
Abstract
In this paper, we propose a new inertial iterative method to solve classical variational inequalities with pseudomonotone and Lipschitz continuous operators in the setting of a real Hilbert space. The proposed iterative scheme is basically analogous to the extragradient method used to solve the problems of variational inequalities in real Hilbert spaces. The strong convergence of the proposed algorithm is set up with the prior knowledge of Lipschitz’s constant of an operator. Finally, several computational experiments are listed to show the applicability and efficiency of the proposed algorithm.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This article studies the iterative method that is used to estimate the solution of variational inequality problem (shortly, VIP) in the setting of a real Hilbert space. Let \({\mathcal {X}}\) be a real Hilbert space and \({\mathcal {D}}\) be a non-empty, closed, and convex subset of \({\mathcal {X}}.\) Let \({\mathcal {S}}: {\mathcal {X}} \rightarrow {\mathcal {X}}\) to be an operator. The problem (VIP) for \({\mathcal {S}}\) on \({\mathcal {D}}\) is given as follows [15, 22]:
Let us consider that \(\Pi \) is the solution set of the problem (VIP). This idea of variational inequalities includes different disciplines such as partial differential equations, optimization, optimal control, mechanics, mathematical programming, and finance (see [6, 11,12,13,14, 18, 24]). This problem is an important topic in the physical sciences, and a considerable amount of discussion has been given to many authors who have dedicated themselves to studying not only the theory of existence and the stability of solutions but also the iterative method used to solve the problem.
Korpelevich [16] and Antipin [2] have established the following extragradient method. Their method consists of the following: Let \(u_{0} \in {\mathcal {D}}\) and \(0< \tau < \frac{1}{L}\) such that
On the other hand, many projection methods are used to figure out the numerical solution of variational inequalities. Many researchers have suggested various forms of projection techniques to solve the problem (VIP) (see for details [10, 16, 19, 25, 26, 28,29,30,31,32, 34, 36]). Almost all the methods for solving the problem (VIP) are based on the projection method, which is computed on the feasible set \({\mathcal {D}}.\) It is important to note that the above well-established method has two significant flaws, the first being the fixed constant step size, which involves the knowledge or approximation of the Lipschitz constant of the respective operator and is only weakly convergent in the Hilbert spaces. From the computational point of view, it might be problematic to use a fixed step size, and hence the convergence rate and appropriateness of the method could be affected.
The main contribution of this study is to develop an inertial-type method used to improve the convergence rate of the sequence. Previously, such approaches have been developed based on the oscillator equation with damping and conservative force restoration. This second-order dynamical structure is called a strong friction ball and was originally studied by Polyak in [20]. Primarily, the functionality of the inertial-type method is that it will use the two prior iterations to execute the next iteration.
Therefore, a natural question is raised:
“Is it possible to introduce new strongly convergent inertial extragradient-like method to solve the problem (VIP)”?
In this study, we give a positive answer to the above question, i.e., the gradient method indeed generates a strongly convergent iterative sequence by letting a fixed and variable step size rule. In this paper, we study a different method to obtain strong convergence and introduce a new iterative method for solving variational inequalities involving pseudomonotone and the Lipschitz operator in a real Hilbert space. Our method is inspired by one projection method [16] and the inertial technique in [20]. At each iteration, the method only needs to compute one projection onto the feasible set. Under some suitable conditions imposed on control parameters, the iterative sequences generated by our method converge strongly to some solution of the considered problem. We also provide numerical examples to illustrate the computational effectiveness of the new method over some existing methods.
The paper is organized in the following way. In Sect. 2, we review some concepts and preliminary results used in the paper. Section 3 deals with the description of the method and proves its convergence theorems. Finally, Sect. 4 presents some numerical results to illustrate the convergence and effectiveness of the proposed method.
2 Background
In this section of the manuscript, we have written a number of important identities and relevant lemmas and definitions.
For all \(u, y \in {\mathcal {X}},\) we have
A metric projection \(P_{{\mathcal {D}}}(y_{1})\) of \(y_{1} \in {\mathcal {X}}\) is defined by
First, we list some of the important features of projection operator.
Lemma 2.1
[3] Suppose that \(P_{{\mathcal {D}}} : {\mathcal {X}} \rightarrow {\mathcal {D}}\) is a metric projection. Then, the following conditions were satisfied.
-
(i)
\( y_{3} = P_{{\mathcal {D}}}(y_{1}) \) if and only if
$$\begin{aligned} \langle y_{1} - y_{3}, y_{2} - y_{3} \rangle \le 0, \quad \forall \, y_{2} \in {\mathcal {D}}. \end{aligned}$$ -
(ii)
$$\begin{aligned} \Vert y_{1} - P_{{\mathcal {D}}}(y_{2}) \Vert ^{2} + \Vert P_{{\mathcal {D}}}(y_{2}) - y_{2} \Vert ^{2} \le \Vert y_{1} - y_{2} \Vert ^{2}, \quad y_{1} \in {\mathcal {D}}, y_{2} \in {\mathcal {X}}. \end{aligned}$$
-
(iii)
$$\begin{aligned} \Vert y_{1} - P_{{\mathcal {D}}}(y_{1}) \Vert \le \Vert y_{1} - y_{2} \Vert ,\quad y_{2} \in {\mathcal {D}}, y_{1} \in {\mathcal {X}}. \end{aligned}$$
Lemma 2.2
[35] Assume that \(\{p_{n}\} \subset [0, +\infty )\) is a sequence satisfies the following inequality:
Furthermore, \(\{q_{n}\} \subset (0, 1)\) and \(\{r_{n}\} \subset {\mathbb {R}}\) be two sequences such that
Then, \(\lim _{n \rightarrow +\infty } p_{n} = 0.\)
Lemma 2.3
[17] Assume that \(\{p_{n}\}\) is a sequence of real numbers such that there exists a subsequence \(\{n_{i}\}\) of \(\{n\}\) such that
Then, there is a non decreasing sequence \(m_{k} \subset {\mathbb {N}}\) such that \(m_{k} \rightarrow +\infty \) as \(k \rightarrow +\infty ,\) and meet the following requirements for numbers \(k \in {\mathbb {N}}{:}\)
Indeed, \(m_{k} = \max \{ j \le k: p_{j} \le p_{j+1} \}.\)
Next, we list some of the important identities that were used to prove the convergence analysis.
Lemma 2.4
[3] For any \(y_{1}, y_{2} \in {\mathcal {X}}\) and \(\ell \in {\mathbb {R}}.\) Then, the following inequalities hold:
-
(i)
$$\begin{aligned} \Vert \ell y_{1} + (1 - \ell ) y_{2} \Vert ^{2} = \ell \Vert y_{1}\Vert ^{2} + (1 - \ell )\Vert y_{2} \Vert ^{2} - \ell (1 - \ell )\Vert y_{1} - y_{2}\Vert ^{2}. \end{aligned}$$
-
(ii)
$$\begin{aligned} \Vert y_{1} + y_{2} \Vert ^{2} \le \Vert y_{1}\Vert ^{2} + 2 \langle y_{2}, y_{1} + y_{2} \rangle . \end{aligned}$$
Lemma 2.5
[23] Assume that \({\mathcal {S}} : {\mathcal {D}} \rightarrow {\mathcal {X}}\) is a pseudomonotone and continuous operator. Then, \(u^{*}\) is a solution to the problem (VIP) if and only if \(u^{*}\) is a solution to the following problem :
3 Main results
To investigate the convergence analysis, it is considered that the following requirements are satisfied:
(\({\mathcal {S}}1\)) A solution set of problem (VIP) is denoted by \(\Pi \) and it is non-empty;
(\({\mathcal {S}}2\)) An operator \({\mathcal {S}} : {\mathcal {X}} \rightarrow {\mathcal {X}}\) is said to be pseudomonotone if
(\({\mathcal {S}}3\)) An operator \({\mathcal {S}} : {\mathcal {X}} \rightarrow {\mathcal {X}}\) is said to be Lipschitz continuous with constant \(L >0\) if there exists \(L >0\) such that
(\({\mathcal {S}}4\)) An operator \({\mathcal {S}} : {\mathcal {X}} \rightarrow {\mathcal {X}}\) is said to be sequentially weakly continuous if \(\{{\mathcal {S}}(u_{n})\}\) converges weakly to \({\mathcal {S}}(u)\) for every sequence \(\{u_{n}\}\) converges weakly to u.
The main algorithm is given the following form:

Lemma 3.1
Assume that \({\mathcal {S}} : {\mathcal {X}} \rightarrow {\mathcal {X}}\) satisfies the conditions (\({\mathcal {S}}1\))–(\({\mathcal {S}}4\)). For a given \(u^{*} \in \Pi \ne \emptyset ,\) we have
Proof
First consider the following
It is given that \(u^{*} \in \Pi \subset {\mathcal {D}}\) such that
which implies that
By the use of expressions (3) and (5), we obtain
By given that \(u^{*}\) is the solution of problem (VIP), we have
Due to the pseudomonotonicity of \({\mathcal {S}}\) on \({\mathcal {D}}\), we get
By substituting \(y = y_{n} \in {\mathcal {D}},\) we get
Thus, we have
By the use of expressions (6) and (7), we obtain
It is given that \(u_{n+1} = P_{{\mathcal {D}}} [t_{n} - \tau {\mathcal {S}}(y_{n})]\), we have
Combining expressions (8) and (9), we obtain
\(\square \)
Theorem 3.2
Let \(\{u_{n}\}\) be a sequence generated by Algorithm 1 and satisfies the conditions (\({\mathcal {S}}1\))-(\({\mathcal {S}}4\)). Moreover, choose \(\{\psi _{n}\} \subset (0, 1)\) meet the conditions, i.e.,
Then, \(\{u_{n}\}\) strongly converges to \(u^{*} \in \Pi .\) Moreover, \(P_{\Pi } (0) = u^{*}.\)
Proof
It is given in expression (2) that
By the use of definition of \(\{t_{n}\}\) and inequality (11), we obtain
where
By the use of Lemma 3.1, we obtain
Combining (13) with (14), we obtain
Thus, we conclude that the \(\{u_{n}\}\) is bounded sequence. Indeed, by (13) we have
for some \(M_{2} > 0.\) Combining the expressions (10) with (16), we have
Due to the Lipschitz-continuity and pseudomonotonicity of \({\mathcal {S}}\) implies that the solution set \(\Pi \) is a closed and convex set. It is given that \(u^{*} = P_{\Pi }(0)\) and using Lemma 2.1(ii), we have
The remainder of the facts shall be split into the following two parts:
Case 1: Now consider that a fixed number \(N_{1} \in {\mathbb {N}}\) such that
Thus, above implies that \(\lim _{n \rightarrow +\infty } \Vert u_{n} - u^{*}\Vert \) exists and let \(\lim _{n \rightarrow +\infty } \Vert u_{n} - u^{*}\Vert = l\), for some \(l \ge 0.\) From the expression (17), we have
Due to existence of a limit of sequence \(\Vert u_{n} - u^{*}\Vert \) and \(\psi _{n} \rightarrow 0\), we infer that
By the use of expression (21), we have
Next, we will evaluate
The above provides that
The above explanation guarantees that the sequences \(\{t_{n}\}\) and \(\{y_{n}\}\) are also bounded. By the use of reflexivity of \({\mathcal {X}}\) and the boundedness of \(\{u_{n}\}\) guarantees that there exits a subsequence \(\{u_{n_{k}}\}\) in order that \(\{u_{n_{k}}\} \rightharpoonup {\hat{u}} \in {\mathcal {X}}\) as \(k \rightarrow +\infty .\) Next, we have to prove that \({\hat{u}} \in \Pi .\) This is provided that \(y_{n_{k}} = P_{{\mathcal {D}}}[t_{n_{k}} - \tau {\mathcal {S}}(t_{n_{k}})]\) that is equivalent to
The above inequality implies that
Thus, we shall obtain
Due to boundedness of the sequence \(\{t_{n_{k}}\}\) implies that \(\{{\mathcal {S}}(t_{n_{k}})\}\) is also bounded. By the use of \(\lim _{k \rightarrow \infty } \Vert t_{n_{k}} - y_{n_{k}} \Vert = 0\) and \(k \rightarrow \infty \) in (27), we obtain
Moreover, we have
Since \(\lim _{k \rightarrow \infty } \Vert t_{n_{k}} - y_{n_{k}} \Vert = 0\) and \({\mathcal {S}}\) is L-Lipschitz continuous on \({\mathcal {X}}\) implies that
which together with (29) and (30), we obtain
Let consider a sequence of positive numbers \(\{\epsilon _{k}\}\) that is decreasing and converge to zero. For each k, we denote \(m_{k}\) by the smallest positive integer such that
Due to \(\{\epsilon _{k}\}\) is decreasing and \(\{m_{k}\}\) is increasing.
Case I: If there is a \(t_{n_{m_{k_{j}}}}\) subsequence of \(t_{n_{m_{k}}}\) such that \({\mathcal {S}}(t_{n_{m_{k_{j}}}}) = 0\) (\(\forall j\)). Let \(j \rightarrow \infty ,\) we obtain
Hence \({\hat{u}} \in {\mathcal {D}}\), therefore we obtain \({\hat{u}} \in \Pi \).
Case II: If there exits \(N_{0} \in {\mathbb {N}}\) such that for all \(n_{m_{k}} \ge N_{0}\), \({\mathcal {S}}(t_{n_{m_{k}}}) \ne 0.\) Consider that
Due to the above definition, we obtain
Moreover, expressions (32) and (35), for all \(n_{m_{k}} \ge N_{0},\) we have
Due to the pseudomonotonicity of \({\mathcal {S}}\) for \(n_{m_{k}} \ge N_{0},\)
For all \(n_{m_{k}} \ge N_{0},\) we have
Due to \(\{t_{n_{k}}\}\) weakly converges to \({\hat{u}} \in {\mathcal {D}}\) through \({\mathcal {S}}\) is sequentially weakly continuous on the set \({\mathcal {D}}\), we get \(\{{\mathcal {S}}(t_{n_{k}})\}\) weakly converges to \({\mathcal {S}}({\hat{u}}).\) Suppose that \({\mathcal {S}}({\hat{u}}) \ne 0\), we have
Since \(\{t_{n_{m_{k}}}\} \subset \{t_{n_{k}}\}\) and \(\lim _{k \rightarrow \infty } \epsilon _{k} = 0,\) we have
Next, consider \(k \rightarrow \infty \) in (38), we obtain
By the use of Minty Lemma 2.5, we infer \({\hat{u}} \in \Pi .\) Next, we have
By the use of \(\lim _{n \rightarrow +\infty } \big \Vert u_{n+1} - u_{n} \big \Vert = 0\). Therefore, (42) implies that
Consider the expression (12), we have
From expressions (14) and (44), we obtain
By the use of (22), (43), (45) and applying Lemma 2.2, conclude that \(\lim _{n \rightarrow +\infty } \big \Vert u_{n} - u^{*} \big \Vert = 0\).
Case 2: Suppose there is one \(\{n_{i}\}\) subsequence of \(\{n\}\) such that
Using Lemma 2.3, there exists a sequence \(\{m_{k}\} \subset {\mathbb {N}}\) as \(\{m_{k}\} \rightarrow +\infty \) such that
As in Case 1, the relation (20) gives that
Due to \(\psi _{m_{k}} \rightarrow 0\), we deduce the following:
It follows that
Next, evaluate
This follows that
Using the same explanation as in the Case 1, such that
Using the expressions (45) and (46), we get
Thus, above implies that
Since \(\psi _{m_{k}} \rightarrow 0,\) and \(\big \Vert u_{m_{k}} - u^{*} \big \Vert \) is a bounded. Therefore, expressions (52) and (54) implies that
This means that
As a consequence \(u_{n} \rightarrow u^{*}.\) This is going to conclude the proof of the theorem. \(\square \)
The second projection in Algorithm 1 is substituted with half-space to minimize computing cost, as inspired by Algorithm 4.1 in the paper [4]. The second main algorithm is written as follows:





4 Numerical illustrations
This section discusses two numerical tests to explain the efficacy of the proposed algorithms. All these numerical studies give a detailed understanding of how better control parameters can be chosen. Each of them shows the advantages of the proposed methods relative to the existing ones in the literature.
Example 4.1
First consider the HpHard problem which is taken from [7]. This example has been considered by many people for experimental test (see, [5, 8, 21]). A operator \({\mathcal {S}} : {\mathbb {R}}^{m} \rightarrow {\mathbb {R}}^{m}\) is defined by
with \(q \in {\mathbb {R}}^{m}\) and
In above definition, we take \(N = \hbox {rand}(m)\) to be a random matrix and \(B = 0.5 K - 0.5 K^{\mathrm{T}}\) to be a skew-symmetric matrix with \(K = \hbox {rand}(m)\) and \(D = \hbox {diag}(\hbox {rand}(m,1))\) is a diagonal matrix. The set \({\mathcal {D}}\) is taken as follows:
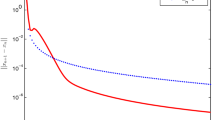
where \(Q = \hbox {rand}(100,m)\) and \(b = \hbox {rand}(100,1)\). It is obvious that \({\mathcal {S}}\) is monotone and that Lipschitz is continuous by \(L = \Vert M\Vert .\) The starting point for this experiment are \(u_{0} = u_{1}= (1, 1, \ldots , 1).\) The numerical consequences of these methods are seen in Figs. 1, 2, 3 and 4 and Tables 1 and 8. The control requirement shall be taken as follows:
(1) Algorithm 1 in [16] (shortly, Algorithm A): \( \tau = \frac{0.7}{L}, D_{n} = \Vert u_{n} - y_{n}\Vert \le 10^{-4}; \)
(2) Algorithm 3.1 in [1] (shortly, Algorithm B): \( \alpha = 0.60, \tau = \frac{0.7}{L}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n+2)}, \theta _{n} = \frac{5}{10}(1 - \psi _{n}), D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(3) Algorithm 3.1 in [27] (shortly, Algorithm C): \( \alpha = 0.60, \tau = \frac{0.7}{L}, \psi _{n} = \frac{1}{(n+2)}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, f(u) = \frac{u}{3}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(4) Algorithm 1 (shortly, Algorithm D): \( \tau = \frac{0.7}{L}, \alpha = 0.60, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n + 2)}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}\) (Table 2).
Example 4.2
Consider the non-linear complementarity problem of Kojima–Shindo where the operator \({\mathcal {S}} : {\mathbb {R}}^{4} \rightarrow {\mathbb {R}}^{4}\) is described by
Moreover, the feasible set \({\mathcal {D}}\) is defined by
It is clear to see that \({\mathcal {S}}\) is not monotone on the set \({\mathcal {D}}.\) By the use of Monte-Carlo technique [9], it can be shown that \({\mathcal {S}}\) is pseudo-monotone on \({\mathcal {D}}.\) There exits a unique solution \(u^*=(5,5,5,5)^{T}\) for given problem. The starting point for this experiment are \(u_{0} = u_{1}= (1, 1, \ldots , 1)\) and \(D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-3}.\) The numerical consequences of these methods are seen in Tables 3, 4, 5 and 6. The control requirement shall be taken as follows: (1) Algorithm 1 in [16] (shortly, Algorithm A): \( \tau = \frac{0.7}{L}, D_{n} = \Vert u_{n} - y_{n}\Vert \le 10^{-4}; \)
(2) Algorithm 3.1 in [1] (shortly, Algorithm B): \( \alpha = 0.60, \tau = \frac{0.7}{L}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n+2)}, \theta _{n} = \frac{5}{10}(1 - \psi _{n}), D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(3) Algorithm 3.1 in [27] (shortly, Algorithm C): \( \alpha = 0.60, \tau = \frac{0.7}{L}, \psi _{n} = \frac{1}{(n+2)}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, f(u) = \frac{u}{3}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(4) Algorithm 1 (shortly, Algorithm D): \( \tau = \frac{0.7}{L}, \alpha = 0.60, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n + 2)}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}. \)
Example 4.3
Let \({\mathcal {X}} = l_{2}\) be a real Hilbert space with the sequences of real numbers satisfying the following condition
Assume that a mapping \({\mathcal {S}}: {\mathcal {D}} \rightarrow {\mathcal {D}}\) is defined by
where \({\mathcal {D}} = \{ u \in {\mathcal {X}} : \Vert u\Vert \le 3 \}.\) We can easily see that \({\mathcal {S}}\) is weakly sequentially continuous on \({\mathcal {X}}\) and the solution set is \(VI({\mathcal {D}}, {\mathcal {S}}) = \{0\}.\) Moreover, \({\mathcal {S}}\) is L-Lipschitz continuous with \(L=11.\) The mapping \({\mathcal {S}}\) is pseudomonotone on \({\mathcal {D}}\) but not monotone (see for more details [33]). Let considered the following projection formula:
The numerical consequences of these methods are seen in Figs. 5, 6, 7 and 8 and Table 7. The control requirement shall be taken as follows:




(1) Algorithm 1 in [16] (shortly, Algorithm A): \( \tau = \frac{0.8}{L}, D_{n} = \Vert u_{n} - y_{n}\Vert \le 10^{-4}; \)
(2) Algorithm 3.1 in [1] (shortly, Algorithm B): \( \alpha = 0.70, \tau = \frac{0.8}{L}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n+2)}, \theta _{n} = \frac{5}{10}(1 - \psi _{n}), D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(3) Algorithm 3.1 in [27] (shortly, Algorithm C): \( \alpha = 0.70, \tau = \frac{0.8}{L}, \psi _{n} = \frac{1}{(n+2)}, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, f(u) = \frac{u}{3}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}; \)
(4) Algorithm 1 (shortly, Algorithm D): \( \tau = \frac{0.8}{L}, \alpha = 0.70, \epsilon _{n} = \frac{1}{(n + 1)^{2}}, \psi _{n} = \frac{1}{(n + 2)}, D_{n} = \Vert t_{n} - y_{n}\Vert \le 10^{-4}\) (Table 8).
References
Anh, P.K.; Thong, D.V.; Vinh, N.T.: Improved inertial extragradient methods for solving pseudo-monotone variational inequalities. Optimization 71, 505–528 (2020)
Antipin, A.S.: On a method for convex programs using a symmetrical modification of the Lagrange function. Ekonomika i Matematicheskie Metody 12, 1164–1173 (1976)
Bauschke, H.H.; Combettes, P.L.; et al.: Convex Analysis and Monotone Operator Theory in Hilbert Spaces, vol. 408. Springer, Berlin (2011)
Censor, Y.; Gibali, A.; Reich, S.: The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 148, 318–335 (2010)
Dong, Q.L.; Cho, Y.J.; Zhong, L.L.; Rassias, T.M.: Inertial projection and contraction algorithms for variational inequalities. J. Glob. Optim. 70, 687–704 (2017)
Elliott, C.M.: Variational and quasivariational inequalities applications to free-boundary ProbLems (Claudio Baiocchi and António Capelo). SIAM Rev. 29, 314–315 (1987)
Harker, P.T.; Pang, J.-S.: For the Linear Complementarity Problem, Computational Solution of Nonlinear Systems of Equations, vol. 26, p. 265 (1990)
Hieu, D.V.; Anh, P.K.; Muu, L.D.: Modified hybrid projection methods for finding common solutions to variational inequality problems. Comput. Optim. Appl. 66, 75–96 (2016)
Hu, X.; Wang, J.: Solving pseudomonotone variational inequalities and pseudoconvex optimization problems using the projection neural network. IEEE Trans. Neural Netw. 17, 1487–1499 (2006)
Iusem, A.N.; Svaiter, B.F.: A variant of Korpelevich’s method for variational inequalities with a new search strategy. Optimization 42, 309–321 (1997)
Kassay, G.; Kolumbán, J.; Páles, Z.: On Nash stationary points. Publicationes Mathematicae 54, 267–279 (1999)
Kassay, G.; Kolumbán, J.; Páles, Z.: Factorization of Minty and Stampacchia variational inequality systems. Eur. J. Oper. Res. 143, 377–389 (2002)
Kinderlehrer, D.; Stampacchia, G.: An Introduction to Variational Inequalities and Their Applications. Bull. Amer. Math. Soc. 7, 622–627 (2000)
Konnov, I.: Equilibrium Models and Variational Inequalities, vol. 210. Elsevier, Amsterdam (2007)
Konnov, I.V.: On systems of variational inequalities. Russ. Math. C/C Izv.-Vyss. Uchebnye Zaved. Mat. 41, 77–86 (1997)
Korpelevich, G.: The extragradient method for finding saddle points and other problems. Matecon 12, 747–756 (1976)
Maingé, P.-E.: Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set Valued Anal. 16, 899–912 (2008)
Nagurney, A.: Network economics: A variational inequality approach. Kluwer Academic Publishers (1999)
Noor, M.A.: Some iterative methods for nonconvex variational inequalities. Comput. Math. Model. 21, 97–108 (2010)
Polyak, B.: Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 4, 1–17 (1964)
Solodov, M.V.; Svaiter, B.F.: A new projection method for variational inequality problems. SIAM J. Control Optim. 37, 765–776 (1999)
Stampacchia, G.: Formes bilinéaires coercitives sur les ensembles convexes. Comptes Rendus Hebdomadaires Des Seances De L Academie Des Sciences 258, 4413 (1964)
Takahashi, W.: Nonlinear Functional Analysis: Fixed Point Theory and its Applications, Yokohama Publishers, Yokohama (2000)
Takahashi, W.: Introduction to Nonlinear and Convex Analysis. Yokohama Publishers, Yokohama (2009)
Thong, D.V.; Hieu, D.V.: Modified subgradient extragradient method for variational inequality problems. Numer. Algorithms 79, 597–610 (2017)
Thong, D.V.; Hieu, D.V.: Weak and strong convergence theorems for variational inequality problems. Numer. Algorithms 78, 1045–1060 (2017)
Thong, D.V.; Vinh, N.T.; Cho, Y.J.: A strong convergence theorem for Tseng’s extragradient method for solving variational inequality problems. Optim. Lett. 14, 1157–1175 (2019)
Tseng, P.: A modified forward–backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 38, 431–446 (2000)
Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J.: The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 39, Article ID 100, 26 page (2020)
Rehman, H.; Kumam, P.; Argyros, I.K.; Alreshidi, N.A.; Kumam, W.; Jirakitpuwapat, W.: A self-adaptive extra-gradient methods for a family of pseudomonotone equilibrium programming with application in different classes of variational inequality problems. Symmetry 12, 523 (2020)
Rehman, H.; Kumam, P.; Argyros, I.K.; Deebani, W.; Kumam, W.: Inertial extra-gradient method for solving a family of strongly pseudomonotone equilibrium problems in real Hilbert spaces with application in variational inequality problem. Symmetry 12, 503 (2020)
Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P.: Weak convergence of explicit extragradient algorithms for solving equilibrium problems. J. Inequal. Appl. 2019, Article ID 282, 25 pages (2019)
Rehman, H.; Kumam, P.; Je Cho, Y.; Suleiman, Y.I.; Kumam, W.: Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optim. Methods Softw. 36, 82–113 (2021)
Rehman, H.; Kumam, P.; Kumam, W.; Shutaywi, M.; Jirakitpuwapat, W.: The inertial sub-gradient extra-gradient method for a class of pseudo-monotone equilibrium problems. Symmetry 12, 463 (2020)
Xu, H.-K.: Another control condition in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 65, 109–113 (2002)
Zhang, L.; Fang, C.; Chen, S.: An inertial subgradient-type method for solving single-valued variational inequalities and fixed point problems. Numer. Algorithms 79, 941–956 (2018)
Acknowledgements
The authors are also grateful to anonymous editor and reviewers for their potential reviews and insightful comments that have greatly improved on the quality of presentation of the current paper.
Funding
The first author was partially financial supported by Phetchabun Rajabhat University (Grant no. 4120758). The fourth author was supported by University of Phayao and Thailand Science Research and Innovation Grant no. FF65-UoE001.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Noinakorn, S., Wairojjana, N., Pakkaranang, N. et al. A novel accelerated extragradient algorithm to solve pseudomonotone variational inequalities. Arab. J. Math. 12, 201–218 (2023). https://doi.org/10.1007/s40065-022-00400-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40065-022-00400-1