, we see that Fig. 4a, b shows that the phase portraits become dense and periodic phases are converted into chaotic phases. In particular, we can see that the phase portraits obtained at fractional orders \(\gamma = 0.85, 0.75\) are denser compared to the nearest values of \(\gamma = 1\). This justifies that fractional-order cases generate more varieties in the phase portraits between v(t) and i(t).
In Fig. 5, the firing patterns of neural activities are plotted for the parameter values \(k_1= 1.0, I_1= 6.0, f_1= 0.06, I_2= 6.0, f_2= 0.006, \lambda _H= 1.0, \alpha = 0.01, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01\) at the given fractional-order values. Here, we notice that in each fractional-order case, the dynamics of the plots is same.
Using the external forcing current, we can adjust the excitability which results in the various firing patterns. Now we consider the various value of \(I_{ext}\) by changing the values of frequency \(f_2\), whereas the frequency \(f_1\) is fixed at zero. From the group of Figs. 6, 7, 8, and 9, we can see that the electrical movements can be controlled to produce periodic oscillations when \(I_{ext}\) is incorporated with various frequencies. From Fig. 9, we notice that at fractional order values \(\gamma = 0.75, 0.85\), the patterns of membrane potential are more uniform compared to the nearest values of fractional order \(\gamma =1\).

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 0.1, B_1= 0.05, A_2= 0.1, B_2= 0.1\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 0.1, B_1= 0.01, A_2= 0.1, B_2= 0.1\)

At parameters: \(k_1= 1.0, I_1= 0.0, f_1= 0.0, I_2= 6.0, f_2= 0.2, \lambda _H= 1.0, \alpha = 1.0, \beta = 0.02, k_2= 1.0, \lambda _E= 1.0, a= 0.2, b= 0.1, k_3= 1.0, k_4= 0.01, V_{th}= 1.0, A_0= 0.01, A_1= 0.1, B_1= 0.001, A_2= 0.1, B_2= 0.1\)
As experimented in ref. [33], the magnetic excitation was incorporated by a circular induction coil on the neural circuit when external electromagnetic radiation was imposed. In this case, the new revised model is given as follows:
where the term \(V_{th} \exp {(-A_0t)}[A_1\cos (B_1t)+ A_2 \sin (B_2t)]\) defines the external electromagnetic radiation incorporated by a stimulator coil and \(V_{th}\) is the induction potential threshold. \(A_0, A_1, A_2\), and \(B_1, B_2\) are the damping ratio, amplitudes, and angular frequencies of source of radiation, simultaneously. The meaning of occurrence of large diversity in \(B_1, B_2\) is the both low- and high-frequency signals are interpolated on the neuron, respectively.
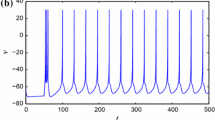
Now we plot the numerical solution of this new revised model (24) using the aforementioned generalized Euler algorithm (18). In the cluster of Figs. 10, 11, 12, 13, 14, and 15, we plotted the time-series graphs of membrane potential in an isolate neuron changing the amplitude \(A_1\) or frequency \(B_1\) in the external magnetic radiation when \(V_{th} = 1.0, A_0 = 0.01\).
In Figs. 10, 11, and 12, the frequency \(B_1\) is fixed at \(B_1= 0.1\) where the amplitude \(A_1\) is taken as \(A_1= 0.1\) (Fig. 10a, b), \(A_1= 1.1\) (Fig. 11a, b), \(A_1= 3.1\) (Fig. 12a, b). It is noticed in Fig. 11 that near to the fractional order \(\gamma =1, 0.95, 0.85\), the periodic solutions are disturbed but at fractional order \(\gamma =0.75\), the periodic solutions nearly to be exists. This justifies the possibility of the existence of various solutions in the case of fractional derivatives.
In Figs. 13, 14, and 15, the amplitude \(A_1\) is fixed at \(A_1= 0.1\) where the frequency \(B_1\) is taken as \(B_1= 0.05\) (Fig. 13a, b), \(B_1= 0.01\) (Fig. 14a, b), \(B_1= 0.001\) (Fig. 15a, b). It is noticed in Figs. 14 and 15 that near to the fractional order \(\gamma =1, 0.95\), the solutions are not perfectly periodic but at fractional order \(\gamma =0.85, 0.75\), the periodic solution exists.
From the graphical observations, we notice that fractional orders may change the behavior of the solution because of memory effects. The simulations are performed in Mathematica. The suggested methodology is not just restricted to simulating the proposed types of neuron models. This scheme can be used in modern control systems such as optimal deep learning control for modernized microgrids [45], fuzzy control for current sharing and voltage balancing in microgrids [46], etc.
5 Conclusions
In this study, we have investigated the dynamics of a fractional-order neuron model using generalized Caputo fractional derivatives. We have given proof of the existence of a unique solution for the proposed model. A new version of the Euler method has been used to derive the numerical solution of the model. The stability and error estimation have been proved for the proposed numerical scheme. In the graphical simulations, the influences of model parameters have been explored, and the results are explained briefly. From the performed analysis, we conclude that the fractional-order values provide more degree of freedom in the solutions and justify most of the possible cases of the proposed neuron model outputs. In the future, the given neuron model can be redefined using any other fractional derivative, or the same model can be revisited after a new circuit experiment. Moreover, some theoretical simulations of the stability and bifurcation of the system can be performed.
Data availability
The data used in this research are available/mentioned within the manuscript.
References
Hodgkin AL, Huxley AF (1952) A quantitative description of membrane current and its application to conduction and excitation in nerve. J Physiol 117(4):500
Stein RB (1965) A theoretical analysis of neuronal variability. Biophys J 5(2):173–194
Monroe D (2014) Neuromorphic computing gets ready for the (really) big time, 57(6):13–15
Ochs K, Michaelis D, Jenderny S (2018) An optimized morris-lecar neuron model using wave digital principles. In 2018 IEEE 61st international midwest symposium on circuits and systems (MWSCAS), IEEE, pp 61–64
Usha K, Subha PA (2019) Hindmarsh-Rose neuron model with memristors. Biosystems 178:1–9
Grill-Spector K, Henson R, Martin A (2006) Repetition and the brain: neural models of stimulus-specific effects. Trends Cogn Sci 10(1):14–23
Gu H, Pan B (2015) A four-dimensional neuronal model to describe the complex nonlinear dynamics observed in the firing patterns of a sciatic nerve chronic constriction injury model. Nonlinear Dyn 81(4):2107–2126
Wang C, Ma J (2018) A review and guidance for pattern selection in spatiotemporal system. Int J Mod Phys B 32(06):1830003
Kilbas A, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier Science
Podlubny I (1998) Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Elsevier
Oldham K, Spanier J (1974) The fractional calculus theory and applications of differentiation and integration to arbitrary order. Elsevier
Caputo M, Fabrizio M (2015) A new definition of fractional derivative without singular kernel. Progr Fract Differ Appl 1(2):1–13
Kumar P, Suat Erturk V, Nisar KS (2021) Fractional dynamics of huanglongbing transmission within a citrus tree. Math Methods Appl Sci 44(14):11404–11424
Kumar P, Govindaraj V, Erturk VS, Abdellattif MH (2022) A study on the dynamics of alkali-silica chemical reaction by using Caputo fractional derivative. Pramana 96(3):1–19
Erturk VS, Ahmadkhanlu A, Kumar P, Govindaraj V (2022) Some novel mathematical analysis on a corneal shape model by using Caputo fractional derivative. Optik 261:169086
Vellappandi M, Kumar P, Govindaraj V (2022) Role of vaccination, the release of competitor snails, chlorination of water, and treatment controls on the transmission of bovine schistosomiasis disease: a mathematical study. Phys Script 97(7):074006
Etemad S, Avci I, Kumar P, Baleanu D, Rezapour S (2022) Some novel mathematical analysis on the fractal–fractional model of the AH1N1/09 virus and its generalized Caputo-type version. Chaos, Solit Fract 162:112511
Baleanu D, Sajjadi SS, Asad JH, Jajarmi A, Estiri E (2021) Hyperchaotic behaviors, optimal control, and synchronization of a nonautonomous cardiac conduction system. Adv Diff Equ 2021(1):1–24
Baleanu D, Sajjadi SS, Jajarmi AMIN, Defterli OZLEM, Asad JH, Tulkarm P (2021) The fractional dynamics of a linear triatomic molecule. Rom Rep Phys 73(1):105
Moaddy K, Radwan AG, Salama KN, Momani S, Hashim I (2012) The fractional-order modeling and synchronization of electrically coupled neuron systems. Comput Math Appl 64(10):3329–3339
Teka W, Marinov TM, Santamaria F (2014) Neuronal spike timing adaptation described with a fractional leaky integrate-and-fire model. PLoS Comput Biol 10(3):e1003526
Armanyos M, Radwan AG (2016) Fractional-order Fitzhugh–Nagumo and Izhikevich neuron models. In 2016 13th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON), IEEE, pp 1–5
Teka WW, Upadhyay RK, Mondal A (2018) Spiking and bursting patterns of fractional-order Izhikevich model. Commun Nonlinear Sci Numer Simul 56:161–176
Khanday FA, Kant NA, Dar MR, Zulkifli TZA, Psychalinos C (2018) Low-voltage low-power integrable CMOS circuit implementation of integer-and fractional-order FitzHugh–Nagumo neuron model. IEEE Trans Neural Netw Learn Syst 30(7):2108–2122
Rajagopal K, Nazarimehr F, Karthikeyan A, Alsaedi A, Hayat T, Pham VT (2019) Dynamics of a neuron exposed to integer-and fractional-order discontinuous external magnetic flux. Front Inf Technol Electron Eng 20(4):584–590
Tolba MF, Elsafty AH, Armanyos M, Said LA, Madian AH, Radwan AG (2019) Synchronization and FPGA realization of fractional-order Izhikevich neuron model. Microelectron J 89:56–69
Malik SA, Mir AH (2020) Synchronization of fractional order neurons in presence of noise. IEEE/ACM Trans Comput Biol Bioinform 19(3):1887–1896
Malik SA, Mir AH (2020) FPGA realization of fractional order neuron. Appl Math Model 81:372–385
Ramadoss J, Aghababaei S, Parastesh F, Rajagopal K, Jafari S, Hussain I (2021) Chimera state in the network of fractional-order fitzhugh-nagumo neurons. Complexity. https://doi.org/10.1155/2021/2437737
Dar MR, Kant NA, Khanday FA (2022) Dynamics and implementation techniques of fractional-order neuron models: a survey. In: Fractional order systems, Academic Press, pp 483-511
AbdelAty AM, Fouda ME, Eltawil AM (2022) On numerical approximations of fractional-order spiking neuron models. Commun Nonlinear Sci Numer Simul 105:106078
Dar MR, Kant NA, Khanday FA, Malik SA, Kharadi MA (2022) Analog and digital implementation of fractional-order FitzHugh–Nagumo (FO-FHN) neuron model. In: Fractional-Order modeling of dynamic systems with applications in optimization, signal processing and control, Academic Press, pp 475–504
Wu F, Ma J, Zhang G (2019) A new neuron model under electromagnetic field. Appl Math Comput 347:590–599
Odibat Z, Baleanu D (2020) Numerical simulation of initial value problems with generalized caputo-type fractional derivatives. Appl Numer Math 156:94–105
Erturk VS, Kumar P (2020) Solution of a COVID-19 model via new generalized Caputo-type fractional derivatives. Chaos Solit Fract 139:110280
Jhinga A, Daftardar-Gejji V (2018) A new finite-difference predictor–corrector method for fractional differential equations. Appl Math Comput 336:418–432
Kumar P, Erturk VS, Kumar A (2021) A new technique to solve generalized Caputo type fractional differential equations with the example of computer virus model. J Math Ext 15
Odibat Z, Erturk VS, Kumar P, Govindaraj V (2021) Dynamics of generalized Caputo type delay fractional differential equations using a modified Predictor–Corrector scheme. Phys Script 96(12):125213
Odibat Z, Erturk VS, Kumar P, Ben Makhlouf A, Govindaraj V (2022) An implementation of the generalized differential transform scheme for simulating impulsive fractional differential equations. Math Probl Eng
Abd-Elhameed WM, Youssri Y (2017) Generalized Lucas polynomial sequence approach for fractional differential equations. Nonlinear Dyn 89(2):1341–1355
Shloof AM, Senu N, Ahmadian A, Salahshour S (2021) An efficient operation matrix method for solving fractal–fractional differential equations with generalized Caputo-type fractional-fractal derivative. Math Comput Simul 188:415–435
Youssri YH (2021) Orthonormal ultraspherical operational matrix algorithm for fractal–fractional Riccati equation with generalized Caputo derivative. Fract Fract 5(3):100
Kumar P, Erturk VS, Murillo-Arcila M, Harley C (2022) Generalized forms of fractional Euler and Runge-Kutta methods using non-uniform grid. Int J Nonlinear Sci Numer Simul. https://doi.org/10.1515/ijnsns-2021-0278/html
Li C, Zeng F (2013) The finite difference methods for fractional ordinary differential equations. Numer Funct Anal Opt 34(2):149–179
Yan SR, Guo W, Mohammadzadeh A, Rathinasamy S (2022) Optimal deep learning control for modernized microgrids. Appl Intell. https://doi.org/10.1007/s10489-022-04298-2
Taghieh A, Mohammadzadeh A, Zhang C, Kausar N, Castillo O (2022) A type-3 fuzzy control for current sharing and voltage balancing in microgrids. ApplSoft Comput 129:109636
Funding
Open access funding provided by University of Johannesburg. NA.
Author information
Authors and Affiliations
Contributions
All authors equally contributed to this work.
Corresponding author
Ethics declarations
Conflict of interest
This work does not have any conflicts of interest.
Code availability
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kumar, P., Erturk, V.S., Tyagi, S. et al. A generalized Caputo-type fractional-order neuron model under the electromagnetic field. Int. J. Dynam. Control 11, 2179–2192 (2023). https://doi.org/10.1007/s40435-023-01134-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-023-01134-4