
Abstract
The Riesz fractional derivative has been employed to describe the spatial derivative in a variety of mathematical models. In this work, the accuracy of the finite element method (FEM) approximations to Riesz fractional derivative was enhanced by using adaptive refinement. This was accomplished by deducing the Riesz derivatives of the FEM bases to work on non-uniform meshes. We utilized these derivatives to recover the gradient in a space fractional partial integro-differential equation in the Riesz sense. The recovered gradient was used as an a posteriori error estimator to control the adaptive refinement scheme. The stability and the error estimate for the proposed scheme are introduced. The results of some numerical examples that we carried out illustrate the improvement in the performance of the adaptive technique.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The class of partial integro-differential equations (PIDEs) is the one that combines the unknown function’s partial differentiation and integration. It is used in many cases where the memory effect should be considered. PIDEs appear in different fields of engineering and physics such as heat conduction [1], compression of poro-viscoelastic media [2], reaction diffusion problems [3], and nuclear reactor dynamics [4].
Many techniques are used to solve PIDEs. These include for example semianalytic techniques such as in [1] where He’s variational iteration technique is employed. Some numerical methods have been proposed like the finite difference method (FDM) [2]. Also, the collocation method is used to solve PIDE as in [3]. A Fixed-Point Theorem of type Monch–Krasnosel’skii is introduced in [5]. The authors of [6] considered a nonlinear form of PIDE that arises in viscoelasticity applications and solved it numerically using graded meshes. In [7], an approach that depends on unsupervised deep learning is also used to solve PIDEs. Time fractional PIDEs are solved with different methods as in [8], where a compact FDM is utilized. Also, we see in [9] that a new FDM is proposed to approximate time fractional PIDE and the stability and convergence of the mentioned numerical scheme areas proved. PIDEs have been generalized to fractional order modeling and are referred to as fractional partial integro-differential equations (FPIDEs) as in [10].
During the past decades, great attention has been paid to the so-called fractional calculus, with which we can consider integration and differentiation not only of integer order but also of fractional ones. It is applied to generalize different types of differential equations. This produces fractional differential equations, which are distinguished from integer ones as being able to describe the memory effect, which increases its modeling ability. Publications [11,12,13,14] have included a summary of fractional differential equations. Fractional derivatives are defined using many definitions, such as Caputo, Riemann–Liouville, Riesz fractional derivatives, and many others.
The Riesz fractional derivative is usually used with space fractional derivatives. It was defined on finite and infinite domains as well. Riesz definition on infinite domains was considered in [15,16,17,18,19,20], where semianalytic techniques were used, and in [21] where similarity solution was used. While Riesz definition on finite domains was considered in [22], where the McCormack numerical method was utilized. One of the numerical methods used to solve Riesz fractional partial differential equations is the finite element method (FEM), as in [23, 24].
The FEM is a powerful method that is useful and effective in solving different types of differential equations. Recently, some appraised papers have been concerned with the FEM solution for fractional differential equations. Adolfsson [25] and [26] proposed a numerical method based on the FEM for integrating the constitutive response of fractional order viscoelasticity. Roop and Ervin [27,28,29,30] analyzed theoretically the approximation of the Galerkin finite element method to some kinds of fractional partial differential equations (FPDEs). Li [31] approximated numerically the fractional differential equations with subdiffusion and superdiffusion by using the difference method and the finite element method.
For the FEM to be more reliable, adaptive techniques can be used to control the error under some predefined tolerance. Adaptive techniques are procedures that iterate until the error reaches a predefined tolerance. A significant improvement is achieved by a posteriori treatment of the finite element data. This is a post-process called recovery, which is utilized in the implementation of the recovery-based error estimator. Then, the mesh is adaptively refined so that the accuracy satisfies the requirements of the user. Adaptive FEMs for different types of equations have been considered by many authors; see, [32,33,34]. Adaptive techniques sometimes depend on recovery techniques as in [35] where solution recovery is considered, and in [36,37,38,39,40] where gradient recovery is considered.
In [23], an algorithm was proposed to solve FPIDEs using FEM on a uniform mesh. In this work, we apply an adaptive FEM which is a recovery-based technique, and this causes the mesh to be nonuniform. We modified the algorithm in [23] so that it is applicable in the case of nonuniform mesh. This is illustrated by applying the gradient recovery technique known as the polynomial preserving recovery (PPR) technique to Riesz FPIDEs of the form
with an initial condition
and boundary conditions
where \(0<\alpha <1,\) and u(x, t), f(x, t) are continuous functions.
Here, the space fractional derivative \(\frac{\partial ^{1+\alpha }u(x,t)}{ \partial \left| x\right| ^{1+\alpha }}\) is the Riesz fractional derivative of order \((1+\alpha )\), defined by [41]
and
The outline of the paper is as follows: the fundamental relations of the Riesz approximation on nonuniform mesh are introduced in “Section Riesz approximation on nonuniform mesh”. The method of solution to the FPIDE is introduced in “Section Description of method”. “Section Gradient recovery and adaptive refinement” is about the gradient recovery using the PPR technique and the proposed adaptive refinement algorithm. “Section Error analysis and stability condition” contains the error analysis and the stability for the proposed scheme. “Section 6” contains the numerical examples section where the results are presented and compared with the exact solution. The last section offers some conclusions regarding the work presented in this article.
Riesz approximation on nonuniform mesh
Here, the basic relations and lemmas that are utilized in the next sections are stated.
First, we refer to the finite domain by \(\Omega =[a,b]\) and (, ) to be the inner product on the \(L_{2}(\Omega )\) space. Then, for some integer m, the nodes \(x_{0},x_{1},\ldots ,x_{m-1},x_{m}\) partition the domain \(\Omega\) into m nonuniform subintervals. The set of all nodes in the partition forms the mesh \(M_{h}.\)
We denote the set of polynomials that are piecewise linear over the mesh nodes to be the space \(V_{h},\) which is defined as follows:
where \(P_{1}(\Omega _{i})\) denotes the space of linear polynomials defined on \(\Omega _{i}\). Then, the following is the representation of any \(v\in V_{h}\)
where the nodal-based functions \(\phi _{0}\), \(\phi _{1}\),..., \(\phi _{m}\) of \(V_{h}\) are defined as follows:
where i is an integer that takes values from 1 to \(m-1\), and
Lemma 1
If i takes the values of \(1,2,\ldots ,m-1,\) the inner product between the basic functions is given by
Proof
Let \(i=j\), from definition of inner product and the definition of \(\phi _{i}(x)\), we have:
For \(j=i-1\), it follows that
For \(j=i+1,\) we have
Otherwise, from the definition of \(\phi _{i}(x)\), the inner product will always equal zero. \(\square\)
Lemma 2
If i takes the values of \(1,2,\ldots ,m-1,\) the fractional derivative of order \(\alpha\) for the basic functions will be given by
Proof
From the definition of the first order left Caputo derivative,
If \(x_{i-1}\le x\le x_{i}\), and from definition of \(\phi _{i}(x)\), we have
If \(x_{i}\le x\le x_{i+1}\), it follows that
If \(\ x\ge x_{i+1},\) we have
If \(x\le x_{i-1},\) \(\phi _{i}(x)\) equal zero and \(\frac{\partial ^{\alpha }\phi _{i}(x)}{\partial x^{\alpha }}=0.\)
Also, from the definition of the first order right Caputo derivative
If \(x\le x_{i-1},\) and from definition of \(\phi _{i}(x),\), we have
If \(x_{i-1}\le x\le x_{i},\) it follows that
If \(x_{i}\le x\le x_{i+1}\), we have
If \(x\ge x_{i+1},\) \(\phi _{i}(x)\) equal zero and \(\frac{\partial ^{\alpha }\phi _{i}(x)}{\partial (-x)^{\alpha }}=0.\)
From (12)–(18), Lemma 2 is proved. \(\square\)
Lemma 3
Let \(B=(x_{j}-x_{j-1})\) and \(M=(x_{j+1}-x_{j}),\), then, for \(i=1,2,\ldots ,m-1,\) we have
where
Proof
From Eq. (19) along with Lemma 2, we get for \(j=i\)
where \(B=(x_{j}-x_{j-1})\) and \(M=(x_{j+1}-x_{j}).\)
For \(j=i-1,\) we have
If \(\ j\le i-2,\) it follows that
If \(\ j\ge i+1\), we have
From (23)–(26), it is proved that
where \(g_{i,j}^{(3)}\) is defined as in (21).
In the same way, Eq. (20) is proved where \(g_{i,j}^{(4)}\) is defined as in (22). \(\square\)
Description of method
Consider the FPIDE with the Riesz space fractional derivative of the form (1)–(3). The equations can be written as follows:
where
The weak form of this problem is given by
Discretizing the first order time derivative by the finite difference method (FDM) with a time step \(\Delta t\) as follows:
also, using the trapezoidal rule to approximate the integral term as follows
we get
Let\(\ u_{h}^{n}=\sum \limits _{j=0}^{m}u_{j}^{n}\phi _{j}(x)\in V_{h}(a,b),\) while \(V_{h}(a,b)\) represents the space of functions that are continuous and piecewise linear regarding the partition of the space, and they take the value of zero at the boundaries, and \(u_{j}^{n}=u_{h}(x_{j},t_{n}).\) Also choosing every function v to be \(\phi _{i}(x),i=1,2,\ldots ,m\), it follows that
From definition (7), it follows that
From Lemma 1 and Lemma 3, it follows that
Now, we have a system of linear equations that can be solved for \(u_{i}^{n}.\)
Gradient recovery and adaptive refinement
There are many techniques that were developed for the recovery of the gradient, and these techniques have been used in practice due to their efficiency as a posteriori error estimators, ease of implementation, and superconvergence (see [42,43,44,45,46,47,48] and references therein).
In [43, 49], the PPR technique was introduced for the recovery of the gradient, which works methodically in FEMs of different orders. It possesses a superconvergence property, which means that the a posteriori error estimator based on recovery is asymptotically precise.
The way the PPR technique works to recover the gradient at a mesh node d can be illustrated as follows:
Let \(M_{h}\) denotes the set of mesh nodes. For any node \(d\in M_{h},\) we first construct a patch of elements which is denoted by \(\chi _{d},\) which contains the union of elements in the first n layers around d, i.e.,
where \(\textbf{E}_{h}\) is the set of mesh elements and \(\chi _{d}(d,0)=\{d\}.\)
Then, we define a polynomial \(P_{d}\) that best fits the FEM solution \((u_{h})\) at the mesh nodes in \(\chi _{d}\) in the least squares sense. This polynomial is the least squares approximation of \(u_{h}\) at d. Then, the recovered gradient \(R_{h}\) is defined as follows:
Depending on the recovered gradient, an adaptive procedure is applied, and it can be illustrated as follows: The procedure starts with an initial mesh and the system is solved for the FEM solution. Then, using the PPR technique, the recovered gradient \(R_{h}\) is calculated. After that, the error (\(e_{k}\) ) in the finite element gradient on every element is calculated using the recovered gradient instead of the exact one. When compared to some predefined tolerance \(\tau\), the maximum error is checked so that the algorithm ends if the tolerance is reached. Otherwise, we use a marking strategy to mark certain elements that meet the criteria \(e_{k}>\eta *\tau\) for a positive parameter \(\eta <1\). The marked elements are refined; then, the mesh is adapted. Here, the system is solved using our formulation for Riesz FPIDE with nonuniform mesh. Again, the PPR technique is applied; then, the error is checked, and the procedure continues until the tolerance is reached.
Error analysis and stability condition
In this section, we present the error analysis and stability condition of the proposed scheme. We begin by listing some of the definitions and symbols that are used in this section.
The inner product and norm of the space \(L_{2(\Omega )}\) are defined by
respectively.
For any \(\sigma >0,\) we define \(^{l}H_{0}^{\sigma }(\Omega )\) and \(^{r}H_{0}^{\sigma }(\Omega )\) to be the closure of \(C_{0}^{\infty }(\Omega )\) with respect to the norms \(\left\| v\right\| _{^{l}H_{0}^{\sigma }(\Omega )}\) and \(\left\| v\right\| _{^{r}H_{0}^{\sigma }(\Omega )},\) respectively, where
where
In the usual Sobolev space \(H_{0}^{\sigma }(\Omega ),\) we also have the definition
where
Error analysis
Lemma 4
(see [41, 50]) For real \(0<\gamma <1,\) \(0<\delta <1\) if \(v(0)=0,\) \(x\in (a,b)\) then
Lemma 5
(see [50]) Let \(0<\gamma <1,\) then for any \(w,v\in H_{0}^{\gamma /2}(\Omega )\)
Lemma 6
(see [51]) For \(\gamma >0,v\in C_{0}^{\infty }(R),\) then
Lemma 7
(see [52]) Let \(u\in H^{r}(\Omega ),\) \(0<r\le m,\) and \(0\le s\le r\), then, there exists a constant \(C_{A}\) depending only on \(\Omega\) such that
where \(I_{h}\) is a projection operator from \(H^{r}(\Omega )\cap H^{s}(\Omega )\) to \(V_{h}.\)
Based on lemma 4, the variational form of Eq. (32) can be written in the following form
where
The semidiscrete problem of (27) is to find the approximate solution \(u_{h}(x,t)\in V_{h}\) such that
Let \(J_{h}:H^{\gamma /2}(\Omega )\longrightarrow V_{h}\) be the elliptic projection defined by
Lemma 8
For \(J_{h}\) defined by (49) and any \(v\in H^{r}(\Omega )\cap H_{0}^{\gamma /2},\) the following inequality holds
Proof
Let \(I_{h}\) be a projection operator from \(H^{r}(\Omega )\cap H^{\gamma /2}(\Omega )\) to \(V_{h},\) and from definition of \(L_{2(\Omega )}\), we obtain
Let \(v=J_{h}u-I_{h}u\) in (49), we obtain
Note that
where the expression \(A\lesssim B\) \((A\gtrsim B)\) means that there exists a positive real number c such that \(A\le cB\) \((A\ge cB)\).
Combining Eqs. (51) and (52), we obtain
From lemma 7,
Similarly,
Combining Eqs. (53), (54) and (55), we obtain
\(\square\)
Theorem 1
Let \(u^{n}\) and \(u_{h}^{n}\) be the solution of (46) and (48 ), respectively, the following estimate holds
Proof
From lemma 8,
Subtracting (48)–(46) and taking \(v=\psi =u_{h}^{n}-J_{h}u^{n},\) we get
where \(C_{B}=(1-0.5(\Delta t)^{2}K(t_{n},t_{n})).\) By lemma 6, we get
where \(C_{D}=2\cos (\frac{\pi \gamma }{2})\rho \Delta t.\) Arranging the terms of Eq. (60), we get
For any small \(\varepsilon >0,\) we have
where \(C_{\varepsilon }\) is a constant with respect to \(\varepsilon .\)
Combining Eqs. (58) and (62), we get
\(\square\)
Stability
Theorem 2
The FEM defined in (46) is unconditionally stable.
Proof
Let \(v=u^{n}\), \(f(x,t)=0,\) from Eq. (46), we have
Using Cauchy–Schwarz inequality, we obtain
From Eq. (65) and Cauchy–Schwarz inequality, we obtain
Equation (66) can be simplified to
We prove the stability of Eq. (48) by induction, at \(n=1\), we have
which leads to
For the induction step, we have
Using this result, we obtain
which leads to
\(\square\)
Numerical examples
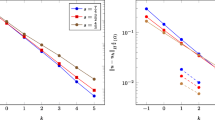
The following examples are introduced to illustrate the accuracy of the procedure proposed. For this purpose, two figures are shown for each example. The first figure shows the \(L_{2}\)norm of error with respect to the number of degrees of freedom (DOFs), and the second figure shows the \(L_{\infty }\)norm of error. In the following examples, \(\alpha\) will denotes the fractional order of Riesz, T denotes the final time, \(\tau\) denotes the tolerance, and \(\Delta t\) denotes the time step. The three examples are presented at different values for \(\alpha ,\) \(\Delta t\) and T to present different cases for the problems.
Example 1
Consider the following problem
with the boundary and initial conditions given as follows
while the exact solution is provided by
In this example, we take \(\alpha =0.9,T=1,\tau =10^{-4},\Delta t=0.01.\) Fig. 1 shows the \(L_{2}\)norm of error calculated for the gradient in two cases, the adaptive case and the uniform refinement case, whereas Fig. 2 shows the \(L_{\infty }\)norm of the error over all the elements in the whole domain, which is also calculated for the two cases.

\(L_{2}\)norm of error over the domain of example (1)

\(L_{\infty }\)norm of error over the domain of example (1)
Example 2
Consider Eq. (70) with boundary and initial conditions as in (71), while the exact solution is provided by
Here, we take \(\alpha =0.9,T=0.5,\tau =10^{-3},\Delta t=0.01.\)The \(L_{2}\) norm of error and the \(L_{\infty }\)norm of the error are calculated for the gradient and shown in Figs. 3 and 4, respectively.

\(L_{2}\)norm of error over the domain of example (2)

\(L_{\infty }\)norm of error over the domain of example (2)
Example 3
Consider Eq. (70), while the exact solution is provided by
with boundary and initial conditions as in (71). In this example, we take \(\alpha =0.5,T=1,\tau =10^{-2},\Delta t=0.001.\)The proposed procedure is applied and the \(L_{2}\)norm and the \(L_{\infty }\)norm of the error of the gradient and shown in Figs. 5 and 6, respectively.

\(L_{2}\)norm of error over the domain of example (3)

\(L_{\infty }\)norm of error over the domain of example (3)
Figs. 1, 2, 3, 4, 5 and 6 in the three examples show that the error of the adaptive refinement is better than that of the uniform refinement at the same number of nodes. This reflects the strength of the proposed procedure as it indicates that the adaptive scheme was successful in refining the mesh at the elements which have the higher error.
Conclusion
The aim of this work is to increase the accuracy of FEM approximations to space fractional partial integro-differential equation defined in Riesz sense via using an adaptive refinement scheme. Thus, we deduced the fractional derivatives of FEM bases at nonuniform mesh. These derivatives were successfully employed to recover the gradient of the considered problem and use this recovered gradient as an a posteriori error estimator that controls the adaptive refinement process. Some numerical simulations were performed, and the results clearly show that the proposed adaptive scheme yields better accuracy than the uniform refinement at the same number of nodes. Also, the theoretical analysis for the error estimate and the stability of the scheme was presented. These findings can help researchers to obtain high-accuracy results for problems that involve Riesz fractional order derivative where the solution exhibits fast changes while maintaining low computational cost. The non-classical differentiation of the basic functions for FEM solutions to problems should be designed to suit nonuniform meshes to allow for adaptive refinement techniques.
References
Dehghan, M., Shakeri, F.: Solution of parabolic integro-differential equations arising in heat conduction in materials with memory via He’s variational iteration technique. Int. J. Numer. Method. Biomed. Eng. 26(6), 705–715 (2010)
Habetler, G.J., Schiffman, R.L.: A finite difference method for analyzing the compression of poro-viscoelastic media. Computing 6, 342–348 (1970)
Aziz, I., Khan, I.: Numerical solution of diffusion and reaction–diffusion partial integro-differential equations. Int. J. Comput. Methods 15(1) (2018)
Pao, C.V.: Solution of a nonlinear integrodifferential system arising in nuclear reactor dynamics. J. Math. Anal. Appl. 48, 470–492 (1974)
Ravichandran, C., Munusamy, K., Nisar, K.S., Valliammal, N.: Results on neutral partial integrodifferential equations using Monch-Krasnosel’Skii fixed point theorem with nonlocal conditions. Fractal Fract. 6(2), 75 (2022)
Qiu, W., Xiao, X., Li, K.: Second-order accurate numerical scheme with graded meshes for the nonlinear partial integrodifferential equation arising from viscoelasticity. Commun. Nonlinear Sci. Numer. Simul. 116 (2023)
Fu, W., Hirsa, A.: An unsupervised deep learning approach to solving partial integro-differential equations. Quant. Finance 22(8), 1481–1494 (2022)
Luo, Z., Zhang, X., Wang, S., Yao, L.: Numerical approximation of time fractional partial integro-differential equation based on compact finite difference scheme. Chaos Solit. Fractals. 161 (2022)
Santra, S., Mohapatra, J.: A novel finite difference technique with error estimate for time fractional partial integro-differential equation of Volterra type. J. Comput. Appl. Math. 400 (2022)
Dehghan, M., Abbaszadeh, M.: Error estimate of finite element/finite difference technique for solution of two-dimensional weakly singular integro-partial differential equation with space and time fractional derivatives. J. Comput. Appl. Math. 356, 314–328 (2019)
Diethelm, K.: The Analysis of Fractional Differential Equations. Springer, Berlin (2004)
Hilfer, E.: Applications of Fractional Calculus in Physics. World Scientific Publishing, New York (2000)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives: Theory and Applications. Gordon and Breach Science Publishers, Philadelphia (1993)
Shamseldeen, S., Elsaid, A., Madkour, S.: Caputo-Riesz-Feller fractional wave equation: analytic and approximate solutions and their continuation. J. Appl. Mathe. Comput. 59(1), 423–444 (2019)
Elsaid, A., Shamseldeen, S., Madkour, S.: Analytical approximate solution of fractional wave equation by the optimal homotopy analysis method. Eur. J. Pure Appl. Math. 10(3), 586–601 (2017)
Elsaid, A., Shamseldeen, S., Madkour, S.: Iterative solution of fractional diffusion equation modelling anomalous diffusion. Appl. Appl. Math. Int. J. 11(2), 21 (2016)
Elsaid, A., Shamseldeen, S., Madkour, S.: Semianalytic solution of space-time fractional diffusion equation, Int. J. Diff. Eqs. 2016 (2016). Article ID 2371837
Elsaid, A.: Homotopy analysis method for solving a class of fractional partial differential equations. Commun. Nonlinear Sci. Numer. Simul. 16, 3655–3664 (2011)
Elsaid, A.: The variational iteration method for solving Riesz fractional partial differential equations. Comput. Math. Appl. 60, 1940–1947 (2010)
Elsaid, A., Latif, M.S.A., Maneea, M.: Similarity solutions for solving Riesz fractional partial differential equations. Prog. Fract. Differ. Appl. 2(4), 293–298 (2016)
Haghighi, A. R., Dadvand, A., Ghejlo, H. H.: Solution of the fractional diffusion equation with the Riesz fractional derivative using McCormack method. Commun. Adv. Comput. Sci. Appl.cacsa-00024, 1–11 (2014)
Feng, L.B., Zhuang, P., Liu, F., Turner, I., Gu, Y.T.: Finite element method for space-time fractional diffusion equation. Numer. Algorithms 72, 749–767 (2015)
Lai, J., Liu, F., Anh, V., Liu, Q.: A space-time finite element method for solving linear Riesz space fractional partial differential equations. Numer. Algorithms 88, 499–520 (2021)
Adolfsson, K., Enelund, M., Larsson, S.: Adaptive discretization of an integro-differential equation with a weakly singular convolution kernel. Comput. Method Appl. Mech. Eng. 192(51–52), 5285–5304 (2003)
Adolfsson, K., Enelund, M., Larsson, S.: Adaptive discretization of fractional order viscoelasticity using sparse time history. Comput. Method Appl. Mech. Eng. 193(42–44), 4567–4590 (2004)
Ervin, V.J., Roop, J.P.: Variational solution of fractional advection dispersion equations on bounded domains in Rd. Numer. Methods Part. Differ. Equ. 23(2), 256–281 (2007)
Ervin, V.J., Heuer, N., Roop, J.P.: Numerical approximation of a time dependent, nonlinear, space-fractional diffusion equation. SIAM J. Numer. Anal. 45(2), 572–591 (2007)
Roop, J.P.: Computational aspects of FEM approximation of fractional advection dispersion equations on bounded domains in R2. J. Comput. Appl. Math. 193(1), 243–268 (2006)
Ervin, V.J., Roop, J.P.: Variational formulation for the stationary fractional advection dispersion equation. Numer. Methods Part. Differ. Equ. 22(3), 558–576 (2006)
Li, C., Zhao, Z., Chen, Y.: Numerical approximation of nonlinear fractional differential equations with subdiffusion and superdiffusion. Comput. Math. Appl. 62(3), 855–875 (2011)
Graham, I.G., Shaw, R.E., Spence, A.: Adaptive numerical solution of integral equations with application to a problem with a boundary layer. Congr. Numer. 68, 75–90 (1989)
Bertoldo, A.: FEMS: an adaptive finite element solver. In: IEEE International Parallel and Distributed Processing Symposium, pp. 1–8 (2007)
Essam, R., El-Agamy, M., Elsaid, A.: Heat flux recovery in a multilayer model for skin tissues in the presence of a tumor. Eur. Phys. J. Plus 134–285 (2019)
Sameeh, M., Elsaid, A., ElAgamy, M.: Adaptive Finite element solution for Volterra partial integro differential equations. Commun. Adv. Comput. Sci. Appl. 1, 1–11 (2019)
Adel, E., Elsaid, A., El-Agamy, M.: Adaptive finite element method for Fredholm integral equation. South Asian J. Math. 6(5), 239–248 (2016)
Huang, Y., Jiang, K., Yi, N.: Some weighted averaging methods for gradient recovery. Adv. Appl. Math. Mech. 4, 131–155 (2012)
Wei, H., Chen, L., Huang, Y.: Superconvergence and gradient recovery of linear Fnite elements for the Laplace Beltrami operator on general surfaces. SIAM J. Numer. Anal. 45, 1064–1080 (2007)
Bank, R., Xu, J.: Asymptotically exact a posteriori error estimators, part I: grids with superconvergence. SIAM J. Numer. Anal. 2294–2312 (2004)
Heimsund, B., Tai, X., Wang, J.: Superconvergence for the gradient of Finite element approximations by L2 projections. SIAM J. Numer. Anal. 1263–1280 (2003)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Repin, S.: A Posteriori Estimates for Partial Differential Equations. Walter de Gruyter, Berlin (2008)
Naga, A., Zhang, Z.: A posteriori error estimates based on the polynomial preserving recovery. SIAM J. Numer. Anal. 1780–1800 (2005)
Xu, J., Zhang, Z.: Analysis of recovery type a posteriori error estimators for mildly structured grids. Math. Comput. 73(247), 1139–1152 (2004)
Ainsworth, M., Oden, J.: A Posteriori Error Estimation in Finite Element Analysis. Wiley Interscience 37 (2000)
Babuska, I., Strouboulis, T.: The Finite Element Method and Its Reliability. Oxford University Press, Oxford (2001)
Zienkiewicz, O., Zhu, J.: The superconvergent patch recovery and a posteriori error estimates, part I: the recovery technique. Int. J. Numer. Methods Eng. 33(7), 1331–1364 (1992)
Zienkiewicz, O., Zhu, J.: The superconvergent patch recovery and a posteriori error estimates, part II: error estimates and adaptivity. Int. J. Numer. Methods Eng. 33(7), 1365–1382 (1992)
Zhang, Z., Naga, A.: A new Finite element gradient recovery method: superconvergence property. SIAM J. Sci. Comput. 26(4), 1192–1213 (2005)
Li, X.J., Xu, C.J.: Existence and uniqueness of the weak solution of the space-time fractional diffusion equation and a spectral method approximation. Commun. Comput. Phys. 8(5), 1016–1051 (2010)
Li, X.J., Xu, C.J.: A space-time spectral method for the time fractional diffusion equation. SIAM J. Numer. Anal. 47(3), 2108–2131 (2009)
Zheng, Y., Li, C., Zhao, Z.: A note on the finite element method for the space fractional advection diffusion equation. Comput. Math. Appl. 59, 1718–1726 (2010)
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). No funding was received to assist with the preparation of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no known conflict of interests to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Adel, E., El-Kalla, I.L., Elsaid, A. et al. An adaptive finite element method for Riesz fractional partial integro-differential equations. Math Sci (2023). https://doi.org/10.1007/s40096-023-00518-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40096-023-00518-z