
Abstract
Estimation of evapotranspiration (ET) is an essential component of the hydrologic cycle, which is also requisite for efficient irrigation water management planning and hydro-meteorological studies at both the basin and catchment scales. There are about twenty well-established methods available for ET estimation which depends upon various meteorological parameters and assumptions. Most of these methods are physically based and need a variety of input data. The FAO-56 Penman–Monteith method (PM) for estimating reference evapotranspiration (ET0) is recommend for irrigation scheduling worldwide, because PM generally yields the best results under various climatic conditions. This study investigates the abilities of artificial neural networks (ANN) to improve the accuracy of monthly evaporation estimation in sub-humid climatic region of Dehradun. In the first part of the study, different ANN models, comprising various combinations of training function and number of neutrons were developed to estimate the ET0 and it has been compared with the Penman–Monteith (PM) ET0 as the ideal (observed) ET0. Various statistical approaches were considered to estimate the model performance, i.e. Coefficient of Correlation (r), Sum of Squared Errors, Root Mean Square Error, Nash–Sutcliffe Efficiency Index (NSE) and Mean Absolute Error. The ANN model with Levenberg–Marquardt training algorithm, single hidden layer and nine number of neutron schema was found the best predicting capabilities for the study station with Coefficient of Correlation (r) and NSE value of 0.996 and 0.991 for calibration period and 0.990 and 0.980 for validation period, respectively. In the subsequent part of the study, the trend analysis of ET0 time series revealed a rising trend in the month of March, and a falling trend during June to November, except August, with more than 90% significance level and the annual declining rate was found to 1.49 mm per year.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Evapotranspiration (ET) is one of the major components to identify the behaviour of hydrologic cycle. Correct estimation of reference evapotranspiration (ET0) is necessary for determining irrigation demands, irrigation scheduling, water resources management, and environmental impact assessment, water balance studies at regional and local levels, and modelling of various rainfall-runoff and ecosystem models. Further, the actual ET can be determined using crop coefficients, which is mainly a function of various crop characteristics and local environmental conditions. This paper deals only with the estimation of ET0. Inaccurate estimates of ET0 can lead to unproductive use of water, false calibrations of hydrological models, and erratic assessments of groundwater recharge. There are many empirical equations available for estimating ET0, but their cogency is sometimes restricted to particular geographic locations or/and specific climatic conditions. Allen et al. (1998) defined ET0 as “the rate of evapotranspiration from a hypothetical crop with an assumed crop height (0.12 m) and a fixed canopy resistance (70 s/m) and albedo (0.23) which would closely resemble evapotranspiration from an extensive surface of green grass cover of uniform height, actively growing, completely shading the ground and not short of water. The Food and Agriculture Organization (FAO) of the United Nations recently adopted a standardized form of the Penman–Monteith equation (FAO56 PM) in an effort to provide a common, globally valid standard for estimating ET0, developing crop coefficients, and evaluation/calibration of other ET0 methods when Lysimeter measurements are unavailable (Allen et al. 1998). There are more than twenty established methods available for estimating of ET0, these can be broadly classified into three groups temperature-based approaches (i.e. Hargreaves–Samani and Thornthwaite), radiation based approaches (i.e. Priestley–Taylor and Turc) and combination approach (i.e. Penman–Monteith). Most of these methods are physically based and need a variety of input data.
Apart from the tradition modeling techniques, artificial intelligence techniques such as artificial neural networks (ANNs), have proven their feasibility in modeling complex nonlinear phenomena in the recent past (Kumar et al. 2002; Kisi 2006a, b; Rahimikhoob 2010; Kumar et al. 2011; Baba et al. 2013; Goyal et al. 2014; Shamshirband et al. 2015). ANN application to ET modeling initiated when Odhiambo et al. (2001) validated the accurate estimate daily ET0 with the fuzzy ET0 models when compared with FAO56 PM. Further, Kumar et al. (2002) reported the precise ET0 estimations using the developed ANN models with various ANN architectures.
It has been demonstrated that neural networks are a competitive substitute to conventional models for modeling nonlinear systems. Recently, artificial neural networks (ANN) have been applied in meteorological and agro-ecological modelling; most of the applications reported in the literature concern estimation, prediction and classification problems (Dogan 2008; Kim and Kim 2008; Parasuraman et al. 2007; Zanetti et al. 2007; Keskin and Terzi 2006; Sudheer et al. 2003; Trajkovic et al. 2003). Neural network applications have gained popularity due to their functional characteristics, lesser data requirement and capability of long term forecasting which provide many advantages over traditional analytical approaches. There has been a rising drift of application of ANNs in water resources and hydrologic modeling. The basic goal of this paper is to evaluate the comparative performance of ANN based approach with the Penman–Monteith method (Allen et al. 1998) for estimating the ET0 on monthly basis. The trend analysis along with the magnitude of trend of ET0 for the period of 34 years also has been done for the study station located at Doon valley of Shivaliks hills.
Materials and methods
Study area and data used
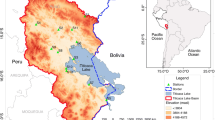
Monthly climatic data used for ET0 estimation were acquired from meteorological observatory from Forest Research Institute (FRI), Dehradun. The observatory is located in the Doon Valley of Shivaliks range of the Himalayas. Its geographical location is 30.20 N latitude and 77.59 E longitude. Dehradun has an altitude of 629 m above mean sea level. It has sub-humid, sub-tropic climate. The summer is too humid and hot, the winter is too cold and the rainy season has a heavy rainfall. The monthly mean of maximum temperature lies in the range of 18.6–38.6 °C. The minimum temperature varies between 1.7 and 23.4 °C. June is the hottest and January is the coolest month. The monsoon season experiences about 87% of the average annual rainfall of about 2041.9 mm. Location map of study area is shown in Fig. 1.

Location map of study area
While modeling, the monthly temperature (Min., Max., and Avg.), relative humidity (Min. and Max.), average wind speed, sunshine hours and rainfall data from 1980 to 2013 (i.e. 408 datasets) were divided into calibration period 1980–2004 (300 datasets) and validation period 2005–2013 (108 datasets).
Penman–Monteith method
Penman–Monteith (PM) FAO56 method for estimating ET0 is a physically based method that unambiguously integrates both physiological and aerodynamic parameters (Xu et al. 2006). It is supposed to be the most consistent and worldwide accepted method for ET0 estimation under various types of climate. The most common form of the PM method in computing ET0 is given as (Allen et al. 1998):
where ET0 is the reference evapotranspiration (mm/day); R n is the net radiation at the crop surface (MJ/m2/d); G is the soil heat flux density (MJ/m2/d); T is the mean daily air temperature (°C); u 2 is the wind speed at a 2 m height above the ground (m/s); e s is the saturation vapour pressure (kPa); e a is the actual vapour pressure (kPa); e s –e a is the saturation VPD (kPa); Δ is the slope of vapour pressure versus temperature curve at temperature T (kPa/°C), and ϒ is the psychrometric constant (kPa/°C). The reference crop was assumed as green grass with an albedo of 0.23.
Artificial neural networks (ANNs)
Commonly an ANN architecture consist of a set of the artificial neuron inputs or signals (x), a weighted average calculation of them (z) using the summation function and weights (w), and some activation function (f) to produce an output, where
The connections between the input layer and the middle or hidden layer contain weights [Eq. (2)], which are usually determined through training the system. The hidden layer sums the weighted inputs and uses the transfer function to create an output value. The transfer function is a relationship between the internal activation level of the neuron (called activation function) and the outputs. A typical transfer function is the sigmoid function, which varies from 0 to 1 for a range of inputs (Melesse et al. 2011). The 408 dataset was divided into training and validation data (300 training and 108 validations) for single hidden layer in three-layer feed forward back propagation algorithm. The feed forward back propagation algorithms was applied using different transfer function and best transfer function (logsig) is chosen on the basis of performance of model. The supervised learning of model is done using reference evapotranspiration (ET0) as output and temperature (Min., Max., and Avg.), relative humidity (Min. and Max.), average wind speed, and sunshine hours as input parameters.
Levenberg–Marquardt back propagation
The Levenberg–Marquardt also known as the damped least-squares (DLS) method is used to solve non-linear least squares problems. It is a trust region-based method with a hyper-spherical trust region (Ajmera and Goyal 2012; Kumar et al. 2015). The Levenberg–Marquardt algorithm uses this approximation to the Hessian matrix in the following Newton-like update
where J = Jacobian matrix, which contains the first derivatives of the network errors regarding the weights and biases; e = vector of network errors; and I = identity matrix.
When the scalar μ is zero, this is just a Newton’s method, using the approximate Hessian matrix. When μ is large, this becomes gradient descent with a small step size. Newton’s method is faster and more accurate near an error minimum, so the aim is to shift toward Newton’s method as quickly as possible (Hagan and Menhaj 1994 and MATLAB online reference manual). Thus, μ is decreased after each successful step (reduction in performance function) and is increased only when a tentative step would increase the performance function.
Goodness of fit of model performance
The performance of the any model can be evaluated in terms of variety of statistical criteria. However, four standard statistical evaluation criteria, viz. Coefficient of Correlation (r), Sum of Squared Errors (SSE), Root Mean Square Error (RMSE), Nash–Sutcliffe Efficiency Index (NSE) and Mean Absolute Error (MAE) were used to measure the performance of models (Moriasi et al. 2007).
-
1.
Coefficient of correlation (r)
$$r = \frac{{n\left( {\sum {x_{0} \times x_{f} } } \right) - \left( {\sum {x_{0} } } \right) \times \left( {\sum {x_{f} } } \right)}}{{\sqrt {\left[ {n\sum {x_{0}^{2} - \left( {\sum {x_{0} } } \right)^{2} } } \right]\left[ {n\sum {x_{f}^{2} - \left( {\sum {x_{f} } } \right)^{2} } } \right]} }}$$(4)where \(x_{0}\) = observed data, \(x_{f}\) computed data, \(n\) = total number of events considered.
-
2.
Sum of Squared Errors (SSE)
$${\text{SSE}} = \sum\limits_{i = 1}^{n} {\left( {x_{0} - \bar{x}} \right)^{2} }$$(5)where \(x_{0}\) = observed data, \(x_{f}\) computed data.
-
3.
Nash–Sutcliffe Efficiency (NSE):
$${\text{NSE}} = 1 - \frac{{\sum\nolimits_{i = 1}^{n} {\left( {x_{0} - x_{f} } \right)^{2} } }}{{\sum\nolimits_{i = 1}^{n} {\left( {x_{0} - \bar{x}_{0} } \right)^{2} } }}$$(6)where \(x_{0}\) = observed data, \(x_{f}\) computed data, \(\bar{x}\) = mean of the observed data, and \(n\) = total number of events considered.
-
4.
Mean Absolute Error (MAE)
$${\text{MAE}} = 1 - \frac{{\sum\nolimits_{i = 1}^{n} {\left| {x_{0} - x_{f} } \right|} }}{N}$$(7)where \(x_{0}\) = observed data, \(x_{f}\) computed data, \(\bar{x}\) = mean of the observed data, and \(N\) = number of non-missing data points.
Trend analysis
The trend detection in the ET0 time series of the FRI, Dehradun station has been done using the most commonly used non-parametric Mann–Kendall (MK) and Modified Mann–Kendall (MMK) test (Mann 1945; Kendall and Stuart 1961; Kendall 1962). It is a rank-based technique, which is good enough to accommodate the effect of intermediate extremes events and take cares of the skewed variables. The rate of the change in the time series at the said station has also been determined with Sen’ Slope estimator method (Sen 1968). According to this test, the null hypothesis H0 states that the de-seasonalized data (x 1… x n ) is a sample of n independent and identically distributed random variables. The alternative hypothesis H1 of a two-sided test is that the distributions of x k and x j are not identical for all k, j ≤ n with k ≠ j. The test statistic S, which has mean zero and a variance computed by Eq. (4), is calculated using Eqs. (2) and (3), and is asymptotically normal (Hirsch et al. 1982):
The notation t is the extent of any given tie and ∑ t denotes the summation over all ties. In cases where the sample size n > 10, the standard normal variate z is computed using Eq. (5). In a two-sided test for trend, H0 should thus be accepted if |z| ≤ z α/2 at the α level of significance. A positive value of ‘S’ indicates an ‘upward trend’; likewise, a negative value of ‘S’ indicates ‘downward trend’:
The Mann–Kendall test has two parameters that are of importance to trend detection. These parameters are the significance level that indicates the trends strength and the slope magnitude estimates that indicates the direction as well as the magnitude of the trend. The MK test checks the null hypothesis of no trend versus the alternative hypothesis of the existence of increasing or decreasing trend. If Z mk is positive, then the trend is increasing, and if Z mk is negative, then the trend is decreasing.
Trend analysis using the MMK test
The modified Mann–Kendall test is similar to MK test, except the effect of all significant autocorrelation coefficients has to be removed from the time series (Hamed and Rao 1998; Basistha et al. 2009) and its empirical significance level are more accurate. For this purpose, a modified variance of S, designated as Var(S)*, was used as follows:
where n* = effective sample size. The n/n* ratio was computed directly from the equation proposed by Hamed and Rao (1998) as
where n = actual number of observations, and ri = lag-i significant auto coefficient of correlation of rank i of time series. Once Var(S)* was computed from Eq. (6), then it was substituted for Var(S) in Eq. (5). The estimate Z-values is then tested for significance of trend. The normal threshold levels, for various significance levels are as follows: 1.645 for 10%, 1.96 for 5% and 2.33 for 1% level of significance.
Magnitude of the trend
The magnitude of the trend or the rate of change in a time series was estimated using a non-parametric Sen’s slope estimator method (Sen 1968). In this method, a linear trend in the time series is generally assumed and the slope (T i ) of all pairs are first calculated by
where X j and X k area data values at time j and k (j > k), respectively. The median of these N values of T i is Sen’s estimator of slope which is calculated as
The trend is supposed to be upward (increasing) with positive values of B and vice versa.
Result and discussion
ANN model for ET0
Initially the ANN Models have been tested with the different training algorithm and six numbers of neurons and single hidden layer. To get the more accurate ANN model the performance of six predictive training algorithms was evaluated (Table 1) while developing the model itself. The most promising training algorithm in the hidden layer of ANN model was determined by trial and error, at which a model perform better.
Table 1 indicates that model with training algorithm Levenberg–Marquardt algorithm (trainlm) resulted satisfactory value of coefficient of correlation (r) as 0.997 and 0.989 during training and validation, respectively. The figures in bold represents the best performing indicies. The model performance indices; SSE and RMSE with scaled estimate and target is lowest as 0.733 and 0.049 for training and 1.102 and 0.101 for validation periods, respectively. Predictive power of ANN models, i.e. NSE has been worked out and found highest as 0.994 and 0.978 for training and validation runs, respectively, for model with trainlm function. MAE was found lowest in case tarincgf function. Based on the four out of five performance indices the trainlm function was chosen for further modeling.
Increasing the number of neurons in the hidden layer, the network gets an over fit, that problem has to be resolved. To get the optimum number of neurons at which network should have to perform its best, trial and error method has been applied. Optimization of the number of neurons for further modeling exercise is one of the most crucial part of any ANN model development. The model with learning function “trainlm” trained with 75% of data has been assessed for optimum number of neurons. Neurons in the intermediate hidden layer have been varied from 1 to 10. The comparison of different performance parameters presented in Table 2 for the neuron variation. It can be identified that model with “trainlm” algorithm and nine neurons performed best for the validation results for most of the statistical indices. Scatterplots between observed (FAO56-PM) and modelled (ANN) ET0 for validation and calibration runs can be shown in Fig. 2 demonstrating the model performance. It can be observed from these scatterplots that ANN model has a strong predictive power for the given data sets and ET0 for the FRI, station Dehradun ranges from 2.4 to 5.0 mm/day.

Performance of ANN model with “trainlm” training algorithm at nine neurons for ET0 estimation for calibration (left) and validation (right) runs
The values of mean monthly FAO-PM ET0 and predicted ET0 with the ANN model with “trainlm” training algorithm at nine neurons can be compared as shown in Table 3. It can be perceived that the value of ET0 for the pre-monsoon months, i.e. summer season is higher due to hot and humid weather conditions and the lowest ET0 values were appearing during the winter months. The total annual ET0 was observed to be 1300.85 mm. And it is found comparable and close to the model predicted annual ET0 value of 1306.55 mm. Figure 3 represents the basic statistic of ET0 for the study period of 34 years (1980–2013) in the form of box plot.

Box plots for the annual and seasonal ET0
Trend analysis
The annual, seasonal, and monthly time series of ET0 for the study station were examined for the possible trend detection. The Z-statistic values of monotonic trend test were obtained through the nonparametric Mann–Kendall and Modified Mann–Kendall tests. As a precautionary step, the significant lag-1 serial correlation effect has been removed from the time series of ET0 before the trend testing. The FRI station, Dehradun observed significant annual ET0 decreases at a rate of 1.49 mm/year on annual basis.
Table 4 represents the trend statistics MK_Z and MMK_Z with the magnitude of the trend (Sen’s slope). It can be observed from the Table 4 that the FRI station, Dehradun is showing an increasing trend in the month of March, and a decreasing trend during June to November, except August, with more than 90% significance. The monsoon and post-monsoon season are witnessing the falling ET0 trend at a rate of 1.03 and 0.51 mm/year with a significance level of 95 and 99%, respectively, whereas the winter and pre-monsoon seasons are not having any trends. Overall, the station is supporting a decreasing trend in the ET0 at 95% significance level with the rate of 1.49 mm/year on annual basis.
Conclusion
Correct estimation of evapotranspiration is prerequisite for the precise planning and management of irrigation schemes, hydrological modeling, groundwater recharge, crop performance, and land use planning, etc., and it became much more important in regions of arid and semiarid zones. However, it is difficult to obtain precise field measurement due to complex nature of the process itself, spatial variability, atmospheric instability, etc. There are numerous methods of computing ET, but the Penman–Monteith (PM) equation which provides the most reliable results for the estimates of reference evapotranspiration (ET0) in most of the regions and for varied weather condition, has been adopted by Food and Agriculture Organization (FAO). In the present study, performance evaluation and comparison of simulated ET0 by FAO56 PM and an ANN model with single layer feed forward back propagation algorithm has been carried out. Temperature (Min., Max., and Avg.), relative humidity (Min. and Max.), average wind speed, sunshine hours and rainfall data from the meteorological monitoring station located in FRI, Dehradun on monthly basis for a period of 34 years (1980–2013) were used as inputs to predict ET0.
The ANN models for this study were developed in neural network (nn) module of MATLAB software. The basic model architecture was optimized in term of training algorithms and number of neurons in the hidden layer of the model. Six algorithms have been tested for training the neural network, followed by evaluation of the model performance by varying the number of neurons from 1 to 10 in the hidden layer. Developed model has been evaluated using various performance indices, viz. coefficient of correlation (r), MSE, RMSR and NSE. Further, the trend analysis and magnitude of trend of ET0 has been carried out using MK and MMK testing methods.
Highest value of coefficient of correlation between ANN modelled and FAO56 PM estimated ET0 was found 0.993 and 0.956 during training and validation, respectively. Which shows the good agreement between observed and estimated ET0. The ANN model with “trainlm” algorithm with nine neurons was found best for simulating the ET0 among the all iteration. In view of the ET0 trends, the study concludes that the FRI station Dehradun is experiencing the falling trend in last 34 years at the rate of 1.49 mm/year at a significance level of 90%. The modeling approach presented in this paper demonstrated the potential of the predictive power of the ANN architecture.
References
Ajmera TK, Goyal MK (2012) Development of stage–discharge rating curve using model tree and neural networks: an application to Peachtree Creek in Atlanta. Expert Syst Appl 39(5):5702–5710
Allen RG, Pereira LS, Raes D, Smith M (1998) Crop evapotranspiration: guidelines for computing crop requirements. FAO Irrigation and Drainage Paper No. 56, FAO Rome, Italy
Baba APA, Shiri J, Kisi O, Fard AF, Kim S, Amini R (2013) Estimating daily reference evapotranspiration using available and estimated climatic data by adaptive neuro-fuzzy inference system (ANFIS) and artificial neural network (ANN). Hydrol Res 44(1):131–146
Basistha A, Arya DS, Goel NK (2009) Analysis of historical changes in rainfall in the Indian Himalayas. Int J Climatol 29:555–572
Doğan E (2008) Reference evapotranspiration estimation using adaptive neuro-fuzzy inference systems. Irrig Drain 58(5):617–628
Goyal MK, Bharti B, Quilty J, Adamowski J, Pandey A (2014) Modeling of daily pan evaporation in sub tropical climates using ANN, LS-SVR, Fuzzy Logic, and ANFIS. Expert Syst Appl 41(11):5267–5276
Hagan MT, Menhaj MB (1994) Training feedforward networks with the Marquardt algorithm. IEEE Trans Neural Netw 5(6):989–993
Hamed KH, Rao AR (1998) A modified Mann–Kendall trend test for autocorrelated data. J Hydrol 204:182–196
Hirsch RM, Slack JR, Smith RA (1982) Techniques of trend analysis for monthly water quality data. Water Resour Res 18(1):107–121
Kendall MG (1962) Rank correlation methods, 3rd edn. Hafner Publishing Company, New York
Kendall MG, Stuart A (1961) The advance theory of statistics, 2nd edn. Hafner Publishing Co, New York
Keskin ME, Terzi O (2006) Artificial neural network models of daily pan evaporation. J Hydrol Eng 11(1):65–70
Kim S, Kim HS (2008) Neural networks and genetic algorithm approach for nonlinear evaporation and evapotranspiration modeling. J Hydrol 351:299–317
Kisi O (2006a) Evapotranspiration estimation using feed-forward neural networks. Nord Hydrol 37(3):247–260
Kisi O (2006b) Generalized regression neural networks for evapotranspiration modelling. Hydrol Sci J J Des Sci Hydrol 51(6):1092–1105
Kumar M, Raghuwanshi NS, Singh R, Wallender WW, Pruitt WO (2002) Estimating evapotranspiration using artificial neural network. J Irrig Drain Eng ASCE 128(4):224–233
Kumar M, Raghuwanshi NS, Singh R (2011) Artificial neural networks approach in evapotranspiration modeling: a review. Irrig Sci 29(1):11–25
Kumar D, Pandey A, Sharma N, Flügel WA (2015) Evaluation of TRMM-precipitation with rain-gauge observation using hydrological model J2000. J Hydrol Eng E5015007. doi:10.1061/(ASCE)HE.1943-5584.0001317
Mann HB (1945) Nonparametric tests against trend. Econometrica 13:245–259
MATLAB (Mathwork) online reference manual. https://in.mathworks.com/help/nnet/ref/trainlm.html?requestedDomain=www.mathworks.com. Accessed 15 Dec 2016 [online]
Melesse AM, Ahmad S, McClain ME, Wang X, Lim YH (2011) Suspended sediment load prediction of river systems: an artificial neural network approach. Agric Water Manag 98(5):855–866
Moriasi DN, Arnold JG, Van Liew MW, Bingner RL, Harmel RD, Veith TL (2007) Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans ASABE 50(3):885–900
Odhiambo LO, Yoder RE, Yoder DC, Hines JW (2001) Optimization of fuzzy evapotranspiration model through neural training with input–output examples. Trans ASAE 44(6):1625–1633
Parasuraman K, Elshorbagy A, Carey SK (2007) Modelling the dynamics of the evapotranspiration process using genetic programming. Hydrol Sci J 52(3):563–578
Rahimikhoob A (2010) Estimation of evapotranspiration based on only air temperature data using artificial neural networks for a subtropical climate in Iran. Theor Appl Climatol 101(1–2):83–91
Sen PK (1968) Estimates of the regression coefficient based on Kendall’s tau. J Am Stat Assoc 63:1379–1389
Shamshirband S, Amirmojahedi M, Gocić M, Akib S, Petković D, Piri J, Trajkovic S (2015) Estimation of reference evapotranspiration using neural networks and cuckoo search algorithm. J Irrig Drain Eng 142(2):04015044
Sudheer KP, Gosain AK, Ramasastri KS (2003) Estimating actual evapotranspiration from limited climatic data using neural computing technique. J Irrig Drain Eng ASCE 129(3):214–218
Trajkovic S, Todorovic B, Stankovic M (2003) Forecasting of reference evapotranspiration by artificial neural networks. J Irrig Drain Eng ASCE 129(6):454–457
Xu CY, Gong LB, Jiang T, Chen DL, Singh VP (2006) Analysis of spatial distribution and temporal trend of reference evapotranspiration and pan evaporation in Changjiang (Yangtze River) catchment. J Hydrol 327:81–93
Zanetti SS, Sousa EF, Oliveira VPS, Almeida FT, Bernardo S (2007) Estimating evapotranspiration using artificial neural network and minimum climatological data. J Irrig Drain Eng ASCE 133(2):83–89
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Nema, M.K., Khare, D. & Chandniha, S.K. Application of artificial intelligence to estimate the reference evapotranspiration in sub-humid Doon valley. Appl Water Sci 7, 3903–3910 (2017). https://doi.org/10.1007/s13201-017-0543-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13201-017-0543-3