
Abstract
The decades-old idea of electric-powered commercial flight has re-emerged alongside high expectations for greener CO2 emission-free air transportation. But to what extent can electric aircraft reduce the energy and environmental footprint of aviation? What should such aircraft look like, and how does their operation compare to conventional jet aircraft? What technologies are needed and which of them are already in place? This paper goes back to the basics of flight physics and critically analyzes some of the unresolved challenges that lay ahead. Current commercial operations are examined and the short-term effects of any electrification of short-range flights are quantified. Fundamental system components and basic design and operating concepts are analysed to highlight unavoidable constraints that often seem to be misunderstood or overlooked. These limitations are illustrated with a conceptual study of a full-electric FAR/CS-23 commuter aircraft and realistic estimations of its performance. It becomes clear that electric propulsion alone will not fully meet society’s expectations, even if key enabling technologies continue to develop as forecast. Nevertheless, this paper suggests that electrification may instead become one piece of a propulsion-technology mix that would more effectively address our short- and long-term emission goals.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Civil air transportation stands at a crossroads between rising global air traffic, overcompensating fuel efficiency improvements, and the rising social and politic will to reduce greenhouse gas emissions to limit global warming. According to the European Environment Agency, aviation was responsible for less than 3% and less than 7% of the global man-made CO2 and NOx emissions, respectively, in European countries during 2018 [12]. While these contributions may not be as large as the automotive or electric power generation sectors, there is still uncertainty surrounding its current and future environmental impact and aviation remains at the centre of political and social discussions in Europe and worldwide. The sector has already started to react to this challenge, which not only threatens its economic feasibility but also damages its reputation as a high-technology driver and reduces its appeal for future generations of users and professionals.
There are numerous political commitments to reduce future greenhouse gas emissions via national, regional, and worldwide alliances such as Sweden’s climate goals [34], Europe’s Flightpath 2050 [7], and the UN’s sustainability goals [43].
Along with the ongoing process of electrification in the automotive sector, electric propulsion is often presented to the public as a key enabler for urban air mobility (UAM) and a potential solution to the growing demand for greener air transportation [29, 35, 42, 45]. The increasing use of electricity, in one way or another, is nothing radically new in commercial aviation; interest in more electric aircraft (MEA) has been strong during the last 2 decades and results can be already seen at system and subsystem levels in modern airliners, such as the bleed-less system design of the Boeing B-787 and the partly electric-driven actuation systems on the Airbus A380 and A350. However, the new wave of enthusiasm for electrification is mainly based on the idea of replacing conventional propulsion systems with fully or partially (hybrid) electric ones. Indeed, new developments are beginning to show levels of gravimetric power and energy densities that enable propelling air systems. The use of electrical machines for propulsion reduces mechanical complexity and enables new technologies such as distributed electric propulsion (DEP) [4] and electric propelled vertical take-off/landing (eVTOL) [29, 42]. Furthermore, combining this with electric energy storage (full-electric propulsion) and renewable electricity production could offer emission-free operations at a relatively low energy cost.
Beyond disrupting the commercial aviation sector, it is speculated that these new technologies may create or re-open currently unprofitable markets by introducing new concepts of air transportation such as the so-called \(\hbox {UAM}\) segment [16, 42]. A significant proportion of the public, the media, and even political actors place high expectations on these technologies, even though fundamental questions remain open. For instance, \(\hbox {UAM}\), based on \(\hbox {eVTOL}\) vehicles (with installed power between 200 and 400 kW per passenger), is expected to achieve sufficient capacity to solve large-scale transportation problems in crowded urban areas while reducing the environmental footprint of commuters. While the technical development of this technology is being followed with great interest and huge economic investments, concerns about the feasible (or admissible) size of such a market—taking into account the global environmental and socio-economic impact of a mass use of resource-intensive \(\hbox {eVTOL}\) vehicles, besides technical barriers—arise [16, 39].
Similarly, many recent publications address particular aspects of electric-propulsion technology and electric aircraft design; however, few of these present a comprehensible overview of the potential impact and underlying challenges of using this technology as one of the main pillars of commercial aviation’s short-/medium-term strategy for reducing its environmental footprint. Hepperle [20] is perhaps one of the most complete reviews covering the wide range of technical aspects that enable electric-powered flight. In addition to synthesising the main technical difficulties and the status of technologies as of 2012, that publication also includes a study of a hypothetical, 32-passenger, electric-powered derivative of a regional aircraft and compares its performance to the conventional baseline. The article presented here follows a similar approach and goes back to the basic principles of design and operation to highlight both the constraints and the possibilities of full-electric propulsion for commercial aviation. In contrast with other publications, this paper also contextualises the impact of electrification by presenting an analysis of the air transportation market and combining it with a design exercise of a more-feasible, 19-passenger, FAR/CS-23 compatible commuter aircraft with current technologies. While hybrid-electric systems—especially those interoperating hydrogen fuel and electricity generating fuel cells—may offer a balanced and advantageous solution for some of the applications discussed here, their variety and complexity make it difficult to compare different scenarios and they are, therefore, not included in this investigation.
2 A recent picture of civil air transportation
It is sometimes claimed by stakeholders and the media that the upcoming generation of electric-powered aircraft will bring a significant benefit to the energy and environmental footprint of civil air transportation. However, first of all, what does civil air transportation look like today? How significant could electrification be? Previous comprehensive studies of commercial operations records, such as Lee et al. [28], have revealed historical trends and projections that are still relevant. However, this study will present an updated overview of the air transportation market based on recent data, focusing on transport volumes and energy-intensity figures.
2.1 Transport volume and flight distance
There is no universal indicator of air transport activity. Two of the most descriptive figures are usually the number of operations (departures) and productivity, where the latter can be expressed in revenue-passenger-kilometres (RPK) or, including all kinds of payload, in revenue-payload-kilometres [kg–km]. From a logistics point of view, focusing excessively on the number of flights can be deceptive as some segments appear to be more significant than they actually are. Figure 1 shows the number of flights according to their stage length (great-circle distance) and aircraft class for all reporting U.S. air carriers and operations to, inside-, and from the U.S. during 2017, as provided by the U.S. Department of Transportation [44]. The data show that the twin-jet class dominates the market by number of flights for stage lengths of 200 km and above. Turboprop operations lose significance after < 500 km, piston-engine aircraft after 200 km, and vertical-lift operations are negligible even for the shortest routes. According to departure numbers, the very short-range segment may seem to be a fertile ground for the electric commuter business; however, these data also reveal a hindrance: it gives an idea of how many flights cycles air carriers need to survive in the short-range business. As will be explained later, the future electric aircraft will not be economically suitable for fast battery cycling.

Departures by stage length for passenger and cargo flights to, inside, and from the U.S. during 2017. The black solid line represents the cumulative fraction of the total. Raw data from [44]

Revenue payload by stage length for passenger and cargo flights to, inside, and from the U.S. during 2017. The black solid line represents the cumulative fraction of the total. Raw data from [44]
Coming back to the logistic problem of air transport, business volume, energy consumption, and emissions are more closely correlated to the payload exchange than to the number of flights. Based on the same U.S. air traffic data from 2017 [44] as before, Fig. 2 shows the amount of revenue-payload flown (including passengers, cargo, and mail) along with the distance over which it was transported. The dominance of the twin-jet class here is absolute, turboprops are less significant than suggested by departures, and both piston and vertical-lift operations are negligible even for the shortest routes. These data also reveal some interesting details: about 60% of the cumulative revenue payload was transported over a distance of 2000 km or below, which scales almost linearly to approximately 30% at 1000 km or below. About 12% was carried up to 500 km, and this falls to about 4% for the first 300 km. Hence, despite the large volumes in the short–medium range, the low end of the short-range segment is much less significant: we can observe a large number of departures for a relatively modest volume of revenue payload, which is mostly provided by twin-jet operations at high-subsonic flight speeds.
2.2 Energy and environmental efficiency
The next question is: How much are we paying to transport all these payload volumes? How efficient is this? Approaching the logistic problem from an environmental point of view and disregarding speed, energy efficiency can be understood as a measure of productivity delivered (revenue-payload-kilometre) per unit energy consumed or environmental cost. Hileman et al. [22] name this metric Payload Fuel Energy Efficiency (PFEE). It is slightly modified here to facilitate the comparison to usual electric energy figures, by expressing the cost in terms of kWh instead of MJ.
The DoT dataset [44] also provides information on reported fuel consumption during real operations for a wide range of aircraft types and missions in recent decades. The samples were considered sufficient to produce a yearly fleet-wide average efficiency index, taking into account the total distribution of passenger and cargo flow, flight hours, and load factors. Fuel consumption was translated into energy consumption following the same assumptions as by Hileman et al. [22], i.e., accounting for the total chemical energy spent in the mission from block to block and not considering the energy spent in well-to-tank processes. The energy losses and the environmental footprint caused by well-to-tank processes are not negligible, especially when compared to an electric-propulsion scenario that includes the electricity-creating process. However, these processes are difficult to quantify due to large geographical variations and lack of transparent information. See Edwards et al. [9] for more information on these processes in a European context.
Figure 3 shows the resulting evolution of the fleet-wide energy efficiency along with the relative change in total revenue-payload distance achieved during the last 2 decades. According to these estimations, aviation is not only transporting more than ever before, but also more efficiently. Two of the factors that may have contributed to this improvement are the introduction of more fuel-efficient aircraft and the general increase in load factor for passenger flights. Note that the latter has a significant effect and that it is independent of the propulsion technology used. To put this into perspective, the average fleet-wide energy efficiency in 2017 was approaching that of a typical utilitarian car (6 l/100 km) with two occupants while being one order of magnitude faster over large distances. Although transportation speed is not included in this efficiency metric, it plays an important role in productivity and should be taken into account when comparing aviation to other means of transportation.

Evolution of the fleet-wide energy efficiency and total revenue payload-distance during the last 2 decades. Estimated using data from [44] including passenger and cargo flights to, inside-, and from the U.S.
The available information on reported fuel consumption for operations during 2017 was also used to develop a model for average energy efficiency for each stage length segment. This model was then applied to the operations dataset to obtain an estimate of the total energy consumption for each segment. The result is plotted in Fig. 4 together with the distribution of departures and revenue-payload-kilometres from Figs. 1 to 2. Moreover, energy consumption could also be associated with emission of pollutants. For instance, Hileman et al. [22] consider a proportional CO2 emission correlation of 263 g/kWh, or—with a \(19\%\) overhead considering the entire well-to-wheel cycle—approximately 313 g/kWh of CO2 emissions per delivered kWh. Nevertheless, uncertainties related to the proportionality of the emissions of different pollutants and the added effects of high-altitude operations make it difficult to establish a straightforward relationship [3, 6].
In any case, Fig. 4 illustrates that directly associating the number of flights or payload distance with energy consumption can be misleading. If, in a hypothetical near future, we were to enforce all commercial flights under 500 km (about 25% of departures and 10% of payload) to be performed with full-electric aircraft, we would only shift about 5% of the total energy consumption. It seems plausible to achieve a similar or greater impact with more straightforward and immediate measures, such as enforcing the retirement of the oldest long-range aircraft in existing fleets.

Distribution of number of departures, revenue payload, and estimated energy consumption according to stage length for passenger and cargo flights to, inside, and from the U.S. during 2017. Elaborated with data from [44]
3 Range and payload capacity
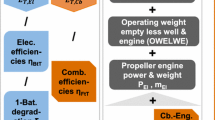
Both aircraft types use the concept of stockpiling to achieve the mission. The kerosene-fuelled aircraft has the advantage that it: (a) takes the oxidizer oxygen “for free” and “just in time” from the ambient air and (b) discharges the burned fuel in the form of emissions directly into the atmosphere. The electric aircraft, however, has to carry the whole “fuel and oxidizer” battery weight over the total distance. The consequences are severe and cannot be only expressed as a higher maximum take-off weight (MTOW), but influence the whole performance of the aircraft. Figure 5 shows the large operational difference between conventional and full-electric aircraft resulting from the different weight characteristics due to the constant mission mass of the electric aircraft.

Comparison of a conventional fuelled (left) and a battery-powered aircraft (right) (axis not to scale!)
3.1 Basic range remarks
The cruising range of an aircraft (neglecting climb and descend) can easily be estimated using the so-called Breguet range equation, mostly known (for approximately ca. 100 years) in the following notation for jet-engine aircraft:
Thus, range is a direct result of the aircraft’s aerodynamic quality (L/D), the overall propulsion system efficiency (expressed by the term thrust specific fuel consumption (TSFC)), and the fuel weight fraction (\(W_{\mathrm{{TO}}}/W_{\mathrm{{final}}}\)). Within these three classical aircraft design domains, namely aerodynamic, structure (weight), and propulsion, significant advantages have been achieved in the past which have been partly sacrificed by a high cruise velocity (\(v_{\mathrm{{cruise}}}\), often Mach 0.82 for civil transportation jet aircraft) and the extended range of new aircraft types (thus too large and too much structure).
In the case of a full-electric aircraft with its constant mission weight (emptied batteries are not thrown overboard and do not become lighter with their state-of-charge (SOC)), the Breguet equation becomes
with
-
R (cruise) range (m)
-
E (useable) battery gravimetric energy density (Ws/kg)
-
\(M_{\mathrm{{batt}}}\) battery mass (kg)
-
\(M_{TO}\) total aircraft mass (take-off mass) (kg)
-
g Earth surface gravity, usually 9.81 (m/s2)
-
L/D aircraft aerodynamic efficiency (glide ratio) (-)
-
\(\eta _{\mathrm{{total}}}\) total propulsion system efficiency (-).
Thus, the all-electric aircraft range is a direct consequence of the mass-effective battery pack energy density [usually expressed in Wh/kg] and the battery pack weight fraction (\(M_{\mathrm{{batt}}}/M_{\mathrm{{TO}}}\)). While the formula describes a very simple linear relationship, playing around with the values and seeing the range consequences directly are an eye-opener; the reader is encouraged to do so on using the interactive Breguet range equation online calculator created by Ferrier [14].
Besides the weight penalty and the lack of operational flexibility shown in Fig. 5, it can be observed in a classical constraint- (or sizing-) diagram that some design factors are hard to meet; for instance: required runway length for take-off and landing at \(\hbox {MTOW}\), approach speed, increased energy requirements (due to the constant maximum weight), and reserves (missed approach, detour to alternate, loiter). See Fig. 10 in Sect. 6.3 as an example of a constraint diagram for a full-electric aircraft.
3.2 Fuel to battery comparison
Often, battery- and kerosene-specific energy densities are compared directly with or without including an estimated propulsion drivetrain efficiency, see Eq. 3. This, however, neglects the above-mentioned operation difference; empty batteries are usually not thrown overboard due to economic, environmental, and safety issues
Even neglecting the operational disadvantage of battery-driven aircraft, the relative/absolute specific energy ratios between electricity and kerosene are
The gravimetric energy density of batteries is greatly overestimated by many people (ask someone how many Watt hours one gets out of a Mignon AA battery!Footnote 1). A Li-ion battery with typical specific energy of 250 Wh/kg is equal to 90 kJ nutritional value per 100 gr food, which is the value of a fresh tomato! The batteries we dream of seeing in the long-term future may have the energy content of low-fat milk with 1.5% fat (47 kcal/100 gr \(\approx\) 550 Wh/kg) [20]. Even compared with today’s state-of-the-art 70 MPa pressurised hydrogen tank designs with a tank storage densityFootnote 2 of only 5.7 wt%, as realised in the Toyota Mirai car [41], the hydrogen storage system-specific energy density outperforms batteries by a factor of four.
One alternative expression of the energy-to-weight ratio, mimicking the breaking length used to express the specific strengths of material, is in terms of its hypothetical self-lifting capacity. This is the fuel-specific energy expressed as potential energy applied to its own weight in a fixed gravity (g) environment, resulting in a virtual height that the fuel can lift itself
The resulting hypothetical self-lifting capacity values shown in Table 1 are a more descriptive representation of the specific energy. Here, the factor of approximately 50 between battery- and kerosene-specific energy is clearly visible, as is the performance gap between kerosene and pressurised hydrogen systems (with a factor of 6.2).
4 Electrical (propulsion) systems
Similar to the problem of how to compare jet engines with shaft power delivering engines, a direct comparison of electric (shaft-power delivering) motors and jet engines is also non-trivial and requires considering the operation point (especially the cruise Mach number) within the comparison.
4.1 Electric motor
Compared to jet engines that deliver thrust for the sake of propulsion, electric motors deliver (shaft) power to operate a propeller or a fan. The direct comparison of an electric aircraft with an “equal” jet aircraft is therefore not possible. In an extremely simplified model, with the basic definition of the lift-induced drag and the assumption of a constant parasite drag coefficient \(C_{D0}\) and a constant Oswald span efficiency parameter e, the following required trust \(T_\mathrm{{req}}\) and required power \(P_\mathrm{{req}}\) exist for the total drag D relationship for steady-state flight:
Furthermore, assuming a constant thrust- (jet engine) or power-specific (electric motor) fuel or energy consumption, the following relationship for the best fuel economic cruise lift coefficient applies:
Equation 7 shows that there is a natural speed disadvantage for electric aircraft of the same weight and similar geometrical properties (as the wing reference area \(S_\mathrm{{ref}}\)) if the parasite drag is not reduced in some unrealistic way.Footnote 3
Neglecting the speed issue (and thereby the cost and utilization disadvantages), electric-driven propellers/fans offer the following advantages compared to jet engines:
- Pro1:
-
Ambient temperature independent motor efficiency \(\eta _\mathrm{{elec,motor}}\)
\(\Rightarrow\) Free choice to choose suitable flight altitude.
- Pro2:
-
Efficiency and power density are rather independent of the engine size
\(\Rightarrow\) Designers are free to split up and position the propulsion system (\(\hbox {DEP}\)).
- Pro3:
-
Excellent motor efficiency over wide operation range (RPM and power)
\(\Rightarrow\) Operational freedom; good efficiency even at low-power settings required for economic cruise velocities or, e.g., surveillance missions.
Other frequently named advantages of electric propulsion are reduced maintenance costs, enhanced reliability (both to be shown), enhanced lifetime, weight savings, simpler system architecture, reduced complexity (reduction of parts and especially reduction of rotating parts), and safety improvements (absence of fuel, fuel leakages, uncontained engine failure, risk of fire, and no hot components).
The main challenges—apart from the low technology readiness level (TRL) for aircraft propulsion—are the thermal control of all power electric components, the magnetic fields including the electromagnetic compatibility (EMC) and electromagnetic interference (EMI) issues, and insulation problems for higher (DC) voltage systems due to arching. The latter topic is closely related to the electric motor size and current limitations on the electric cables. For applications exceeding 1 MW, superconducting components are seen as an essential technology, with the first superconductive electric motor for ground-based applications available since 2018 [15].
4.2 Battery
The choice and performance of the energy carrier is one of the most critical aspects for the feasibility of electrically powered aircraft, and one is therefore of the most polemic topics. The ground transportation industry is already basing most of its electrification process on the use of rechargeable electric battery cells for energy storage or energy buffering on-board vehicles [10]. This, together with their popularity in consumer electronics, has pushed the development of electric batteries through a tremendous improvement, starting with acid-lead type batteries, via nickel–cadmium and other types, to alkaline and lithium-ion (Li-Ion) type batteries. The latter are nowadays perceived at user level as safe and reliable. Electric batteries, in their latest chemistries, also seem to be the preferred choice for the first generation of commercial electric-powered aircraft, although they are not necessarily the only option. See Misra [31] for more information on this topic.
Rather than a detailed discussion on the state-of-the-art chemistries and performance, the aim is here to remark on certain critical aspects of electric battery integration that are often overlooked or misunderstood. Perhaps, the most important of these is the value of specific energy that can be used for the aircraft sizing and performance estimations. For cells based on Li-Ion chemistry, the current commercial state-of-the-art specific energy is often mentioned to be somewhere between 200 and 300 Wh/kg, with even higher values occasionally reported in special experiments under very specific discharge conditions [17, 31]. The step between these values and the useable performance in “real-life” operation is, unfortunately, large. Beyond the additional weight of packing individual cells into manageable packs and adding monitoring, thermal, safety, and charging systems in the form of a battery management system (BMS), there is also a significant amount of energy that cannot be used for everyday nominal operations. Figure 6 conceptually describes the main factors that must be considered when assuming a battery-specific energy at system level, understanding system level as one or more battery packs fully integrated on the aircraft including all installation features, following the common AIAA nomenclature [1].

Conceptual representation of the adverse factors affecting the specific energy value of a typical state-of-the-art battery, from its individual-cell form to “real-life” use integrated in a commercial aircraft. Values are merely indicative
The mass and volume overhead for battery packs can be observed in readily available electric road vehicles such as the Mercedes EQC (believed to be 123 Wh/kg for full-depth discharge) and Tesla Model 3 (best in its class, with an estimated 157 Wh/kg from 247 Wh/kg cells in full-depth discharge [37]). However, it is unclear whether these values include the mass of installation or integration elements and the liquid cooling system. In any case, it is expected that eventual airworthiness, crashworthiness, environmental protection, and general safety requirements for the use of these batteries in commercial aviation will increase, rather than decrease, the mass and volume overheads observed in road vehicles.
4.2.1 Safety and degradation margins
Regarding useable energy, the nominal energy values given for commercial cells correspond to a full-depth discharge cycle, i.e., from 100% \(\hbox {SOC}\) to the minimum acceptable voltage (often between 2.5 and \(3.0\,V\) for \(\hbox {Li-Ion}\) cells) and under a light load. Typical cells using this chemistry see their cycle life directly correlated to the depth and rate of the discharge cycles. For regular use in commercial service, discharge cycles should ideally be as small as possible and never exceed 80% depth (20% \(\hbox {SOC}\) remaining from a full charge) if the battery is expected to endure at least 500 cycles with acceptable performance. This means that at least 20% of the energy cannot be considered useable in nominal missions, although it may remain available for emergency situations if the battery is discarded afterwards (see Fig. 6).
On the other hand, the cell degradation after such a number of cycles may reduce the available energy by an additional 20% (or up to 50%, depending on how aggressive the charge and discharge cycles are). Unless it is accepted that the aircraft is assigned to shorter routes according to its battery health, this degradation should also be taken into account when designing the nominal mission. Bugga et al. [5] provide some examples of life-cycle performance of commercial cells tested for space applications. Note that these tests correspond to much lighter cycles than those expected for aircraft propulsion uses.
Furthermore, impedance losses will vary depending on battery health, temperature, and rate of discharge, where the latter is directly linked to the power demand. The mission should therefore be designed to not overstress the battery and to minimise energy losses in the form of heat during the climb phase; otherwise, the battery must be oversized accordingly. It is also necessary that a thermal management system (TMS) (as part of the \(\hbox {BMS}\)) not only absorbs the excess heat, but also maintains an acceptable minimum temperature during idling conditions, during recharge, and before take-off, potentially through active heating.
4.2.2 Future battery improvements
Battery technology has undergone tremendous developments during the last 2 decades. Li-ion cells are now available commercially in the 2170 (or 21700) format, which has a specific energy of 260 Wh/kg while delivering a stable discharge rate of 1C (100% depth-of-discharge (DOD), according to our own experimentation). Historically, the performance of Li-ion chemistry has increased between \(5\%\) and \(5.5\%\) per year [17]. Current forecasts predict higher values due to the R&D push by the automotive sector, 400–500 Wh/kg at cell level in the 2022–2025 time-frame [31]. For aviation applications, at least 3 years should be added to the automotive timeline, making energy densities around 500 Wh/kg at cell level available around 2028.
The maximum theoretical weight effective energy of today’s Li-Ion chemistry is however limited to approximately 600–700 Wh/kg [17, 31]. Values as high as 1000 Wh/kg, which equals the mass-specific (chemical) energy level of hydrogen peroxide (\(H_2O_2\)) [20], would require new battery chemistries such as Li-air and Li-sulphur. The car industry, which is crucial to the current development of battery technology, is however unlikely to continue pushing the specific energy boundary beyond 500 Wh/kg at cell level, focusing instead on cost reductions and charging rates [11]. It should also be considered that thermal-runaway risk becomes more critical when increasing mass- (and volumetric-) specific energy levels, and hence, safety could become a major concern for the use of these technologies in aerospace applications. See, for example, the Boeing B-787 Li-ion battery incident investigation by the NTSB [33], highlighting the need for sophisticated \(\hbox {BMS}\) in combination with sound containment and thermal runaway prevention measures.
4.3 Power electronics
Most energy forms used on-board conventional aircraft—typically from chemical (fuel) into mechanic, hydraulic, and pneumatic power—suffer from significant conversion losses and rather inefficient control techniques, such as restrictive throttling. In contrast, and thanks to enabling advances in solid-state power electronics, the adaptability and efficiency of electric power is much higher and also eliminates the system inherent low thermodynamic efficiency of a heat engine. However, besides many advantages, there are also certain bottlenecks that must be addressed:
- Con1:
-
Power limitation:
due to maximum voltage and current levels
- Con2:
-
High currents:
limit of conventional cables; resistance losses
- Con3:
-
High DC voltages:
insulation (weight, volume, and risks) and arching (switch design: complex, bulky, and maintenance effort).
Superconduction is often considered as a potential solution to overcome the first two issues. Superconducting materials have reached important improvements in recent years and cooling requirements are being progressively reduced. The introduction of the first commercially available superconducting plug-and-play electric motor in 2018 [15] is a good example of the maturity of this technology.
Limitations in specific power density are also set by field strength of the electromagnetic fields caused by the huge currents. \(\hbox {EMC}\) is one of the critical design challenges that will require more attention in future \(\hbox {MEA}\) or full-electric concepts. For instance, \(\hbox {EMI}\) caused unexpected huge problems in one of the first full-scale \(\hbox {DEP}\) ground tests during the LEAP Tech test campaign for the NASA X-57 Maxwell project [32].
5 Alternative concepts
The all-electric aircraft is just one possible more environmentally friendly future configuration. Other power alternatives include:
-
1.
Conventional design and the use of synthetic fuels/e-fuels or biofuels
-
2.
Hybrid solutions with a wide variety of hybridisation (of power and energy)
-
3.
Gas fuel powered: pressurised or liquid hydrogen, liquefied petroleum gas (LPG), and liquefied natural gas (LNG)
-
4.
Fuel cell-powered concepts
-
5.
Other battery- or electric energy-storing technologies such as liquid batteries, superconductors, etc.
-
6.
Other just-in-time energy recuperation concepts or directed energy (from ground, mother-vehicle or space).
While the last option seems highly unrealistic with today’s technologiesFootnote 4, the first alternative listed above can be achieved with existing technologies. Globally, there might be no best technology, but there might be a best system architecture for each application, depending on the vehicle’s range, payload capacity, and velocity (see also the Technology Coexistence topic in Sect. 7.1).
5.1 Sustainable aviation fuels
There is a long list of available synthetic fuels, including different types of e-fuels. E-fuels are produced by electric power-to-X (PtX) processes that include two characteristics: the electrolysis of water to gain (e-)hydrogen and the use of captured CO2 from the air or any concentrated source such as flue gases [46]. Both liquid (power-to-liquids (PtL)) and gaseous fuels (power-to-gas (PtG)) can be refined using various chemical processes. The moderated process efficiencies of any power-to-X conversion ranges between 53% and 70% depending on the process and material type [18]. The first synthetic fuel test plants are already in operation [30], but large-scale feasibility and profitability have not been reached yet and will depend mainly on CO2 emission costs/certificates and the availability of green electric energy.
6 Application example: electric FAR/CS-23 commuter aircraft
At this point of the discussion, it may be clear that the possibilities for a successful introduction of a commercial, full-electric-propulsion aircraft in the short- or mid-term future are quite limited. Beyond certain niche applications, it is also doubtful that sufficiently strong business cases exist at the very low end of the air transportation market, at least without active support from political actors and policymakers. Nevertheless, in the near future, a logical first attempt to balance the current technology limitations and a minimum level of profitability could consist of a small commuter aircraft certified under the FAR/CS-23 regulation specifications [8]. Exploring the design of such a full-electric aircraft is an interesting exercise that reveals the architectural challenges, the sizing constraints, and the potential performance figures that can realistically be expected in different battery-technology scenarios.
6.1 Design rationale
This case was studied using typical conceptual design methods, low fidelity tools, and a basic optimisation strategy. The aim was to define a hypothetical full-electric aircraft concept and a transport mission profile that represent the maximum range and performance achievable with state-of-the-art technologies or with those currently at high \(\hbox {TRL}\). Range (energy efficiency) at full payload was given priority over other aspects such as development cost, passenger experience, derivative use, and flight speed. The main top-level requirements were set in advance, and are listed in Table 2.
6.2 Configuration
Only tube-and-wing configurations were considered. In an effort to reduce the cross section and wetted area, the absolute minimum fuselage dimensions were defined first: 19 passengers were seated two abreast (\(30''\) pitch) over an 8-metre seating section. Considering a minimal volume for cockpit, cargo (1.7 m3), and systems, the total tube length rose to 14.5 m with a maximum width of 1.8 m and a maximum height of 2.0 m. Due to the mission and propulsion characteristics, the concept rapidly converged into a high-wing, T-tail configuration with four 300 kW-class motors driving large 2.8 m propellers. While a twin-motor configuration would probably be more energy- and weight-efficient, the balanced-field-length requirements with \(\mathrm{one-engine-inoperative}\hbox { (OEI)}\) would not be met even with the most powerful electric motor demonstrated in flight at the time of writing, the 560 kW Magnix magni500 [19]. Preliminary volumes for landing gear allocation and wing fairing were incorporated for drag calculations. An overview of the resulting configuration is shown in Fig. 7.

Representation of the selected configuration modelled with the OpenVSP tool for visualisation purpose
6.3 Sizing
The million-dollar question here is: “How big can the battery mass fraction be?” Assuming that the payload is fixed, and that the battery system takes the conventional place of fuel, the key lies in minimising the aircraft’s basic empty-mass fraction. A straightforward analysis of similar aircraft, as shown in Fig. 8, indicated that any empty-mass fraction under 0.50 would hardly be feasible with traditional materials and manufacturing techniques. For the sake of optimism, it was decided to accept an empty-mass fraction as low as \(M_\mathrm{{empty}}/M_\mathrm{{TO}}=0.42\), assuming a non-pressurised cabin (limiting commercial operations to FL80 and below) and the extensive use of composites (manufacturing cost not considered), taking into account the lower installed weight of electric motors and that certain fuel-related systems would be transformed into battery-system weight. The resulting mass breakdown and the relatively simple margin for design trade-offs are illustrated in Fig. 9.

Empty-mass fractions for various existing aircraft and the proposed concept

Conceptual mass to range diagram for a 19-passenger, CS-23-compliant fully electric commuter aeroplane
The mass allowance for the battery system (battery and ancillary) was 3000 kg (\(M_\mathrm{{batt}}/M_\mathrm{{TO}}=0.35\)), which could be located near the motors to minimise power-distribution complexity and weight. Considering just a battery composed of state-of-the-art Li-ion cells in a high-density packing, the minimum volume required would be between 1.5 and 2 m3. Such a volume is comparable to a full wet wing or to four nacelles slightly larger than those of conventional turboprops. Positioning the battery system in the nacelles turned out to be the most convenient option in the case presented here. This placement minimises the length of the high-power wiring if it is assumed that each nacelle can also be connected directly to the recharging system while on the ground so that a centralised charging port with its heavy cabling is not needed. However, it was calculated that the battery mass would induce significant inertial loads on the wing structure upon touchdown. Since structural weight played a more prominent role than flight speed, wing-bracing struts were introduced as a solution to minimise weight while keeping a high aspect ratio (\(A\!\!R\)) for optimal aerodynamic efficiency at low speed. While the \(A\!\!R\) was indeed limited by weight and loads, the wing area required a difficult compromise between acceptable cruise performance and take-off/landing field-length requirements, as shown in Fig. 10. The landing field length at \(\text {maximum take-off mass}\hbox { (MTOM)}\), calculated using the analytical method proposed by [40], was particularly limiting. Low-speed, natural laminar-flow aerofoils were selected for wing and tailplanes, where the latter were sized according to the tail-coefficients method [36]. Single-slotted flaps were assumed to cover \(60 \%\) of the wingspan.

Constraint diagram showing how the design point is a compromise between take-off, landing performance, and a minimum acceptable cruise speed and altitude
The drag polar was estimated as the sum of the parasitic drag, lift-induced drag and longitudinal-trim drag. The parasitic or zero-lift drag was estimated using a typical drag bookkeeping method based on the CAD-computed wetted areas, the form-factor equations proposed by Jenkinson [25] (wing, fuselage, tailplanes, struts) and Hoerner [23] (fairings, nacelles), interference scaling factors for junctions (1.2) and struts (1.3), and a variable extent of laminar flow on surfaces outside the propeller wake, disregarding de-icing boots or any leading-edge devices. The lift-induced term was estimated using the typical span efficiency method, based on the aspect ratio and assuming no contributions from the struts or fuselage [36].
The primary objective of the overall sizing optimisation was to maximise mission range, cruise speed, and altitude while meeting the above-mentioned requirements. Studying the system sensitivities revealed that, as expected, the design parameters were mainly dominated by the structural mass fraction: every unit of structural mass that can be replaced by batteries has a strong impact in the range. The design space was explored manually due to the very limited number of possible solutions. The chosen design point produced the following characteristics at full payload:
Note that, in contrast to the traditional turboprops, the resulting design is optimised for very low flight speeds where the benefits of the high aspect ratio wing outweigh the drag penalty of the wing struts. Although the previous generations of turboprops such as the Fokker F-27 can reach a maximum L/D of up to 18 under certain conditions [38], the aerodynamic efficiency assumed here may still be considered optimistic for a real-world scenario. These values are indeed based on optimistic assumptions, and aim to represent an upper boundary of what could be technically achieved with a modern clean-sheet design with no stringent cost constraints. Due to the challenging structural mass-fraction requirements, it is assumed that such a design would in any case feature a full carbon-/glass fibre-reinforced plastic construction with shape-optimised junctions and a smooth finish on all surfaces. Besides the significant comfort sacrifices already made when sizing the cabin volume, it is assumed that the cleaner integration of the electric-propulsion system, the simple high-lift devices, and the fixed centre of gravity may facilitate further shape optimisation and minimum interference effects at a given operating point. No aerodynamic effects from de-icing, cooling, or communication systems have been considered.
6.4 Energy storage assumptions
The battery design life was assumed to be 1 year with an average of three flights per day, equivalent to approximately 1000 charge-discharge cycles. The discharge rate was assumed to be 1C (available battery energy over 1 h) and a typical \(\hbox {DOD}\) of \(80\%\), as explained in Sect. 4.2. Table 3 presents the main factors used to estimate the transition from cell to system level, as well as the remaining useable energy after 1000 cycles. With these assumptions, a state-of-the-art Li-ion battery with 260 Wh/kg at cell level would present a useable energy density of 128 Wh/kg at system level after 1000 missions flown.
6.5 Mission-range analysis
The mission was defined as a simple one-leg route including taxi, take-off, climb, cruise, descent, landing, and taxi. Although avoiding weather phenomena completely would require higher altitudes, the non-pressurised cabin limited the cruise altitude to 8000 ft. The maximum-continuous-power climb was performed at Mach 0.22 (approximately 140 kt) with an average L/D of 20.6, while cruise and descent were performed at the required minimum cruise speed at Mach 0.30 (approximately 200 kt) and an L/D of 17.9. Higher and faster cruise conditions could not, in any case, outweigh the energy invested in the climb phase for very short missions. Table 4 summarises the simulation results obtained for different scenarios discussed below.
-
(A)
represents the last mission of the battery design life according to the previous assumptions. There is no allocation for reserve or systems energy, except if assumed that the batteries can be fully depleted (\(100\%\) \(\hbox {DOD}\)) in case of need or emergency. In such a situation, the remaining \(20\%\) (96 kWh) is equivalent to 10 min or 60 km at cruise speed.
-
(B)
is similar to (A), but it considers that all nominal missions are allowed to fully deplete the battery (\(100\%\) \(\hbox {DOD}\)). No allocation for reserve or systems energy. Alternatively, it can represent improved cells and/or integration that deliver an equivalent useable energy at system level.
-
(C)
is similar to (B), where all missions reach \(100\%\) \(\hbox {DOD}\), but it also considers that the batteries are new and perform according to the nominal specifications. No allocation for reserve or systems energy. Alternatively, it can represent improved cells and/or integration that deliver equivalent useable energy at system level.
-
(D)
represents a hypothetical scenario where better cells or better integration are able to deliver such a useable specific energy at system level. All energy is still used for nominal propulsion, with no allocation for reserve or systems energy.
-
(E)
is similar to (D) but presents an even higher useable specific energy at system level, which may be representative of a battery technology available from a long-term perspective.
6.6 Key enablers to make it work
The simulation results from the design study, shown in Table 4, support the idea that it may be technically feasible to realise an FAR/CS-23 compliant full-electric aircraft capable of very short routes with the current technology—assuming a short battery service life and that the energy demand of on-board systems can be kept sufficiently low. From a long-term perspective, as in case (E) with an integrated battery system with a specific energy of 400 Wh/kg, such an aircraft could theoretically fly a 600 km mission even by the end of the battery’s service life. However, an important obstacle to commercial flights would arise from the current operation regulations regarding energy (fuel) reserves on board. Even in optimum circumstances, this type of aircraft would be required to have a minimum energy reserve for 45 min of additional endurance [24]. It seems reasonable to believe that only a substantial change or admissible exception to these regulations would enable commercial operation with this type of aircraft in the near future, provided that the same level of safety can be achieved by means other than extra energy.
Additionally, operating over a meaningful stage length would require the battery-specific energy to double the current levels while maintaining or improving the current specific power and durability levels. With today’s efficiencies, lithium-ion chemistries are unlikely to yield a system-level specific energy of more than 250 Wh/kg in the 2035 time-frame, while novel lithium-ion chemistries could have the potential to double this figure as soon as 2025–2030 [17, 31]. There is also a significant margin for improvement in the transition between battery cell level and system level: battery integration and packing efficiency require more exploration by both developers and regulatory organisations to evaluate future certification standards.
Regardless of the battery technology, some design challenges are likely to remain: improving the short-field performance of this kind of aircraft requires important sacrifices in other areas such as cruise performance. A clear example is the wing loading trade-off. While the effects of a high \(\hbox {MTOW}\) at take-off are like those on a conventional aircraft and can be partially compensated for by a high power-to-weight ratio, the landing performance at such a weight is significantly degraded.
7 Discussion
Beyond the technical feasibility, it may be questionable whether there is a sufficiently large market to operate full-electric aircraft profitably. On very short routes, there is usually a direct competition with other land and water modes of transport offering either better economics or shorter door-to-door times. It seems plausible that this kind of air operations might focus on special locations with no strong competitors due to a lack of infrastructure or complicated geography, as in the case of some regions in Norway [26] and the Orkney Islands in Scotland [2]. In any case, it should be considered that on very short routes, the operating cost of crew and personnel is usually more significant than the energy cost, and that there may not be strong economic reasons to prefer electric propulsion over conventional as long as this is not politically enforced by emission certificate costs or financial subsidies.
It may also be questionable whether these possibly unprofitable operations should be subsidised or enforced with the purpose of reducing civil aviation’s environmental impact in the short term. The study results indicate that even if all short-range operations (500 km) are performed with full-electric aircraft supplied from renewable sources, the shift would only cover a very small fraction of the total payload flow and affect no more than \(5\%\) of the total energy consumed by commercial aviation. Taking into account the low \(\hbox {TRL}\) of some of the enabling technologies involved and the limited final impact, it may seem more reasonable to prioritise other short-term measures with higher impact potential.
7.1 Technology coexistence
Technology development can either be a steady process, denoted as (design) evolution or a rapid change—usually imposed by a new technology—denoted as a (design) revolution. Especially in aeronautics, the technology maturity process from low to high \(\hbox {TRLs}\) is a slow and costly process. History shows that, even with vast investments, the slanted \(\hbox {TRL}\)-wave cannot be shortened significantly. In reference to its maturity state, the electrification of flight might actually be suffering from an excess of visibility and inflated expectations which will probably lead to a harsh encounter with reality, as described by the so-called Gartner technology hype cycle [13], depicted in Fig. 11.

Gartner’s technology hype cycle. Is electric-powered flight about to follow the red line?
7.1.1 Sweden’s car energy and technology mix
An example of misguided technology application by governmental aid is the automotive segment in Sweden. Historically, the overwhelming majority of cars had been petrol cars. Then, in the 1990s, there was a great subsidy of ethanol cars, which vanished when high-efficiency diesel cars were promoted as the best solution and ethanol tax benefits vanished. Nowadays, exaggerated by the so-called diesel-gate scandal, electric and plug-in hybrid cars (or SUVs) are selling well alongside petrol cars which are again partly replacing the diesel car market. Political powers (and society) tend to render design decisions as “black-and-white” or “yes-and-no” technology decisions, following the technology hype described by Gartner. However, a technology coexistence would be the best solution to minimise the overall environmental impact, selecting the best-suited propulsion technology based on the application, the specific use case, the availability of raw materials,Footnote 5 the available infrastructure, and other stakeholder interests.
In a similar fashion, \(\hbox {UAM}\) and full-electric flight are currently overhyped. Obviously, the emergence of \(\hbox {UAM}\) is backed by real technology evolution (such as batteries, solid-state electric devices, and communication devices). This is attracting disproportionate focus in academia and R&D investments, which is a positive side of the coin (extensive ongoing research on electrification) but also represents a disadvantage in terms of the financing of other research fields.
7.2 Technology uncertainties
The greatest uncertainty predicting the (short-range) performance of new full-electrical aircraft such as the presented design study of an FAR/CS-23 compatible aircraft comes in from of a lack of clarity regarding how to handle reserves in the case of a full-electric aircraft. For short-range aircraft, the required reserves (for the alternate airport and loiter time) are the dimensioning requirement, and the residue range would not be sufficient for commercial operation. Here, the aircraft community has started a discussion with the licensing authorities on how reserves should be handled in the case of a full-electric aircraft. Also, because of the low cruise altitude and flight velocity, operation and useable range are highly susceptible to wind and weather, and it is questionable whether this will be accepted by passengers (comfort!), crew (the risk of icing), and operators (high flight cancellation rates). Together with a sound estimation of future battery-technology advancements, drawing up a reasonable time-frame for technology adaption for aerospace applications will enable a precise study of the possibilities and operation of future full-electric air transportation.
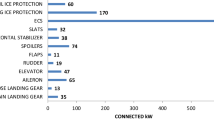
Another remaining uncertainty is the additional energy required for the on-board systems such as avionics, lighting, infotainment system, de-icing, flight control and high-lift system, and landing gear. Besides these, the highest power demand comes from the \(\mathrm{environmental control system}\hbox { (ECS)}\), or, including the batteries and the drivetrain, a global \(\hbox {TMS}\). The basic properties of such a centralised \(\hbox {TMS}\) system remain unclear, and are subject to research.
8 Conclusion
This paper shows that electric-powered civil air transportation over relevant distances would only become feasible with a significant increase in battery-specific energy and fundamental changes in operations.
While a direct comparison with jet aircraft is not possible, the main design impacts for electric aircraft are the sizing of the high, fixed mass, and the required battery volume. The only positive effect here is that the designer is free to place the batteries, because there is no weight change due to fuel burn, and consequently no change in the centre of gravity.
To design an aircraft for the best energy efficiency, it is not enough to focus on only optimising the overall propulsion system efficiency; energy efficiency is a result of the total vehicle weight and the aerodynamic efficiency (L/D) at cruise point. As expected, the design study revealed a high sensitivity between total mass and the battery weight-specific energy, while aerodynamic efficiency relates mainly to the volume-specific energy density. Therefore, minimising the required mission energy is necessary and the outcome of the design process is consequently a slow and low flying aircraft. This result can be validated with existing full-electric aircraft, where perhaps the most advanced optimisation from an energetic point of view is the fully electric motor glider Antares 20E which has been in series production since 2003 [27]: extreme high L/D, low velocities, and a low wing loading, offering enough space for the batteries in the wing.
This work should not be seen as a negation of the potential for electrification in civil air transportation, but rather as a call to keep expectations at a realistic level and to keep in mind our ultimate goal: to create safer, greener, and cheaper aircraft, in this order. Electrification can play a relevant role in different segments and systems, but it alone will not provide a paradigm shift towards the greener aviation goals in the short-to-medium term. The natural advantages of former technologies, as well as the natural drawbacks of new ones, should not be forgotten. Additionally, with the advent of hydrogen as the primary energy source, huge parts of the propulsion system and the on-board power systems may be electrified (e.g., using fuel cells), so that full-electric aircraft may pave the way forward to gain experience and raise the \(\hbox {TRL}\) and performance of power electric components, which may be useful knowledge from a long-term view for upcoming hydrogen, hybrid, or full-electric aircraft.
Notes
Depending on the recharge rate and the termination voltage, a standard 1.5 V Alkaline AA battery of 23 grams has an energy content of approximately 3 Wh (thus a gravimetric energy density of 130 Wh/kg).
Hydrogen storage mass per tank weight.
Parasite drag (\(D_{0}\)) consists mainly of form drag and friction drag and therefore scales with the aircraft size (wetted area) and the frontal area. It is therefore sensitive to aircraft volume and hence scales with the fuel volumetric energy density.
Excluding \(\text {high-altitude long range}\hbox { (HALE)}\) UAVs also denoted as pseudo-satellites powered by solar cells.
Environmentally friendly and CO2-neutral energy sources for ethanol production in Sweden, such as waste and forest industry residues, are limited.
References
Aircraft Electric Propulsion and Power Working Group—AIAA: Guidelines for Analysis of Hybrid Electric Aircraft System Studies (2019). Available: https://www.aiaa.org/docs/default-source/uploadedfiles/publications/standards/hybrid-electric_properties_attributes.pdf Accessed 27 january 2020
Banks, K.: Orkney islands could get first electric plane service. BBC News (2018). https://www.bbc.com/news/uk-scotland-north-east-orkney-shetland-45876604
Bock, L., Burkhardt, U.: Contrail cirrus radiative forcing for future air traffic. Atmos. Chem. Phys. 19(12), 8163–8174 (2019). https://doi.org/10.5194/acp-19-8163-2019
Borer, N.K., Patterson, M.D., Viken, J.K., Moore, M.D., Clarke, S., Redifer, M.E., Christie, R.J., Stoll, A.M., Dubois, A., Bevirt, J.B., Gibson, A.R., Foster, T.J., Osterkamp, P.G.: Design and performance of the NASA SCEPTOR distributed electric propulsion flight demonstrator. In: 16th AIAA Aviation Technology, Integration, and Operations Conference. AIAA, Washington (2016). 10.2514/6.2016-3920
Bugga, R., Krause, C., Billings, K., Ruiz, J.P., Brandon, E., Darcy, E., Iannello, C.: Performance of Commercial High Energy and High Power Li-Ion Cells in Jovian Missions Encountering High Radiation Environments. NASA Aerospace Battery Workshop (2019)
Dahlmann, K., Koch, A., Linke, F., Lührs, B., Grewe, V., Otten, T., Seider, D., Gollnick, V., Schumann, U.: Climate-compatible air transport system-climate impact mitigation potential for actual and future aircraft. Aerospace (2016). https://doi.org/10.3390/aerospace3040038
Darecki, M., et al.: Flightpath 2050 Europe’s Vision for Aviation. techreport, Report of the High Level Group on Aviation Research, European Commission (2012). https://doi.org/10.2777/15458
EASA: Certification Specifications for Normal, Utility, Aerobatic and Commuter Aeroplanes CS-23 Amendment 5 (2017). https://www.easa.europa.eu/certification-specifications/cs-23-normal-utility-aerobatic-and-commuter-aeroplanes Accessed 25 january (2020)
Edwards, R., Hass, H., Larivé, J.F., Lonza, L., Mass, H., Rickeard, D., Weindorf, W.: Well-to-Wheels analysis of future automotive fuels and powertrains in the European context, WELL-TO-TANK Report Version 4.a. Tech. rep., Joint Research Center of the EU (JRC), Luxembourg (2014). https://doi.org/10.2790/95629
European Alternative Fuels Observatory: Alternative Fuels Market—Road Transport (2020). Available: https://www.eafo.eu/vehicles-and-fleet/
European Council for Automotive RD: Battery requirements for future automotive applications (2019). Available: https://eucar.be/wp-content/uploads/2019/08/20190710-EG-BEV-FCEV-Battery-requirements-FINAL.pdf Accessed 22 june (2020)
European Environment Agency: Train or plane? transport and environment report 2020. Tech. Rep. 19, European Environment Agency, Luxembourg (2021)
Fenn, J., Blosch, M.: Understanding Gartner’s Hype Cycles. Tech. rep., Gartner (2018). https://www.gartner.com/en/documents/3887767 Accessed 20 january 2020
Ferrier, L.: Electric aircraft range calculator (2019). http://web.mit.edu/lochie/www/erange/main.html
FESTO: SupraMotor: Superconducting compact claw pole motor with electrical solid-state cooling. Tech. rep., FESTO AG & Co. KG (2018). https://www.festo.com/supra Accessed 17 july 2019
Goyal, R.: Urban air mobility (UAM) market study. Tech. rep., NASA Technical Report HQ-E-DAA-TN65181, Washington (2018). https://ntrs.nasa.gov/api/citations/20190001472/downloads/20190001472.pdf?attachment=true
Hall, D., Greitzer, E., Dowdle, A., Gonzalez, J., Hoburg, W., Lang, J., Sabnis, J., Spakovszky, Z., Yutko, B., Courtin, C., Thalheimer, W., Trollinger, L., Tylko, J., Varney, N., Uranga, A., Byahut, S., Kruger, M.: Feasibility of Electrified Propulsion for Ultra-Efficient Commercial Aircraft—Final Report (2019)
Heinemann, C., Kasten, P., et al.: Die Bedeutung strombasierter Stoffe für den Klimaschutz in Deutschland. techreport, Institude for Applied Ecology / Öko-Institute e.V. (2017). https://www.oeko.de/fileadmin/oekodoc/PtX-Hintergrundpapier.pdf Accessed 14 january 2020
Hemmerdinger, J.: All-electric Grand Caravan makes maiden flight. FlightGlobal (2020). https://www.flightglobal.com/airframers/all-electric-grand-caravan-makes-maiden-flight/138600.article
Hepperle, M.: Electric flight—potential and limitations. In: Energy Efficient Technologies and Concepts of Operation. Tech. Rep, NATO, NATO Science and Technology Organization, Lisbon (2012)
Hernandez Lugo, D., Clarke, S., Miller, T., Redifer, M., Foster, T.: X-57 Maxwell Battery: From cell level to system level design and testing. In: AIAA/IEEE Electric Aircraft Technologies Symposium (EATS). Cincinnati (2018). NASA Technical Presentation GRC-E-DAA-TN59043
Hileman, J.I., Katz, J.B., Mantilla, J.G., Fleming, G.: Payload fuel energy efficiency as a metric for aviation environmental performance. In: 26th Congress of International Council of the Aeronautical Sciences, pp. 3314–3324. Anchorage (2008)
Hoerner, S.F.: Fluid-dynamic drag: practical information on aerodynamic drag and hydrodynamic resistance. Hoerner Fluid Dynamics, Bakersfield (1965)
International Civil Aviation Organization (ICAO): Annex 6 to the Convention on International Civil Aviation: Operation of Aircraft—Part I—International Commercial Air Transport—Aeroplanes, 10 edn. ICAO, Montréal, Canada (2016)
Jenkinson, L.R., Simpkin, P., Rhodes, D.: Civil jet aircraft design, 1st edn. Arnold, London (1999)
Kaminski-Morrow, D.: Norwegian authorities aim for electric aircraft debut by 2030. FlightGlobal (2020). Available: https://www.flightglobal.com/air-transport/norwegian-authorities-aim-for-electric-aircraft-debut-by-2030/137146.article Accessed 25 june 2020
Lange Aviation: The antares 20e electric motorglider (2020). https://www.lange-aviation.com/en/produkte/antares-20e/ Accessed 31 january 2020
Lee, J.J., Lukachko, S.P., Waitz, I.A., Schafer, A.: Historical and future trends in aircraft performance, cost, and emissions. Annu. Rev. Energy Environ. 26(1), 167–200 (2001). https://doi.org/10.1146/annurev.energy.26.1.167
Lilium GmbH: Lilium reveals new air taxi as it celebrates maiden flight (2019). https://lilium.com/newsroom-detail/lilium-reveals-new-air-taxi-as-it-celebrates-maiden-flight Accessed 11 june 2020
Millikin, M.: Power-To-X: Sunfire reports successful test run of co-electrolysis system over 500 hours; e-crude demo targeted. Tech. rep., Green Car Congress, LCC (2019). https://www.greencarcongress.com/2019/01/20190116-sunfire.html Accessed 17 january 2020
Misra, A.: Energy storage for electrified aircraft: the need for better batteries, fuel cells, and supercapacitors. IEEE Electrification Magazine 6(3), 54–61 (2018). https://doi.org/10.1109/MELE.2018.2849922
NASA Armstrong: Fact sheet: NASA X-57 Maxwell (2018). https://www.nasa.gov/centers/armstrong/news/FactSheets/FS-109.html Accessed 16 january 2020
National Transportation Safety Board: Incident Report: Auxiliary Power Unit Battery Fire Japan Airlines Boeing 787- 8, JA829 Boston, Massachusetts January 7, 2013 (2014)
Naturvårdsverket: Sweden’s seventh national communication on climate change. Tech. rep., Government Offices of Sweden, Ministry of the Environment and Energy (Natrurvårdsverket) (2017). ISSN 0282-7298
Nordic Network for Electric Aviation, Swedavia: Electric aviation has arrived and will be here to stay. International Airport Review (2020). https://www.internationalairportreview.com/article/114071/electric-aviation-arrived-here-to-stay/ Accessed 22 june 2020
Raymer, D.P.: Aircraft design: a conceptual approach, 2nd edn. AIAA Education Series, Washington (1992)
Schaal, S.: Mercedes EQC: Die Batterie im Detail (2018). https://edison.media/erklaeren/mercedes-eqc-die-batterie-im-detail/23004130.html Accessed 16 january 2020
Sforza, P.M.: Estimating zero-lift drag coefficients and maximum L/D in subsonic flight. In: 2018 AIAA Aerospace Sciences Meeting. American Institute of Aeronautics and Astronautics, Kissimmee (2018). https://doi.org/10.2514/6.2018-0273
Straubinger, A., Michelmann, J., Biehle, T.: Business model options for passenger urban air mobility. CEAS Aeronautical Journal (2021). https://doi.org/10.1007/s13272-021-00514-w
Torenbeek, E.: Synthesis of subsonic airplane design. Delft University Press, Rotterdam (1976)
Toyota Motor Corporation: Outline of the Mirai. Online (2015). https://www.toyota-europe.com/download/cms/euen/Toyota%20Mirai%20FCV_Posters_LR_tcm-11-564265.pdf
Uber Elevate: Fast-Forwarding to a Future of On-Demand Urban Air Transportation. Tech. rep., Uber Technologies Inc. (2016). https://www.uber.com/elevate.pdf Accessed 15 January 2020
United Nations: The UN sustainable development goals (2020). Available: https://www.un.org/sustainabledevelopment/ Accessed 31 January 2020
United States Department of Transportation—Bureau of Transportation Statistics: Air Carrier Summary Data (Form 41 and 298C Summary Data) (2017). https://www.transtats.bts.gov/Tables.asp?DB_ID=130 Acessed 17 September 2019
Wright Electric: Wright Electric Begins Engine Development Program for 186 Seat Electric Aircraft (2020). https://weflywright.com/media/ Accessed 11 june 2020
Yugo, M., Soler, A.: A look into the role of e-fuels in the transport system in europe (2030–2050). Tech. Rep. 1, Concawe: Environmental Science for Eurropean Refining (2019). https://www.concawe.eu/wp-content/uploads/E-fuels-article.pdf Accessed 20 June 2020
Funding
Open access funding provided by Linköping University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Staack, I., Sobron, A. & Krus, P. The potential of full-electric aircraft for civil transportation: from the Breguet range equation to operational aspects. CEAS Aeronaut J 12, 803–819 (2021). https://doi.org/10.1007/s13272-021-00530-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-021-00530-w