
Abstract
Information exchange via aeronautical data communication is of increasing importance for the communication between pilots and air traffic control, providing the basis for surveillance of aircraft in oceanic or remote airspaces, as well as enabling the communication between an airlines’ fleet and its operational control. The aeronautical data communication that is being transmitted via data link encompasses, among others, surveillance-related aircraft position updates, clearances for flight path change requests, maintenance-related status reports, estimated arrival times and weather information in accordance with the required performance, that is set by technical standards. Aeronautical data communication events are driven by an aircraft’s flight phase, the current airspace or may occur in a randomized manner throughout the flight. As the usage of aeronautical data communication is expected to grow in future, ample data link technologies are being evaluated and developed. The usability and operational value of new data link technologies for aeronautical applications can be evaluated by applying suitable models of the respective data link communication pattern combined with operational simulations. Current models for aeronautical data communication demand support the design and evaluation of direct aircraft-to-ground communication networks. The geographical location of the data communication demand is secondary for these models, since coverage areas can be defined, where direct communication links are available. New data link technologies offer the opportunity of direct data transfer between aircraft and forwarding of messages from sending aircraft to a ground entity via ad-hoc communication networks between aircraft. This is of special interest for the North Atlantic oceanic airspace, an airspace with high traffic density and little ground infrastructure, where communication currently relies mostly on satellite-based systems. For these airborne ad-hoc networks the definition of coverage areas around ground or space-based entities is not possible. To assess the new data link technology a model for aeronautical data link communication demand is needed, that accounts for operationally derived communication events such as handover procedures at boundaries of oceanic control areas or status reports at route-specific waypoints, which cause an accumulation in certain geographical regions that pose a challenge to the dynamic connectivity coverage of aeronautical ad-hoc networks. Addressing this issue, we present a new modelling approach for air traffic service communication that considers the operational context of the simulated airspace and provides a geospatial data communication demand distribution, which is derived from air traffic management procedures, airspace geometries and events inherent to each flight path. The air traffic service communication is then validated based on 2019 air traffic and performance monitoring data provided by ICAO supplemented by an existing model for communication related to airline operational control. In a next step, the communication demand per area in the North Atlantic Oceanic airspace is being assessed. The aeronautical data traffic model shows deviations of less than one message per aircraft and airspace when compared to recorded data traffic from 2019 for two key services in the most frequented North Atlantic oceanic control areas. Therefore, it is assumed to be suitable for the evaluation of network-based data link technology and operational impact assessments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Efficient and secure communication via data link with both, high availability and low impact on bandwidth, is becoming increasingly important in aviation. It is a key enabler for safe and efficient air transport operations and provides the opportunity to use services based on data communication. The quest for new technologies is a very pressing one since the amount of data, that is exchanged between aircraft and ground entities, such as air traffic control (ATC) or the airlines operational centre, increases and a potential future growth of air traffic using data-based communication services has to be accounted for.
To cope with future aeronautical communication needs, the new L-Band Digital Aeronautical Communications System (LDACS) is currently under standardization [1]. LDACS is not only allowing an increase of the information exchanged between aircraft and ground entities via air-to-ground link but also allows for a direct air-to-air link between aircraft based on a suitable system extension. In combination with the air-to-ground link this would also enable the coverage extension of LDACS ground stations using aircraft with ground connection as relay for other aircraft that are within LDACS air-to-air range. The resulting communication network of interlinked aircraft and ground stations constitutes an aeronautical ad-hoc network, where aircraft serving as network nodes connect and disconnect automatically depending on the range limitation of the air-to-air data link. The new technology has the potential to provide better transmission rates than existing line-of-sight datalink technologies, while at the same time exhibiting the potential of lower monetary costs than data transmission via satellite. At the same time, it can serve as a redundancy for satellite datalink, thus increasing datalink availability.
The assessment of such a new technology in the field of aeronautical communication necessitates an accurate modelling of aeronautical data link communications. The data communication demand model presented in this paper is addressing this issue and will make it possible to evaluate operational benefits arising from such a future capability as part of the IntAirNet project funded by the German Ministry of Economic Affairs and Energy (BMWi) under the National Aeronautical Research Programme (LuFo). In the further context of this paper we will refer to this data communication demand model as IAN DTG.
1.1 Aeronautical data link communication and technology
Aeronautical information exchange using data link saw its first regular use in the 1970s, when airlines started using the aircraft communications addressing and reporting system (ACARS) to receive basic flight information from their in-flight aircraft to improve their operational efficiency. With the system having proven its operational usability, ATC started using ACARS for flight clearances (especially downstream oceanic flight clearances). With the initial ACARS data link technology having been replaced with more efficient VHF data link mode 2, aeronautical data link communication has seen a broader use by ATC via controller-pilot data link communications (CPDLC) applications and shown its capability to replace existing VHF voice.
As prospected by the technology roadmaps of ICAO [2] and SESAR [3] a multi-link environment with LDACS as its core pillar is expected to replace current aeronautical communication technologies. It is also planned to interconnect with the other flight guidance domains, surveillance and navigation, by offering a common carrier technology for their respective services. The planning goes along with a significant shift towards automated digital communication for air traffic services [3]. It has to be noted, that the above-mentioned technology roadmaps only project a tentative future development that is intended by the respective stakeholders and does not necessarily result in equipage mandates of a standardized solution at given dates. LDACS air-to-ground data link is part of current standardization efforts by ICAO and EUROCAE, and supported by research and development activities within SESAR [4]. If proven operationally advantageous, LDACS air-to-air might be included these efforts.
Aeronautical communication is commonly separated into four domains each serving a different communication demand with different requirements in terms of safety, quality of service and bandwidth demand between an airborne station and a ground station. These four domains are.
-
Air traffic service (ATS)
-
Aeronautical operational control (AOC)
-
Aeronautical administrative communication (AAC) and
-
Aeronautical passenger communication (APC).
Of these four domains, ATS describes the communication between ATC and aircraft that is required for traffic control and safe operation of flights. AOC encompasses all communication between an airline's operational control centre and with its aircraft to enable efficient operation. AAC comprises the communication between aircraft or its crew and the administrative entities of an airline, which is not related to the operation of the current flight, such as passenger lists or connecting flights. Finally, APC describes communication between passengers onboard the aircraft and other entities outside the aircraft. Typically, this would be phone calls or internet usage.
As of today, aeronautical data link communication is not only seeing a broad usage in the domain of ATS, which is addressed by the aforementioned technology roadmaps but also in AOC, where it is the sole means of communications [5]. Therefore, ATS and AOC communication domains–both being of high relevance for the safe and efficient operation of aircraft–have been further elaborated and considered in the aeronautical data communication demand model that is being presented in this publication.
Data link communication applications for ATS are mainly used in congested continental airspaces, e.g. in Europe or in oceanic, remote and polar airspaces (ORP) [6], where certain means of flight guidance are needed, such as it is the case in the North Atlantic and North Pacific oceanic areas. As ATS are highly dependent on the service portfolio and procedures used by the respective air navigation service provider (ANSP) managing a specific area, the implementation and usage of ATS data link varies globally and is distinctive for each airspace control area.
Typical applications for ATS are:
-
Clearance request and delivery
-
Position reporting via automatic dependent surveillance (ADS-C)Footnote 1
-
ATC communication management
AOC services are inherent to the aircraft operators needs and therefore independent from particular ANSP service areas. Typical applications for AOC are:
-
Flight progress reports
-
Health monitoring
-
Maintenance
-
Weather reports
The information exchange for ATS and AOC in continental airspace is typically using ground stations and transmission technology that is sharing its frequency band with very high frequency (VHF) voice technology such as VHF data link mode 2 [5]. Where information exchange via ground infrastructure is not an option, which is the case for most of the ORP airspaces, information exchange takes place via satellite link, which comes along with higher monetary costs.
1.2 North Atlantic oceanic airspace
The usage of information forwarding by ad-hoc networks provides a possible benefit in an airspace that.
-
Does not have a network coverage via ground installations
-
Is seeing a high number of traffic participants that could serve as nodes for the ad-hoc communication network.
In these airspaces, airborne ad-hoc networks can provide a potentially more economical alternative to communication via satellite and reduce the effect of satellite network outages, allowing for safer and more efficient operation of aircraft.
Both features are met by the North Atlantic (NAT) airspace, which in 2019 has seen from 32,000 up to more than 50,000 flights per month in its central control areas [7] and is framed by ground stations along its eastern and western boundaries. These are providing a continuous data link communications coverage in the vicinity of its eastern and western boundaries, while most of its area does not have a direct air-to-ground communications coverage. Consequently, the NAT was selected as a representative area to set up the data communication demand model presented in this work.
We define the NAT as given by the airspace administered by ICAO’s North Atlantic Office encompassing the oceanic control areas (OCA) of:
-
Santa Maria (LPPO)
-
Shanwick (EGGX)
-
Bodo (ENOB)
-
Reykjavik (BIRD)
-
Gander (CZQX) and
-
New York Oceanic East (KZWY)
as shown schematically in Fig. 1.

North Atlantic Oceanic Control Areas
The focus of this work is put on aircraft movements and data communication demand modelling accuracy in the most frequented OCAs Shanwick and Gander. These two OCAs account for the highest air traffic density in the NAT region with a monthly average of hosted flights of more than 42,000 and 39,000 flights, respectively according to [7]. Due to this high traffic load an organised track system (OTS) has been introduced in the NAT in the 1960s. The oceanic tracks mostly cross the EGGX and CZQX OCAs, whereas in 2019 about 45% of all flights crossing the NAT have been using these tracks [7]. The NAT OTS is of particular interest with regard to data communication demand modelling, since the usage of organised tracks requires specific communication, navigation and surveillance schemes and performances based on the particular track and the spacing applied, which are described in [8].
2 Related work
Several different approaches for modelling aeronautical data communication demand have been identified from previous works.
Firstly, a synthetic modelling, which creates a constant or recurrent data stream and is independent from the flight paths of an aircraft and its operational status, as it was used in [9] to model APC data communication.
Secondly, the usage of proprietary input, which can be recorded communication logs or statistic evaluations of current aeronautical data link usage, from relevant ATS or AOC stakeholders, such as the communication service providers, which operate the current aeronautical data communication networks which has been presented in [10, 11]. This modelling approach can include e.g. dependencies of data communication behaviour e.g. on type of airspace user and airspace type.
Furthermore, several works [11,12,13] base the modelling of aeronautical data communication demand on a comprehensive assessment by FAA and EUROCONTROL of predicted aeronautical data communication demand including listing of relevant services depending on flight phase and airspace type as well as message sequences and sizes. The results of this assessment are intended to be used as a technical guidance for the development of related technologies and procedures.
A further possible approach is the recording of actual aeronautical data communication as it has been performed in [14], or the usage of the data link performance reports for aeronautical data link communication made available by the North Atlantic office of ICAO [7] and deducing a representative data communication demand model. Additionally, the aeronautical data communication demand model can be supplemented by technical standards for aeronautical data link applications, such as the safety and performance standards published by EUROCAE [15,16,17], which provide for message sequences within services and performance requirements.
In general, the above approaches yield a data communication pattern per aircraft either in data rates [8, 9] or communication events with allocated message sizes [10,11,12]. As input 4D trajectory data of all aircraft within a scenario is required for all approaches, which can be supplemented by parameterized communication pattern, defining occurrence probabilities and intervals, and flight phase status of each aircraft for those approaches yielding communication events [10,11,12].
The referenced studies usually investigate aeronautical data communication demand and its propagation for the ATS and AOC domain in highly congested continental airspaces [10, 12] or aerodrome operations [11]. For the oceanic airspace the APC domain has been modelled by Medina [9]. Of all the aforementioned studies only Ehammer et al. and Gräupl et al. [11, 12] consider specific ATS and AOC applications, which are linked to the current flight phase of the respective aircraft.
A basic source for aeronautical data communication demand assessment and modelling in the ATS and AOC domains is the aforementioned communications operating concept and requirements for the future radio system (COCR-FRS) [18], which serves as a technical guidance for aeronautical data link technology assessment. The COCR-FRS delivers comprehensive descriptions of services including flight phase dependent occurrence as well as number and size of uplink and downlink messages contained in each service. It covers continental as well as oceanic aeronautical communication. The COCR-FRS has been developed in a joint effort of FAA and EUROCONTROL in the context of a study on future aeronautical communication that took place from 2004 to 2007 with the aim of harmonizing aeronautical communication and its future development in the airspace administrated by the two organisations [19]. Apart from possible deviations between service definitions in the COCR-FRS and their actual current implementation, the COCR-FRS, also due to limited support of AOC stakeholders during the aforementioned study, does not provide a complete set of AOC applications [11]. This is also supported by the fact that AOC implementations might differ between operating airlines and aircraft types within an airline’s fleet.
As suggested in [19] the assumptions in the COCR-FRS can be supplemented by the respective technical standards for aeronautical data link communication with regard to ATS relevant applications [15,16,17]. The actual usage of ATS in the NAT region is documented by ICAO NAT office in a yearly report of which [7] documents the situation in 2019. Reports for earlier years are showing less air traffic and also lower data link usage.
Table 1 summarizes the applicability and modelling approach of the above-mentioned aeronautical data traffic and communication demand models and compares them to the IntAirNet Data Traffic Generator (IAN DTG) presented in this work and described in Sect. 3.
With regard to the NAT scenario in combination with data propagation via air-to-air multi-hop networks, an accurate geographic location of service activations is desired to properly assess connectivity within the network. With regard to AOC services, it is concluded that the data communication demand model presented in [12] with the parameters defined in the COCR-FRS can be applied in oceanic airspace, since AOC service activations are:
-
Independent from organisational airspace structure
-
Independent from flight path geometry and diversions
-
Specific to operating airline and aircraft type
For recent implementation of ATS data link communication not only detailed service descriptions are given by [17], but also the aforementioned, comprehensive data link performance reporting provided by the ICAO NAT office in [7]. Additionally, [8] describes reporting intervals for ATS surveillance services and performance requirements for communication and surveillance services required for operational procedures in the NAT OTS.
Concerning the modelling of aeronautical communication based on given air traffic mobility data, a reverse approach using ICAO data link performance reports [7], to validate aircraft trajectory modelling with a focus on step-climb behaviour in ORP airspace was applied in [20].
While the authors consider [12] to be the current state of the art for aeronautical data communication demand modelling in European continental airspace for the assessment of demand coverage with geostationary data link technology, a systematic modelling and analysis of ATS data communication demand in the NAT airspace, which delivers not only message frequency and sizes but also airspace and flightpath specific geographic locations of message generation, such as it is relevant for demand coverage with aeronautical ad-hoc networks with variant coverage, as presented in this paper, is not known to the authors.
Therefore, to achieve a comprehensive modelling of aeronautical data communication demand for both ATS and AOC in the NAT, we follow a twofold approach. To retrieve an aeronautical data communication demand model for AOC data communication in ORP airspace, we adopt an established modelling approach [18], that has been used in the latest aeronautical data communication demand model known to the authors [12]. While in [12] it has been applied to continental airspace, we use the ORP data set given in [18]. With regard to ATS-related data communication demand, we consider step-climb behaviour to relate realistic clearance requests as it has been previously applied in [20], use current rules for ADS-C reporting [8] and airspace boundaries as activation for data link handover and ADS-C contract initiation according following message sequences and procedures described in technical standards [15,16,17]. The resulting data communication demand pattern for ATS is the compared with recorded ATS data link communication on OCA level [7]. With this approach a data communication demand pattern that accounts for effects of OCA geometries and flight path changes for ATS data communication in the NAT is established, which then can serve as the basis for data communication demand coverage in aeronautical ad-hoc networks.
3 Methodology
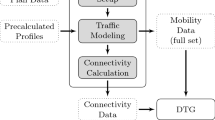
The general approach for the modelling methodology of aeronautical data communication demand is presented in Fig. 2. The simulation environment that is being developed within the scope of the IntAirNet project is named KOSMO. In its first stage KOSMO analyses air-to-air connectivity with its connectivity simulator (CSI) module as presented in [21] and delivers results for the aeronautical data communication demand using the data traffic generator (DTG) module as presented in this work. The data communication demand is described by service activation time series for each aircraft containing message sequences and allocated message sizes. As aeronautical communication, among other parameters, is dependent on flight phase and current airspace of each aircraft, the simulation of aeronautical data communication demand and the resulting data communication demand is based upon on air traffic mobility data as an output of the CSI module, which will be addressed in Sect. 3.1. Due to the different sources available for the ATS and the AOC domains, the underlying methodology of the IAN DTG follows different approaches, which will be described in Sects. 3.2 and 3.3. The results thereof are contained in the communication profiles for AOC and ATS. Together with the mobility data these are used to identify the aeronautical data communication demand within the DTG module.

General approach as followed within this work
3.1 Air Traffic modelling
The IAN DTG is based on air traffic mobility data that encompasses 4D trajectory data with additional status information indicating for each aircraft and timestep the current OCA and notable waypoints along the trajectory, which are:
-
Top of climb
-
Top of descent
-
Step climb start and end points.
An air traffic mobility data model which meets these requirements and has been used in combination with the IAN DTG is presented in Marks et al. [21]. In this work the applicable simulation area is defined, which encompasses all of the above-mentioned OCAs that are presented in Fig. 1, excluding areas south of the 39th parallel. The air traffic modelling uses flight plan data from first of August 2019 and is filtered to flights between Europe and North America. Furthermore, the data have been filtered to include only long-range aircraft and flights with ranges above 1000 km. The air traffic mobility data is recorded with a resolution of 60 s, which also sets the resolution for the assessment of data communication demand. As the analysis of the IAN DTG output does not include connectivity effects and the validation with ATS performance monitoring data requires combined data of east- and westbound traffic, only combined data sets, that include traffic in both directions, are used within this work.
3.2 ATS data communication demand modelling
The set of implemented ATS applications via data link that make up the ATS communication profile, mentioned in Fig. 2, is given in Table 2. The selection of ATS applications relevant for ORP (service) and the corresponding message sequence (SEQ) of each service are based on [15, 16]. Usage of ADS-C and CRD services in the NAT OCAs has also been compared to service usage occurrence data of 2019 documented in [7]. The results thereof are presented in Sect. 3.4.
The SEQ describes the pattern of messages transmitted via reverse (R) link, i.e. aircraft-to-ground, and forward (F) link, i.e. ground to aircraft. The probability (PRO) for each service activation per flight is given in the third column. As all presented ATS are standards that are required for using the OTS within the NAT this value is currently set to 100% for all implemented services, if failure rates or equipage rates are to be included, this value can be adjusted accordingly. The periodicity (PER) or activating event (EVT) is also given within this column. The PER is relevant for the ADS-C position reports and might differ based on the separation conditions applied to each air traffic participant during each portion of flight. Based on the separation standard for same direction, longitudinally time-based separated flights described in [8], this value has been set to one service activation with an activation frequency of 840 s (1f840s). The events that trigger a service activation are step climbs (STC), entering an OCA (OCA_E), leaving an OCA (OCA_L) and crossing of waypoints (WP). Additionally, message sizes in bytes for reverse link (S_RL) and forward link (S_FL) messages are given based on the COCR-FRS.
A detailed description of each service listed in Table 2 can be found in [15,16,17]. Therefore, only a brief description with reference to the specific model implementation conditions will be given here.
CRD
Clearance request and delivery. The presented model assumes a clearance request before each step climb during a flight. Currently a lead time of 200 s is assumed, wherein the clearance request should be completed. This time span is within the 240 s set by the required communication performance for communication transactions to follow separation procedures in the NAT. In reality these lead times will vary depending on pilot and air traffic controller behaviour. This effect was assessed to be negligible in face of other model uncertainties e.g. regarding the mobility data. Possible CRD activations due to other causes (e.g. rerouting requests due to weather or route optimization) are not considered. Also, it is assumed that all clearance requests are performed via the CPDLC CRD service instead of conventional voice communication. According to [7] this is a valid assumption for aircraft using the OTS in EGGX, CZQX, LPPO and KZWY, where 98 to 99% of flights where recorded using CPDLC in the reporting timeframe. Considering also aircraft not using the OTS in these OCAs yielded a lower percentage of CPDLC users ranging from 86 to 96%, while BIRD yielded a lower percentage of CPDLC users in general.
ADS-C (initiation)
Initiation of automatic dependent surveillance–contract. Before entering an OCA an ADS-C periodical contract is initiated by the responsible ATC centre and terms on sending periodical status updates and event-based reports are defined. For this application a lead time of 1800s before entering an OCA is assumed. While actual lead times might vary depending on local ATC procedural requirements, this lead time was assumed to generate at least two position reports before an aircraft enters the respective OCA, allowing the respective air traffic control centre to establish a course of entering aircraft. The assumption was made in coordination with the periodical reporting time and the lag time for ADS-C contract cancellation described below to meet the number of ADS-C messages in EGGX and CZQX OCAs.
ADS-C (periodical)
Periodical ADS-C position message from aircraft to ATC. The reporting interval in the implemented model is given with the PER value and based on ICAO NAT separation procedures [8]. Currently the same separation procedure, requiring one ADS-C report every 14 min, is assumed for all aircraft within the ASA, which is addressing the requirements of the OTS in the CZQX and EGGX OCAs. Given the availability of recorded actual fight path data rather than flight plan data, a more detailed approach would assign differing reporting intervals to each flight depending if it is operating in the OTS or following an individual track.
ADS-C (event)
Event-based ADS-C reports are sent out when an aircraft is crossing pre-defined waypoints and exceeding thresholds with regard to planned route or aircraft parameters. Thresholds and waypoints for a contract are defined in ADS-C (initiation). The implemented model does only simulate OTS-specific waypoints for aircraft in EGGX and CZQX OCAs at the 20°W, 30°W, 40°W and 50°W meridians according to [22]. Currently not represented are ADS-C (event) activations due deviations from flying course and altitude, which would require a higher level of detail also in the mobility data used. Also, ADS-C (event) activations due to failed ADS-C (periodical) transmissions have been omitted, since airspace-specific records on failed ADS-C transmissions were not available and might not be transferable to data link technology different from the one in place.
ADS-C (cancel)
Cancellation of ADS-C contract. Upon leaving an OCA the responsible ATC centre cancels the ADS-C contract with an air traffic participant. With the present implementation the cancellation of an ADS-C contract takes place 900 s after leaving the respective OCA. This lag time was assumed to allow one ADS-C position report after leaving an OCA, informing the respective air traffic control centre that an aircraft has left its area of responsibility.
ACM
ATC context management describes the handover from one ATC centre to another when entering and leaving an OCA and ensures that only one control centre at a time will be responsible for clearances and procedures. The lead time for application activation before entering a new control zone is 300 s with the current application, ensuring that the handover procedure is completed before entering a new OCA. Again, in reality this value will vary depending on the needs of the respective airspace sector and air traffic control, but resulting inaccuracies were deemed to be negligible in face of model uncertainties e.g. resulting from the mobility data.
3.3 AOC data communication demand modelling
With regard to AOC service modelling, the setup described in the COCR-FRS has been implemented in the IAN DTG, using the assumptions for ORP airspace. Thus the implementation differs from [12], which considers the continental AOC service pattern. An overview on the AOC services, that have been implemented as AOC communication profile, is given in Table 3, with all of the parameters being defined in the COCR-FRS. With the current implementation all AOC services except for MAINTPR are always active for all flights, while MAINTPR is only activated for 5% of all flights. The periodicity as based on the same source is either given by activations per timeframe (e.g. one activation per 4-h timeframe–1p4h) or fixed time interval (e.g. activation frequency of 180 s–1f180s). Further information given in Table 3 is addressing the message size in bytes for reverse link (S_RL) and forward link (S_FL). The EVT activation is only used for the ENGINE service, which will only be activated at top of climb (TOC) and top of descent (TOD) points of a flight’s trajectory.
With a more comprehensive description of each AOC service contained in Table 3 given by the COCR-FRS, only short key points for each service will be given at this point.
FLTPLAN: request/receive current flight plan data.
FLTSTAT: send flight status report.
FREETXT: send/receive free text message.
FUEL: send fuel status report.
MAINTPR: maintenance problem resolution.
NOTAM: retrieve notice to airmen.
POSRPT: send position report.
WXGRAPH: retrieve graphical weather information.
WXRT: send recorded weather data.
WXTEXT: retrieve textual weather report.
ENGINE: send engine performance report.
MAINTRT: send maintenance-relevant data.
3.4 Model validation
The model validation using performance monitoring data from 2019, published by the ICAO NAT office [7] was performed for the ATS applications ADS-C and CRD as listed in Table 2. The station handover application ACM is not part of the performance monitoring data and is therefore not included in this validation. Also, AOC applications are not included, since performance monitoring data was not available during the study. It has to be noted, that the performance monitoring data covers only aeronautical data link communication. Voice communication via high frequency (HF), very high frequency (VHF) or satellite communications is not covered. This reduces the significance of the validation in airspaces where communication still largely relies on voice communication. Also, the performance monitoring data only covers the OCAs EGGX, CZQX, BIRD, KZWY (east) and LPPO excluding ENOB. Furthermore, the performance monitoring data only delivers the average number of ADS-C or CPDLC messages per flight and OCA on a monthly basis. Accordingly, only validation against an average day for each month is possible. More detailed data, might enable consideration of specific disturbances in the traffic flow, such as weather events or emergencies, causing an increase in clearance requests or ADS-C reports due to deviation from clearance limits. The validation is performed with one simulation run of the data set of 2464 flight paths as retrieved from flight plan data for August 1, 2019, with a simulation duration of one day. Validation based on a longer simulation timeframe is not expected to differ significantly from the presented results, unless further effects are considered, that cover correlations between air traffic density and ATS data communication demand. The references used to set up the model in this work (see Sect. 3.2) do not provide for such further effects.
First an average number of messages per flight per OCA is calculated from the total number of messages and flights given in [7] for ADS-C and CPDLC. Then the average number of messages per flight and OCA for the simulation results is assessed and compared against the value resulting from the performance monitoring data. The results are shown in Tables 4 and 5.
The validation results for ADS-C message counts in Table 4 indicate, that the chosen data communication demand simulation setup applied on the mobility data provided by [21] results in similar ADS-C message counts compared to the actual situation in 2019 for EGGX, CZQX and BIRD. The lowest deviation is observed for CZQX. For LPPO and KZWY however, the simulation underestimates the average number of ADS-C messages per flight significantly. This is expected, since the mobility data used does only cover the fraction north of the 39th parallel of these airspaces, while the performance monitoring data includes message counts for the whole KZWY and LPPO OCAs. Further reasons for this underestimation could be:
-
Mobility data overestimates number of flights with short duration of stay (and thus low number of generated ADS-C messages) in LPPO, KZWY,
-
Mobility data does not contain flights crossing KZWY in north–south direction (i.e. traffic between North America and South America)
-
Performance monitoring data contains message counts for complete KZWY (east + west) but mobility data contains flights for KZWY east only
Table 5 shows the validation results for the CRD service, being the only CPDLC application considered for data communication demand simulation in the ORP domain. The results show an overestimation of messages per flight and per OCA for OCAs EGGX and CZQX by about 40% in comparison to performance monitoring data. This could be attributed to:
-
Step climb requests are included in downstream oceanic clearance (no additional CRD)
-
CRD partly still uses voice communications (CPDLC usage rate in 2019 was 88,6% in EGGX and 93,5% in CZQX)
-
Step climb requests might be partly inhibited, while on OTS tracks, due to traffic separation restrictions.
Simulated message transactions for BIRD, LPPO and KZWY on the other hand are underestimated in comparison to the performance monitoring data. This may be caused by the following:
-
Simulation area only covers a part of KZWY and LPPO
-
Same mobility data and performance monitoring data restrictions for KZWY as described for ADS-C message count
-
Higher communication demand in LPPO and BIRD due to transition between ORP and terminal operations within OCA (both OCAs contain aerodromes)
-
Weather effects on route deviations causing more CRD activations besides those needed for step climbs.
In summary, for the OCAs, which are fully covered by the applicable simulation area (EGGX, CZQX, BIRD), ADS-C data communication is covered with deviations of 0.67 or less messages per flight, while CPDLC communication deviates by < 0.41 messages per flight. In face of possible inaccuracies due to the usage of flight plan data and geodesics, the deviations for ADS-C appear tolerable. With regard to CPDLC the deviations are more significant, considering an average message count of 0.76 to 1.65 in the respective OCAs.
The accuracy could be further improved using recorded track data, which would include routing of air traffic participants along the NAT OTS, while the current implementation uses routing of aircraft along geodesics between starting and destination airport for each flight.
Higher accuracy might also be achieved by considering a fraction of flights using voice communication for clearance services or effects of the NAT OTS, preventing or preplanning step climbs. Also, the effect of NAT OTS compliant flight paths, which would then have to consider head- and tailwind impact on flight duration, would increase or reduce the message count for ADS-C time-based reports, depending on if flight time is increased or reduced in comparison with a great circle flight path without wind.
The results can be generalized for data communication behaviour for ADS-C and CPDLC services of commercial air transport aircraft in the EGGX, CZQX and BIRD OCAs crossing the North Atlantic in east- or westbound direction with a comparable overall equipage of aircraft with data link communication equipment to the validation data. Other air traffic and related ATS communication demand is outside of the scope of the model verification.
4 Results
In this section aeronautical data communication demand results for the selected air traffic scenario are presented. In a first step data communication demand volume and resulting message frequencies are assessed, while in a second step geographic locations of message initiations and geographic data communication demand distribution in the NAT are presented.
4.1 Message size and frequency
Cumulative communication volumes and frequencies on message level are presented in Figs. 3, 4, 56. In Fig. 3 and Fig. 5 the orange graph shows the message volume caused by messages of a particular size according to the y-axis on the right-hand side in megabytes, while the blue graph indicates the cumulated percentage of the total data volume over message size according to the y-axis on the left-hand side. The orange graph in Fig. 4 and Fig. 6 depicts the message frequency for each message size according to the y-axis on the right-hand side. Here, the blue graph shows the cumulated message frequency in percentage of the overall message count of all ATS- or AOC-related messages that occur within the simulated scenario.

Relative and cumulative communication volume for the AOC domain

Relative and cumulative message size for the AOC domain

Relative and cumulative communication volume for the ATS domain

Relative and cumulative message size for the ATS domain
For the AOC domain messages with sizes up to 157 bytes (see Table 3) account for only 2.7% of the total data volume generated by the IAN DTG as presented in Fig. 3, while they account for around 69% of all message transactions in the scenario setup investigated in this study as it can be seen in Fig. 4. A further 27% of the total message count has sizes between 233 and 968 bytes and accounts for 3.3% of the total data volume. The remaining 94% of the data volume is created by messages of the forward link message of the WXGRAPH service, accounting for 21,077 bytes per message (see Table 3).
With regard to the ATS domain, Fig. 6 shows, that almost 97% of all generated messages have a size of 34 bytes, which is in line with the definitions given in Table 2. The remaining 3% of generated ATS messages can be associated with the CRD application, which has a message size of 186 bytes. As Fig. 5 shows, these account for about 20% of the generated data volume. Generally, the message frequency of the smallest ATS-related messages for the scenario of regard is of the same magnitude as that of the smallest AOC-related messages. The magnitude of total message data volume is significantly lower for ATS services when compared to AOC.
It can be concluded, that the results in terms of message size and frequency, generally coincide with the findings presented in [12] with regard to ATS and AOC in continental airspace. AOC is characterised by a small fraction of messages causing most of the data volume, while ATS is mostly composed of messages with small size in terms of data volume.
4.2 Geographic locations of message initiations
Figures 7, 8, 9, 10 show the resulting service activation patterns within the simulation area for all ATS implementations listed in Table 2.

Geographic distribution of CRD service activations

Geographic distribution of ADS-C (initiation, event-based, cancel) service activations

Geographic distribution of ADS-C (periodical) service activations

Geographic distribution of ACM service activations
CRD
As CRD is not directly linked to the airspace structure, i.e. OCA borders, but to the step climbs occurring on each flight trajectory, the distribution of CRD service activations as seen in Fig. 7 more likely resembles the frequency of flights in a specific region.
ADS-C
The geographic distribution of messages exchanged with regard to ADS-C is shown in Figs. 8 and 9. Figure 8 displays the locations of ADS-C contract initiations (orange), which take place within a designated timeframe before an aircraft enters the respective OCA. Event-based ADS-C messages (green), where an aircraft sends a position report, when crossing a pre-defined waypoint (here at 50°W, 40°W, 30°W and 20°W meridians in EGGX and CZQX).
ADS-C contracts are cancelled by an ATC centre at a certain time after leaving the respective OCA. The corresponding message locations are marked in blue.
With the underlying mobility data containing both, eastbound and westbound flights, service activation and message generation take place west or east from the activating geographic threshold (i.e. waypoint meridian or OCA border). As ADS-C is only used in ORP airspace, no ADS-C contract initiations take part before leaving an OCA.
The geographic locations of ADS-C position report messages, which are sent in pre-defined intervals between contract initiation and cancellation are shown in Fig. 9. In the two central OCAs, EGGX and CZQX, patterns can be identified, hinting to the report interval in combination with few to none crossing flights.
ACM
Figure 10 shows the geographic locations of ACM messages. Message occurrences are located along the OCA boundaries, but also at entry or exit points of the simulated scenario (i.e. around Reykjavik airport and along the southern boundary of the simulation scenario).
The accumulation of data communication demand for ADS-C contract handling and ACM services (e.g. along the border of EGGX and CZQX) illustrates the necessity of implementing a communication profile for ATS that considers geographic properties of an airspace such as OCA boundaries or waypoints. This effect of accumulation of data communication demand is not observed with the existing aeronautical data communication demand models. It might lead to a high data communication demand load on the aeronautical ad-hoc network, since coverage is expected to decrease with increasing distance to the available ground stations.
Since the results presented in this section focussed on the characteristic geographic activation patterns of certain services, the next section will analyse the geographic distribution in terms of data volume density.
4.3 Geographic distribution of data communication demand
Figure 11 shows the cumulated data volume caused by ATS-related communication demand per square kilometre with a resolution of 1 degree each in longitudinal and latitudinal direction. It has to be noted that the area covered by each data point in Fig. 11 therefore varies with changing latitude.

Geographic distribution of ATS-related data volume (east- and westbound)
As shown in Fig. 11 the highest data volume per area occurs along the central boundary stretch of EGGX and CZQX, which is concurrent with the distribution of ACM message locations displayed in Fig. 10.
Since the underlying data does not consider transport delay and responding times between single messages of a service, all messages are allocated to the same activation position. With ACM consisting of eleven single messages and being activated along fixed airspace boundaries, this service should have the highest impact on local ATS data volume peaks, which reach up to 19 bytes per square kilometre within the defined simulation setup.
The AOC geographic data volume distribution is presented in Fig. 12. Here the area-related data volume reaches up to 2432 bytes per square kilometre. Peaks in data volume per area are recorded along five waves within EGGX and CZQX. A sixth wave on the eastern third of EGGX seems to be partly cut off by the OCA boundaries. These peaks are linked to the activation of WXGRAPH services, which according to the model assumptions are contributed with significantly higher message sizes than the other AOC services. Also due to more frequent periodical services such as WXRT, almost all of the simulation area is covered by generated message data volume.

Geographic distribution of AOC-related data volume (east- and westbound)
The consideration of data volume density caused by the aeronautical data communication demand highlights the effects of accumulation in certain areas, (see also Sect. 4.2). It has to be noted, that the data communication demand in terms of data volume is more evenly distributed for AOC services than for ATS, but also yields considerably higher local values for data communication demand in certain regions. As mentioned before, the local accumulation of data communication demand in areas remote from continental airspace is expected to pose a particular challenge to transmission via an aeronautical ad-hoc network.
The fact, that data communication demand that is generated far apart from ground station coverage, requires longer chains of interconnected aircraft persists though, underlining the relevance of the results presented in this section.
A further aspect, that would be relevant to further assessment of data communication demand coverage by an aeronautical ad-hoc network, is the time-dependency, which is not visible from the results presented in this section.
5 Discussion and outlook
In our work we introduced a new aeronautical data communication demand model for the ATS domain, which we applied alongside with an established AOC communication demand model to a 2019 North Atlantic oceanic traffic scenario.
While modelling assumptions for AOC have been derived from available technical guidance material, a new model was developed for the ATS domain with a focus on applicability in the central NAT OCAs Gander (CZQX) and Shanwick (EGGX), which host the majority of flights in the North Atlantic. In this model, the method for the estimation of aeronautic data communication demand is based on communication rules set up for these OCAs by the respective ANSPs, technical standards and flight path change requests, while it is assumed that all aircraft follow the same communication scheme with regard to ADS-C reporting, clearance requests and handover procedures. Also, all aircraft are assumed to communicate exclusively via data link for these services. A further detailing of the model might introduce a quota describing the fraction of aircraft using data communication instead of voice communication or differentiate between aircraft that use the NAT OTS or not, and implement different communication behaviours for both.
The ATS data communication demand model has then been partly validated against data link performance monitoring data from the ICAO NAT office, which indicated a certain degree of accordance for the modelling of the ADS-C application in CZQX and EGGX. Further detailing is recommended for the CRD application, where validation results show an overestimation by the simulation model. This overestimation can also be considered as an anticipation of further increase of data link usage in the respective airspace, which would further shift CRD transactions from voice communications to data link-based CPDLC. Also, a validation of the context management application is an option for model improvement but dependent on availability of performance monitoring data.
Further validation of the newly developed ATS data communication model would be also enhanced by the availability of recorded flight path data instead of flight paths based on flight plan data. This would include deviations from the shortest path due to OTS usage, weather and conflict avoidance as well as actual step-climb behaviour. However, the processing of such recorded flight path data is expected to be very time-consuming and highly depending on data quality.
With regard to AOC, the model assumptions and simulation setup result in data communication demand, which is dominated by one single application (WXGRAPH). Since the modelling of AOC data in this and comparable studies can only relate to the COCR-FRS as technical guidance for data link communication, which possibly might not consider most recent developments, it is recommended to refine the AOC data communication demand model with inclusion of related stakeholders or actual data made available by communication service providers. Such refinement of the AOC data communication demand model, would currently pose the highest potential for improvement in the overall aeronautical data communication demand model presented in this work. Depending on the complexity of actual AOC data communication, due to varying user-specific characteristics by operating airline, communication service provider or aircraft type, a simplified model, that reproduces message quantity and sizes while being validated against real AOC data communication behaviour might also present a practicable approach.
Taking into account simplifications with regard to air traffic modelling as well as ATS and AOC data communication demand modelling, the model for aeronautical data communication, we present in this work is of limited applicability for the assessment of small-scale aspects. These might include a sensitivity analysis for the introduction of new ATS or AOC data communication services or the correlation between particular flight paths and the ATS data communication demand. As the overall results for aeronautical data communication demand show a comprehensive communication pattern for air traffic in the North Atlantic oceanic airspace they do provide a broad basis for possible further studies in macroscopic scale in combination with the overall results of the aeronautical connectivity modelling of aeronautical ad-hoc networks as provided in [21]. These further studies, which are planned to be the next steps of our work, include.
-
Assessment of resulting data rates at bottlenecks and air-to-ground connecting nodes,
-
Initial assessment of message transmission coverage,
-
Growth scenarios for future usage of data link communication,
-
Application to other ORP airspaces.
The results from these studies can then be used for utility analysis and technical guidance for the LDACS air-to-air data link technology or similar technologies that enable ad-hoc aerial communication networks.
Availability of data and materials
All data that are not subject to lisensing agreements by third parties can be made available by the corresponding author upon reasonable request.
Code availability
The software code is proprietary information of the German Aerospace Center (DLR). Therefore, the code cannot be made available to the public or the readers without any restrictions. The codes used for analysing the data and plotting the analysed data are available from the corresponding author upon reasonable request.
Notes
ADS-C is a subscription for periodical or condition-based status updates from an aircraft, requested by the air traffic control centre of an ORP airspace from crossing aircraft.
Abbreviations
- AAC:
-
Aeronautical administrative communication
- ACARS:
-
Aircraft communications addressing and reporting system
- ACM:
-
ATC context management
- ADS-C:
-
Automatic dependent surveillance–contract
- ANSP:
-
Air navigation service provider
- AOC:
-
Aeronautical operational control
- APC:
-
Aeronautical passenger communication
- APT:
-
Airport
- ATC:
-
Air traffic control
- ATS:
-
Air traffic service
- COCR-FRS:
-
Communications operating concept and requirements for the future radio system
- CPDLC:
-
Controller-pilot data link communications
- CRD:
-
Clearance request and delivery
- CSI:
-
Connectivity simulator
- DTG:
-
Data traffic generator
- ENR:
-
Enroute
- EVT:
-
Event
- F:
-
Forward
- HF:
-
High frequency
- IAN DTG:
-
IntAirNet data traffic generator
- LDACS:
-
L-band digital aeronautical communications system
- NAT:
-
North Atlantic
- OCA:
-
Oceanic control area
- ORP:
-
Oceanic, remote, polar
- OTS:
-
Organized track system
- PER:
-
Periodicity
- PRO:
-
Probability
- R:
-
Reverse
- S_FL:
-
Size forward link
- S_RL:
-
Size reverse link
- SEQ:
-
Sequence
- SESAR:
-
Single European sky air traffic management research
- TMA:
-
Terminal area
- VHF:
-
Very high frequency
References
Schnell, M., Epple, U., Shutin, D., Schneckenburger, N.: LDACS: future aeronautical communications for air-traffic management. IEEE Commun. Mag. 52(5), 104–110 (2014)
ICAO. Global Air Navigation Plan. ICAO GANP Portal. https://www4.icao.int/ganpportal/. Accessed 9 July 2021
SESAR Joint Undertaking: European ATM master plan Digitalising Europe’s aviation infrastructure : executive view, 2020th edn. Publications Office of the European Union, Luxembourg (2020)
Rihacek C, Haindl B, Fantappie P, Pierattelli S, Graupl T, Schnell M, Fistas N. L-band Digital Aeronautical Communications System (LDACS) activities in SESAR2020. In 2018 Integrated Communications, Navigation, Surveillance Conference (ICNS). IEEE, 4A1-1-4A1-8. (2018) https://doi.org/10.1109/ICNSURV.2018.8384880
Ben Mahmoud, M.S.: Aeronautical air-ground data link communications. Focus networks and telecommunications series. ISTE Ltd Hoboken NJ John Wiley and Sons Inc, London (2014)
ICAO. Global operational data link document. 2nd Edition (2013)
ICAO EUR-NAT Office. Data link performance and equipage report (2019)
ICAO EUR-NAT Office. Application of Separation Minima - North Atlantic Region (NAT ASM). NAT Doc 008. 1st Edition-Amendment 9 (2019)
Medina, D.: Geographic load share routing in the airborne internet. Paris Lodron Universität, Salzburg (2011)
SESAR Joint Undertaking. VDL Mode 2 Capacity and Performance Analysis (2015)
Ehammer M, Gräupl T, Polo E. AeroMACS data traffic model. In 2011 Integrated Communications, Navigation and Surveillance Conference (ICNS 2011). Herndon, Virginia, USA, pp 10-12 May 2011. IEEE, Piscataway, NJ, G5–1-G5–10. (2011) https://doi.org/10.1109/ICNSURV.2011.5935282.
Gräupl T, Mäurer N. An air traffic management data traffic pattern for aeronautical communication system evaluations. In 2019 IEEE/AIAA 38th digital avionics systems conference (DASC). IEEE, pp 1–6. (2019) https://doi.org/10.1109/DASC43569.2019.9081745
Gräupl T. FACTS2: extended simulation framework for ATM communication demand analysis of Europe. In 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC 2017). St. Petersburg, Florida, USA, 17–21 September 2017. IEEE, Piscataway, NJ, pp 1–8. (2017) https://doi.org/10.1109/DASC.2017.8102053.
Bresteau C, Guigui, S, Berthier P, and Fernandez JM. On the security of aeronautical datalink communications: Problems and solutions. In 2018 Integrated Communications, Navigation, Surveillance Conference (ICNS). IEEE, 1A4–1–1A4–13. (2018) https://doi.org/10.1109/ICNSURV.2018.8384830
EUROCAE. Safety and performance standard for air traffic data link services in oceanic and remote airspace. ED-122. Oceanic SPR Standard (2007)
EUROCAE. Safety and Performance Standard for Air Traffic Data Link Services in Oceanic and Remote Airspace. ED-122 Change 1. Oceanic SPR Standard. (2011)
EUROCAE. Safety and Performance Requirements Standard for Baseline 2 ATS Data Communications. ED-228A. Baseline 2 SPR Standard. (2016)
Eurocontrol and FAA. Communications Operating Concept and Requirements for the Future Radio System. COCR Version 2.0. (2007)
Kerczewski RJ, Budinger JM, Gilbert TJ. Technology assessment results of the eurocontrol/FAA future communications study. In 2008 IEEE Aerospace Conference. Big Sky, MT, 1–8 March 2008. IEEE Service Center, Piscataway, NJ pp 1–13. (2008) https://doi.org/10.1109/AERO.2008.4526376
Izadi A, Hinze N, Trani AA. Validating simulations of oceanic flights using data link communication messages. In: 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS). IEEE, 1–12. (2019) https://doi.org/10.1109/ICNSURV.2019.8735264
Marks T, Hillebrecht A, Linke F. Modeling air-to-air communication networks in the North Atlantic region (in review). In CEAS Aeronautical Journal (2023)
ICAO EUR-NAT Office. 2021. North Atlantic Operations and Airspace Manual. NAT Doc 007. V.2021–2 (Applicable from July 2021)
Funding
Open Access funding enabled and organized by Projekt DEAL. The work presented in this paper was part of the project IntAirNet that was funded by the German Ministry of Economic Affairs and Energy (BMWi) under the National Aeronautical Research Programme (LuFo) V-3 under the grant agreement no. 20V1708B.
Author information
Authors and Affiliations
Contributions
Conceptualization: AH, TM; Methodology: AH; Data Curation: AH, TM; Formal analysis and investigation: AH; Writing–original draft preparation: AH; Writing–review and editing: TM, VG; Funding acquisition: TM; Supervision: VG.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
All authors expressed their consent for this publication.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hillebrecht, A., Marks, T. & Gollnick, V. An aeronautical data communication demand model for the North Atlantic oceanic airspace. CEAS Aeronaut J 14, 553–567 (2023). https://doi.org/10.1007/s13272-023-00651-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-023-00651-4