
Abstract
The problem of boreholes deflection in coal mines is common, especially in soft and hard composite coal seams. As a result, the distribution of boreholes is uneven and forms a blank zone in the drainage area, which fails to achieve the regional pre-draining, causing gas explosion or coal and gas outburst accidents. Aiming at the above problems, this paper developed the technology of anti-inclination for drilling based on the causes of borehole deflection in detail. The anti-inclination advice integrates straight keeping, slag removal and smooth back drilling with reasonable technical parameters. Full hole drilling was adopted to realize straight drilling. Three spiral grooving, vertical grooving and three-edge short-circuit were adopted for collaborative slag removal. Three alloy pieces were welded at the rear end of anti-inclination device to act as reverse drill bit, realizing smooth drilling withdrawal. For sticking problems, we improved the anti-inclination device. Three 20 mm millimeters wide vertical grooves were milled in each 120° direction around the device. After using the improved anti-inclination device, the average deviation of dip and azimuth was only 4.8 and 4.5 degrees, respectively, which were reduced by 51 and 44%. The borehole offset was reduced from 9.9 m to 2.9 m, a decrease of 71%, which improved the gas drainage effect and ensured the safe production of the mine.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In China, the geological conditions of coal seams are relatively complex, and coal mine accidents are easy to occur, especially gas disasters, which severely restrict the safe and efficient mining of coal. The increase in production has led to the expansion of coal mining to greater depths. Consequently, low gas mines were transformed into high gas mines, and high gas mines were transformed into coal and gas outburst mines (Wang et al. 2015a, b; Kong et al. 2014). After decades of research and practice, gas drainage is a effective method for comprehensive gas management in high gas, coal and gas outburst mines. It can reduce coal gas content, gas pressure, and fundamentally eliminate gas disasters (China National Coal Mine Safety Supervision Bureau, 2019). Many scholars at home and abroad have studied how to improve the effect of gas drainage from the aspects of drilling construction, permeability improvement and hole sealing (Wang et al., 2022; Ibrahim and Saleh 2019; Wang and Xu 2019; Saleh 2018, 2020; Lu et al. 2014; Sun et al. 2022).
Gas drainage drilling is the fundamental guarantee for gas drainage effect. However, in the process of drilling construction, due to the influence of various factors such as lithological changes, drilling tool structure, weight of the drill rod, drilling process, construction technology and other factors, the actual trajectory of the drill hole deviates greatly from the design trajectory. (Dukas and Morkel 1983; Zhou et al. 2012; Gu and Luo 2011). The deviation easily causes gas drainage blind zones, which will inevitably affect gas drainage and cannot achieve the purpose of achieving drainage standards, as shown in Fig. 1. Therefore, the deflection of the borehole is one of the biggest problems affecting the gas drainage effect.

Gas drainage blind zones caused by borehole deflection
Aiming at the deviation of the borehole during the drilling process, as early as the 1950s, Lubinski and Woods first studied the bending problem of drill collars under the action of WOB and proposed adding a stabilizer at the proper position of drill collars to prevent deviation (Lubinski and Woods 1953). Since the late 1980s, several countries have developed closed-loop guidance systems such as VDS, SDD, VertiTrak, and PowerV with anti-deflection capabilities, which effectively solved the problem of borehole quality when drilling in some relatively complicated geological conditions (Ligrone et al. 1996; Calderoni et al. 1999; Barnes et al. 2001).
In 1990, Eddison and others proposed the use of adjustable drill rod stabilizers to improve the quality of directional drilling based on a large number of field investigations. The stabilizer was also beneficial to reduce torque and hole wall resistance and effectively improve drilling quality (Eddison and Symons 1990). Subsequently, Faye et al. (1995) proposed a reducing stabilizer, which can overcome the inaccuracy of numerical simulation and realize real-time remote control adjustment. Ruszka et al. (1999) adopted the rotary closed-loop drilling system to effectively control the drilling direction, improve the drilling quality, and save 55% of construction time. In 2001, a new theoretical model of the contact between drill pipe and hole wall was established. Through theoretical analysis and field test, it was found that the model can well estimate and predict the contact force and corresponding deformation of drill pipe, which provided a basis for controlling the drilling direction of drill pipe (Polak and Lasheen 2001; Cheng and Polak 2007). In 2005, Lueke and others analyzed the influence of geological conditions, drill pipe pressure, bit structure, drilling diameter and drilling depth and other factors on drilling deviation in the process of drilling and then pointed out that anti-deviation device can control the deviation degree of drilling effectively (Lueke 2005; Lueke and Ariaratnam 2005). In 2014, a kind of horizontal directional drilling bit ground-penetrating radar equipment was designed, which can provide real-time bit position information and provide reference for controlling drilling direction (Manacorda et al. 2014). Matheus and others analyzed the shortcomings of existing drilling track control and pointed out that the new rotary steering system (RSS), to control and predict the drill pipe (Matheus et al. 2014; Figueredo 2015). MEMS-based inclinometers were used to measure ground movement, and a wireless transmission method was proposed for efficient data collection (Ha et al. 2018). In order to assess the hole deviation, a Pulsar Micro Probe Mk3 had been used to measure the actual end position of five production blastholes. The comparison between MWD parameters and deviation measurements pointed out that drilling deviations were highly influenced by the rock structure (Navarro et al. 2019). After Australia’s VLD drill rig was introduced into China, it has achieved good results. During the directional drilling process, the real-time measuring information is transmitted from the downhole to the uphole. Then, the driller rotates the drilling string to control the inclination and azimuth of hole (Shi et al. 2011).
At present, the above research results and equipment are mostly used in the field of tunnel engineering, surface drilling, or large coal mine because of its huge size or high price. China has many small coal mines. By the end of 2018, there were 3113 small coal mines with a capacity of less than 0.3Mt in China. The personnel and equipment allocation of these small coal mines was weak. The drilling rigs are all non-directional drilling rigs. In the process of construction, the drilling holes deviate and fail to reach the designated area. However, the structure of passive deviation correction device is relatively simple, which has the problems of poor slag discharge and difficult withdrawal of drilling, especially in soft and hard composite coal seams. It is difficult to be popularized and applied. Coal mine gas drainage drilling lacks a passive accurate orientation device with low cost, high precision and easy operation, which is suitable for most small coal mines. This paper carries out research for this purpose. Based on the theoretical analysis of borehole deflection, the technology of anti-inclination has been developed, which integrates straight keeping, slag removal and smooth back drilling. Full hole drilling is adopted to realize straight drilling. Three spiral grooving, vertical grooving and three edge short connection are adopted for collaborative slag removal. Three alloy pieces are welded at the rear end of anti-inclination device to act as reverse drill bit, realizing smooth drilling. The equipment has simple structure and low price and still meets the needs of gas drainage.
Deviation test of gas drainage borehole
Overview of test site
The test site is 16031 working face of Guhanshan coal mine in Henan province of China. Working face 16,031 is located in the east wing of mining area 16, as shown in Fig. 1. The strike length is 656 m, the inclined length is 159 m, and the average coal thickness is 5.5 m with dip angle of 15 degrees. The coal seam is mainly hard coal, and there is a layer of soft coal at the lower part, with a thickness of 0.5 ~ 1 m. The firmness coefficient is 0.3 ~ 1.2. The coal seam histogram is also shown in Fig. 2.

Working face position and histogram
Inclinometer method and inclinometer
Inclinometer method
At present, there are five calculation methods for the trajectory coordinates of the drilling trajectory, namely average angle full distance method (also called average angle method), balance tangent method, curvature radius method, corrected average angle method, and minimum curvature method (Sun 2010; He 2013). The average angle and full distance method has a relatively simple calculation process, which meets the requirements of coal mine site accuracy and is widely used in coal mines, as shown in Fig. 3.

Calculation of drilling trajectory map by mean angle and full distance method
In the method of equal angle and full distance, the drilling track between two adjacent measuring points is regarded as a straight line, while the whole drilling track can be regarded as a broken line composed of many straight lines (Wang et al. 2015a, b). In calculation, the inclination and azimuth of each straight line are taken as the average of the inclination and azimuth of the two adjacent measuring points. In the field measurement, a reference point should be selected first, which is generally the coordinate value at the opening, and then, a sampling measurement should be carried out at a certain distance. Each sampling can get three basic parameters of the measuring point: hole depth, dip angle and azimuth angle. According to the three basic data measured, plus the test data at the reference point, the coordinate increment of the second point can be calculated, then the three-dimensional coordinate of the second measuring point can be calculated, and so on, and then, the three-dimensional coordinate value of each measuring point in the future can be obtained. Using the 3D coordinate value of the whole hole section, the 3D trajectory map of drilling is drawn. See (1)–(3) for details:
where Xn, Yn, Zn are 3D coordinates of the nth measurement point; \(\vartriangle L\) is hole length of two adjacent measuring points; α, β represent the inclination and azimuth of each measurement point of the borehole.
Inclinometer
Operating principle: The borehole inclinometer is mainly composed of inclinometer tube and synchronous machine as shown in Fig. 4. The probe tube collects data through the sensor in the borehole and stores in its own memory, and the synchronous machine records the sampling point number. After the test, the data in the probe pipe were communicated to the synchronizer, and then, the synchronizer transmitted the data to the computer, and the data were processed by the inclinometer processing software to draw the corresponding drilling track diagram.

YZG6. 4 drilling track measuring instrument
Work steps: (1) Connection. The rear plug behind the probe tube was unscrewed, the probe tube with the data line was connected the synchronizer, the two switches were turned on at the same time until “please choose” is displayed on the screen of the synchronizer. (2) Synchronization. Press the "sync" key on the synchronizer button to start the synchronization. (3) Measure.Connect the probe pipe to the drill pipe and send it into the drilling hole to start the test. According to the test requirements, press the "sampling" button on the synchronizer every 3 m, and record the corresponding depth of the drilling hole at this time, and repeat this operation until the end of the test. After the test, press the "off" button of the synchronizer. (4) Data communication. After the test, the drill pipe was pulled out, unscrew the adapter and the rear plug of the probe pipe was unscrewed. The probe pipe was turned off, Connect the synchronizer with the probe pipe again with the communication cable to synchronize the data.
Analysis of borehole deflection
One measuring point was arranged every 3 m. The inclination and azimuth of each measuring point were measured according to the inclinometer, and the three-dimensional coordinate value of each measuring point was obtained by using the average angle and full distance method, as shown in Table 1. 3D trajectory maps of part of the holes were made, as shown in Fig. 5.

The three-dimensional trajectory of drill
The results showed that the inclination and azimuth of the borehole deviated by an average of 9.8 and 8.1 degrees, respectively. In order to better understand the change of the dip angle in different distance intervals throughout the drilling process, the dip angle at the orifice was the basic value, and a certain distance was selected to inspect the inclination change of the entire borehole, as shown in Eq. (4), and the specific calculation results are shown in Table 2. (Positive values represent upward deflection, and negative values represent downward deflection.)
where K is change rate of inclination, %; θ is average drilling inclination in the selected interval, °; α is angle of inclination at orifice, °.
As can be seen from Table 2, compared with the inclination at the opening, the inclination change of the holes is large. The change rate of hole 384 is the largest within 80–100 m, reaching 175%. The average change rates were calculated at different distance intervals. It can be seen that the borehole was the most serious deviation in the range of 40–60 m. The actual trajectory of holes had a large deviation when it reaches the final. The maximum overall offset was 24.2 m. The minimum overall offset of borehole 576 was 5.2 m at the final, and the average overall offset is 9.9 m. Through testing and analysis, it was found that the deviation of the boreholes in the bedding layer was very serious. The drilling was not constructed to the design position, and there was a blank zone, threatening safe and efficient production.
Cause of borehole deflection
The detailed rules for the prevention and control of coal and gas outburst stipulate that when the depth of pre-gas drainage boreholes exceeds 120 m, the trajectory of at least 2 boreholes shall be measured every 10 boreholes, and the trajectory of at least 1 borehole shall be measured every 10 boreholes with a depth of 60–120 m. The construction quality of borehole is judged by the trajectory of borehole to ensure the effect of gas drainage (China National Coal Mine Safety Supervision Bureau, 2019).
Many factors are likely to cause borehole deflection, of which the three most important factors are geological factor, technical factor and technological factor.
The geological factor is the heterogeneity of the rock stratum. When drilling in the rock, the heterogeneity of the rock stratum will make the bit bear unbalanced stress at the bottom of the hole, which is easy to cause the deviation of the hole, especially in areas where bedding, schistosity and soft hard interbedding are relatively developed. When the bit passes through the soft hard interbedding, the stress on both sides of the bit will be uneven, resulting in deviation of the hole, as shown in Fig. 6.

Diagram of drilling hole between soft stratum and hard stratum
Technical factors are divided into two categories, namely the initial deviation factor and the factors that affect the deviation of drilling.
The initial deflection factors mainly refer to the uneven foundation of the drilling rig, the incorrect installation of the vertical shaft, or the misalignment between the drill pipe and the drilling center, and the concentricity of the screw connection, etc.
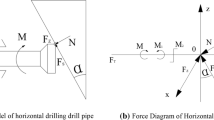
In the process of drilling, the deflection factors mainly refer to the structural characteristics of the drill pipe, the size and structure of the drill pipe. The rigidity of drilling tool has a great influence on the deviation of drilling hole. The shaft of the bent drill pipe group under the action of longitudinal pressure and dumping moment can be expressed by formula (5) (Gao 2005):
where P is axial load, N; Ma is dumping moment, N m; l is long longitudinal bending radius of drill pipe, m; \(x\) is flow coordinates, m; \(k = \sqrt {p/EI}\); E is modulus of elasticity of drill pipe, N/m; I is moment of inertia of drill pipe, \(N \, m\).
It can be known from formula (5) that the value of the dumping moment has a great influence on the bending and deflection angle of the hole bottom drilling tool group, which will further cause the bending strength to increase. The bending strength will increase. As the connected drill pipe becomes longer and the drilling depth continues to deepen, the rigidity of the drill pipe will continue to decrease, so that it will become a flexible body. As a result, the drill pipe is deformed and bent, which causes the drilling to deflect.
Secondly, the size and structure of the drill pipe. In order to ensure that the cuttings can be removed smoothly, the current drilling methods are that the drill bit diameter is often larger than the drill pipe diameter, and in the construction process, the drill bit will lead to a certain degree of wall expansion, so there is a gap between the drill pipe and the hole wall, resulting in borehole deflection. In the process of drilling, the axial pressure applied to the bit will cause the drill string to bend and deform. Due to the bending and deformation of the drill pipe, the axial pressure will generate horizontal component along the bent drill pipe. Because of the existence of hole wall clearance, the space for the drill pipe to bend is provided.
The influence of technological factors is related to the drilling method. At present, the drilling technology is usually rotary drilling, and the influence degree of technological factors often depends on the relationship between bending strength and drilling parameters. The biggest influence on the bending of the drilling hole is the axial pressure. In the construction process, in order to ensure a high mechanical drilling speed, it is inevitable to have enough bit pressure, and excessive bit pressure will cause the drill pipe group at the bottom of the hole to deviate relative to the central axis of the drilling hole, increase the build-up force, and promote the drilling hole to deviate.
On the one hand, the increase of the rotary speed will increase the centrifugal force on the drill pipe and then reduce the half wave length of the longitudinal bending and increase the deflection of the drill pipe group at the bottom of the hole, making the drilling more prone to deflection; on the other hand, the increase of the rotary speed will reduce the drilling time, thus reducing the effect time of the drilling deflection, which reduces the deviation of the borehole. It can be seen that the rotation speed has a dual effect on the borehole deflection.
Technology and device for straightening and incline prevention of drilling
Key techniques of anti-inclination
Straightening technology
There is a gap between the drill pipe and the hole wall, which will provide space for the deviation of the drill pipe. Therefore, in order to achieve straight-line drilling, this article will take the method of full-hole drilling, that is, add a drill pipe with straight keeping function with the same diameter as the drill bit between the normal drill pipe and the drill bit.
-
(1)
Change the stress at the bit.
As shown in Fig. 7, due to the disappearance of the hole wall clearance, the total number of supported points near the drill bit increases. Therefore, the center of gravity will also move backward from point A to point B. The original force acting on the drill bit is mainly acted on the anti-inclination device, the force at the drill bit can be changed, so that the drill bit can keep drilling straight.
-
(2)
Increase the contact area

Change of center of gravity of bit
In the process of drilling, revolution is generated, and hole expansion is easy to occur. After the installation of anti-inclination device, it can inhibit the swing of the bit. Even if the hole expansion occurs, the anti-inclination device is connected close to the bit, the interaction between the device and the borehole wall can be used to straighten the drilling direction of the bit, realizing straight drilling.
Deslagging technology
At present, there are three types of drill rods commonly used in coal mines: smooth drill rods, triangular drill rods and grooved drill rods. Each drill pipe type has a different slagging operation principle:
-
(1)
Smooth drill pipe.
The slag discharge method is mainly fluid slag discharge, that is, wind slag discharge and hydraulic slag discharge, as shown in Fig. 8.

Schematic diagram of fluid slag removal
-
(2)
Triangular drill pipe.
Triangular drill rod can play a certain role in stirring the cuttings in the hole, as shown in Fig. 9. When drilling with a triangular-shaped drill rod, due to the stirring effect, the drill cuttings accumulated on the lower side of the hole wall will be stirred away, so that it will be more easily discharged into the hole under the action of wind or hydraulic slag discharge and will not block the hole wall gap.

Stirring effect of triangular drill rod
-
(3)
Grooved drill pipe.
This kind of drill pipe slag removal method is mainly fluid slag removal, supplemented by mechanical slag removal (Fig. 10). Moreover, the cuttings in the spiral groove on the surface of the drill pipe are in a flowing state, which can take away the heat generated on the surface in time.

Schematic diagram of mechanical slag discharge of grooved drill pipe
Through the analysis of the different slag discharge principles of the three types of drill pipes, when the full-hole drilling method is adopted to achieve straight-line drilling, first, if the diameter of the smooth drill pipe is the same as the diameter of the drill hole, the drill hole will be completely blocked. Fluid slag discharge cannot be achieved. Secondly, if a triangular drill pipe is used, the contact surface between the drill and the hole wall is too small to achieve a good straightening effect. Therefore, in this paper, grooved drill pipe is selected as the type of straight and anti-inclined drilling tool, which has sufficient contact area with the hole wall and has dual slag discharge methods of fluid and mechanical slag discharge.
Withdrawal drilling
The full-hole drilling is used, it may be difficult to withdraw the drilling tool during the withdrawal process, especially in the case of the hole section with more hole collapse slag body. Therefore, on the one hand, the researchers connected a three edge short circuit at the back of the device and stirred the rear slag body during withdrawal to prevent accumulation; on the other hand, a reverse drill bit was welded at the rear of the device to realize reverse retreat and smooth retreat.
Based on the above-mentioned technical research results, a straightening and anti-incline device is developed.
Structural design of anti-inclination device
The overall structure of the device is shown in Fig. 11. The groove is adopted to make the device has both the dual methods of fluid and mechanical slag discharge. Three alloy pieces are welded at the back of the device to play the role of reverse drill, especially when retreating, because the diameter of the device is larger than the diameter of the drill rod. It can play a certain role in cutting the hole wall when the back drilling is not smooth. A triangular short circuit is connected to the back of the device. When drilling or withdrawing, the triangular short circuit is used to stir the slag to prevent the slag from accumulating in the hole.

Structure diagram of anti-inclination device
Technical parameters
Diameter and length
At present, the diameters of drilling bits for gas drainage in coal mines are mostly 75, 89, 94, and 113 mm, of which 94 mm diameter bits are widely used, and 94 mm diameter bits are also selected for construction drilling in Guhanshan Coal Mine. Therefore, the diameter of the device is determined to be 94 mm.
In order to facilitate transportation and installation, the weight of the device must be as light as possible. Due to full hole drilling, the diameter of the anti-deviation device is relatively large. The longer the size, the heavier the weight of the device. Combined with the factors of slag removal and portability, we designed the length as 800 mm. Its weight is about 30 kg.
Parameter design of spiral groove
Through a large number of field tests, the anti-skew device is finally designed into a three spiral groove structure to improve the frequency of coal slag mixing. Considering the diameter of drill cuttings and the difficulty of drill pipe processing, the width of spiral groove is designed as 20 mm and the depth is 12 mm. As well as convenient and effective transportation of drilling cuttings, the lead of spiral groove should be increased as much as possible. Considering the influence of processing difficulty, the design lead is 192 mm.
Helix angle
On a cylindrical surface, the acute angle between the tangent of the cylindrical helix and the straight generatrix of the cylindrical surface passing through the tangent point is called the helix angle. Its calculation formula is shown in Eq. (6):
where α is helix angle, °; S is pitch, mm; d is drill pipe diameter, mm.
The diameter of the device is 94 mm, and the pitch is 64 mm.
Therefore, the helix angle α = 12.8 °.
In summary, the technical parameters of the device are shown in Table 3.
Material selection for anti-inclination device
When drilling, the drill pipe needs to bear a larger load. Therefore, the drill pipe joints need for better performance materials. After investigation, combined with the functional characteristics and strength requirements of drill pipes and drill bits, 42CrMo steel pipe was selected as the drill pipe joint, and 27SiMn steel pipe was used as the drill pipe body.
According to the above design, the device is manufactured, as shown in Fig. 12.

Physical picture of anti-inclination device
Field test investigation and device improvement
Field test
Test drilling design parameters
The test site was still located at the Guhanshan Mine 16,031 working face. The drill diameter was 94 mm, and the drill rod type was a triangular-shaped drill rod. The drill rod diameter was 73 mm, and the specific design parameters of the drilling boreholes are shown in Table 4.
Test process
After drilling No. 596 for 2 m, the drill rod was withdrawn, the drill bit was removed, and the anti-inclination device was installed between the drill bit and the drill rod, and then, drilling started again. When to 28 m, there was no slag return in the hole. The drill pipe could not rotate due to serious sticking, the drill pipe had to be withdrawn. According to the field observation, compared with the normal drilling process, after the installation of anti-inclination device, drilling speed is relatively slow, and the drilling pressure is 1–2 MPa larger than usual. For the other two boreholes, after installing the anti-inclination device, the drill bit was stuck and failed after only 6 m of construction.
Inclination results
For the sake of comparison, the same measuring method was adopted. The test results are shown in Table 5.
According to Table 5, the maximum change of the inclination angle of No. 596 within 28 m is 2.3°; the maximum change of the azimuth angle was 2.6°; compared with the theoretical trajectory, the actual trajectory distance was 0.5 m around 28 m. By statistical analysis of the deflection situation within 20 m of 10 boreholes without using the anti-inclination device, the maximum average change in inclination and azimuth was 5.4° and 5.5°, respectively. The average change in offset distance near 28 m was 1.5 m. It can be calculated that the change in the inclination angle was reduced by 57.4%, the change in the azimuth angle was reduced by 52.7%, and the offset distance was reduced by 66.7%. It can be seen that the anti-inclination device had played a significant role in keeping straight and drilling.
Problems
Although the anti-inclination device achieved obvious effect, the drilling distance was only 28 m because of the smooth slag discharge, which was far from the designed hole depth. The device must be improved to achieve smooth drilling while maintaining straightness.
Improvement of anti-inclination device
According to field observations, the fundamental reason for the short drilling distance was that the slag discharge channel of the spiral groove was long, which caused the cuttings not to be removed in time, resulting in a stuck. The drilling speed is slightly accelerated, resulting in more coal cuttings and more serious sticking.
For sticking problems, we improved the anti-inclination device, that is, shorten the slag discharge channel to discharge the drilling cuttings as soon as possible and prevent accumulation in the spiral groove. Three 20 mm millimeters wide vertical grooves were milled in each 120° direction around the device. The final object is shown in Fig. 13.

Physical picture of improved grooved drill pipe
Further field test
A total of three drill holes were tested, and the drilling depth gradually deepened. The specific design parameters of the three drill holes are shown in Table 6.
Construction
The drilling process adopted the method of air slag discharge. The construction process of first borehole was relatively smooth, there were no stuck drills and no slag return in the hole. When to the design depth of 90 m, the drill rod was withdrawn. The withdrawal process is relatively slow, but basically smooth.
Subsequently, two more holes were tested. In the test process, the drilling depth was successfully reached to the design depth, which had been greatly improved compared to before the improvement.
Inclination results and analysis
The test results are shown in Tables 7, 8 and Fig. 14.

The three-dimensional trajectory of drill
The average deviation of dip and azimuth is only 4.8 and 4.5 degrees, respectively, which are reduced by 51 and 44%. Through the calculation of the deviation of the dip angle in every 20 m interval (Table 9), it can be found that the deviation of the dip angle in every 20 m interval decreases after the installation of anti-inclination device, especially in the 20–40 m interval, the improvement was obvious, and the upward deviation trend of the borehole was restrained, and the hole forming quality was improved.
The average overall offset of the drilled hole at the final was 2.9 m, which was 71% lower than before use. The reduction of the offset distance can help reduce the blank space of gas drainage, improve the gas drainage effect, and ensure the safe production.
Conclusion
Through the combination of theoretical analysis and field test, this paper designed and manufactured the anti-inclination device, which has been successfully applied in the coal mine. The following conclusions have been obtained:
-
(1)
The inclination of ordinary boreholes was measured, and the results showed that the dip angle and azimuth of the borehole deviated by an average of 9.8 and 8.1 degrees, respectively. At the final of borehole, the overall average deviation of the borehole was 9.9 m.
-
(2)
Based on the theoretical analysis of borehole deflection, the technology of anti-inclination has been developed, which integrates straight keeping, slag removal and smooth back drilling. The reasonable technical parameters of the device are obtained. The length of the device is 800 mm. The width, depth and lead of the spiral groove of the grooved drill pipe are 20 mm, 12 mm and 192 mm, respectively, and the spiral angle is 12.8°.
-
(3)
For sticking problems, we improved the anti-inclination device. Three 20 mm millimeters wide vertical grooves were milled in each 120° direction around the device. After using the improved anti-inclination device, the average deviation of dip and azimuth was only 4.8 and 4.5 degrees, respectively, which were reduced by 51% and 44%. The borehole offset was reduced from 9.9 m to 2.9 m, a decrease of 71%. The improvement is the most obvious, and the hole forming quality is improved.
References
Barnes M, Vargas C, Rueda F, Garoby J, Pacione M, Huppertz A (2001) Combination of straight hole drilling device, team philosophy and novel commercial arrangement improves drilling performance in tectonically active region. SPE/IADC 67695:1–10
Calderoni A, Savini A, Treviranus J (1999) Outstanding economic advantages based on new straight hole drilling device proven in various oilfield locations. SPE 56444:67–79
Cheng E, Polak M (2007) Theoretical model for calculating pulling loads for pipes in horizontal directional drilling. Tunn Undergr Sp Tech 22(5):633–643
China National Coal Mine Safety Supervision Bureau (2019) Detailed rules for preventing and controlling coal and gas. China Coal Industry Press, Beijing, China
Dukas B, Morkel H (1983) Surface and underground drilling techniques used in exploration drilling. J S Afr I Min Metall 83:164–169
Eddison A, Symons J (1990) Downhole adjustable gauge stabilizer improves drilling efficiency in directional wells. SPE 20454:509–516
Faye J, Chaffaut B, Wessel BJ, R, (1995) Varistab proves efficient in extended-reach rotary drilling. World Oil 216(10):32–40
Figueredo C (2015) Enhanced RSS technology pushes drilling envelope. J Petrol Technol 66(3):32–35
Gao K (2005) Research on directional drilling technique of gas drainage in low gas permeability coal seam. Master of Thesis. Liaoning University of Engineering and Technology, Fuxin, Liaoning, China.
Gu L, Luo X (2011) The progress and the problems of the gas extraction in China. Energy Technol Manage 1:105–107 (in Chinese)
Ha D, Kim J, Kim Y, Park H (2018) Development and application of a wireless MEMS-based borehole inclinometer for automated measurement of ground movement. Automat Constr 87:49–59
He J (2013) Analysis of oblique mechanism and trajectory prediction of deep-bore and small-bore scientific drilling holes. Doctor of Thesis. Chengdu University of Technology, Chengdu, Sichuan, China.
Ibrahim M, Saleh T (2019) Advances in functionalized nanoparticles based drilling inhibitors for oil production. Energy Rep 5:1293–1304
Kong S, Chen Y, Ren T, Liu H (2014) A sequential approach to control gas for the extraction of multi-gassy coal seams from traditional gas well drainage to mining-induced stress relief. Appl Energ 131:67–78
Ligrone A, Oppelt J, Calderoni A, Treviranus J (1996) The fastest way to the bottom: straight hole drilling drilling device drilling concept, design considerations, and field experience. SPE 36826:115–126
Lu S, Cheng Y, Ma J, Zhang Y (2014) Application of in-seam directional drilling technology for gas drainage with benefits to gas outburst control and greenhouse gas reductions in daning coal mine, china. Nat Hazards 73(3):1419–1437.
Lubinski A, Woods HB (1953) Factors affecting the angle of Inclination and Dog-Legging in Rotary Bore Holes. American Petroleum Institute.
Lueke J (2005) Surface heave associated with horizontal directional drilling construction techniques. Diss Abstr Int 66(10):55–61
Lueke J, Ariaratnam S (2005) Surface heave mechanisms in horizontal directional drilling. J Constr Eng M 131(5):540–547
Manacorda F, Miniati M, Simi A, Guidi R, Lelli S, Vacca D, Dei D, Mecatti D, Scott H, Morey M (2014) A bore-head GPR for horizontal directional drilling (HDD) equipment, Brussels. In:Proceedings of the 15th International Conference on Ground Penetrating Radar, pp 745–750.
Matheus J, Ignova M, Hornblower P (2014) A hybrid approach to closed-loop directional drilling control using rotary steerable systems. IFAC Proc Volumes 45(8):84–89
Navarro J, Segarra P, Sanchidrián J, Castedo R, López L (2019) Assessment of drilling deviations in underground operations. Tunn Undergr Sp Tech 83:254–261
Polak M, Lasheen A (2001) Mechanical modelling for pipes in horizontal directional drilling. Tunn Undergr Sp Tech 16(16):47–55
Ruszka J, Vos A., Otter B, Osmera B (1999) The true value of automated rotary directional drilling technology is demonstrated on a well offshore brune. SPE/IADC Drilling Conference.
Saleh T (2018) Nanotechnology in oil and gas industries, 1st edn. Springer, Cham, Switzerland
Saleh T (2020) Nanomaterials: classification, properties, and environmental toxicities. Environ Technol Innov 20:101067
Shi Z, Dong S, Yao N, Tian D (2011) The Underground directional drilling technology and equipments for kilometer deep borehole with MWD in Coalmine. Proc Earth and Plane Sci 3:17–22
Sun R (2010) Description and calculation method of near-horizontal directional drilling track in coal mine. China Coalbed Methane 07(4):36–39 ((in Chinese))
Sun Z, Huang B, Li Y, Lin H, Shi S, Yu W (2022) Nanoconfined methane flow behavior through realistic organic shale matrix under displacement pressure: a molecular simulation investigation. J Petrol Explor Prod Technol 12:1193–1201
Wang L, Xu Y (2019) Study of the law of gradual change of the influence of hydraulic punching under a rational coal output. Arab J Geosci 12:427
Wang H, Du Z, Fan Q, Shuang H, Xie J, You L (2015a) Inclination measuring and deviation correction technology of pressure released gas drainage borehole in external dislocated high level gateway. Coal Sci Technol 43(8):77–81
Wang L, Wang Z, Xu S, Zhou W, Wu J (2015b) A field investigation of the deformation of protected coal and its application for CBM extraction in the Qinglong coalmine in China. J Nat Gas Sci Eng 27:367–373
Wang Z, Sun Y, Li Z, Wang Y, You Z (2022) Multiphysics responses of coal seam gas extraction with borehole sealed by active support sealing method and its applications. J Natural Gas Sci Eng 100:104466
Zhou Y, Luo X, Wu L, Xie J (2012) Research situation of the permeation improvement and pressure release of coal seam with low permeability and the new technologies. J Natural Gas Sci Eng 32:23–25 (in Chinese)
Funding
The authors are grateful for the financial support from the National Science Foundation of China (No. 51874122, No. 52174172 and No. 52074107), Program for Innovative Research Team of Henan Polytechnic University and Key Scientific Research Projects Plan of Henan Higher Education Institutions (No. 19A440008).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The author hereby confirms no conflict of interest in this publication regarding any financial or personal relationship with a third party whose interests could be positively or negatively influenced by the article’s content.
Ethical statement
The author hereby confirms abiding with all ethics including copy rights, trademarks, commercial statements, etc.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xu, Y., Wang, L., Chen, X. et al. Improvement of drilling quality using precision directional drilling technology. J Petrol Explor Prod Technol 12, 3149–3164 (2022). https://doi.org/10.1007/s13202-022-01510-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13202-022-01510-4