
Abstract
The main objective of this paper is to obtain the approximate solution of superdiffusion fourth-order partial differential equations. Quintic B-spline collocation method is employed for fractional differential equations (FPDEs). The developed scheme for finding the solution of the considered problem is based on finite difference method and collocation method. Caputo fractional derivative is used for time fractional derivative of order \(\alpha\), \(1<\alpha <2\). The given problem is discretized in both time and space directions. Central difference formula is used for temporal discretization. Collocation method is used for spatial discretization. The developed scheme is proved to be stable and convergent with respect to time. Approximate solutions are examined to check the precision and effectiveness of the presented method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The idea of differentiation and integration to non integer order has been studied in fractional calculus. The subject fractional calculus is the generalized form of classical calculus. It is as old as classical calculus but getting more attention these days due to its applications in various fields, such as science and engineering. Oldham and Spanier [1], Podlubny [3], and Miller and Ross [2] provide the history and a comprehensive treatment of this subject.
In recent decades, it has been observed by many mathematicians, scientists, and researchers that non-integer operators (differential and integral) play an important role in describing the properties of physical phenomena. Fractional derivatives and integrals efficiently describe the history and inherited properties of different processes and equipments. It has further been observed that fractional models are more efficient and accurate than already developed classical models. The mathematical modeling of real world problems, such as earthquake, traffic flow, fluid flow, signal processing, and viscoelastic problems, results in FPDEs.
A fourth-order linear PDE is defined as
The fourth-order problems play a significant role for the development of engineering and modern science. For example, window glasses, floor systems, bridge slabs, etc. are modeled by fourth-order PDEs. It also represents beam problem where v is the transversal displacement of the beam, \(\nu\) is the ratio of flexural rigidity of the beam to its mass per unit length, t is time, and x is space variable, h(x, t) is the dynamic driving force acting per unit mass.
The considered equation, is the superdiffusion fourth-order partial differential equation, which has the following form
where \(t_{0}, t_{f}\) represents initial and final time, respectively.
The time-fractional superdiffusion fourth-order problems play an important role in modern science and engineering. For example, airplane wings and transverse vibrations of sustained tensile beam can be modeled as plates with different boundary supports which are successfully governed by superdiffusion fourth-order differential equations.
The given problem is solved with initial conditions
Following three boundary conditions are used for solving Eq. (1.1)
-
I.
$$\left\{ \begin{array}{ll} v(a,t)=v(b,t)=0,\\ v_{z}(a,t)=v_{z}(b,t)=0, \quad t_{0}\le t\le t_{f}. \end{array}\right.$$
-
II.
$$\left\{ \begin{array}{ll} v(a,t)=v(b,t)=0,\\ v_{zz}(a,t)=v_{zz}(b,t)=0, \quad t_{0}\le t\le t_{f}. \end{array}\right.$$
-
III
$$\left\{ \begin{array}{ll} v(a,t)=v(b,t)=0,\\ v_{zz}(a,t)-Q v_{z}(a,t)=v_{zz}(b,t)-Q v_{z}(b,t)=0, \quad t_{0}\le t\le t_{f}, \end{array}\right.$$
where Q is an arbitrary constant.
Caputo fractional derivative is defined as
Collocation method is widely used to provide the solution of partial differential equations. Depending on the situation, some times, it is useful to find the solution of FPDEs at various locations in the given problem domain, then the spline solutions guarantee to give the information of spline interpolation between mesh points.
In many situations, it is harder to calculate the analytical solutions of fractional PDEs using analytical methods. Due to this reason, the mathematicians are motivated to develop numerical methods for the approximate solution of FPDEs. The approximate methods for solving FPDEs have become popular among the researchers in the last 10 years. A variety of approximate techniques were used for finding the solution of FPDEs, such as the FDM, FEM, FVM, and the collocation method etc.
Many authors applied different numerical methods to find the solution of fractional PDEs.
Siddiqi and Arshed [7] developed a numerical scheme for the solution of time-fractional fourth-order partial differential equation with fractional derivative of order \(\alpha\) \((0<\alpha <1)\). Lin and Xu [6] developed a numerical scheme for time-fractional diffusion equation with fractional derivative of order \(\alpha , (0<\alpha <1)\). Yang et al. [11] developed a novel numerical scheme for solving fourth-order partial integro-differential equation with a weakly singular kernel. Yang et al. [8] developed a quasi-wavelet-based numerical method for solving fourth-order partial integro-differential equations with a weakly singular kernel. Khan et al. [9], proposed a numerical method for the solution of time-fractional fourth-order differential equations with variable coefficients using Adomian decomposition method (ADM) and He’s variational iteration method (HVIM). Zhang and Han [10] developed a quasi-wavelet-based numerical method for time-dependent fractional partial differential equation. Zhang et al. [12] proposed quintic B-spline collocation method for the numerical solution of fourth-order partial integro-differential equations with a weakly singular kernel. Khan et al. [4] used sextic spline solution for solving fourth-order parabolic partial differential equation. Dehghan [5] used finite difference techniques for the numerical solution of partial integro-differential equation arising from viscoelasticity. In [15], Bhrawy and Abdelkawy used fully spectral collocation approximation for solving multi-dimensional fractional Schrodinger equations. Bhrawy et al. [16] proposed a new formula for fractional integrals of Chebyshev polynomials and application for solving multi-term fractional differential equations. Bhrawy [17] developed a new spectral algorithm for a time-space fractional partial differential equations with subdiffusion and superdiffusion. In [18], Bhrawy et al. gave a review of operational matrices and spectral techniques for fractional calculus. Bhrawy et al. [19] proposed Chebyshev–Laguerre Gauss–Radau collocation scheme for solving time fractional sub-diffusion equation on a semi-infinite domain. Bhrawy [20] developed a space-time collocation scheme for modified anomalous subdiffusion and nonlinear superdiffusion equations. In [21], Doha et al. developed an efficient Legendre Spectral Tau matrix formulation for solving fractional sub-diffusion and reaction sub-diffusion equations. Bhrawy [22] proposed a highly accurate collocation algorithm for 1 + 1 and 2 + 1 fractional percolation equations. In [23], Bhrawy and Zaky used fractional-order Jacobi tau method for a class of time-fractional PDEs with variable Coefficients.
This paper is designed to determine the approximate solution of superdiffusion fourth order PDEs. The approximate solution is based on central difference formula and B-spline collocation method.
The paper is divided into six sections. The quintic B-spline basis function is given in Sect. 2. The finite difference approximation for time discretization of the given problem is discussed in Sect. 3. The stability and convergence of temporal discretization are established. Space discretization based on B-spline collocation technique is discussed in Sect. 4. Approximate solutions are obtained in Sect. 5 which support the theoretical results. The conclusion is given is Sect. 6.
Quintic B-spline
The problem domain [a, b] has been subdivided into N elements having uniform step size h with knots \(z_{j}, j=0,1,2,\ldots ,N\) such that \(\{a=z_{0}<z_{1}<z_{2}<\ldots <z_{N}=b\}\), \(h= z_{j}-z_{j-1}\), \(j=1, 2,\ldots , N\).
To define basis functions for quintic B-spline, it is first needed to introduce ten additional knots, \(z_{-5},z_{-4},z_{-3},z_{-2},z_{-1},z_{N+1},z_{N+2},z_{N+3},z_{N+4},z_{N+5}\) such that \(z_{-5}<z_{-4}<z_{-3}<z_{-2}<z_{-1}<z_{0}\) and \(z_{N}<z_{N+1}<z_{N+2}<z_{N+3}<z_{N+4}<z_{N+5}.\)
The quintic B-spline basis functions \(Q_{j}(z)\), \(j=-2, \ldots ,N+2\) are defined as
The approximate solution \(V^{k+1}(z)\) at \(k+1\) time level to the exact solution \(v^{k+1}(z)\) is obtained as a linear combination of quintic B-spline basis functions \(Q_{j}(z)\) as
where \(c_{j}\) are unknowns. Using Eq. (2.1) and basis functions, the approximate solution V and its derivatives at the nodes \(z_{j}\), can be calculated as
Time discretization
Caputo fractional derivative is used for temporal discretization. Let \(t_{k}=k\Delta t\), \(k=0,1,2,\ldots ,K\), where \(\Delta t=\frac{t_{f}}{K}\) is the time step size and \(t_{f}\) be the final time. Caputo fractional derivative is discretized using central difference approximation as
where \(b_{l}=(l+1)^{2-\alpha }-l^{2-\alpha }\) and \(b_{0}=1\) and \(\tau =(t_{k+1}-s)\).
and
The time discrete operator is represented by \(D^{\alpha }\) and defined as
Then Eq. (3.1) can be written as
The second order approximation of Caputo derivative as discussed in [13] is given as
where E is a constant.
After approximating \(\frac{1}{\Gamma (2-\alpha )}\int _{0}^{t_{k+1}} \frac{\partial ^{2} v(z,s)}{\partial s^{2}} \frac{d s}{(t_{k+1}-s)^{\alpha -1}}\) by \(D^{\alpha }v(z,t_{k+1})\), the finite difference scheme according to (1.1) can be written as
The above equation can be rewritten as
where \(v^{k+1}(x)=v(x,t_{k+1})\) and \(\alpha _{0}= \Gamma (3-\alpha )\Delta t^{\alpha }\),
Using the following initial conditions and the boundary conditions \((\mathrm{I, II, III})\)
The developed method is a three time level method. To implement the developed method, it is first required to calculate \((v^{-1})\) and \((v^{0})\).
In particular, for \(k=0\), the scheme simply leads to
where \(v^{0}(z)=v(z,t_{0})=f_{0}(z)\).
Equations (3.4) and (3.7), along with initial conditions (3.5) and (3.6) and boundary conditions \((\mathrm I,II,III)\) form a whole set of the time-discrete problem of Eq. (1.1).
\(r^{k+1}\) is the error term can be defined as
Using Eq. (3.3),
Some functional spaces endowed with standard norms and inner products, to be used hereafter, are defined as under
where \(L^{2}\left( \Omega \right)\) is the space of measurable functions whose square is Lebesgue integrable in \(\Omega\). The inner products of \(L^{2}\left( \Omega \right)\) and \(H^{2}(\Omega )\) are defined, respectively, by
and the corresponding norms by
The norm \(\left\| .\right\|\) of the space \(H^{m}\left( \Omega \right)\) is defined as
Instead of using the above standard \(H^{2}\)-norm, it is preferred to define \(\Vert .\Vert _{2}\)
where \(\alpha _{0}= \Gamma (2-\alpha )\Delta t^{\alpha }\).
For the convergence and stability analysis, the following weak formulation of Eqs. (3.4) and (3.7) is needed, i.e., finding \(v^{k+1} \in H_{0}^{2}(\Omega )\), such that for all \(w \in H_{0}^{2}(\Omega )\),
and
Discrete Gronwall inequality
If the sequences \(\{a_{l}\}\) and \(\{z_{l}\}\), \(jl=1,2,\)..., n, satisfy inequality
where \(a_{l}\ge 0\), \(b\ge 0\), then the inequality
Stability and convergence analysis
Theorem 1
The proposed time-discrete scheme (3.6) is stable, if for all \(\Delta t >0\), the following relation holds
where \(\Vert .\Vert _{2}\) is defined in (3.10).
Proof
For \(k=0\), let \(w=v^{1}\) in Eq. (3.11),
Equation (3.11) takes the following form
Integrating the above equation, we have
Due to boundary conditions on w all the boundary contributions disappeared.
Using the inequality \(\Vert w\Vert _{0}\le \Vert w\Vert _{2}\) and Schwarz inequality Eq. (3.15) takes the following form
hence
Suppose that the result hold for \(w=v^{l}\) i.e.
Taking \(w=v^{k+1}\) in Eq. (3.11), it can be written as
Integrating the above equation, we get
Using the Schwarz inequality and the inequality \(\Vert w\Vert _{0}\le \Vert w\Vert _{2}\) the above equation can be written as
Using (3.13) we have
\(\square\)
Theorem 2
The numerical solution obtained by the proposed method converges the exact solution, if the following relation holds
where E is a constant and \(E=(1+b_{k})\exp (1+b_{k-1}-b_{k}).\)
Proof
Let \(s^{k}=v(z,t_{k})-v^{k}(z)\), for \(k=1\), by combining Eqs. (1.1), (3.11), the error equation becomes
using Schwarz inequality and the inequality \(\Vert w\Vert _{0}\le \Vert w\Vert _{2}\)
Let \(v=s^{1}\), noting \(s^{0}=0\), the above equation takes the following form
since
Using Eq.(3.9), it leads to
Hence (3.19) is proved for the case \(k=1\).
For inductive part, suppose (3.19) holds for \(l=1, 2, 3,\ldots , k\), i.e.
For \(k=s+1\) the Eqs. (1.1), (3.11) are used and the error equation can be written, for all \(v\in H^{2}_{0}(\Omega )\), as
using \(\Vert w\Vert _{0}\le \Vert w\Vert _{2}\) and Schwarz inequality the above equation, for \(v=s^{k+1}\), can be written as
Using (3.15)
\(\square\)
Space discretization
Collocation method with quintic B-spline basis functions is employed for space discretization. Putting Eq. (2.1) into Eq. (3.4), we obtain the following equation
The above equation can be rewritten as
The above equation can be rewritten as a system of linear equations
where
This system has \(N+1\) equations in \(N+5\) unknowns \(c^{k+1}_{-2},c^{k+1}_{-1},\ldots ,c^{k+1}_{N+1},c^{k+1}_{N+2}\). Unique solution of the above system is obtained by eliminating the unknowns \(c_{-2}^{k+1},c_{-1}^{k+1},c_{N+1}^{k+1}\), and \(c_{N+2}^{k+1}\) using boundary conditions.
Numerical results
In this section, two examples are considered to check the accuracy and efficiency of the proposed method. The main objective of these examples is to verify the rate of convergence of the approximate results for \(\alpha\). From the following Tables 1 and 2, it is clear that the approximate results support the theoretical estimates.
Example 1
Consider the following superdiffusion PDE of fourth order
with initial condition
and boundary condition \(\mathrm {I}\)
The exact solution of the problem is
The error norms \(L_{\infty }\) and \(L_{2}\) are calculated for \(N=100\) and different temporal step sizes. The temporal rate of convergence at \(t_{f}=1.0\) is presented in Table 1. The temporal rate of convergence obtained by the proposed method support the theoretical results.
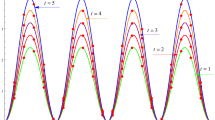
To indicate the effects of the proposed method for larger time level K, the exact solution and the approximate solution are plotted using \(N=50\), \(K=1000\) and \(\Delta t=0.00001\) as shown in Fig. 1. It is clear from the Fig. 1 that the numerical solution is highly consistent with the exact solution, which indicates that the proposed method is very effective. In Fig. 2, the exact solution is represented by solid line and the numerical solution is represented by dotted line at \(K=1000\) time level.
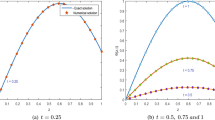
The temporal rate of convergence of \(L_{2}\) norm error as a function of the time step \(\Delta t\) for \(\alpha = 1.50\) is shown in Fig. 3.

The results at \(N=50\), \(K=1000\) and \(\Delta t =0.00001\) for Example 1

The exact and numerical solutions at \(K=1000\). Dotted line numerical solution, solid line exact solution

Errors as a function of the time \(\Delta t\) for \(\alpha =1.50\)
Example 2
Consider the following superdiffusion PDE of fourth order
with the initial condition
and boundary condition III
The exact solution of the problem is
The error norms \(L_{\infty }\) and \(L_{2}\) are calculated for \(N=80\) and different temporal step sizes. The temporal rate of convergence at \(t_{f}=1.0\) is presented in Table 2. The temporal rate of convergence obtained by the proposed method support theoretical results.
To indicate the effects of the proposed method for larger time level, the exact solution and the approximate solution are plotted using \(N=80\), \(K=1000\), and \(\Delta t=0.00001\) as shown in Fig. 4. It is clear from the Fig. 4 that the numerical solution is highly consistent with the exact solution, which indicates that the proposed method is very effective. In Fig. 5, the exact solution is represented by solid line and the numerical solution is represented by dotted line at \(K=1000\) time level.
The temporal rate of convergence of \(L_{2}\) norm error as a function of the time step \(\Delta t\) for \(\alpha = 1.75\) is shown in Fig. 6.

The results at \(N=80\), \(K=1000\) and \(\Delta t =0.00001\) for Example 2

The exact and numerical solutions at \(K=1000\). Dotted line numerical solution, solid line exact solution

Errors as a function of the time step \(\Delta t\) for \(\alpha = 1.75\)
Conclusion
The solution of superdiffusion fourth order equation has been developed. Central difference formula and quintic B-spline are used for discretizing time and space variables, respectively. The proposed method is stable and the approximate results approach the analytical results with order \(O(\Delta t^{2})\). The approximate results obtained by the suggested method support the theoretical estimates.
References
Oldham, K.B., Spanier, J.: The fractional calculus. Academic Press, New York (1974)
Miller, K.S., Ross, B.: An introduction to the fractional calculus and fractional differential equations. Wiley, New York (1993)
Podlubny, I.: Fractional differential equations. Academic Press, New York (1999)
Khan, A., Khan, I., Aziz, T.: Sextic spline solution for solving fourth-order parabolic partial differential equation. Int. J. Comput. Math. 82, 871–879 (2005)
Dehghan, M.: Solution of a partial integro-differential equation arising from viscoelasticity. Int. J. Comput. Math. 83, 123–129 (2006)
Lin, Y., Xu, C.: Finite difference/spectral approximations for time-fractional diffusion equation. J. Comput. Phys. 225, 1533–1552 (2007)
Siddiqi, S.S., Arshed, S.: Numerical solution of time-fractional fourth-order partial differential equations. Int. J. Comput. Math. 92(7), 1496–1518 (2015). doi:10.1080/00207160.2014.948430
Yang, X.H., Xu, D., Zhang, H.X.: Quasi-wavelet based numerical method for fourth-order partial integro-differential equations with a weakly singular kernel. Int. J. Comput. Math. 88(15), 3236–3254 (2011)
Khan, N.A., Khan, N.U., Ayaz, M., Mahmood, A., Fatima, N.: Numerical study of time-fractional fourth-order differential equations with variable coefficients. J. King Saud Univ. (Science) 23, 91–98 (2011)
Zhang, H.X., Han, X.: Quasi-wavelet method for time-dependent fractional partial differential equation. Int. J. Comput. Math. (2013). doi:10.1080/00207160.2013.786050
Yang, X.H., Xu, D., Zhang, H.X.: Crank–Nicolson/quasi-wavelets method for solving fourth order partial integro-differential equation with a weakly singular kernel. J. Comput. Phys. 234, 317–329 (2013)
Zhang, H.X., Han, X., Yang, X.H.: Quintic B-spline collocation method for fourth order partial integro-differential equations with a weakly singular kernel. Appl. Math. Comput. 219, 6565–6575 (2013)
Sousa, E.: How to approximate the fractional derivative of order 1 < α ≤ 2. In: Proceedings of FDA10. The 4th IFAC workshop fractional differentiation and its applications
Atangana, A., Secer, A.: A note on fractional order derivatives and table of fractional derivatives of some special functions. Abstract and Applied Analysis. 2013, 8 pages (2013). doi:10.1155/2013/279681 (Article ID 279681)
Bhrawy, A.H., Abdelkawy, M.A.: A fully spectral collocation approximation for multi-dimensional fractional Schrodinger equations. J. Comput. Phys. 294, 462–483 (2015)
Bhrawy, A.H., Tharwat, M.M., Yildirim, A.: A new formula for fractional integrals of Chebyshev polynomials: application for solving multi-term fractional differential equations. Appl. Math. Model. 37, 4245–4252 (2013)
Bhrawy, A.H.: A new spectral algorithm for a time-space fractional partial differential equations with subdiffusion and superdiffusion. Proc. R. Acad. A 17, 39–46 (2016)
Bhrawy, A.H., Taha, T.M., Machado, J.A.T.: A review of operational matrices and spectral techniques for fractional calculus. Nonlinear Dyn. 81, 1023–1052 (2015)
Bhrawy, A.H., Abdelkawy, M.A., Alzahrani, A.A., Baleanu, D., Alzahrani, E.O.: A Chebyshev–Laguerre Gauss–Radau collocation scheme for solving time fractional sub-diffusion equation on a semi-infinite domain. Proc. R. Acad. Ser. A 16, 490–498 (2015)
Bhrawy, A.H.: A space-time collocation scheme for modified anomalous subdiffusion and nonlinear superdiffusion equations. Eur. Phys. J. Plus 131, 12 (2016)
Doha, E.H., Bhrawy, A.H., Ezz-Eldien, S.S.: An efficient legendre spectral tau matrix formulation for solving fractional sub-diffusion and reaction sub-diffusion equations. J. Comput. Nonlinear Dyn. 10(2), 021019 (2015)
Bhrawy, A.H.: A highly accurate collocation algorithm for 1+1 and 2+1 fractional percolation equations. J. Vib. Control (2015). doi:10.1177/1077546315597815
Bhrawy, A., Zaky, M.: A fractional-order Jacobi tau method for a class of time-fractional PDEs with variable coefficients. Math. Methods Appl. Sci. (2015). doi:10.1002/mma.3600
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Arshed, S. Quintic B-spline method for time-fractional superdiffusion fourth-order differential equation. Math Sci 11, 17–26 (2017). https://doi.org/10.1007/s40096-016-0200-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40096-016-0200-2
Keywords
- Time-fractional PDE
- Superdiffusion
- Quintic B-spline
- Collocation method
- Convergence analysis
- Stability analysis