
Abstract
Fractional calculus is an important mathematical tool that is widely used in control systems. It is established in the literature that fractional order models are more accurate and more effective in system modelling. In this study, an alternative and novel technique is proposed to identify the fractional order time-delayed model of an unknown system. The method is based on obtaining the approximate stability boundary locus (SBL) curve of the unknown system by applying three different experimental tests. Three points on the SBL curve are determined by the experimental tests and then the parameters of the fractional order time-delayed model are computed by solving the nonlinear systems of equation. The system model with double fractional order element plus a time delay is obtained using the proposed method. The proposed method is explained through simulations on a twin rotor system. The proposed method is also used in model order reduction calculation of the higher order transfer functions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Model identification of a physical system is the first step into system analysis. The performance of a model depends on the system quality and the robustness. Therefore, a well-defined system model is very important for high performance control system designs and applications [1]. The system identification involves defining dynamic behavior of a model with mathematical relations using input/output measurements. A simple system is three-fold: input, system dynamics, and output. Behavior of a system depends on system input and output [2].
Fractional order analysis remained as a mathematical concept for centuries. There have been many different points of views for the fractional order analysis [3,4,5]. Interests in fractional order computations have been increasing due to advances in computer technologies, resulting in numerous articles in the field in recent years. It has been used in many fields such as engineering, chemistry, physics and mechanics [6, 7]. Especially in the field of engineering, it makes a name for itself with its use in control theory. In the last thirty years, there have been many studies on frequency analysis of fractional order systems, time domain analysis, stability analysis, controller designs, and system modeling in the field of control theory [6, 8,9,10,11,12,13,14,15,16]. The importance of Laplace transforms, and inverse Laplace transforms in the analysis and design of integer order control systems is well known. This is because it is simpler and more convenient to analyze control structures in the frequency domain. It is also very favorable for the analysis and design of fractional order control systems. Fatoorehchi and Rach presented a new method for obtaining the inverse Laplace transformations of integer and fractional control systems [17].
Fractional order modeling is one of the methods that can accurately represent the dynamic behavior of a system. These types of models contain one or more non-integer order derivative operators, unlike the commonly used integer order models, \(s^{\upsilon }\), \(\upsilon \in R\) [18]. Several techniques have also been developed for some basic fractional order model structures that allow users to easily design controllers [19]. Moreover, fractional models are known to characterize systems more accurately [20, 21]. There are many studies on modelling of fractional order systems in literature. Some of these studies include use of CRONE, FOTF and FOMCON fractional order application tools working on MATLAB program [22], use of optimization on a time-delayed model with one fractional order parameter [23], use of algorithm that determines system model parameters [24]. Fractional modeling of a heat transfer system is studied in [25]. Advances in time-domain system identification using fractional models is presented in [26] and an application on a thermal system is presented as an example. Also, achievements of fractional models in describing systems in the time domain is discussed in [27].
This study aims to describe the mathematical model of a system with double fractional element plus time delay. The proposed method can determine the fractional order time-delayed model of a system with unknown model by using the SBL method. The method uses three experimental test data for calculations. Moreover, the proposed method can reduce high order transfer functions to fractional low order.
This study is organized as follows: In Sect. 2, the definition of fractional order systems and the fractional order model structure used in this study are explained. In Sect. 3, the SBL equations for the fractional order transfer functions with time-delayed are given. In Sect. 4, the methodology of the proposed method is explained. In Sect. 5, the numerical examples on model identification of a TRMS system and model order reduction calculations of higher order transfer functions are presented. The results are given in Sect. 6.
2 Fractional Order Model
Systems expressed by differential equations in which orders of derivatives can be any real number, not necessarily integers, are called fractional order systems. The fractional order modeling is more accurate and more efficient than the integer order classical modeling in real-world systems [20, 21]. Few examples of fractional order systems include electromechanical systems, long transmission lines, dielectric polarizations, cardiac behaviors, bioengineering problems, and chaos [6, 7].
Fractional order differential equations are generalized forms of classical integer order differential equations. Many mathematicians have contributed to fractional calculus. There are different definitions for the fractional order differential equations some of which are given by Grünwald-Letnikov, Riemann–Liouville, and Caputo. The Laplace transform of Caputo derivative is given in Eq. (1) [8].
here \(D^{\alpha } y(t) = d^{\alpha } y(t)/dt^{\alpha }\) specifies the Caputo derivative of \(y(t)\), \(\alpha \in R_{ + }\) is a rational number. The \([\alpha ]\) denotes the integer part of \(\alpha\) and \(L\) is the Laplace transform operator.
A fractional control system with \(r(t)\) input and \(y(t)\) output is defined by a fractional differential equation form given in Eq. (2).
Equation (2) can be written in the form of transfer function as seen in Eq. (3) using Laplace transform. Thus, transfer functions with fractional powers of operator \(s\) are called fractional order transfer functions (FOTF).
The transfer function with double fractional element plus time delay given in Eq. (4) can characterize many real-world systems. Where, \(K_{m}\) is dc gain, \(p,\;q\) are the constants, \(\alpha\), \(\beta\) are the fractional orders and \(\theta\) is the time delay. Fractional order models of many systems can be obtained by the general transfer function \(G_{m} (s)\) given in Eq. (4). There is also a controller design method in the literature for the transfer functions in this form [19, 28]. Therefore, modeling systems in this form makes controller designs easier and accessible.
3 SBL Method for Fractional Order Models with Time Delay
Consider the transfer function of a PI controller given in the form of \(C(s) = k_{p} + \frac{{k_{i} }}{s}\) and a fractional order plant transfer function with time delay expressed in the form of \(G_{m} (s) = \frac{{N_{m} (s)}}{{D_{m} (s)}}e^{ - \theta s}\) in a feedback system, the characteristic equation of this system can be written as
By decomposing the numerator and the denominator polynomials of \(G_{m} (s)\) into their real and imaginary parts, and substituting \(s = j\omega\) and solving characteristic equation by equating the real and the imaginary parts of \(\Delta \,\left( {j\omega } \right)\) to zero, the Eqs. (6) and (7) can be obtained.
where \(N_{mR} (\omega )\) and \(N_{mI} (\omega )\) are real and imaginary parts of the fractional order numerator polynomial respectively. Similarly, the polynomials \(D_{mR} (\omega )\) and \(D_{mI} (\omega )\) are real and imaginary parts of the fractional order denominator polynomial respectively. The \(k_{p} (\omega )\) and \(k_{i} (\omega )\) are calculated from Eqs. (6) and (7) as follows,
Using Eqs. (8) and (9), SBL curve and stability region including all stabilizing \(k_{p} (\omega )\) and \(k_{i} (\omega )\) values can be obtained in the \(\left( {k_{p} ,\;k_{i} } \right)\) plane [29, 30]. SBL is defined in the frequency range \(\omega \in \left[ {0,\infty } \right]\), however, stability region is found to be in \(\omega \in \left[ {0,\;\omega_{c} } \right]\), where \(\omega_{c}\) is the critical frequency.
4 Methodology for Fractional Order Model Identification
A real-world system whose mathematical model is unknown can be expressed as in Fig. 1, where \(r(t)\) is the system input and \(y(t)\) is the system output. The proposed method is based on the determination of the approximate SBL curve of the system. The approximate SBL curve is determined by applying three different experimental tests to the system, which are open loop unit step response test, closed loop system response with relay controller test, and closed loop system with integrator controller test. In the continuation of this study, Test 1 for the step input open loop control system experiment, Test 2 for the relay feedback control system experiment, and Test 3 for the closed loop system experiment with integrator controller will be used.

Block diagram of a basic system
The diagram of the proposed method is given in Fig. 2. The proposed method is based on matching the SBL curves of the transfer function given in Eq. (4). Specified points \(P1\), \(P2\) and \(P3\) on the SBL curve are used in the model identification calculations. These points are determined as a result of the tests applied to the system whose model is unknown. The indicated points can be defined as \(P1\;\left( {k_{p1} ,\;0,\;\omega_{1} } \right)\), \(P2\;\left( {0,\;k_{i2} ,\;\omega_{2} } \right)\) and \(P3\;\left( {k_{p3} ,\;0,\;\omega_{3} } \right)\). The points \(P1\) and \(P3\) are chosen on the \(k_{p}\) axis and the point \(P2\) is chosen on the \(k_{i}\) axis on the SBL curve. As a result of the SBL matching calculations, the system with an unknown model is modeled as Eq. (4).

Block diagram of the SBL matching process
4.1 Calculated Point P1 by using Test 1
In Test 1, the unit step response of the open-loop system given in Fig. 3 is examined. As a result of the test, the output value in the steady state of the system is determined. For example, in an oscillate response, an approximate steady-state output value can be determined by the average of the last two peaks as shown in Fig. 4. However, if the system can be examined until it stabilizes, this value is already directly obtained.

Open-loop control system

Step response of open loop control system for oscillating systems
In Fig. 4, the \(K\) is approximate steady-state output value of the open loop step response. The approximate \(K\) value is calculated as given in Eq. (10).
The \(k_{p1}\) value of the point \(P1\) is calculated with Eq. (11) using the \(K\) value. Also, \(k_{i1} = 0\) and \(\omega_{1} = 0\;rad/\sec\) at point \(P1\).
4.2 Calculated Point P3 by Using Test 2
The second test, the experimental model of the relay feedback control system, is given in Fig. 5. A dead-band relay is used for this test. The relay tests are effective solution methods for the critical gain and the critical frequency calculations. The definition function of the relay with dead-band is given in Eq. (12), where, \(h\) and \(\delta\) are parameters of relay with dead band [8, 31]. The oscillating system output resulting from the test is given in Fig. 6, in which PV is the process value, \(T\) is the period of the oscillation and \(a\) is the amplitude of the oscillating signal.

Relay feedback closed loop control system

Response of relay feedback closed loop control system
As a result of the relay test, the angular frequency \(\omega_{3}\) of point \(P3\) is approximately \(\omega_{c}\) and \(k_{p3}\) is approximately equal to \(N(a)\). The formulas for these values are given in Eqs. (13) and (14), respectively. Also, \(k_{i3} = 0\) at \(P3\).
4.3 Calculated Point P2 by Using Test 3
In the Test 3, experimental model given in Fig. 7 is used to determine the \(k_{i2}\) value. Along with \(k_{p2} = 0\), the \(k_{i2}\) value that leads the system output to oscillation, and the \(\omega_{2}\) angular frequency are determined with Test 3. Thus, the point \(P2\) is determined.

Closed loop control system with integrator controller
4.4 Determination of SBL Equations and Model Parameters
When \(G_{m} (s)\) is considered in Eqs. (8) and (9), the \(k_{p} (\omega )\) and \(k_{i} (\omega )\) equations are parametrically obtained as Eqs. (15) and (16), respectively.
By performing trigonometric transformations, Eqs. (26) and (27) are obtained simply as follows.
The values of the points \(P1\), \(P2\), and \(P3\) are used in the solution of the nonlinear equations given in Eqs. (17) and (18). As a result of this solution, the \(p,\;q,\;\alpha ,\;\beta ,\;\theta\) and \(K_{m}\) parameters of \(G_{m} (s)\) are determined. Thus, the fractional order model with time-delay of the unknown system is obtained. The outline of the method can be expressed step by step as follows.
Step 1: Apply Test 1.
Step 2: The point \(P1\;\left( {k_{p1} ,\;0,\;\omega_{1} } \right)\) is determined from Test 1.
Step 3: Apply Test 2.
Step 4: The point \(P3\;\left( {k_{p3} ,\;0,\;\omega_{3} } \right)\) is determined from Test 2.
Step 5: Apply Test 3.
Step 6: The Point \(P2\;\left( {0,\;k_{i2} ,\;\omega_{2} } \right)\) is determined from Test 3.
Step 7: The nonlinear \(k_{p} (\omega )\) or \(k_{i} (\omega )\) equation systems are solved by using fsolve command in Matlab or analytically by the “Adomian” decomposition method (ADM) [32,33,34] and the \(p,\;q,\;\alpha ,\;\beta ,\;\theta\) and \(K_{m}\) parameters of \(G_{m} (s)\) are determined. With the procedure presented above, the fractional order model with time-delay of an unknown system is experimentally obtained. Moreover, the proposed method also provides reduced order of the transfer functions for the higher order fractional or integer transfer function, whose models is known.
5 Numerical Examples
In this section, examples for model identification and model order reduction are discussed.
Example 1
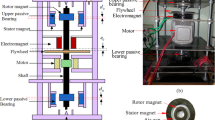
The TRMS system given in Fig. 8 is considered for model identification.

Test 1 for black box of TRMS system
The TRMS system includes elevation (pitch) and azimuth (yaw) models. In the example, fractional order models are obtained by using proposed experimental technique for both elevation and azimuth.
As a result of the Test 1 on TRMS system, step responses for pitch and yaw are plotted until the system is steady state. The step responses for pitch and yaw are shown in Fig. 9., respectively.

Unit step responses of open loop control system for Test 1
In the open-loop step response of pitch and yaw, the steady-state output \(K\) is obtained as 0.490014 for pitch and 1.0284 for yaw in the Fig. 9. Thus, \(k_{p1}\) values are computed using Eq. (11). The point \(P1\) is determined as \(P1\;( - 2.0408,\;0,\;0)\) for pitch and \(P1\;( - 0.9724,\;0,\;0)\) for yaw. For the \(P3\) point, the Test 2 given in Fig. 10 is applied. The output of relay feedback control system is plotted as Fig. 11. The elements of \(P3\), \(\omega_{3}\) and \(k_{p3}\) are computed using Fig. 11.

The closed loop control system model with relay controller of TRMS for Test 2

Closed-loop system response using Test 2
In Fig. 11., on the output of pitch, \(T1_{p} = 491.813\) sec, \(T2_{p} = 494.955\) sec, \(a_{p} = 2.9334\) are easily determined. Using these data, the angular frequency, and the cutoff point of the real axis for pitch are calculated as in Eq. (19).
In Fig. 11., on the output of yaw, \(T1_{y} = 483.170\) sec, \(T2_{y} = 493.113\) sec and \(a_{y} = 3.7938\) are easily determined. Using these data, the angular frequency, and the cutoff point of the real axis for pitch are calculated as in Eq. (20).
Thus, the point \(P3\) are determined as \(P3\;\left( {0.4080,\;0,\;2} \right)\) for pitch and \(P3\;\left( {0.3237,\;0,\;0.6319} \right)\) for yaw. Using the experimental model given in Fig. 12, the values of \(k_{i2}\), which leads the system to oscillation, are determined as 0.907 for pitch and 0.075 for yaw. The oscillating output of Test 3 is given in Fig. 13, where the critical frequencies of pitch and yaw are obtained as \(\omega_{2} = 1.8244\;rad/\sec\) and \(\omega_{2} = 0.5477\;rad/\sec\), respectively.

Closed loop control system model with integrator controller of TRMS for Test 3

Closed-loop system response as a result of Test 3
As a result of all experimental tests, the points of \(P1\;\left( { - 2.0408,\;0,\;0} \right)\), \(P2\;\left( {0,\;0.907,\;1.8244} \right)\) and \(P3\;\left( {0.4080,\;0,\;2} \right)\) are obtained for pitch model and the points of \(P1\;\left( { - 0.9724,\;0,\;0} \right)\), \(P2\;\left( {0,\;0.075,\;0.5477} \right)\) and \(P3\left( {0.3237,\;0,\;0.6319} \right)\) are obtained for yaw model. By substituting these three points in Eqs. (17) or (18), the nonlinear system of equations is obtained. The system of equations is solved by appropriate initial values using fsolve command in Matlab environment or can be solved analytically by ADM. The model transfer functions for pitch with four different initial values are computed in Eq. (21). In addition, the SBL curves of these transfer functions are given in Fig. 14.

SBL curves of approximate fractional order models computed using the tests for pitch
The open loop step responses of model transfer functions and black box for pitch are given in Fig. 15. Error curves of model transfer functions according to black box for pitch are given in Fig. 16. Thus, the root mean square errors of the models for pitch are computed as 0.0066, 0.0085, 0.0119 and 0.0164, respectively. As can be seen, the responses that best follows black box among the model transfer functions is \(G_{m1} (s)\), which has the lowest error margin. Among the solutions, \(G_{m1} (s)\) should be preferred as the pitch transfer function model.

The unit step responses of TRMS (Black Box) and the approximate fractional order models computed using the tests for pitch

The error margin of the step responses of the approximate fractional order models computed using the tests according to TRMS (Black Box) for pitch
The calculation procedure for pitch is applied in the same way for yaw. The model transfer functions for yaw with four different initial values are computed in Eq. (22). In addition, the SBL curves of these transfer functions are given in Fig. 17.

SBL curves of approximate fractional order models computed using the tests for yaw
The open loop step responses of model transfer functions and black box for yaw are given in Fig. 18. Error curves of the model transfer functions according to Black Box for yaw are given in Fig. 19. Thus, the root mean square errors of the models for yaw are computed as 0.0206, 0.0246, 0.0286 and 0.0380, respectively. As can be seen, the responses that best follows black box among the model transfer functions is \(G_{m1} (s)\), which has the lowest error margin. Among the solutions, \(G_{m1} (s)\) should be preferred as the yaw transfer function model.

The unit step responses of TRMS (Black Box) and the approximate fractional order models computed using the tests for yaw

The error margin of the step responses of the approximate fractional order models computed using the tests according to TRMS (Black Box) for yaw
Example 2
Consider the transfer function given in Eq. (23) for model order reduction.
The SBL curve of the transfer function given in Eq. (23) is plotted in Fig. 20. According to the proposed method, three points are determined as given in Eq. (24) on the SBL curve. In this example, the model order reduction process over the SBL curve of the known higher order model is applied successfully.

The SBL curve of Eq. (23)
The nonlinear Eqs. (17) and (18), obtained by using these points, are solved with appropriate initial values. Thus, the proposed method produces a model with reduced order transfer function given in Eq. (25). The SBL curves of the original transfer function, given in Eq. (23), and model order reduction transfer functions, given in Eq. (25), are obtained as in Fig. 21. In addition to examining the frequency domain analysis of the two transfer functions, Nyquist diagrams are shown in Fig. 22. In both SBL and Nyquist diagrams, the exact and proposed method curves follow each other closely. Thus, the reduced order transfer function approximately characterizes the original transfer function.

SBL curves obtained with the exact and proposed method (reduced order model)

Nyquist curves of the exact and proposed method (reduced order model)
Example 3:
Consider the fractional order transfer function given in Eq. (26) for model order reduction.
The three points selected over the SBL curve of Eq. (26) are given in Eq. (27). By applying proposed procedure, the model order reduction transfer function is found as in Eq. (28). Thus, the SBL curves of the exact and proposed method are shown in Fig. 23 and the Nyquist curves are shown in Fig. 24. The SBL and Nyquist curves of the reduced order transfer function and the original model are almost similar. The transfer function considered in this example is unstable. One of the important features of the proposed method is that it can be used successfully in unstable transfer functions. Another important part of this example is that the error margin between original and the reduced order transfer function is 0.086 for critical gain.

SBL curves obtained with the exact and proposed method (reduced order model)

Nyquist curves of the exact and proposed method (reduced order model)
6 Conclusion
In this article, the determination of a real-system model using experimental methods and obtaining the model of reduced order transfer function of a known higher order transfer function are discussed. In both procedures, the SBL method was used. The transfer function with double fractional elements and a time-delay is used as the standard model. The purpose of this selection is both the suitability of many real-system models and the availability of controller design methods for the transfer functions in this specified form. In this study, the model of an unknown system was successfully obtained by applying three experimental tests. In Example 1, a model identification simulation of a real TRMS system is presented. It is shown in Examples 1 that the proposed method depicts the model of the TRMS system accurately. Based on this study, an application which has a graphical user interface can be developed to perform the proposed experimental computation in the future. In this way, the fractional order model of a real system can be found automatically. In Examples 2 and 3, the reduced order transfer functions of higher order transfer functions can be easily calculated using the proposed method. The method also gives effective and accurate results for the reduced order model of an unstable higher-order transfer function. It has also been shown that the SBL curves of the reduced order transfer function and the original transfer function are successfully matched in all three examples.
References
Taib, M. N.; Adnan, R.; Rahiman, M. H. F.: Practical System Identification. Shah Alam: faculty of electrical engineering, UiTM. (2007).
Ljung, L.: System Identification: Theory for the User. Wiley, New York (1999)
Miller, K.S.; Ross, B.: An introduction to the fractional calculus and fractional differential equations. Wiley, New York (1993)
Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V.: Fractional-order systems and controls: fundamentals and applications. Springer, London (2010)
Oldham, K.; Spanier, J.: The Fractional Calculus. Academic Press, New York (1974)
Das, S.: Functional fractional calculus for system identification and controls. Springer, Heidelberg (2008)
Xue, D.; Chen, Y.; Atherton, D.P.: Linear feedback control: analysis and design with MATLAB. Society for Industrial and Applied Mathematics, Philadelphia (2007)
Atherton, D.P.; Tan, N.; Yeroglu, C.; Kavuran, G.; Yüce, A.: Limit cycles in nonlinear systems with fractional order plants. Machines 2(3), 176–201 (2014)
Alagoz, B.B.: Hurwitz stability analysis of fractional order LTI systems according to principal characteristic equations. ISA Trans. 70, 7–15 (2017)
Atherton, D.P.; Tan, N.; Yüce, A.: Methods for computing the time response of fractional-order systems. IET Control Theory Appl. 9(6), 817–830 (2014)
Barbosa, R. S.; Machado, J. T.; Ferreira, I. M.:Published, A fractional calculus perspective of PID tuning. Proc. In: ASME 2003 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, pp. 651–659 (2003)
Caponetto, R.; Dongola, G.; Fortuna, L.; Petráš, I.: Fractional order systems: modeling and control applications. World Scientific, Singapore (2010)
Chen, Y.; Petras, I; Vinagre, B.: A list of Laplace and inverse Laplace transforms related to fractional order calculus, pp. 1–3 (2001). http://ivopetras.tripod.com/foc_laplace.pdf
Yüce, A.; Tan, N.; Atherton, D.P.: Fractional order PI controller design for time delay systems. IFAC-PapersOnLine. 49(10), 94–99 (2016)
Yüce, A.; Tan, N.: Inverse laplace transforms of the fractional order transfer functions. In: 11th International Conference on Electrical and Electronics Engineering (ELECO) Bursa, pp. 775–779 (2019)
Yüce, A.; Tan, N.: A new integer order approximation table for fractional order derivative operators. In: The IFAC 2017 World Congress Toulouse, France, pp. 9736–9741 (2017).
Fatoorehchi, H.; Rach, R.: A method for inverting the Laplace transforms of two classes of rational transfer functions in control engineering. Alex. Eng. J. 59(6), 4879–4887 (2020)
Narang, A.; Shah, S.L.; Chen, T.: Continuous-time model identification of fractional-order models with time delays. IET Control Theory Appl. 5(7), 900–912 (2011)
Yumuk, E.; Güzelkaya, M.; Eksin, İ: Analytical fractional PID controller design based on Bode’s ideal transfer function plus time delay. ISA Trans. 91, 196–206 (2019)
Nonnenmacher, T.; Glöckle, W.: A fractional model for mechanical stress relaxation. Philos. Mag. Lett. 64(2), 89–93 (1991)
Westerlund, S.; Ekstam, L.: Capacitor theory. IEEE Trans. Dielectr. Electr. Insul. 1(5), 826–839 (1994)
Ishak, N.; Yusof, N. M.; Rahiman, M. H. F.; Adnan, R.; Tajudin, M.: Published, Identification using fractional-order model: An application overview. In: Proc. 2014 IEEE International Conference on Control System, Computing and Engineering (ICCSCE 2014). IEEE. pp. 668–673 (2014)
Guevara, E.; Meneses, H.; Arrieta, O.; Vilanova, R.; Visioli, A.; Padula, F.: Published, Fractional order model identification: computational optimization. In: Proc. 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA). IEEE. pp. 1–4 (2015)
Fahim, S.M.; Ahmed, S.; Imtiaz, S.A.: Fractional order model identification using the sinusoidal input. ISA Trans. 83, 35–41 (2018)
Gabano, J.-D.; Poinot, T.: Fractional modelling and identification of thermal systems. Signal Process. 91(3), 531–541 (2011)
Malti, R.; Victor, S.; Oustaloup, A.: Advances in system identification using fractional models. J. Comput. Nonlinear Dyn.Comput. Nonlinear Dyn. (2008). https://doi.org/10.1115/1.2833910
Malti, R.; Victor, S. P.; Nicolas, O.; Oustaloup, A.: Published, system identification using fractional models: state of the art. In: Proc. International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 295–304 (2007)
Das, S.; Saha, S.; Das, S.; Gupta, A.: On the selection of tuning methodology of FOPID controllers for the control of higher order processes. ISA Trans. 50(3), 376–388 (2011)
Tan, N.: Computation of stabilizing PI and PID controllers for processes with time delay. ISA Trans. 44(2), 213–223 (2005)
Deniz, F.N.; Alagoz, B.B.; Tan, N.; Atherton, D.P.: An integer order approximation method based on stability boundary locus for fractional order derivative/integrator operators. ISA Trans. 62(2016), 154–163 (2016)
Yüce, A.; Tan, N.; Atherton, D.P.: Limit cycles in relay systems with fractional order plants. Trans. Inst. Meas. Control. 41(15), 4424–4435 (2019)
Fatoorehchi, H.; Rach, R.; Sakhaeinia, H.: Explicit Frost-Kalkwarf type equations for calculation of vapour pressure of liquids from triple to critical point by the Adomian decomposition method. Can. J. Chem. Eng. 95(11), 2199–2208 (2017)
Fatoorehchi, H.; Rach, R.; Tavakoli, O.; Abolghasemi, H.: An efficient numerical scheme to solve a quintic equation of state for supercritical fluids. Chem. Eng. Commun. 202(3), 402–407 (2015)
Ebaid, A.; Rach, R.; El-Zahar, E.: A new analytical solution of the hyperbolic Kepler equation using the Adomian decomposition method. Acta Astronaut. 138, 1–9 (2017)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The Author declares that there is no conflict of interest.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yüce, A. System Identification Based on Experimental Technique Using Stability Boundary Locus Method for Linear Fractional Order Systems. Arab J Sci Eng (2024). https://doi.org/10.1007/s13369-024-09250-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13369-024-09250-9