
Abstract
The use of main battle tanks in armies goes back many years. The most crucial component is undoubtedly the weapon system. In this study, it is aimed to model the elevation dynamics of the weapon system that provides the movement of the weapon system in the vertical axis. The elevation dynamics consists of three parts: an electric motor, a driver, and a barrel. Both parts are expected to have similar vibration characteristics. The linear graph method was preferred as the modeling method. First of all, the system components and types were determined, and the linear graph, normal tree, and tree links of the system were drawn. Then the state variables, primary and secondary variables, as well as the number of branches, nodes, and sources, were determined, respectively. Elemental, continuity, and compatibility equations were written using the obtained graphs. By organizing these equations, state equations were obtained in standard form and matrix form. With the simulation studies carried out in MATLAB/Simulink, the displacement, velocity, and acceleration responses of the breech and muzzle sections were obtained. It is seen that obtained angular displacement, velocity, and acceleration results for both breech and muzzle sections are almost the same. As a result, the breech and muzzle sections have similar vibration motions and have proven to be able to work in harmony. This result shows that the barrel can be designed from two parts without additional stress and tension, which makes it difficult to focus on the target. By forming the barrel in two parts, the risk of damage can be minimized by better distributing the stress and tension occurring in the barrel during firing.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Vehicles are indispensable elements of human life. While the first vehicles produced were generally used to carry people and goods, many types produced for different purposes have emerged over time. Considering today's variety of vehicles, it is possible to classify the concept of vehicles as road vehicles used to transport people and goods in daily life and off-road vehicles used for special purposes [1]. One of the most important examples of off-road vehicles is undoubtedly the main battle tanks used in the military field. Main battle tanks are military vehicles with tracks that allow easy movement on the terrain and a weapon system that provides high firepower [2,3,4,5,6,7,8].
There are dynamics that enable the movement of the main battle tank weapon system in the horizontal and vertical axis. The azimuth dynamics provide the movement in the horizontal axis, and the elevation dynamics provide the movement in the vertical axis [6, 7, 9]. In both azimuth and elevation dynamics, the drive is provided by an electric motor and transmitted to the barrel [5, 7, 9]. It is often seen that the barrel usually consists of two or more parts connected [3,4,5,6,7,8]. The aim is to reduce the risk of damage by better distributing the stress and tension occurring in the barrel. If the parts of the barrel do not vibrate uniformly, the barrel is subjected to additional stress and tension, and it becomes difficult to precisely direct the tip of the barrel to the target. For this reason, it is desired to reach a harmony between these two parts, which yields similar vibration characteristics.
A system is defined as a set of components that are brought together to fulfill a specific purpose. System dynamics is the branch of science that involves obtaining mathematical models of these systems in accordance with their nature and generally observing system responses through simulation studies [10]. Although there are systems consisting of only one of the mechanical, electrical, thermal, pneumatic, or hydraulic components, hybrid systems with more than one component are more common today in parallel with technology development [11,12,13,14,15,16,17,18].
Lagrange method, Newton's second law, D’Alembert’s principle, and Hamilton's principle are frequently used to obtain mathematical models of systems [10,11,12, 19]. In addition to these methods, there are also graphical methods for obtaining mathematical models of systems. These methods are the linear graph method and bond graph method [11, 12, 20].
The linear graph method was first introduced by Leonhard Euler in 1736 [21]. The aim of this method is to determine the common points of the components regardless of their type and to obtain the mathematical model of the system by graphical methods. There are many studies in which many systems such as milling machine [22], planar four-bar mechanism and compound pendulum [23], 2-link manipulator, planar slider-crank mechanism, 3 degrees of freedom planar parallel robot [24], flexible plates [25], robotic bevel-gear train [26], flexible multibody systems [27], mass–spring–damper system and two masses with two absorbers [28], the spinning disk [29], which are composed of mechanical components; electrical network [23], composed of electrical components; engine performance [30], double capacity tank level control system [31], which consist of thermal components; four-wheel skid-steer mobile robot [32], a lead-screw-nut mechanism [33], piezoelectric transducers [34], positioning system [35], conveying system [36], condensator speaker [37], industrial paint pumping system [38], auto-leveling system for vehicle-borne platform [39], electrically driven elevator [21], consisting of electrical and mechanical components; electro-hydraulic servo manipulator [40], consisting of electrical and hydraulic components; U-tube system [41], consisting of thermal and hydraulic components; flow-controlled ramp with a mechanical load [42], consisting of hydraulic and mechanical components; electromechanical battery composed of electrical and chemical components [43].
In this study, the elevation dynamics of the weapon system of the main battle tank were modeled, and vibration characteristics of the parts of the barrel were observed. Elevation dynamics consist of many electrical and mechanical components with different functions. In order to benefit from the similarities between these components, the linear graphic method was used as the modeling method. Each step for the linear graph method is shown in Fig. 1. Obtained state equations are solved by simulation studies performed in MATLAB/Simulink environment. The position, velocity, and acceleration graphs of the breech section and muzzle section, as well as the maximum and RMS position velocity and acceleration values, were compared.

The steps of the linear graph method
2 Material and Method
This study aims to observe the vibration characteristics of the barrel of the weapon system of the main battle tank in the vertical axis. A physical model representing the physical properties and behavior of the system was first created, and how the system works was explained. Afterward, the mathematical model that would define the mathematical properties and behaviors of the system was obtained by the linear graph method. A simulation process was finally performed to observe the behavior of the system. The material method scheme is presented in Fig. 2.

Material and method scheme
2.1 Physical Model
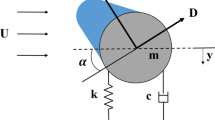
The task of the elevation dynamic, whose schematic diagram is given in Fig. 3a, is to ensure that the weapon system moves on the vertical axis. Figure 3b shows three main parts: the electric motor, the driver, and the barrel (breech section and muzzle section). The propulsion is provided by an electric motor. The resulting torque is transferred to the driver. The driver and pinion are rigidly connected, and their speeds are the same. The movement is transmitted from the driver to the breech section by a pinion rack mechanism. The breech section and muzzle section are hinged to each other [7]. The reaction forces between the components are neglected.

2.2 Mathematical Model
Following the steps of the linear graph method in Fig. 1, how the mathematical model of the system is obtained is explained below step by step.
2.2.1 Identification of System Components and Types
In the linear graphics method, the components are classified independently of their type. Based on the classification in Fig. 4, variable definitions for components of the elevation dynamic are made and presented in Table 1.

Classification of components [11]
In the system seen in Fig. 3b, the source element is the motor voltage. This source provides energy to the system. Motor resistance, motor inductance, driver inertia moment, driver viscous friction, breech section inertia moment, muzzle section inertia moment, viscous friction, and spring, which are determined as passive components, behave in the direction of this energy. In addition, there are two-port elements that allow the transition from electrical system to rotational mechanics, from rotational mechanics to translational mechanics, and from translational mechanics to rotational mechanics. These elements are, respectively, the electromechanical conversion element, the pinion rack mechanism and mechanical conversion element (Table 2).
2.2.2 Drawing the Linear Graph, Normal Tree, and Tree Links of the System
Node points were created by determining the places with the across variable. The linear graph is obtained in Fig. 5 by placing the branches of the one-port and two-port elements between the relevant nodes.

Linear graph
In order to understand whether there is a contradiction in the system model and to prove that the system is modeled correctly, normal tree and tree links need to be drawn. The main idea is to prevent a closed loop form for drawing the normal tree. Based on this idea, the normal tree (Fig. 6a) is derived by involving active-type A components, a maximum number of passive-type A components, a single branch of two-port components, a maximum number of passive-type D components, and a minimum number of passive-type T components. The branches of the linear graph that do not enter the normal tree form the tree links (Fig. 6b).

a Normal tree b tree links
2.2.3 Identification of State, Primary and Secondary Variables
The state variables are the across variables of the passive type A components in the normal tree and the through variables of the passive-type T components in the tree ties. The primary variables are the across variables of the branches in the normal tree, and the through variables of the branches in the tree links, and the secondary variables are the through variables of the branches in the normal tree and the across variables of the branches in the tree links. Table 3 is formed by determining the state variables, primary and secondary variables.
2.2.4 Determination of the Number of Branches, Nodes, and Sources
First, the number of branches, nodes, and sources should be determined. The number of branches is \(B = 16\), the number of nodes is \(N = 9\), and the total number of sources is \(S = 1\) obtained as the number of A-type sources is \(S_{A} = 1\) and the number of T-type sources is \(S_{T} = 0\).
2.2.5 Determination of the Number of Branches, Nodes, and Sources
Obtaining elemental, continuity and compatibility equations: The elemental equation numbered \(B-S\), the continuity equation numbered \(N - 1 - S_{A}\), and the compatibility equations numbered \(B - N + 1 - S_{T}\) should be written for passive components. In this framework, 15 elemental equations, 7 continuity equations, and 8 compatibility equations are presented in Table 4.
2.2.6 Obtaining the State Equations in Standard and Matrix form by Making Necessary Arrangements
First of all, secondary variables in the elemental equations are eliminated by making use of continuity equations and compatibility equations. Then, if the variables that are not state variables are destroyed, and necessary adjustments are made, the state equations are obtained as Eqs. (31–36) in standard form and Eq. (37) in matrix form.
2.3 Simulation Processes
During the simulation process, a Simulink model was created with blocks representing each of the equations of state presented in Eqs. (1–6), and system outputs were obtained versus system input. A schematic diagram of the simulation process is presented in Fig. 7.

Schematic diagram of the simulation process
3 Results and Discussion
Simulation studies were carried out in MATLAB/Simulink environment. The relevant parameters are presented in Table 5 [7, 9]. For V(t), which is the system’s input, the sinusoidal input shown in Fig. 8 is preferred.

System input
When the input is 20 V, as shown in Fig. 9, the results for the breech and muzzle sections are similar. The angular position, velocity, and acceleration of an angular system are characteristic concepts in terms of system dynamics. The similarity of the angular displacement–time responses of the breech and muzzle sections in the present study is consistent with the studies in the literature. Furthermore, the similarity of the angular velocity and acceleration time responses of the breech and muzzle sections provides a broader scope in terms of reflecting all the characteristics in the system dynamics [3, 5, 7]. As seen in Table 6, the maximum angular displacement, maximum angular velocity, and maximum angular acceleration values are 0.017459 rad, 0.004365 rad/s, 0.004009 rad/s2 for the breech section and 0.017459 rad, 0.004365 rad/s, 0.004182 rad/s2 for the muzzle section, respectively. The RMS angular displacement value for the breech section is 0.010718 rad, the RMS angular velocity value is 0.03094 rad/s, and the RMS acceleration value is 0.001542 rad/s2 while the RMS angular displacement value for the muzzle section is 0.010718 rad, the RMS angular velocity value is 0.003094 rad/s, and the RMS acceleration value is 0.001543 rad/s2. Considering all values, it is seen that the maximum and RMS values are almost identical for the breech and muzzle sections.

a Angular displacement b angular velocity c angular acceleration of breech section and muzzle section
4 Conclusion
In this study, the elevation dynamics of the weapon system of the main battle tank are modeled by the linear graph method. First of all, system components and types were determined. The system is expressed graphically by obtaining linear graph, normal tree, and tree links of the system. With the help of this graphical expression, the state equations were obtained in standard and matrix form by following the steps of obtaining the state, primary and secondary variables; determining the number of branches, nodes, and sources; and obtaining the elemental, continuity, and compatibility equations. Simulation studies were carried out in MATLAB/Simulink environment. It was observed that the position, velocity, and acceleration time responses of breech and muzzle sections had similar vibration characteristics and that the maximum and RMS position, velocity, and acceleration values were the same or very close. The utilization of the linear graph method in analyzing the elevation dynamics of the weapon system, a critical constituent of the main battle tank, is essential in demonstrating the efficiency of this method in obtaining the mathematical model of systems. In addition, the compatible vibration characteristic of the breech and muzzle sections means that there will be no additional stress and tension and, therefore, no deflection of the barrel from the target. Thus, it has been proven that by realizing the two-piece design, stress and tension can be successfully distributed during the firing. Numerical solution findings obtained through simulation study are a robust tool to evaluate the accuracy of the results. It is expected that the findings of the present study and the results of an experimental study will mainly agree. It should be noted that numerical and mathematical representations ensure us a simplified perspective of the relationships. In other respects, the values which are determined by experimentally can also be impressed by various parameters that may not exist in theoretical models causing some differences between mathematical and experimental findings. That is why it is recommended to perform experimental studies for extensive discussion.
References
Taghavifar, H.; Mardani, A.: Off-road vehicle dynamics. Stud. Syst. Decis. Control 70, 37 (2017)
Banerjee, S.; Balamurugan, V.; Krishna Kumar, R.: Vibration control of a military vehicle weapon platform under the influence of integrated ride and cornering dynamics. Proc. Inst. Mech. Eng. J. Multi-body Dyn. 235, 197–216 (2021). https://doi.org/10.1177/1464419320963997
Jakati, A.; Banerjee, S.; Jebaraj, C.: Development of mathematical models, simulating vibration control of tracked vehicle weapon dynamics. Def. Sci. J. 67, 465 (2017). https://doi.org/10.14429/dsj.67.11532
Purdy, D.J.: Comparison of balance and out of balance main battle tank armaments. Shock. Vib. 8, 167–174 (2001). https://doi.org/10.1155/2001/326219
Banerjee, S.; Balamurugan, V.; Kumar, R.K.: Effect of integrated ride and cornering dynamics of a military vehicle on the weapon responses. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 232, 536–554 (2018). https://doi.org/10.1177/1464419318754647
Shukla, J.: Modelling and simulation of main battle tank to stabilize the weapon control system. In: SAE Technical Papers (2018)
Cąkir, M.F.; Bayraktar, M.: Modelling of main battle tank and designing LQR controller to decrease weapon oscillations. J. Fac. Eng. Arch. Gazi Univ. 35, 4 (2020). https://doi.org/10.17341/gazimmfd.660584
Karayumak, T.: Modeling and stabilization control of a main battle tank (2011)
Arık, R.: Modelling and control of fire system for main battle tank (2005)
Ogata, K.: System dynamics. Pearson (2004)
Ercan, Y.: Mühendislik sistemlerinin modellenmesi ve dinamiği. Literatür (2003)
Ercan, Y.: Mühendislik Sistemlerinin Dinamiğine Hamilton Prensibi Yaklaşımı. TOBB University of Economics and Technology (2016)
Kartal, F.; Kisioglu, Y.: Fatigue performance evaluations of vehicle toroidal liquefied petroleum gas fuel tanks. J. Press. Vessel Technol. Trans. ASME 139, 041402 (2017). https://doi.org/10.1115/1.4035976
Kartal, F.: Evaluation of explosion pressure of portable small liquefied petroleum gas cylinder. Process Saf. Progress 39, e12081 (2020). https://doi.org/10.1002/prs.12081
Talati, F.; Jalalifar, S.: Analysis of heat conduction in a disk brake system. Heat Mass Transfer/Waerme- und Stoffuebertragung 45, 1047–1059 (2009). https://doi.org/10.1007/s00231-009-0476-y
Kumar, S.; Tewari, V.K.; Bharti, C.K.; Ranjan, A.: Modeling, simulation and experimental validation of flow rate of electro-hydraulic hitch control valve of agricultural tractor. Flow Meas. Instrum. 82, 102070 (2021). https://doi.org/10.1016/j.flowmeasinst.2021.102070
Laski, P.A.; Takosoglu, J.E.; Blasiak, S.: Design of a 3-DOF tripod electro-pneumatic parallel manipulator. Rob. Auton. Syst. 72, 59–70 (2015). https://doi.org/10.1016/j.robot.2015.04.009
Tjahjowidodo, T.; Al-Bender, F.; Van Brussel, H.; Symens, W.: Friction characterization and compensation in electro-mechanical systems. J. Sound Vib. 308, 632–646 (2007). https://doi.org/10.1016/j.jsv.2007.03.075
Ogata, K.: Modern Control Engineering. Pearson (2010)
Bliudze, S.; Furic, S.; Sifakis, J.; Viel, A.: Rigorous design of cyber-physical systems: linking physicality and computation. Softw. Syst. Model. 18, 1613–1636 (2019). https://doi.org/10.1007/s10270-017-0642-5
Nalbant, M.O.; Sezer, S.: Mathematical modelling of electrically driven elevator via linear graph method, dynamic response analysis and active vibration control. Celal Bayar Üniversitesi Fen Bilimleri Dergisi. 15, 241–250 (2019). https://doi.org/10.18466/cbayarfbe.449655
Alipourazadi, S.: New approaches to linear graph modeling of distributed-parameter systems. https://open.library.ubc.ca/collections/24/items/1.0072648 (2012)
Mcphee, J.J.: A unified graph—theoretic approach to formulating multibody dynamics equations in absolute or joint coordinates. J. Franklin Inst. 334, 431–455 (1997). https://doi.org/10.1016/s0016-0032(96)00086-5
McPhee, J.J.; Redmond, S.M.: Modelling multibody systems with indirect coordinates. Comput. Methods Appl. Mech. Eng. 195, 6942–6957 (2006). https://doi.org/10.1016/j.cma.2005.02.033
Richard, M.J.; Bouazara, M.; Therien, J.N.: Analysis of multibody systems with flexible plates using variational graph-theoretic methods. Multibody Syst. Dyn. 25, 43–63 (2011). https://doi.org/10.1007/s11044-010-9229-4
Uyguroğlu, M.; Demirel, H.: TSAI-TOKAD (T-T) graph: the combination of non-oriented and oriented graphs for the kinematics of articulated gear mechanisms. Meccanica 40, 223–232 (2005). https://doi.org/10.1007/s11012-005-4023-8
Richard, M.J.; Bouazara, M.: Graph-theoretic approach for the dynamic simulation of flexible multibody systems. Adv. Mech. Eng. (2012). https://doi.org/10.1155/2012/530132
Tursun, M.; Ekinat, E.: Suppression of vibration using passive receptance method with constrained minimization. Shock. Vib. (2008). https://doi.org/10.1155/2008/858307
Shi, P.; McPhee, J.: Dynamics of flexible multibody systems using virtual work and linear graph theory. Multibody Syst. Dyn. (2000). https://doi.org/10.1023/A:1009841017268
Ganapathy, T.; Murugesan, K.; Gakkhar, R.P.: Performance optimization of Jatropha biodiesel engine model using Taguchi approach. Appl. Energy (2009). https://doi.org/10.1016/j.apenergy.2009.02.008
Leng, H.; Zhang, Y.: Modeling and simulation of double capacity tank level control system based on linear graph theory. In: Chinese Control Conference (2018)
McCormick, E.; Lang, H.; de Silva, C.W.: Dynamic modeling and simulation of a four-wheel skid-steer mobile robot using linear graphs. Electronics (Switzerland) (2022). https://doi.org/10.3390/electronics11152453
De Silva, C.W.; Pourazadi, S.: Some generalisations of linear-graph modelling for dynamic systems. Int. J. Control. (2013). https://doi.org/10.1080/00207179.2013.822101
Ganji, M.; Behbahani, S.; De Silva, C.W.: Integrated and object-oriented mechatronic modelling of piezoelectric transducers using linear graphs. Int. J. Model. Simul. (2013). https://doi.org/10.2316/Journal.205.2013.1.205-5728
Diaz-Calderon, A.; Paredis, C.J.J.; Khosla, P.K.: Automatic generation of system-level dynamic equations for mechatronic systems. CAD Comput. Aided Des. (2000). https://doi.org/10.1016/S0010-4485(00)00016-6
Gamage, L.B.; De Silva, C.W.; Campos, R.: Design evolution of mechatronic systems through modeling, on-line monitoring, and evolutionary optimization. Mechatronics (2012). https://doi.org/10.1016/j.mechatronics.2011.11.012
Sass, L.; Mcphee, J.; Schmitke, C.; Fisette, P.; Grenier, D.: A comparison of different methods for modelling electromechanical multibody systems. Multibody Syst. Dyn. (2004). https://doi.org/10.1023/B:MUBO.0000049196.78726.da
De Silva, C.W.: Use of linear graphs and Thevenin/Norton equivalent circuits in the modeling and analysis of electro-mechanical systems. Int. J. Mech. Eng. Educ. (2010). https://doi.org/10.7227/IJMEE.38.3.3
Jiangang, Z.; Dagui, H.; Chaoshuang, L.: Research on dynamic model and control strategy of auto-leveling system for vehicle-borne platform. In: Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, ICMA 2007 (2007)
Ganji, M.; Behbahani, S.; De Silva, C.W.: Integrated modeling of an electro-hydraulic servo manipulator using linear graphs. In: 2010 8th IEEE International Conference on Control and Automation, ICCA (2010)
Uren, K.R.; Van Schoor, G.: State space model extraction of thermohydraulic systems-part I: a linear graph approach. Energy 61, 368–380 (2013). https://doi.org/10.1016/j.energy.2013.06.043
de Silva, C.W.: Linear-graph modeling paradigms for mechatronic systems. Int. J. Mech. Eng. Educ. 40, 305–328 (2012)
Dao, T.S.; McPhee, J.: Dynamic modeling of electrochemical systems using linear graph theory. J. Power. Sources 196, 10442–10454 (2011). https://doi.org/10.1016/j.jpowsour.2011.08.065
Kuseyri, İS.: Stabilization and DOB-based disturbance rejection for MBT gun-barrel elevation drive. Int. J. Adv. Eng. Pure Sci. 32, 206–211 (2020)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cakir, M.F., Sezer, S. & Bayraktar, M. Modeling and Simulation of Elevation Dynamics of Main Battle Tank Weapon System with Linear Graph Method. Arab J Sci Eng 49, 11157–11166 (2024). https://doi.org/10.1007/s13369-023-08546-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-023-08546-6