
Abstract
L-convex sets are one of the most fundamental concepts in discrete convex analysis. Furthermore, the Minkowski sum of two L-convex sets, called L\(_{2}\)-convex sets, is an intriguing object that is closely related to polymatroid intersection. This paper reveals the polyhedral description of an L\(_{2}\)-convex set, together with the observation that the convex hull of an L\(_{2}\)-convex set is a box-TDI polyhedron. Two different proofs are given for the polyhedral description. The first is a structural short proof, relying on the conjugacy theorem in discrete convex analysis, and the second is a direct algebraic proof, based on Fourier–Motzkin elimination. The obtained results admit natural graph representations. Implications of the obtained results in discrete convex analysis are also discussed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In discrete convex analysis (DCA), L-convex functions form one of the most fundamental classes of discrete convex functions [17, 18, 20]. The concept of L-convex functions, as well as their variant called L\(^{\natural }\)-convex functions,Footnote 1 sheds new light on algorithms in combinatorial optimization. For example, Dijkstra’s algorithm for shortest paths can be viewed as an instance of L-convex function minimization [24]. L-convex functions have applications in several other fields including computer vision [28], operations research (inventory theory, scheduling, etc.) [1, 2, 29], and economics and auction theory [21, 28]. Furthermore, the infimal convolution of two L-convex functions, called L\(_{2}\)-convex functions, are the most intriguing objects in the duality theory in discrete convex analysis [18, Chapter 8]. L\(_{2}\)-convex functions are known to coincide with the conjugate of M\(_{2}\)-convex functions, the latter corresponding to polymatroid intersection investigated in depth in combinatorial optimization [27].
Concepts of discrete convex sets are even more fundamental than those of discrete convex functions, but at the same time, capture the essential properties of the corresponding discrete convex functions. For example, the set of minimizers of an L-convex function is an L-convex set. Moreover, a function is L-convex if and only if the set of minimizers of the function modified by an arbitrary linear function is always L-convex [18, Section 7.5]. The set version of L\(_{2}\)-convexity is defined as the Minkowski sum (vector addition) of two L-convex sets.
The objective of this paper is to investigate the polyhedral description of L\(_{2}\)-convex sets. That is, we aim at obtaining a system of inequalities whose solution set coincides with the convex hull of a given L\(_{2}\)-convex set. Such polyhedral description forms the basis of a standard approach in combinatorial optimization, called polyhedral combinatorics [26, 27]. Polyhedral descriptions are known for other kinds of discrete convex sets, including L-convex, L\(^{\natural }\)-convex, M-convex, and M\(^{\natural }\)-convex sets. Polyhedral descriptions are also known for M\(_{2}\)-convex and M\(^{\natural }_{2}\)-convex sets, which correspond to polymatroid intersection. In addition, the polyhedral description of multimodular sets has recently be obtained in [15]. It is worth noting that integrally convex sets [18, Section 3.4] do not seem to admit a polyhedral characterization because every set consisting of \(\{ 0, 1\}\)-vectors is an integrally convex set, which fact implies that every \(\{ 0, 1\}\)-polytope is the convex hull of an integrally convex set.
In this paper we obtain polyhedral descriptions of an L\(_{2}\)-convex set, together with the observation that the convex hull of an L\(_{2}\)-convex set is a box-TDI polyhedron. Two versions of the polyhedral description of an L\(_{2}\)-convex set are given, Theorem 3.1 and Theorem 4.1. The former is a basic form, while the latter is a refinement with reference to a graph representation depending on the constituent L-convex sets. Although the basic form follows from its refinement in Theorem 4.1, we give an independent short proof for Theorem 3.1 relying on structural results in discrete convex analysis such as the conjugacy theorem and M\(_{2}\)-optimality criterion. Two different proofs are given to the refined form in Theorem 4.1. The first is a structural proof, which is similar in vein to the proof of Theorem 3.1 but uses more detailed versions of the conjugacy theorem and M\(_{2}\)-optimality criterion. The second is a direct algebraic proof, which is based on Fourier–Motzkin elimination applied to the combined system of inequalities for the constituent L-convex sets and does not use any results from discrete convex analysis. The obtained result (the basic form in Theorem 3.1 without resort to the refinement in Theorem 4.1) has several implications in discrete convex analysis, including an alternative proof of the fundamental fact that a set of integer vectors is a box (interval) if and only if it is both L\(^{\natural }_{2}\)-convex and M\(^{\natural }_{2}\)-convex. The logical structure of the paper may be summarized by the diagram in Fig 1.

Logical structure of this paper
This paper is organized as follows. Section 2 recapitulates basic facts from discrete convex analysis, focusing on L-convex and L\(_{2}\)-convex sets. The main results are given in Sects. 3 and 4 with illustrative examples and structural proofs. The proof by the Fourier–Motzkin elimination is given in Sect. 5. Applications of the obtained results in discrete convex analysis are shown in Sect. 6. Finally, Sect. 7 concludes the paper with a summary of our present knowledge about the polyhedral description of discrete convex sets, and Appendix gives definitions from discrete convex analysis.
2 Preliminaries
Basic facts about L-convex and L\(_{2}\)-convex sets are introduced in this section.
2.1 Basic notation
Let \(N = \{ 1,2,\ldots , n \}\). For a vector \(x = (x_{1}, x_{2}, \ldots , x_{n})\) and a subset I of N, we use notation \(x(I) = \sum _{i \in I} x_{i}\). The inner product of two vectors x and y is denoted by \(\langle x,y \rangle \). For a subset I of N, we denote by \(e^{I}\) the characteristic vector of I; the ith component of \(e^{I}\) is equal to 1 or 0 according to whether \(i \in I\) or not. We use a short-hand notation \(e^{i}\) for \(e^{ \{ i \} }\), which is the ith unit vector.
For vectors \(a \in ({\mathbb {R}}\cup \{ -\infty \})^{n}\) and \(b \in ({\mathbb {R}}\cup \{ +\infty \})^{n}\) with \(a \le b\), the box (rectangle, interval) between a and b is denoted by \([a,b]_{{\mathbb {R}}}\), i.e.,
For integer vectors \(a \in ({\mathbb {Z}}\cup \{ -\infty \})^{n}\) and \(b \in ({\mathbb {Z}}\cup \{ +\infty \})^{n}\) with \(a \le b\), the box of integers between a and b means \([a,b]_{{\mathbb {R}}} \cap {\mathbb {Z}}^{n}\). The convex hull of a set S \((\subseteq {\mathbb {Z}}^{n})\) is denoted by \(\overline{S}\).
For two vectors \(x, y \in {\mathbb {R}}^{n}\), the vectors of componentwise maximum and minimum of x and y are denoted, respectively, by \(x \vee y\) and \(x \wedge y\), i.e.,
The vector with all components equal to 1 is denoted by \(\mathbf{1}\), that is, \(\mathbf{1}=(1,1,\ldots , 1) = e^{N}\).
2.2 L-convex sets
A nonempty set S \((\subseteq {\mathbb {Z}}^{n})\) is called L-convex if it satisfies the following two conditions:
The first condition (2.1) means that S forms a sublattice of \({\mathbb {Z}}^{n}\). A polyhedron P \((\subseteq {\mathbb {R}}^{n})\) is called L-convex if
The reader is referred to [22, Proposition 2.5] for characterizations of L-convex sets. The following polyhedral description of an L-convex set is known [18, Section 5.3].
Theorem 2.1
-
(1)
A set \(S \subseteq {\mathbb {Z}}^{n}\) is L-convex if and only if it can be represented as
$$\begin{aligned} S = \{ x \in {\mathbb {Z}}^{n} \mid x_{j} - x_{i} \le \gamma _{ij} \ \ (i,j \in N) \} \end{aligned}$$(2.5)for some \(\gamma _{ij} \in {\mathbb {Z}}\cup \{ +\infty \}\) \((i,j \in N )\) satisfying
$$\begin{aligned} \gamma _{ii} = 0 \qquad (i \in N) \end{aligned}$$(2.6)and the triangle inequality:
$$\begin{aligned} \gamma _{ij} + \gamma _{jk} \ge \gamma _{ik} \qquad (i,j,k \in N). \end{aligned}$$(2.7)Such \(\gamma _{ij}\) is determined from S by
$$\begin{aligned} \gamma _{ij} = \sup \{ x_{j} - x_{i} \mid x \in S \} \qquad (i,j \in N). \end{aligned}$$(2.8) -
(2)
A polyhedron \(P \subseteq {\mathbb {R}}^{n}\) is L-convex if and only if it can be represented as
$$\begin{aligned} P = \{ x \in {\mathbb {R}}^{n} \mid x_{j} - x_{i} \le \gamma _{ij} \ \ (i,j \in N) \} \end{aligned}$$(2.9)for some \(\gamma _{ij} \in {\mathbb {R}}\cup \{ +\infty \}\) \((i,j \in N )\) satisfying (2.6) and (2.7). Such \(\gamma _{ij}\) is determined from P by
$$\begin{aligned} \gamma _{ij} = \sup \{ x_{j} - x_{i} \mid x \in P \} \qquad (i,j \in N). \end{aligned}$$(2.10)
Remark 2.1
Here are additional remarks about the polyhedral descriptions in Theorem 2.1.
-
The correspondence between S and integer-valued \(\gamma \) with (2.6) and (2.7) is bijective (one-to-one and onto) through (2.5) and (2.8).
-
The correspondence between P and real-valued \(\gamma \) with (2.6) and (2.7) is bijective (one-to-one and onto) through (2.9) and (2.10).
-
For any \(\gamma _{ij} \in {\mathbb {R}}\cup \{ +\infty \}\) \((i,j \in N )\) (independent of the triangle inequality), P in (2.9) is an L-convex polyhedron if \(P \ne \emptyset \). We have \(P \ne \emptyset \) if and only if there exists no negative cycle with respect to \(\gamma _{ij}\), where a negative cycle means a set of indices \(i_{1}, i_{2}, \ldots , i_{m}\) such that \(\gamma _{i_{1}i_{2}} +\gamma _{i_{2}i_{3}}+ \cdots +\gamma _{i_{m-1}i_{m}} +\gamma _{i_{m}i_{1}} < 0\).
-
The convex hull of an L-convex set S is an L-convex polyhedron described by integer-valued \(\gamma _{ij} \in {\mathbb {Z}}\cup \{ +\infty \}\) \((i,j \in N )\).
-
For any integer-valued \(\gamma _{ij} \in {\mathbb {Z}}\cup \{ +\infty \}\) \((i,j \in N )\), P in (2.9) (if \(P \ne \emptyset \)) is an integer polyhedron and \(S = P \cap {\mathbb {Z}}^{n}\) is an L-convex set with \(\overline{S} = P\).
The intersection of an L-convex set with a coordinate hyperplane is called an L\(^{\natural }\)-convex set. That is, a nonempty set \(S \subseteq {\mathbb {Z}}^{n}\) is called L\(^{\natural }\)-convex if
for some L-convex set \(T \subseteq {\mathbb {Z}}^{n+1}\), where \(x \in {\mathbb {Z}}^{n}\) and \((x,0) \in {\mathbb {Z}}^{n+1}\) in (2.11). For an L\(^{\natural }\)-convex set S in \({\mathbb {Z}}^{n}\), the set
is L-convex in \({\mathbb {Z}}^{n+1}\). Thus the concepts of L-convex sets and L\(^{\natural }\)-convex sets are essentially equivalent. Moreover, an L-convex set is L\(^{\natural }\)-convex.
Similarly, the intersection of an L-convex polyhedron with a coordinate hyperplane is called an L\(^{\natural }\)-convex polyhedron. That is, a polyhedron \(P \subseteq {\mathbb {R}}^{n}\) is called L\(^{\natural }\)-convex if
for some L-convex polyhedron \(Q \subseteq {\mathbb {R}}^{n+1}\). For an L\(^{\natural }\)-convex polyhedron P in \({\mathbb {R}}^{n}\), the set
is an L-convex polyhedron in \({\mathbb {R}}^{n+1}\). An L-convex polyhedron is L\(^{\natural }\)-convex.
The polyhedral description of an L\(^{\natural }\)-convex set (resp., polyhedron) can be obtained from Theorem 2.1 with the aid of the relation (2.11) (resp., (2.13)).
Theorem 2.2
-
(1)
A set \(S \subseteq {\mathbb {Z}}^{n}\) is L\(^{\natural }\)-convex if and only if it can be represented as
$$\begin{aligned} S = \{ x \in {\mathbb {Z}}^{n} \mid \alpha _{i} \le x_{i} \le \beta _{i} \ \ (i\in N), \ x_{j} - x_{i} \le \gamma _{ij} \ \ (i,j \in N) \} \end{aligned}$$(2.15)for some \(\alpha _{i} \in {\mathbb {Z}}\cup \{ -\infty \}\), \(\beta _{i} \in {\mathbb {Z}}\cup \{ +\infty \}\), and \(\gamma _{ij} \in {\mathbb {Z}}\cup \{ +\infty \}\) \((i,j \in N )\) with \(\gamma _{ii} =0\) \((i \in N )\) such that \(\tilde{\gamma }_{ij}\) defined for \(i,j \in N \cup \{ 0 \}\) by
$$\begin{aligned} {\tilde{\gamma }}_{00} =0, \qquad {\tilde{\gamma }}_{ij} = \gamma _{ij}, \quad {\tilde{\gamma }}_{i0} = -\alpha _{i}, \quad {\tilde{\gamma }}_{0j} = \beta _{j} \qquad (i,j \in N) \end{aligned}$$(2.16)satisfies the triangle inequality:
$$\begin{aligned} {\tilde{\gamma }}_{ij} + {\tilde{\gamma }}_{jk} \ge {\tilde{\gamma }}_{ik} \qquad (i,j,k \in N \cup \{ 0 \}). \end{aligned}$$(2.17)Such \(\alpha _{i}\), \(\beta _{i}\), \(\gamma _{ij}\) are determined from S by
$$\begin{aligned}&\alpha _{i} = \inf \{ x_{i} \mid x \in S \}, \quad \beta _{i} = \sup \{ x_{i} \mid x \in S \} \qquad (i \in N), \\&\gamma _{ij} = \sup \{ x_{j} - x_{i} \mid x \in S \} \qquad (i,j \in N). \end{aligned}$$ -
(2)
A polyhedron \(P \subseteq {\mathbb {R}}^{n}\) is L\(^{\natural }\)-convex if and only if it can be represented as
$$\begin{aligned} P = \{ x \in {\mathbb {R}}^{n} \mid \alpha _{i} \le x_{i} \le \beta _{i} \ \ (i\in N), \ x_{j} - x_{i} \le \gamma _{ij} \ \ (i,j \in N) \} \end{aligned}$$for some \(\alpha _{i} \in {\mathbb {R}}\cup \{ -\infty \}\), \(\beta _{i} \in {\mathbb {R}}\cup \{ +\infty \}\), and \(\gamma _{ij} \in {\mathbb {R}}\cup \{ +\infty \}\) \((i,j \in N )\) with \(\gamma _{ii} =0\) \((i \in N )\) such that \(\tilde{\gamma }_{ij}\) defined by (2.16) satisfies the triangle inequality (2.17). Such \(\alpha _{i}\), \(\beta _{i}\), \(\gamma _{ij}\) are determined from P by
$$\begin{aligned}&\alpha _{i} = \inf \{ x_{i} \mid x \in P \}, \quad \beta _{i} = \sup \{ x_{i} \mid x \in P \} \qquad (i \in N), \\&\gamma _{ij} = \sup \{ x_{j} - x_{i} \mid x \in P \} \qquad (i,j \in N). \end{aligned}$$
The statements made in Remark 2.1 can be adapted to L\(^{\natural }\)-convexity. The reader is referred to [18, Section 5.5] and [22, Proposition 2.3] for characterizations of L\(^{\natural }\)-convex sets.
2.3 L\(_{2}\)-convex sets
A nonempty set S \(\subseteq {\mathbb {Z}}^{n}\) is called L\(_{2}\)-convex (resp., L\(^{\natural }_{2}\)-convex) if it can be represented as the Minkowski sum (vector addition) of two L-convex (resp., L\(^{\natural }\)-convex) sets [18, Section 5.5]. That is,
where \(S_{1}\) and \(S_{2}\) are L-convex (resp., L\(^{\natural }\)-convex) sets. Similarly, a polyhedron P \(\subseteq {\mathbb {R}}^{n}\) is called L\(_{2}\)-convex (resp., L\(^{\natural }_{2}\)-convex) if it is the Minkowski sum of two L-convex (resp., L\(^{\natural }\)-convex) polyhedra. An L-convex set is an L\(_{2}\)-convex set, but the converse is not true. Similarly, an L\(^{\natural }\)-convex set is L\(^{\natural }_{2}\)-convex, but the converse is not true. An L\(_{2}\)-convex set (resp., polyhedron) is L\(^{\natural }_{2}\)-convex, because L-convex sets (resp., polyhedra) are L\(^{\natural }\)-convex.
It is a basic fact that an L\(^{\natural }_{2}\)-convex set (resp., polyhedron) is precisely the intersection of an L\(_{2}\)-convex set (resp., polyhedron) with a coordinate hyperplane,Footnote 2 which is proved in Proposition 2.2 below. We first note a simple fact.
Proposition 2.1
-
(1)
For any \(T \subseteq {\mathbb {Z}}^{n+1}\), define \(\varphi (T):= \{ x \mid (x,0) \in T \}\). If \(T_{1}\) and \(T_{2}\) have the property (2.2), then \(\varphi (T_{1} + T_{2}) = \varphi (T_{1}) + \varphi (T_{2})\).
-
(2)
For any \(Q \subseteq {\mathbb {R}}^{n+1}\), define \(\varphi (Q):= \{ x \mid (x,0) \in Q \}\). If \(Q_{1}\) and \(Q_{2}\) have the property (2.4), then \(\varphi (Q_{1} + Q_{2}) = \varphi (Q_{1}) + \varphi (Q_{2})\).
Proof
We prove (1) only, while (2) can be proved in the same way. For any \(T_{1}, T_{2} \subseteq {\mathbb {Z}}^{n+1}\), we have
whereas
Therefore,
The reverse inclusion (\(\supseteq \)) holds under (2.2). Take any \(x \in \varphi (T_{1} + T_{2})\). Then there exist \((y,\alpha ) \in T_{1}\) and \((z,-\alpha ) \in T_{2}\) satisfying \(x = y+z\). By (2.2), we have
from which follows that \(x = y+z = (y - \alpha \mathbf{1}) + (z + \alpha \mathbf{1}) \in \varphi (T_{1}) + \varphi (T_{2})\). \(\square \)
Proposition 2.2
-
(1)
For each L\(_{2}\)-convex set \(T \subseteq {\mathbb {Z}}^{n+1}\), \(S:= \{ x \in {\mathbb {Z}}^{n} \mid (x,0) \in T \}\) is an L\(^{\natural }_{2}\)-convex set, and every L\(^{\natural }_{2}\)-convex set \(S \subseteq {\mathbb {Z}}^{n}\) arises in this way.
-
(2)
For each L\(_{2}\)-convex polyhedron \(Q \subseteq {\mathbb {R}}^{n+1}\), \(P:= \{ x \in {\mathbb {R}}^{n} \mid (x,0) \in Q \}\) is an L\(^{\natural }_{2}\)-convex polyhedron, and every L\(^{\natural }_{2}\)-convex polyhedron \(P \subseteq {\mathbb {R}}^{n}\) arises in this way.
Proof
We prove (1) only, while (2) can be proved in the same way. Let T be an L\(_{2}\)-convex set, which is represented as \(T=T_{1}+T_{2}\) with two L-convex sets \(T_{1}\) and \(T_{2}\). By the property (2.2) of L-convexity, we have \(\varphi (T_{1} + T_{2}) = \varphi (T_{1}) + \varphi (T_{2})\) in the notation of Proposition 2.1. This shows that \(S=\varphi (T)=\varphi (T_{1} + T_{2})= \varphi (T_{1}) + \varphi (T_{2})\) is L\(^{\natural }_{2}\)-convex. Conversely, let S be an L\(^{\natural }_{2}\)-convex set. By definition, S can be represented as \(S=S_{1}+S_{2}\) with two L\(^{\natural }\)-convex sets \(S_{1}\) and \(S_{2}\). Then \(S_{1}=\varphi (T_{1})\) and \(S_{2}=\varphi (T_{2})\) for some L-convex sets \(T_{1}\) and \(T_{2}\). Let \(T= T_{1} + T_{2}\), which is L\(_{2}\)-convex. It then follows from Proposition 2.1 that \(S= \varphi (T_{1}) + \varphi (T_{2}) = \varphi (T_{1} + T_{2}) = \varphi (T)\). \(\square \)
3 Polyhedral description of L\(_{2}\)-convex sets
3.1 Preliminary considerations
Let \(S = S_{1} + S_{2} = \{ x \mid x = y + z, \ y \in S_{1}, z \in S_{2} \}\) be an L\(_{2}\)-convex set, where \(S_{1}\) and \(S_{2}\) are L-convex sets. By Theorem 2.1, we can represent \(S_{1}\) and \(S_{2}\) as
where \(E_{1}, E_{2} \subseteq (N \times N) {\setminus }\{ (i,i) \mid i \in N \}\), \(\gamma _{ij}^{(1)} \in {\mathbb {Z}}\) (finite-valued) for all \((i,j) \in E_{1}\), and \(\gamma _{ij}^{(2)} \in {\mathbb {Z}}\) for all \((i,j) \in E_{2}\). We do not impose triangle inequality on \(\gamma ^{(k)} = ( \gamma _{ij}^{(k)} \mid (i,j) \in E_{k})\), which is allowed by Remark 2.1. The objective of this preliminary section is to derive a plausible system of inequalities to describe S.
Suppose that there are indices \((i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) such that \((i_{r},j_{r}) \in E_{1}\) and \((i_{r+1},j_{r}) \in E_{2}\) for \(r=1,2,\ldots , m\), where \(i_{m+1} = i_{1}\). By adding inequalities (3.3) for \((i,j)=(i_{r},j_{r})\) with \(r=1,2,\ldots , m\) and (3.4) for \((i,j)=(i_{r+1},j_{r})\) with \(r=1,2,\ldots , m\), we obtain
Since \(y+z = x\), it follows that
For any \((i_{1}, j_{1}, \ldots , i_{m}, j_{m})\), (3.5) is a valid inequality for S, which means that every element x of S satisfies (3.5). By choosing any family \(\mathcal {F}\) of such indices \((i_{1}, j_{1}, \ldots , i_{m}, j_{m})\), we obtain a system of inequalities indexed by \(\mathcal {F}\), for which we have
The inequality in (3.5) has a characteristic feature that each coefficient of the variable x belongs to \(\{ -1,0,+1 \}\) and there are as many “\(+1\)” as “\(-1\)” among the coefficients. The main message of this paper is that an L\(_{2}\)-convex set can indeed be described by such inequalities with a suitable \(\mathcal {F}\).
3.2 Theorems
The following theorem gives a polyhedral description of an L\(_{2}\)-convex set (or polyhedron). The constants \(\gamma _{IJ}\) in (3.7) and (3.8) will be determined in Theorem 4.1 in Sect. 4.
Theorem 3.1
-
(1)
An L\(_{2}\)-convex set \(S \subseteq {\mathbb {Z}}^{n}\) can be represented as
$$\begin{aligned} S = \{ x \in {\mathbb {Z}}^{n} \mid x(J) - x(I) \le \gamma _{IJ}\, {\text{for all}} \,(I,J)\,{\text{with }}\,|I| =|J|, I \cap J = \emptyset \} \end{aligned}$$(3.7)for some \(\gamma _{IJ} \in {\mathbb {Z}}\cup \{ +\infty \}\) indexed by (I, J).
-
(2)
An L\(_{2}\)-convex polyhedron \(P \subseteq {\mathbb {R}}^{n}\) can be represented as
$$\begin{aligned} P = \{ x \in {\mathbb {R}}^{n} \mid x(J) - x(I) \le \gamma _{IJ} \ \text{ for } \text{ all } (I,J)\hbox { with }|I| =|J|, I \cap J = \emptyset \} \end{aligned}$$(3.8)for some \(\gamma _{IJ} \in {\mathbb {R}}\cup \{ +\infty \}\) indexed by (I, J).
Proof
The proof is given in Sect. 3.3. \(\square \) \(\square \)
The following example shows that the number of variables in an inequality \(x(J) - x(I) \le \gamma _{IJ}\), which is \(|I|+|J|\), is not bounded by a constant.
Example 3.1
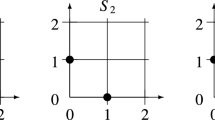
Let \(n = 2m\) be an even integer, and consider the L\(_{2}\)-convex set \(S = S_{1} + S_{2}\) defined by L-convex sets
where \(z_{n+1} = z_{1}\). The description of \(S = S_{1} + S_{2}\) is given by
which is shown later in Example 4.4 in Sect. 4.2. All variables are involved in a single inequality.
By Proposition 2.2, an L\(^{\natural }_{2}\)-convex set is nothing but the intersection of an L\(_{2}\)-convex set with a coordinate hyperplane. Hence Theorem 3.1 immediately implies the following theorem for an L\(^{\natural }_{2}\)-convex set (or polyhedron).
Theorem 3.2
-
(1)
An L\(^{\natural }_{2}\)-convex set \(S \subseteq {\mathbb {Z}}^{n}\) can be represented as
$$\begin{aligned} S = \{ x \in {\mathbb {Z}}^{n} \mid&\ x(J) - x(I) \le \gamma _{IJ} \ \text{ for } \text{ all } (I,J) \nonumber \\&\ \text{ with } |I|-|J| \in \{ -1,0,1 \}, I \cap J = \emptyset \} \end{aligned}$$(3.12)for some \(\gamma _{IJ} \in {\mathbb {Z}}\cup \{ +\infty \}\) indexed by (I, J).
-
(2)
An L\(^{\natural }_{2}\)-convex polyhedron \(P \subseteq {\mathbb {R}}^{n}\) can be represented as
$$\begin{aligned} P = \{ x \in {\mathbb {R}}^{n} \mid&\ x(J) - x(I) \le \gamma _{IJ} \ \text{ for } \text{ all } (I,J) \nonumber \\&\ \text{ with } |I|-|J| \in \{ -1,0,1 \}, I \cap J = \emptyset \} \end{aligned}$$(3.13)for some \(\gamma _{IJ} \in {\mathbb {R}}\cup \{ +\infty \}\) indexed by (I, J).
Example 3.2
Consider \( S = \{ (0,0,0), (1,1,0), (0,1,1), (1,2,1) \}\), which is L\(^{\natural }_{2}\)-convex (but not L\(^{\natural }\)-convex). Indeed we have \(S = S_{1} + S_{2}\) with two L\(^{\natural }\)-convex sets \(S_{1}= \{ (0,0,0), (1,1,0) \}\) and \(S_{2} = \{ (0,0,0), (0,1,1) \}\). (This is an example taken from [23, Example 3.11].) All four points of S lie on the hyperplane \(x_{1} - x_{2} + x_{3} = 0\), and it is easy to see, by inspection, that
gives a polyhedral description of the form of (3.12) in Theorem 3.2.
Remark 3.1
The inequality \(x(J) - x(I) \le \gamma _{IJ}\) in (3.8) can be rewritten as \(\langle e^{J} - e^{I}, x \rangle \le \gamma _{IJ}\), where \(\langle \cdot , \cdot \rangle \) denotes the inner product, and \(e^{I}\) and \(e^{J}\) are the characteristic vectors of I and J, respectively. This shows that if the polyhedron P is full-dimensional, the normal vector of a facet of P is of the form of \(c (e^{J} - e^{I})\) with \(c \ne 0\).
Remark 3.2
Theorem 3.1 as well as Theorem 3.2 is consistent with the general result [31, Proposition 7.12] on convex polytopes (bounded polyhedra) that the normal fan of the Minkowski sum of two polytopes \(P_{1}\) and \(P_{2}\) is the common refinement of the individual fans, which means that each normal cone of \(P=P_{1} + P_{2}\) is the intersection of a normal cone of \(P_{1}\) and that of \(P_{2}\). By Theorem 2.1, every normal cone of \(P_{k}\) \((k=1,2)\) is spanned by vectors of the form \(e^{j} - e^{i}\). These two facts, when combined, indicate that each normal cone of P is spanned by vectors of the form \(\sum _{(i,j) \in K} c_{ij}(e^{j} - e^{i})\) with coefficients \(c_{ij} \in {\mathbb {R}}\) for some set K of pairs (i, j), where \(I:= \{ i \mid (i,j) \in K \}\) and \(J:= \{ j \mid (i,j) \in K \}\) may not be disjoint. The expression (3.8) shows that we can take \(c_{ij}=1\), from which follows that \(I \cap J = \emptyset \) can be assumed.
3.3 Proof of Theorem 3.1
In this section we prove Theorem 3.1 for an L\(_{2}\)-convex set (or polyhedron) using concepts and results from discrete convex analysis [18]. The reader is referred to Appendix A.1 for the definitions of L\(_{2}\)-convex and M\(_{2}\)-convex functions.
For a set \(T \subseteq {\mathbb {Z}}^{n}\), in general, the indicator function \(\delta _{T}: {\mathbb {Z}}^{n} \rightarrow \{ 0, +\infty \}\) is defined by
For an integer-valued function \(h: {\mathbb {Z}}^{n} \rightarrow {\mathbb {Z}}\cup \{ +\infty \}\) (with \(h(x_{0}) < +\infty \) for some \(x_{0} \in {\mathbb {Z}}^{n}\)), the (integral) conjugate function \(h^{\bullet }: {\mathbb {Z}}^{n} \rightarrow {\mathbb {Z}}\cup \{ +\infty \}\) is defined by
The (integral) subdifferential of h at x is defined by
A vector p belonging to \(\partial h(x)\) is called an (integral) subgradient of h at x.
Let \(S \subseteq {\mathbb {Z}}^{n}\) be an L\(_{2}\)-convex set, and denote its indicator function by g, that is, \(g = \delta _{S}: {\mathbb {Z}}^{n} \rightarrow \{ 0, +\infty \}\). Since S is an L\(_{2}\)-convex set, g is an L\(_{2}\)-convex function. Let f denote the conjugate function of g, that is, \(f = g^{\bullet }\). By the conjugacy relation between L\(_{2}\)-convexity and M\(_{2}\)-convexity ([18, Theorem 8.48]), the function \(f: {\mathbb {Z}}^{n} \rightarrow {\mathbb {Z}}\cup \{ +\infty \}\) is an M\(_{2}\)-convex function, and \(g = f^{\bullet }\). In addition, \(f(\varvec{0})=0\) and f is positively homogeneous, since it is the conjugate of an indicator function. We make use of a fundamental relation
which can be proved as
See Section 8.1.3 (in particular, (8.17) and Fig. 8.1) of [18] for the correspondence between indicator functions and positively homogeneous convex functions in discrete convex analysis.
In (3.16), the function \(f(z) - \langle p, z \rangle \) is M\(_{2}\)-convex. For a general M\(_{2}\)-convex function \(h: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\), it is known as M\(_{2}\)-optimality criterion [18, Theorem 8.32] that a vector \(z^{*} \in {\mathbb {Z}}^{n}\) with \(h(z^{*}) < +\infty \) is a minimizer of h if and only if
for all (I, J) with \(|I| =|J|\) and \(I \cap J = \emptyset \). This condition (3.17) for \(h(z) = f(z) - \langle p, z \rangle \) and \(z^{*} =\varvec{0}\) reads
Combining this with (3.16), we obtain
This gives the desired polyhedral description in (3.7) with \(\gamma _{IJ} = f(e^{J} - e^{I})\).
The expression (3.8) for an L\(_{2}\)-convex polyhedron can be established in a similar manner by using the polyhedral version of the conjugacy relation between L\(_{2}\)-convexity and M\(_{2}\)-convexity, which can be derived easily from the conjugacy between polyhedral L-convex and M-convex functions in [18, Theorem 8.4]. Theorem 3.1 also follows from Theorem 4.1 to be established later.
Remark 3.3
The number of inequalities necessary to describe an L\(_{2}\)-convex set in \({\mathbb {Z}}^{n}\) can be exponential in n. This can be seen as follows. Consider a matroid intersection problem, and let B be a common base. The set of the characteristic vectors of common bases is an M\(_{2}\)-convex set contained in \(\{ 0,1 \}^{n}\). Let Q denote the convex hull of this M\(_{2}\)-convex set. The tangent cone of Q at \(e^{B}\) (the characteristic vector of B), to be denoted by \(Q_{B}\), is an M\(_{2}\)-convex polyhedron and the extreme rays of tangent cone \(Q_{B}\) correspond to common bases adjacent to B. The adjacency relation in matroid intersection has been investigated in [8, 12], and an instance of a common base with exponentially many adjacent common bases has been constructed in [13]. Let B be such a common base with exponentially many adjacent common bases. Then the tangent cone \(Q_{B}\) has exponentially many extreme rays. Next consider the dual cone of \(Q_{B}\), and call it P. By the conjugacy between M\(_{2}\)-convexity and L\(_{2}\)-convexity ([18, Theorem 8.48]), P is an L\(_{2}\)-convex polyhedron, and its facets correspond to extreme rays of \(Q_{B}\). Moreover, P is an integral polyhedron, implying that P is the convex hull of an L\(_{2}\)-convex set \(S = P \cap {\mathbb {Z}}^{n}\). It follows that the description of this L\(_{2}\)-convex set S requires exponentially many inequalities.
4 Refinement of the polyhedral description
In Theorems 3.1 and 3.2 we have identified inequalities of the form \(x(J) - x(I) \le \gamma _{IJ}\) to describe L\(_{2}\)-convex and L\(^{\natural }_{2}\)-convex sets (and polyhedra). In this section we establish their refinements in Theorems 4.1 and 4.2 with the aid of a graph representation.
4.1 Graph representations
Let \(S = S_{1}+S_{2}\) be an L\(_{2}\)-convex set with two L-convex sets \(S_{1}\) and \(S_{2}\). By Theorem 2.1, each L-convex polyhedron \(S_{k}\) \((k=1,2)\) is described as
where \(E_{k} \subseteq (N \times N) {\setminus }\{ (i,i) \mid i \in N \}\) and \(\gamma _{ij}^{(k)} \in {\mathbb {Z}}\) (finite-valued) for all \((i,j) \in E_{k}\). We do not impose triangle inequality on \(\gamma ^{(k)} = ( \gamma _{ij}^{(k)} \mid (i,j) \in E_{k})\), which is allowed by Remark 2.1.
With reference to (4.1) we consider a directed graph \(G_{k}=(N,E_{k})\) with vertex set \(N = \{ 1,2,\ldots , n \}\) and edge set \(E_{k}\). Each edge \((i,j) \in E_{k}\) is associated with a length of \(\gamma _{ij}^{(k)}\). We denote the reorientation of \(G_{2}\) by \(G_{2}^{\circ }=(N,E_{2}^{\circ })\), where \(E_{2}^{\circ }:= \{ (i,j) \mid (j,i) \in E_{2} \}\) and an edge (i, j) of \(G_{2}^{\circ }\) has length \(\gamma ^{(2)}_{ji}\). The union of \(G_{1}\) and \(G_{2}^{\circ }\) is denoted by \(G_{1} + G_{2}^{\circ } = (N, E_{1} \cup E_{2}^{\circ })\) or simply by \(G_{*} = (N, E_{*})\) with \(E_{*} = E_{1} \cup E_{2}^{\circ }\). Parallel edges may exist in \(G_{*} = G_{1} + G_{2}^{\circ }\). When necessary, an edge connecting i to j in \(E_{1}\) (resp., \(E_{2}^{\circ }\)) is denoted by \((i,j)_{1}\) (resp., \((i,j)_{2}\)). That is, \((i,j)_{1} \in E_{1}\) and \((i,j)_{2} \in E_{2}^{\circ }\). The edge length \(\gamma \) in \(G_{*} = (N, E_{*})\) is defined for \(e \in E_{*}\) by
For \(k=1,2\), each graph \(G_{k}\) contains no negative cycles by \(S_{k} \ne \emptyset \) (Remark 2.1). Let \(\lambda (i,j;G_{k})\) denote the minimum \(\gamma ^{(k)}\)-length of a path connecting i to j in \(G_{k}\), where \(\lambda (i,j;G_{k}) = +\infty \) if there is no such path. Define \(\lambda (j,i;G_{2}^{\circ }):= \lambda (i,j;G_{2})\).
Example 4.1
Let \(S = S_{1} + S_{2}\) be an L\(_{2}\)-convex set defined by
The graphs \(G_{1}\) and \(G_{2}\) associated with \(S_{1}\) and \(S_{2}\) are illustrated in Fig. 2, where vertex i is shown by

and
The graph \(G_{*} = G_{1} + G_{2}^{\circ }\) is also shown.

Graphs for L-convex polyhedra (Example 4.1)
We represent a directed cycle in \(G_{*}\) as a (cyclic) sequence of edges: \(C = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\), where \(e_{k} \in E_{*}\) for \(k=1,2,\ldots ,\ell \) and the head (terminal vertex) of \(e_{k}\) is the tail (initial vertex) of \(e_{k+1}\) for \(k=1,2,\ldots ,\ell \) with the convention of \(e_{\ell +k}=e_{k}\). When we speak of a cycle, we always mean a directed cycle in this paper. We denote the length of C by
A cycle C is called simple if the vertices on C are all distinct.
We call a cycle mixed if it contains edges from both \(E_{1}\) and \(E_{2}^{\circ }\). For a mixed cycle C, we define its break vertices \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) and an inequality associated with C by
which is used to formulate Theorem 4.1.
The break vertices \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) are defined as follows. Assume, without loss of generality, that a mixed cycle C is represented as \(C = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\) with \(e_{1} \in E_{1}\) and \(e_{\ell } \in E_{2}^{\circ }\), which is possible by a cyclic permutation of the edges in C. The first break vertex \(i_{1}\) is the tail of \(e_{1}\), which is also the head of \(e_{\ell }\). In general, a break vertex \(i_{r}\) is the tail of \(e_{k} \in C \cap E_{1}\) and the head of \(e_{k-1} \in C \cap E_{2}^{\circ }\) for some \(k \ (=: s_{r})\), whereas \(j_{r}\) is the head of \(e_{k'} \in C \cap E_{1}\) and the tail of \(e_{k'+1} \in C \cap E_{2}^{\circ }\) for some \(k' \ (=: t_{r})\). Including the break vertices we may represent C as
Note that \(s_{1} = 1\) and \(s_{r} \le t_{r} \le s_{r+1} -2\) for \(r=1,2,\ldots ,m\) with \(s_{m+1} = \ell + 1\), and that \(e_{k} \in E_{1}\) if \(s_{r} \le k \le t_{r}\) and \(e_{k} \in E_{2}^{\circ }\) if \(t_{r}+1 \le k \le s_{r+1}-1\). For \(r=1,2,\ldots ,m\), an interval of \(E_{1}\)-edges starts at vertex \(i_{r}\) and ends at vertex \(j_{r}\), and an interval of \(E_{2}^{\circ }\)-edges starts at vertex \(j_{r}\) and ends at vertex \(i_{r+1}\). We often refer to an interval of \(E_{1}\)-edges (resp., \(E_{2}^{\circ }\)-edges) as an \(E_{1}\)-interval (resp., \(E_{2}^{\circ }\)-interval). The index m is equal to the number of \(E_{1}\)-intervals in C, which is also equal to the number of \(E_{2}^{\circ }\)-intervals.
Example 4.2
The concepts introduced above are illustrated for \(G_{*} = G_{1} + G_{2}^{\circ }\) in Fig. 2.
-
For a simple mixed cycle \(C = (1,2)_{1} (2,3)_{2} (3,4)_{2} (4,1)_{2}\), there is a pair of break vertices \((i_{1}, j_{1})=(1,2)\). We have \(\gamma (C) = 3 + (3+2+1)=9\) and \(x_{2} - x_{1} \le 9\) in (4.4).
-
For a simple mixed cycle \(C = (1,2)_{1} (2,3)_{1} (3,4)_{2} (4,1)_{2}\), there is a pair of break vertices \((i_{1}, j_{1})=(1,3)\). We have \(\gamma (C) = (3+5) + (2+1)=11\) and \(x_{3} - x_{1} \le 11\) in (4.4).
-
For a simple mixed cycle \(C = (1,2)_{1} (2,3)_{2} (3,4)_{1} (4,1)_{2}\), the break vertices are given by \((i_{1}, j_{1})=(1,2)\) and \((i_{2}, j_{2})=(3,4)\). We have \(\gamma (C) = 3 + 3 + 8 + 1 = 15\) and \(x(\{ 2,4 \}) - x(\{ 1,3 \}) \le 15\) in (4.4).
-
For a simple mixed cycle \(C = (3,4)_{1} (4,1)_{2} (1,3)_{2}\), there is a pair of break vertices \((i_{1}, j_{1})=(3,4)\). We have \(\gamma (C) = 8 + (1+2)=11\) and \(x_{4} - x_{3} \le 11\) in (4.4).
-
A simple mixed cycle \(C = (3,4)_{1} (4,2)_{2} (2,3)_{2}\) has the same break vertices \((i_{1}, j_{1})=(3,4)\) as above and a longer length with \(\gamma (C) = 8 + (5+3)=16\). This results in \(x_{4} - x_{3} \le 16\) in (4.4), which is weaker than (implied by) \(x_{4} - x_{3} \le 11\) in the above.
-
A non-simple mixed cycle \(C = (2,3)_{1} (3,4)_{1} (4,1)_{1} (1,3)_{2} (3,4)_{2} (4,2)_{2}\) has a pair of break vertices \((i_{1}, j_{1})=(2,1)\), and \(\gamma (C) = (5+8+7) + (2+2+5) = 29\). The associated inequality \(x_{1} - x_{2} \le 29\) is implied by other inequalities in (4.4) associated with simple mixed cycles, as follows. The edge set of C is the union of two simple mixed cycles \(C^{(1)} = (2,3)_{1} (3,4)_{2} (4,2)_{2}\) and \(C^{(2)} = (3,4)_{1} (4,1)_{1} (1,3)_{2}\). The cycles \(C^{(1)}\) and \(C^{(2)}\) have break vertices \((i_{1}^{(1)}, j_{1}^{(1)})=(2,3)\) and \((i_{1}^{(2)}, j_{1}^{(2)})=(3,1)\), respectively, and give rise to
$$\begin{aligned}&x_{3} - x_{2} \le \gamma (C^{(1)}) = 5+ (2+5) = 12, \\&x_{1} - x_{3} \le \gamma (C^{(2)}) = (8+7) + 2 = 17. \end{aligned}$$These two inequalities, when added, imply the inequality \(x_{1} - x_{2} \le 29\) corresponding to the non-simple mixed cycle C. It is generally true that the inequality (4.4) for a non-simple mixed cycle is implied by other inequalities in (4.4) associated with simple mixed cycles.
Remark 4.1
In Example 4.2, we have seen a structural reason (non-simplicity) for redundancy. Another (obvious) reason for redundancy is numerical coincidence. Such numerical redundancy is likely to occur, for example, if \(\gamma ^{(1)}\) and \(\gamma ^{(2)}\) in the given descriptions in (4.1) satisfy triangle inequality. There may be other reasons that lead to redundancy in inequalities in (4.4). It is left for the future to clarify the condition for redundant inequalities.
4.2 Refined theorems
With the terminology and notation introduced in Sect. 4.1, we can state the following theorem, which is a refinement of Theorem 3.1. In (4.6) as well as in (4.7), \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) denotes the break vertices of a simple mixed cycle C in \(G_{*} = G_{1} + G_{2}^{\circ }\) and \(\gamma (C)\) is the length of C defined in (4.3).
Theorem 4.1
-
(1)
An L\(_{2}\)-convex set \(S \subseteq {\mathbb {Z}}^{n}\) represented as \(S = S_{1} + S_{2}\) with \(S_{1}\) and \(S_{2}\) being L-convex can be described as
$$\begin{aligned} S = {}&\{ x \in {\mathbb {Z}}^{n} \mid x(\{ j_{1}, \ldots , j_{m} \}) - x(\{ i_{1}, \ldots , i_{m} \}) \le \gamma (C), \nonumber \\&C: \hbox {simple mixed cycle in }G_{*} \}. \end{aligned}$$(4.6) -
(2)
An L\(_{2}\)-convex polyhedron \(P \subseteq {\mathbb {R}}^{n}\) represented as \(P = P_{1} + P_{2}\) with \(P_{1}\) and \(P_{2}\) being L-convex can be described as
$$\begin{aligned} P = {}&\{ x \in {\mathbb {R}}^{n} \mid x(\{ j_{1}, \ldots , j_{m} \}) - x(\{ i_{1}, \ldots , i_{m} \}) \le \gamma (C), \nonumber \\&C: \hbox {simple mixed cycle in }G_{*} \}. \end{aligned}$$(4.7)
Proof
Two different proofs are given in this paper. The first is a structural proof, which is a refinement of the proof (Sect. 3.3) of Theorem 3.1 and relies on more detailed versions of the conjugacy theorem and M\(_{2}\)-optimality criterion in discrete convex analysis. The second is a direct algebraic proof, which is based on Fourier–Motzkin elimination and does not use results from discrete convex analysis. The structural proof is given in Sect. 4.3 and the algebraic proof in Sect. 5.2. \(\square \)
Remark 4.2
Theorem 4.1 is a refinement of Theorem 3.1 in the following respects.
-
1.
Theorem 3.1 identified the form \(x(J) - x(I) \le \gamma _{IJ}\) of the inequalities, but the bound \(\gamma _{IJ}\) is not investigated. In contrast, Theorem 4.1 gives an expression of this \(\gamma _{IJ}\) in terms of the given data of the constituent L-convex sets (or polyhedra). In particular, triangle inequality is not assumed, which is natural and convenient in applications.
-
2.
Theorem 3.1 involves all pairs (I, J) of disjoint subsets I and J in (3.7) (or (3.8)), whereas the expression (4.6) (or (4.7)) in Theorem 4.1 refers to only those pairs (I, J) which correspond to simple mixed cycles.
Theorem 4.1 is demonstrated below for the L\(_{2}\)-convex set in Example 4.1.
Example 4.3
Recall the L\(_{2}\)-convex set \(S = S_{1} + S_{2}\) in Example 4.1, for which the associated graphs are shown in Fig. 2. In Example 4.2 we have seen typical cases of the inequality in (4.4) associated with a mixed cycle in \(G_{*}\). By inspecting all simple mixed cycles in \(G_{*}\), we arrive at the following system of inequalities to describe S:
where redundant inequalities are omitted. In Sect. 5 we show an alternative method to derive these inequalities.
Example 4.4
For the L\(_{2}\)-convex set \(S = S_{1} + S_{2}\) defined by (3.9) and (3.10) in Example 3.1, the graph \(G_{1} + G_{2}^{\circ }\) is a cycle \(( 1, 2, \ldots , m-1, m)\). There is only one simple mixed cycle C, for which \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m}) =( 1, 2, \ldots , m-1, m)\). This cycle corresponds to the inequality \((x_{1} + x_{3} + \cdots + x_{n-1}) - (x_{2} + x_{4} + \cdots + x_{n}) \le 0\) in (3.11).
By the simple relation between L\(_{2}\)-convexity and L\(^{\natural }_{2}\)-convexity (Proposition 2.2), Theorem 4.1 above can be adapted easily to an L\(^{\natural }_{2}\)-convex set (or polyhedron). Let \(S = S_{1} + S_{2}\subseteq {\mathbb {Z}}^{n}\) be an L\(^{\natural }_{2}\)-convex set, with \(S_{1}\) and \(S_{2}\) being L\(^{\natural }\)-convex. Each \(S_{k}\) is described as in Theorem 2.2 with \(\tilde{\gamma }_{ij}^{(k)}\) in (2.16). Consider a graph \(\tilde{G}_{k} =({\tilde{N}}, {\tilde{E}}_{k})\) with \({\tilde{N}} = N \cup \{ 0 \}\) and \({\tilde{E}}_{k} = \{ (i,j) \mid {\tilde{\gamma }}_{ij}^{(k)} < +\infty , \ i,j \in {\tilde{N}}, \ i \ne j \} \). Let \({\tilde{G}}_{2}^{\circ }\) be the reorientation of \({\tilde{G}}_{2}\), and let \(\tilde{G}_{*} = {\tilde{G}}_{1} + {\tilde{G}}_{2}^{\circ }\). The notion of a mixed cycle C can be defined naturally on \(\tilde{G}_{*}\), and \({\tilde{\gamma }}(C)\) will denote the length of C defined similarly to (4.3) using \(\tilde{\gamma }_{ij}^{(k)}\).
Theorem 4.2
-
(1)
An L\(^{\natural }_{2}\)-convex set \(S \subseteq {\mathbb {Z}}^{n}\) represented as \(S = S_{1} + S_{2}\) with \(S_{1}\) and \(S_{2}\) being L\(^{\natural }\)-convex can be described as
$$\begin{aligned} S = {}&\{ x \in {\mathbb {Z}}^{n} \mid {\tilde{x}} = (x,0) \in {\mathbb {Z}}^{n+1}, \ {\tilde{x}}(\{ j_{1}, \ldots , j_{m} \}) - {\tilde{x}}(\{ i_{1}, \ldots , i_{m} \}) \le {\tilde{\gamma }}(C), \nonumber \\&C: \hbox {simple mixed cycle in }{\tilde{G}}_{*} \}. \end{aligned}$$(4.9) -
(2)
An L\(^{\natural }_{2}\)-convex polyhedron \(P \subseteq {\mathbb {R}}^{n}\) represented as \(P = P_{1} + P_{2}\) with \(P_{1}\) and \(P_{2}\) being L\(^{\natural }\)-convex can be described as
$$\begin{aligned} P = {}&\{ x \in {\mathbb {R}}^{n} \mid {\tilde{x}} = (x,0) \in {\mathbb {R}}^{n+1}, \ {\tilde{x}}(\{ j_{1}, \ldots , j_{m} \}) - {\tilde{x}}(\{ i_{1}, \ldots , i_{m} \}) \le {\tilde{\gamma }}(C), \nonumber \\&C: \hbox {simple mixed cycle in }{\tilde{G}}_{*} \}. \end{aligned}$$(4.10)
Proof
This follows from Theorem 4.1 with Propositions 2.1 and 2.2. \(\square \)
4.3 Proof of Theorem 4.1 by discrete convex analysis
We give a proof of Theorem 4.1 relying on results from discrete convex analysis, which is similar in vein to the proof of Theorem 3.1 but uses detailed versions of the conjugacy theorem and M\(_{2}\)-optimality criterion. To be specific, while we used the M\(_{2}\)-optimality criterion of [18, Theorem 8.32] to prove Theorem 3.1, the proof of Theorem 4.1 here is based on another form of M\(_{2}\)-optimality criterion [18, Theorem 8.33] that is applicable when an M\(_{2}\)-convex function is represented as the sum of two M-convex functions. We shall use concepts such as M- and M\(_{2}\)-convex functions as well as L- and L\(_{2}\)-convex functions. For definitions of these concepts, the reader is referred to Appendix A.1.
4.3.1 Step 1 (using DCA structural results)
Let \(S \subseteq {\mathbb {Z}}^{n}\) be an L\(_{2}\)-convex set, represented as \(S = S_{1} + S_{2}\) with L-convex sets \(S_{1}\) and \(S_{2}\). Denote the indicator functions of S and \(S_{k}\) by g and \(g_{k}\), respectively; that is, \(g = \delta _{S}\) and \(g_{k} = \delta _{S_{k}}\) for \(k=1,2\). Since \(S_{k}\) is an L-convex set, each \(g_{k}: {\mathbb {Z}}^{n} \rightarrow \{ 0, +\infty \}\) is an L-convex function. By \(S = S_{1} + S_{2}\), the function g is equal to the (integral) infimal convolution \(g_{1} \Box g_{2}\) of \(g_{1}\) and \(g_{2}\), that is,
which shows that \(g: {\mathbb {Z}}^{n} \rightarrow \{ 0, +\infty \}\) is an L\(_{2}\)-convex function.
Let \(f_{k}\) denote the conjugate of the function \(g_{k}\), that is, \(f_{k} = g_{k}^{\bullet }\) for \(k=1,2\). By the conjugacy theorem [18, Theorem 8.12], each \(f_{k}: {\mathbb {Z}}^{n} \rightarrow {\mathbb {Z}}\cup \{ +\infty \}\) is an M-convex function, and \(g_{k} = f_{k}^{\bullet }\). In addition, \(f_{k}(\varvec{0})=0\) and \(f_{k}\) is positively homogeneous, since it is the conjugate of an indicator function.
Define \(f= f_{1} + f_{2}\), which is an M\(_{2}\)-convex function. We have
where the equality \(g_{1}^{\bullet } + g_{2}^{\bullet } = (g_{1} \Box g_{2})^{\bullet }\) is in [18, p. 229, (8.38)]. We also have
where the equality \((f_{1} + f_{2})^{\bullet }= f_{1}^{\bullet } \Box f_{2}^{\bullet }\) is due to [18, Theorem 8.36]. Thus we obtain \(f = g^{\bullet }\) and \(f^{\bullet }= g\), which allows us to use the expression \(S = \partial f(\varvec{0})\) in (3.16) with \(f=f_{1}+ f_{2}\). Therefore,
In (4.13), the functions \(f_{1}(z) - \langle p, z \rangle \) and \(f_{2}(z)\) are M-convex. For a general M\(_{2}\)-convex function \(h: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\) represented as \(h= h_{1}+h_{2}\) with M-convex functions \(h_{1}\) and \(h_{2}\), the second form of M\(_{2}\)-optimality criterion [18, Theorem 8.33] states that a vector \(z^{*} \in {\mathbb {Z}}^{n}\) with \(h(z^{*}) < +\infty \) is a minimizer of h if and only if
for any distinct \(i_{1}, j_{1}, \ldots , i_{m}, j_{m}\in N\), where \(i_{m+1}=i_{1}\) by convention.Footnote 3 The condition (4.14) for \(h_{1}(z) = f_{1}(z) - \langle p, z \rangle \), \(h_{2}(z) = f_{2}(z)\), and \(z^{*} =\varvec{0}\) reads
which is a necessary and sufficient condition for p to be in S. Therefore,
On the right-hand side of the inequality (4.15), we observe
where the first equality is due to the definition of \(f_{k}= \delta _{S_{k}}^{\bullet }\) and the last equality is a fundamental relation between the maximum potential difference and the shortest path length; see, e.g., [27, Theorem 8.3]. (Recall from Sect. 4.1 that \(\lambda (i,j;G_{k})\) denotes the minimum \(\gamma ^{(k)}\)-length of a path connecting i to j in \(G_{k}\).) With the use of (4.17) we can rewrite the right-hand side of (4.15) as
By introducing notation
and changing the variable p to x, we can rewrite the inequality in (4.15) as
and the representation of S in (4.16) as
4.3.2 Step 2 (using cycle decomposition)
The next step of the proof is to relate (4.20) to simple mixed cycles in \(G_{*} = G_{1} + G_{2}^{\circ }\). Let C be a (simple or non-simple) mixed cycle with break vertices \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\), and consider the inequality
in (4.4), where \(\gamma (C)\) denotes the length of the cycle C defined in (4.3). Using these inequalities for simple mixed cycles C, we define \({\hat{S}} \subseteq {\mathbb {Z}}^{n}\) by
We want to show that \(S = {\hat{S}}\), which is (4.6) in Theorem 4.1.
The inclusion \(S \subseteq {\hat{S}}\) is easy to see. Let \(C = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\) be a simple mixed cycle with break vertices \((i_{1}, \ldots , i_{m}, j_{1}, \ldots , j_{m})\). Since \(\lambda (i_{r},j_{r};G_{1})\) and \(\lambda (j_{r}, i_{r+1};G_{2}^{\circ })\) denote shortest path lengths, we have
which implies \(S \subseteq {\hat{S}}\).
The reverse inclusion \(S \supseteq {\hat{S}}\) can be shown as follows. Let \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) be an arbitrary tuple of distinct indices with \(\lambda ( i_{1}, j_{1}, \ldots , i_{m}, j_{m}) < +\infty \). We will show that there exists a family of simple mixed cycles such that the inequalities (4.21) for this family imply the inequality (4.19) for \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\). Then the inclusion \(S \supseteq {\hat{S}}\) follows.
Since \(\lambda ( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) is finite, it follows from the definition in (4.18) that \(\lambda (i_{r},j_{r};G_{1}) < +\infty \) and \(\lambda (j_{r},i_{r+1};G_{2}^{\circ }) < +\infty \) for \(r=1,2,\ldots , m\). Let \(L_{r}^{(1)}\) be a shortest path from \(i_{r}\) to \(j_{r}\) in \(G_{1}\) with minimum number of edges. Similarly, let \(L_{r}^{(2)}\) be a shortest path from \(j_{r}\) to \(i_{r+1}\) in \(G_{2}^{\circ }\) with minimum number of edges. We then have
The concatenation (series connection) of \(L_{1}^{(1)}, L_{1}^{(2)}, L_{2}^{(1)}, L_{2}^{(2)}, \ldots , L_{m}^{(1)}, L_{m}^{(2)}\) determines a cycle \({\tilde{C}}\) in \(G_{*}\). This cycle \({\tilde{C}}\) is not necessarily simple. (The paths \(L_{1}^{(1)}, L_{1}^{(2)}, L_{2}^{(1)}, L_{2}^{(2)}, \ldots , L_{m}^{(1)}, L_{m}^{(2)}\) may possibly have common edges, and in such a case, it will be more precise to call \({\tilde{C}}\) a closed walk, although we refer to it as a cycle.)
We can decompose \({\tilde{C}}\) into a family of simple cycles, say, \(\{ C_{q} \mid q \in K \}\). By (4.23) as well as (4.18) we have
Each cycle \(C_{q}\) is simple but may or may not be mixed. If \(C_{q}\) is mixed, we can think of an inequality (4.21) associated with \(C_{q}\), which we express as
where \(I_{q} \cup J_{q}\) (with an appropriate ordering of elements) is the break vertices of \(C_{q}\). If \(C_{q}\) is not mixed, either all edges of \(C_{q}\) belong to \(G_{1}\) or all belong to \(G_{2}^{\circ }\). Since neither \(G_{1}\) nor \(G_{2}^{\circ }\) contains negative cycles, it follows that \(\gamma (C_{q}) \ge 0\) and hence the inequality (4.25) is also true under the definition of \(I_{q} = J_{q} = \emptyset \).
A crucial observation here is the following counting relation. For \(i \in N\) and \(I \subseteq N\) we define
Lemma 4.1
For each \(i \in N\), we have
Proof
Let \(E_\mathrm{in}(i)\) and \(E_\mathrm{out}(i)\) denote the (multi)sets of the edges of \({\tilde{C}}\) that enter and leave i, respectively. First we consider the case of \(i=j_{r}\), where \(1 \le r \le m\). The last edge of \(L_{r}^{(1)}\) (\(\subseteq E_{1}\)) enters \(j_{r}\) and the first edge of \(L_{r}^{(2)}\) (\(\subseteq E_{2}^{\circ }\)) leaves \(j_{r}\). The vertex \(j_{r}\) may be contained in the middle other paths \(L_{s}^{(k)}\) with \(s \ne r\), but in this case, the two consecutive edges connected at \(j_{r}\) on \(L_{s}^{(k)}\) belong to the same class (\(E_{1}\) or \(E_{2}^{\circ }\)). Therefore, we have
Suppose that \(C_{q}\) passes through \(j_{r}\), and let \(e_\mathrm{in} \in E_\mathrm{in}(j_{r})\) and \(e_\mathrm{out} \in E_\mathrm{out}(j_{r})\) be the edges of \(C_{q}\) that enter and leave \(j_{r}\), respectively. If \(e_\mathrm{in} \in E_{1}\) and \(e_\mathrm{out} \in E_{2}^{\circ }\), then \(j_{r} \in J_{q}\) (i.e., \(\varepsilon (j_{r}, J_{q}) = 1\)). Symmetrically, if \(e_\mathrm{in} \in E_{2}^{\circ }\) and \(e_\mathrm{out} \in E_{1}\), then \(j_{r} \in I_{q}\). If \(\{ e_\mathrm{in}, e_\mathrm{out} \} \subseteq E_{1}\) or \(\{ e_\mathrm{in}, e_\mathrm{out} \} \subseteq E_{2}^{\circ }\), then \(j_{r} \notin I_{q} \cup J_{q}\). The vertex \(j_{r}\) may be contained in several \(C_{q}\), but it follows from (4.28) that \( \sum _{q \in K} \varepsilon (j_{r}, J_{q}) - \sum _{q \in K} \varepsilon (j_{r}, I_{q}) = +1\), as in (4.27). The case of \(i=i_{r}\) can be treated in a similar manner with
Also the remaining case of \(i \ne i_{r}, j_{r}\) can treated similarly using
Thus (4.27) is proved. \(\square \)
The addition of (4.25) over \(q \in K\) gives
For the left-hand side of (4.29), we have
by Lemma 4.1, while the right-hand side of (4.29) is equal to \(\lambda ( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\) by (4.24). This shows that each inequality in (4.19) can be derived from some of the inequalities in (4.21). From this we can conclude that \(S \supseteq {\hat{S}}\), completing the proof of Theorem 4.1.
Remark 4.3
The supporting function of a polyhedron \(Q \subseteq {\mathbb {R}}^{n}\) (in general) is defined for all \(u \in {\mathbb {R}}^{n}\) by
Then Q is described by a system of inequalities \(\langle u, x \rangle \le \eta (Q,u)\) with a suitable finite set of u’s. If Q is a full-dimensional bounded polyhedron, the vectors u will be the normal vectors of all facets of Q. It is known [10, Section 2.2, Exercise 8] that the supporting function of a Minkowski sum is given by the sum of the respective supporting functions:
This shows that the bounding constant \(\gamma _{IJ}\) in (3.8) for L\(_{2}\)-convex polyhedron \(P = P_{1}+P_{2}\) is given as
Let \(S = S_{1}+S_{2}\) be an L\(_{2}\)-convex set. Since \(f = \delta _{S}^{\bullet }\) is given by
the function f is nothing but the supporting function \(\eta (P,\cdot )\) of \(P=\overline{S}\) restricted to integral vectors. Similarly, \(f_{k}\) is essentially the same as the supporting function \(\eta (P_{k},\cdot )\) of \(P_{k}=\overline{S_{k}}\). Furthermore, the relation \(f= f_{1} + f_{2}\) evaluated at \(u = e^{J} - e^{I}\) corresponds to (4.30).
5 Elimination approach to L\(_{2}\)-convex sets
In this section we give an algebraic proof of Theorem 4.1 by means of the Fourier–Motzkin elimination.
5.1 Fourier–Motzkin elimination
The procedure of Fourier–Motzkin elimination [26, 31] is described here for a (general) system of inequalities
in \(u \in {\mathbb {R}}^{n}\). It is assumed that the matrix A has entries from \(\{ -1,0,+1 \}\), which is the case with our system (5.13)–(5.14) in Sect. 5.2.1. Let R denote the row set of A, that is, \(A = ( a_{ij} \mid i \in R, j \in \{ 1,2,\ldots , n \})\). The ith row vector of A is denoted by \(a_{i}\) for \(i \in R\). By assumption, we have \(a_{ij} \in \{ -1,0,+1 \}\) for all i and j.
The Fourier–Motzkin elimination for (5.1) goes as follows. According to the value of coefficient \(a_{i1}\) of the first variable \(u_{1}\), we partition R into three disjoint parts \((R_{1}^{+},R_{1}^{-},R_{1}^{0})\) as
and decompose (5.1) into three parts as
For all possible combinations of \(i \in R_{1}^{+}\) and \(k \in R_{1}^{-}\), we add the inequality for i in (5.2) and the inequality for k in (5.3) to generate
Since \(a_{i1} + a_{k1}= 0\) for all \(i \in R_{1}^{+}\) and \(k \in R_{1}^{-}\), the newly generated inequalities in (5.5) are free from the variable \(u_{1}\). We have thus eliminated \(u_{1}\) and obtained a system of inequalities in \((u_{2},\ldots ,u_{n})\) consisting of (5.4) and (5.5).
For the variable \(u_{1}\) we obtain
from (5.2) and (5.3). Once \((u_{2},\ldots ,u_{n})\) is found, \(u_{1}\) can easily be obtained from (5.6). Note that the interval described by (5.6) is nonempty as long as \((u_{2},\ldots ,u_{n})\) satisfies (5.5). It is understood that the maximum over the empty set is equal to \(-\infty \) and the minimum over the empty set is equal to \(+\infty \).
It is emphasized that the derived system of inequalities in \((u_{1}, u_{2},\ldots ,u_{n})\) consisting of (5.4), (5.5), and (5.6) is in fact equivalent to the original system consisting of (5.2), (5.3), and (5.4). In particular, \((u_{1}, u_{2},\ldots ,u_{n})\) satisfies (5.2), (5.3), and (5.4) if and only if \((u_{2},\ldots ,u_{n})\) satisfies (5.4) and (5.5), and \(u_{1}\) satisfies (5.6). In geometric terms, the projection of the polyhedron \(Q = \{ u \in {\mathbb {R}}^{n} \mid A u \le b \}\) to the space of \((u_{2},u_{3},\ldots ,u_n)\) is described by (5.4) and (5.5).
The Fourier–Motzkin method applies the above procedure recursively to eliminate variables \(u_{1},u_{2}, \ldots ,u_{n-1}\). At the stage when the variables \(u_{1},u_{2}, \ldots , u_{\ell -1}\) have been eliminated, we obtain a system of inequalities to describe the projection of Q to the space of \((u_{\ell },u_{\ell +1},\ldots , u_n)\). At the end of the process, a single inequality in \(u_{n}\) of the form (5.6) results. Then we can determine \((u_{1}, u_{2},\ldots ,u_{n})\) in the reverse order \(u_{n}, u_{n-1},\ldots ,u_{1}\).
5.2 Proof of Theorem 4.1 by Fourier–Motzkin elimination
We present the proof for an L\(_{2}\)-convex polyhedron, from which the proof for an L\(_{2}\)-convex set follows immediately (see Remark 5.1). We prefer to work with polyhedra rather than discrete sets because of the geometric flavor of the proof with an interpretation by projections.
5.2.1 Inequality systems
Let \(P = P_{1} + P_{2}\) be an L\(_{2}\)-convex polyhedron, where \(P_{1}\) and \(P_{2}\) are L-convex polyhedra. Define
Then \(P = \{ x \in {\mathbb {R}}^{n} \mid (x,y,z) \in Q \}\), which is a projection of Q. By Theorem 2.1 we have
where \(E_{1}, E_{2} \subseteq (N \times N) {\setminus }\{ (i,i) \mid i \in N \}\), \(\gamma _{ij}^{(1)} \in {\mathbb {R}}\) (finite-valued) for all \((i,j) \in E_{1}\), and \(\gamma _{ji}^{(2)} \in {\mathbb {R}}\) for all \((j,i) \in E_{2}\). Then Q is described by
We can eliminate z by substituting \(z_{i} = x_{i} - y_{i}\) into (5.12), to obtain
Let \({\hat{Q}}\) denote the set of (x, y) satisfying these inequalities, that is,
We denote by \({\hat{Q}}_{\ell }\) the projection of \({\hat{Q}}\) to the space of \((x_{1}, x_{2}, \ldots , x_{n}, y_{\ell }, y_{\ell +1}, \ldots , y_{n})\) for \(\ell =1,2,\ldots ,n+1\). We have \({\hat{Q}}_{1} = {\hat{Q}}\) and \({\hat{Q}}_{n+1} = P\). By eliminating y from (5.13) and (5.14), we can obtain the polyhedral description of P. The Fourier–Motzkin elimination procedure enables us to carry out this task.
Example 5.1
Consider the L\(_{2}\)-convex polyhedron P associated with the L\(_{2}\)-convex set in Example 4.1. The inequalities in (5.10)–(5.12) are given by
and those in (5.13) and (5.14) are given by
By eliminating \((y_{1},y_{2}, y_{3}, y_{4})\), we arrive at a system of inequalities for P, which is given by (4.8) in Example 4.3.
Remark 5.1
Theorem 4.1(1) for an L\(_{2}\)-convex set follows from the statement (2) for an L\(_{2}\)-convex polyhedron. Let \(S=S_{1} + S_{2}\), where \(S_{1}\) and \(S_{2}\) are L-convex sets, and denote their convex hulls by \(P = \overline{S}\), \(P_{1} = \overline{S_{1}}\), and \(P_{2} = \overline{S_{2}}\). Since \(\overline{S_{1}+ S_{2}} = \overline{S_{1}} + \overline{S_{2}}\) in general ([18, Proposition 3.17]), we have \(P = P_{1}+P_{2}\), where \(P_{1}\) and \(P_{2}\) are L-convex polyhedra. We have \(S = P \cap {\mathbb {Z}}^{n}\) by integral convexity of an L\(_{2}\)-convex set ([18, Theorem 8.42]), and hence (4.7) implies (4.6).
5.2.2 Polyhedral description of the projection \({\hat{Q}}_{\ell }\)
In Sect. 4.1 we have introduced an inequality
associated with a mixed cycle C with reference to its break vertices (see (4.4) and (4.5)). This inequality is used in Theorem 4.1 to describe \(P = {\hat{Q}}_{n+1}\). For the description of \({\hat{Q}}_{\ell }\) with general \(\ell \) (to be given in Proposition 5.1), we need a similar inequality associated with a path. For a path L in \(G_{*}\), we define its break vertices \(( i_{1}, j_{1}, \ldots , i_{m+1}, j_{m+1})\) (see below) and an inequality associated with L by
where i and j are the initial and terminal vertices of L and \(\gamma (L) = \sum _{e \in L} \gamma (e)\) is the length of L with respect to \(\gamma \) in (4.2). It is noted that the first and last break vertices, \(i_{1}\) and \(j_{m+1}\), do not appear in (5.17). The inequality (5.17) generalizes \(y_{j} - y_{i} \le \gamma _{ij}^{(1)}\) in (5.13) and \( y_{j} - y_{i} + x_{i} - x_{j} \le \gamma _{ji}^{(2)}\) in (5.14) (see Example 5.2).
For a (simple or non-simple) path \(L = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\) from i to j \((\ne i)\) in \(G_{*}\), the break vertices \(( i_{1}, j_{1}, \ldots , i_{m+1}, j_{m+1})\) of L are defined as follows. The index m is equal to the number of \(E_{2}^{\circ }\)-intervals in L; in particular, \(m=0\) if L has no edge from \(E_{2}^{\circ }\). We define \(i_{1}:= i\) and \(j_{m+1}:= j\). Suppose that L has edges from \(E_{2}^{\circ }\), that is, \(m \ge 1\). Let \(j_{1}\) be the vertex at which the first \(E_{2}^{\circ }\)-interval starts; we have \(j_{1}=i_{1}\) if the first edge \(e_{1}\) belongs to \(E_{2}^{\circ }\). For each \(r=1,2,\ldots ,m\), the r-th \(E_{2}^{\circ }\)-interval starts at vertex \(j_{r}\) and ends at vertex \(i_{r+1}\):
If \(e_{1} \in E_{2}^{\circ }\), the first interval \(e_{1} \cdots e_{t_{1}}\) of \(E_{1}\)-edges is empty, in which case we have \(t_{1}=0\). Symmetrically, if \(e_{\ell } \in E_{2}^{\circ }\), the last interval \(e_{s_{m+1}} \cdots e_{\ell }\) of \(E_{1}\)-edges is empty, in which case we have \(s_{m+1}=\ell + 1\). With this convention we have \(0 \le t_{1}\), \(s_{r} \le t_{r}\) \((r=2,3,\ldots ,m)\), \(s_{m+1} \le \ell +1\) for \(E_{1}\)-intervals, and \(t_{r} +1 \le s_{r+1} -1\) \((r=1,2,\ldots ,m)\) for \(E_{2}^{\circ }\)-intervals.
The inequality (5.17) for a path L is illustrated in the following example, whereas the inequality (5.16) for a mixed cycle C has been illustrated in Example 4.2.
Example 5.2
The inequality (5.17) for a path L is illustrated for some cases,
-
If L consists of a single edge \((i,j)_{1} \in E_{1}\), then \(m=0\), \((i_{1}, j_{1})=(i,j)\), and the inequality (5.17) reduces to \(y_{j} - y_{i} \le \gamma _{ij}^{(1)}\) in (5.13).
-
If L is a single edge \((i,j)_{2}\) from \(E_{2}^{\circ }\), then \(m=1\), \((i_{1}, j_{1})=(i,i)\), \((i_{2}, j_{2})=(j,j)\), and (5.17) reduces to \( y_{j} - y_{i} + x_{i} - x_{j} \le \gamma _{ji}^{(2)}\) in (5.14).
-
For a simple path \(L = (i,1)_{2} (1,2)_{1} (2,j)_{2}\) with \(m=2\), \((i_{1}, j_{1})=(i,i)\), \((i_{2}, j_{2})=(1,2)\), and \((i_{3}, j_{3})=(j,j)\), the inequality (5.17) is given by
$$\begin{aligned} y_{j} - y_{i} + x_{i} + x_{2} - x_{1} - x_{j} \le \gamma _{1i}^{(2)} + \gamma _{12}^{(1)} + \gamma _{j2}^{(2)}. \end{aligned}$$ -
For a simple path \(L = (i,1)_{1} (1,2)_{2} (2,3)_{1} (3,j)_{2}\) with \(m=2\), \((i_{1}, j_{1})=(i,1)\), \((i_{2}, j_{2})=(2,3)\), and \((i_{3}, j_{3})=(j,j)\), the inequality (5.17) is given by
$$\begin{aligned} y_{j} - y_{i} + x_{1} + x_{3} - x_{2} - x_{j} \le \gamma _{i1}^{(1)} + \gamma _{21}^{(2)} + \gamma _{23}^{(1)} + \gamma _{j3}^{(2)}. \end{aligned}$$ -
For a non-simple path \(L = (i,1)_{1} (1,2)_{2} (2,1)_{1} (1,j)_{2}\) with \(m=2\), \((i_{1}, j_{1})=(i,1)\), \((i_{2}, j_{2})=(2,1)\), and \((i_{3}, j_{3})=(j,j)\), the inequality (5.17) is given by
$$\begin{aligned} y_{j} - y_{i} + 2 x_{1} - x_{2} - x_{j} \le \gamma _{i1}^{(1)} + \gamma _{21}^{(2)} + \gamma _{21}^{(1)} + \gamma _{j1}^{(2)}, \end{aligned}$$(5.19)in which \(x_{1}\) appears with coefficient 2.
Recall notations \({\hat{Q}}\) in (5.15) and its projection \({\hat{Q}}_{\ell }\) to the space of \((x,y_{[\ell ]}) \in {\mathbb {R}}^{2n - \ell +1}\), where \(y_{[\ell ]}:= (y_{\ell }, y_{\ell +1}, \ldots , y_{n})\). The following proposition states that each \({\hat{Q}}_{\ell }\) can be described by (5.16) for a suitably chosen family \(\mathcal {C}_{\ell }\) of simple mixed cycles in \(G_{*}\) and (5.17) for a suitably chosen family \(\mathcal {P}_{\ell }\) of simple paths in \(G_{*}\) connecting \(i \in N_{\ell }\) to \(j \in N_{\ell }\), where \(N_{\ell }:= \{ \ell , \ell +1, \ldots , n \}\).
Proposition 5.1
Let \(1 \le \ell \le n+1\). We have
for a family \(\mathcal {C}_{\ell }\) of simple mixed cycles in \(G_{*}\) and a family \(\mathcal {P}_{\ell }\) of simple paths in \(G_{*}\) from a vertex in \(N_{\ell }\) to another vertex in \(N_{\ell }\).
In Sect. 5.2.4 we prove Proposition 5.1 by induction on \(\ell \) on the basis of the Fourier–Motzkin elimination. The expression (5.20) for \(\ell = 1\) is true with the choice of \(\mathcal {C}_{1} =\emptyset \) and \(\mathcal {P}_{1} =E_{1} \cup E_{2}^{\circ }\), because \({\hat{Q}}_{1} = {\hat{Q}}\) is described by (5.13) and (5.14), which are special cases of (5.17) as explained in Example 5.2. The expression (5.20) for \(\ell = n+1\) implies the expression (4.7) in Theorem 4.1, since \({\hat{Q}}_{n+1} = P\) and \(\mathcal {P}_{n+1} = \emptyset \) (by \(N_{n+1} = \emptyset \)). Before describing the general induction step, we illustrate in Sect. 5.2.3 the first step to eliminate \(y_{1}\).
Remark 5.2
The definition of break vertices for a path in (5.18) is consistent with that for a mixed cycle in (4.5). A mixed cycle \(C = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\) with \(e_{1} \in E_{1}\) and \(e_{\ell } \in E_{2}^{\circ }\) may be identified with a path \(L = e_{1} e_{2} \cdots e_{\ell -1} e_{\ell }\) from i to j, where i is the tail of \(e_{1}\) and j is a copy of i. If \(( i_{1}, j_{1}, \ldots , i_{m+1}, j_{m+1})\) denotes the break vertices of L, the break vertices of C are given by \(( i_{1}, j_{1}, \ldots , i_{m}, j_{m})\). Moreover, the inequality (5.16) for C coincides (formally) with (5.17) for L with the understanding of \(y_{j}=y_{i}\) and \(i_{m+1} = j = i = i_{1}\).
5.2.3 Eliminating \(y_{1}\)
Our proof of Proposition 5.1 is based on the Fourier–Motzkin elimination applied to (5.13)–(5.14). In this section we describe the first step to eliminate \(y_{1}\).
To eliminate \(y_{1}\) we classify the inequalities into six groups as
Note that \(y_{1}\) appears with coefficient “\(+1\)” in (5.21) and (5.24), and with coefficient “\(-1\)” in (5.22) and (5.25), while \(y_{1}\) does not appear in (5.23) and (5.26). Thus there are four types of combinations to eliminate \(y_{1}\), namely, (5.21) \(+\) (5.22), (5.24) \(+\) (5.25), (5.21) \(+\) (5.25), and (5.24) \(+\) (5.22).
-
(5.21) \(+\) (5.22): This combination gives rise to
$$\begin{aligned} y_{j} - y_{i} \le \gamma _{i1}^{(1)} + \gamma _{1j}^{(1)}. \end{aligned}$$This inequality coincides with (5.17) for \(L = (i,1)_{1} (1,j)_{1}\), for which \(m=0\) and \((i_{1}, j_{1})=(i,j)\).
-
(5.24) \(+\) (5.25): This combination gives rise to
$$\begin{aligned} y_{j} - y_{i} + x_{i} - x_{j} \le \gamma _{j1}^{(2)} + \gamma _{1i}^{(2)}. \end{aligned}$$This inequality coincides with (5.17) for \(L = (i,1)_{2} (1,j)_{2}\), for which \(m=1\) and \((i_{1}, j_{1})=(i,i)\) and \((i_{2}, j_{2})=(j,j)\).
-
(5.21) \(+\) (5.25): The addition of (5.24) and (5.22) generates
$$\begin{aligned} y_{j} - y_{i} + x_{1} - x_{j} \le \gamma _{i1}^{(1)} + \gamma _{j1}^{(2)}. \end{aligned}$$If \(i \ne j\), this inequality coincides with (5.17) for \(L = (i,1)_{1} (1,j)_{2}\), for which \(m=1\) and \((i_{1}, j_{1})=(i,1)\) and \((i_{2}, j_{2})=(j,j)\). If \(i=j\), the above inequality reduces to
$$\begin{aligned} x_{1} - x_{i} \le \gamma _{i1}^{(1)} + \gamma _{i1}^{(2)}, \end{aligned}$$which coincides with (5.16) for \(C = (i,1)_{1} (1,i)_{2}\), for which \(m=1\) and \((i_{1}, j_{1})=(i,1)\).
-
(5.24) \(+\) (5.22): The addition of (5.24) and (5.22) generates
$$\begin{aligned} y_{j} - y_{i} + x_{i} - x_{1} \le \gamma _{1j}^{(1)} + \gamma _{1i}^{(2)}. \end{aligned}$$If \(i \ne j\), this inequality coincides with (5.17) for \(L = (i,1)_{2} (1,j)_{1}\), for which \(m=1\) and \((i_{1}, j_{1})=(i,i)\) and \((i_{2}, j_{2})=(1,j)\). If \(i=j\), the above inequality reduces to
$$\begin{aligned} x_{i} - x_{1} \le \gamma _{1i}^{(1)} + \gamma _{1i}^{(2)}, \end{aligned}$$which coincides with (5.16) for \(C = (i,1)_{2} (1,i)_{1}= (1,i)_{1}(i,1)_{2}\), for which \(m=1\) and \((i_{1}, j_{1})=(1,i)\).
Thus the system of inequalities for \((y_{2}, y_{3}, \ldots , y_{n}; \,x_{1}, x_{2}, \ldots , x_{n})\) is given by (5.23), (5.26), and the inequalities derived above. The interval of \(y_{1}\) is given by (5.6) as
although this expression plays no role in the proof of Proposition 5.1.
5.2.4 Proof of Proposition 5.1
We prove (5.20) in Proposition 5.1 by induction on \(\ell =1,2,\ldots ,n+1\). As already mentioned right after Proposition 5.1, the expression (5.20) for \(\ell = 1\) is true with the choice of \(\mathcal {C}_{1} =\emptyset \) and \(\mathcal {P}_{1} =E_{1} \cup E_{2}^{\circ }\).
As the induction hypothesis, suppose that (5.20) is true for \(\ell \), where \(1 \le \ell \le n\). That is, we assume that we have \((\mathcal {C}_{\ell }, \mathcal {P}_{\ell })\) such that \({\hat{Q}}_{\ell }\) is described by (5.16) for \(C \in \mathcal {C}_{\ell }\) and (5.17) for \(L \in \mathcal {P}_{\ell }\). Since \({\hat{Q}}_{\ell +1}\) is the projection of \({\hat{Q}}_{\ell }\) along the coordinate axis of \(y_{\ell }\), we can obtain an inequality system for \({\hat{Q}}_{\ell +1}\) by eliminating the variable \(y_{\ell }\) from the inequalities in (5.17) for \(L \in \mathcal {P}_{\ell }\). It is noted that the inequalities in (5.16) for \(C \in \mathcal {C}_{\ell }\), being free from \(y_{\ell }\), are not involved in the elimination process.
Let \(\mathcal {P}_{\ell }^{+}\) denote the set of paths in \(\mathcal {P}_{\ell }\) ending at vertex \(\ell \) and, similarly, let \(\mathcal {P}_{\ell }^{-}\) be the set of paths in \(\mathcal {P}_{\ell }\) starting at vertex \(\ell \). For \(L^{+} \in \mathcal {P}_{\ell }^{+}\) and \(L^{-} \in \mathcal {P}_{\ell }^{-}\), express the corresponding inequalities as
where i \((\ne \ell )\) is the starting vertex of \(L^{+}\), j \((\ne \ell )\) is the end vertex of \(L^{-}\), and \((I^{+}, J^{+})\) and \((I^{-}, J^{-})\) are determined from the break vertices of \(L^{+}\) and \(L^{-}\), respectively. The operation of the Fourier–Motzkin elimination is equivalent to adding (5.27) and (5.28), resulting in
Then we obtain the following description of \({\hat{Q}}_{\ell +1}\):
Remark 5.3
Here is a remark to motivate our subsequent argument. The inequality (5.29) for a pair \((L^{+}, L^{-}) \in \mathcal {P}_{\ell }^{+} \times \mathcal {P}_{\ell }^{-}\) corresponds to (5.5) in the general framework of the Fourier–Motzkin elimination. As such, the inequality (5.29) is legitimate to describe \({\hat{Q}}_{\ell +1}\), but it may contain coefficients of \(\pm 2\). More specifically, a coefficient of 2 appears if \((J^{+} \cap J^{-}){\setminus }(I^{+} \cup I^{-}) \ne \emptyset \). In contrast, the coefficients must be taken from \(\{ -1,0,+1 \}\) in (5.20). In the following we are going to find a family of inequalities of admissible forms that implies (5.29). This family of inequalities are used to update \((\mathcal {C}_{\ell }, \mathcal {P}_{\ell })\) to \((\mathcal {C}_{\ell +1}, \mathcal {P}_{\ell +1})\).
Consider the concatenation (series connection) of \(L^{+}\) and \(L^{-}\), which is a path \({\tilde{L}}\) from i to j if \(i \ne j\) or a cycle \({\tilde{C}}\) if \(i=j\). (The paths \(L^{+}\) and \(L^{-}\) may possibly have common edges, and in such a case, it will be more precise to call \({\tilde{L}}\) a walk, although we refer to it as a path.) For the sake of description, we assume that we have a path \({\tilde{L}}\) with break vertices \(( i_{1}, j_{1}, \ldots , i_{m+1}, j_{m+1})\), while the other case of a cycle can be treated in a similar manner. This path is not necessarily simple. In particular, there is a possibility of \((I^{+} \cup J^{+}) \cap (I^{-} \cup J^{-}) \ne \emptyset \). If \(I^{+} \cap I^{-} \ne \emptyset \) or \(J^{+} \cap J^{-} \ne \emptyset \), the associated inequality (5.17) contains coefficients other than \(\{ -1,0,+1 \}\) (see (5.19) for an example).
We can decompose the path \({\tilde{L}}\) from i to j into a union of a simple path \(L_{0}\) from i to j and a family of simple cycles, say, \(\{ C_{q} \mid q \in K \}\), where K can be empty. We have
For the simple path \(L_{0}\) we can consider an inequality in (5.17), which we denote as
where \(I_{0} \cup J_{0}\) is determined from the break vertices of \(L_{0}\). Each cycle \(C_{q}\) is simple but may or may not be mixed. If \(C_{q}\) is mixed, we can consider an inequality of the form of (5.16) associated with \(C_{q}\), which we express as
where \(I_{q} \cup J_{q}\) is the break vertices of \(C_{q}\). Denote the mixed cycles among \(\{ C_{q} \mid q \in K \}\) by \(\{ C_{q} \mid q \in K_{*} \}\), where \(K_{*} \subseteq K\). Then we have an inequality (5.33) for each \(q \in K_{*}\).
We observe a simple counting relation using the notation \(\varepsilon (\cdot , \cdot )\) in (4.26).
Lemma 5.1
For each \(h \in N\), we have
Proof
Let \(h \in N\). The left-hand side of (5.34) is equal to \(+2\) if \(h \in J^{+} \cap J^{-}\), and it is equal to 0 if \(h \in J^{+} \cap I^{-}\), etc.:
Next we consider the right-hand side of (5.34). Let \(e_\mathrm{in}^{+}\) and \(e_\mathrm{out}^{+}\) be the edges of \(L^{+}\), if any, that enter and leave vertex h, respectively. Define \(e_\mathrm{in}^{-}\) and \(e_\mathrm{out}^{-}\) similarly for \(L^{-}\).
-
If \(h \in J^{+} \cap J^{-}\), then \(\{ e_\mathrm{in}^{+}, e_\mathrm{in}^{-} \} \subseteq E_{1}\) and \(\{ e_\mathrm{out}^{+}, e_\mathrm{out}^{-} \} \subseteq E_{2}^{\circ }\), and there exist precisely two q’s such that \(h \in J_{q}\). Hence the right-hand side of (5.34) is equal to \(+2\).
-
If \(h \in J^{+} \cap I^{-}\), then \(\{ e_\mathrm{in}^{+}, e_\mathrm{out}^{-} \} \subseteq E_{1}\) and \(\{ e_\mathrm{in}^{-}, e_\mathrm{out}^{+} \} \subseteq E_{2}^{\circ }\). Two cases can be distinguished. In the first case, there are distinct \(q'\) and \(q''\) such that \(h \in J_{q'}\) and \(h \in I_{q''}\). In the second case, h is not contained in any of \(I_{q} \cup J_{q}\), which occurs when \(\{ e_\mathrm{in}^{+}, e_\mathrm{out}^{-} \}\) is used by some \(C_{q'}\) (or \(L_{0}\)) and \(\{ e_\mathrm{in}^{-}, e_\mathrm{out}^{+} \}\) is used by another \(C_{q''}\) (or \(L_{0}\)). In either case, the right-hand side of (5.34) is equal to 0.
-
If \(h \notin I^{+} \cup J^{+}\) and \(h \notin I^{-} \cup J^{-}\), then \(\{ e_\mathrm{in}^{+}, e_\mathrm{out}^{+} \}\) is contained in \(E_{1}\) or \(E_{2}^{\circ }\), and similarly, \(\{ e_\mathrm{in}^{-}, e_\mathrm{out}^{-} \}\) is contained in \(E_{1}\) or \(E_{2}^{\circ }\). Suppose, for example, that \(\{ e_\mathrm{in}^{+}, e_\mathrm{out}^{+} \} \subseteq E_{1}\) and \(\{ e_\mathrm{in}^{-}, e_\mathrm{out}^{-} \} \subseteq E_{2}^{\circ }\). Two cases can be distinguished: There are distinct \(q'\) and \(q''\) such that \(h \in J_{q'}\) and \(h \in I_{q''}\), or else h is not contained in any of \(I_{q} \cup J_{q}\). In either case, the right-hand side of (5.34) is equal to 0.
Similar arguments for other cases show that the right-hand side of (5.34) coincides with the left-hand side of (5.34). \(\square \)
Lemma 5.2
Inequality (5.29) is implied by (5.32) for \(L_{0}\) and (5.33) for \(C_{q}\) for all \(q \in K_{*}\).
Proof
Note first that \(\gamma (C_{q}) \ge 0\) if \(C_{q}\) is not mixed, since neither \(G_{1}\) nor \(G_{2}^{\circ }\) contains negative cycles. Then it follows from (5.31) that
By adding (5.32) and (5.33) for \(q \in K_{*}\) and using (5.35), we obtain
This implies (5.29), since
by Lemma 5.1. \(\square \)
For each pair \((L^{+}, L^{-}) \in \mathcal {P}_{\ell }^{+} \times \mathcal {P}_{\ell }^{-}\), we obtain a family \(\mathcal {C}^{(L^{+}, L^{-})}:= \{ C_{q} \mid q \in K_{*} \}\) of simple mixed cycles, and also \(\mathcal {P}^{(L^{+}, L^{-})}:= \{ L_{0} \}\), where \(\mathcal {P}^{(L^{+}, L^{-})}\) is defined to be an empty set if the concatenation of \(L^{+}\) and \(L^{-}\) forms a cycle. With the use of \(\mathcal {C}^{(L^{+}, L^{-})}\) and \(\mathcal {P}^{(L^{+}, L^{-})}\), we can rephrase Lemma 5.2 more precisely as follows: The inequality (5.29) generated by the elimination operation for a pair of inequalities indexed by \((L^{+}, L^{-}) \in \mathcal {P}_{\ell }^{+} \times \mathcal {P}_{\ell }^{-}\) is implied by (5.32) for \(\mathcal {P}^{(L^{+}, L^{-})}\) and (5.33) for \(\mathcal {C}^{(L^{+}, L^{-})}\). On the basis of this observation, we modify \((\mathcal {C}_{\ell }, \mathcal {P}_{\ell })\) to \((\mathcal {C}_{\ell +1}, \mathcal {P}_{\ell +1})\) as
Then we obtain
Finally, we observe that the reverse inclusion (\(\subseteq \)) is obviously true. Indeed, the addition of the inequalities in (5.13) and (5.14) along \(C \in \mathcal {C}_{\ell +1}\) (resp., \(L \in \mathcal {P}_{\ell +1}\)) results in (5.16) for C (resp., (5.17) for L). This means that these inequalities are satisfied by every element of \({\hat{Q}}_{\ell +1}\), implying the reverse inclusion (\(\subseteq \)).
Thus we have completed the proof of Proposition 5.1 by induction on \(\ell \), which in turn establishes Theorem 4.1.
5.3 Box-total dual integrality of L\(_{2}\)-convex polyhedra
To state our result we need to define the concepts of (box-)total dual integrality introduced by Edmonds and Giles [6].
A linear inequality system \(Ax \le b\) is said to be totally dual integral (TDI) if the entries of A and b are rational numbers and the minimum in the linear programming duality equation
has an integral optimal solution y for every integral vector c such that the minimum is finite. A linear inequality system \(Ax \le b\) is said to be box-totally dual integral (box-TDI) if the system \([ Ax \le b, d \le x\le c ]\) is TDI for each choice of rational (finite-valued) vectors c and d. It is known [27, Theorem 5.35] that the system \(A x \le b\) is box-TDI if the matrix A is totally unimodular. A polyhedron is called a box-TDI polyhedron if it can be described by a box-TDI system. See [3,4,5, 26, 27] for more about box-total dual integrality.
We are now ready to state our result.
Theorem 5.1
An L\(_{2}\)-convex polyhedron is box-TDI. More generally, an L\(^{\natural }_{2}\)-convex polyhedron is box-TDI.
Proof
We first consider an L\(_{2}\)-convex polyhedron P. Recall from Sect. 5.2.1 that an L\(_{2}\)-convex polyhedron P is obtained from the polyhedron Q of (5.7), which is described by the system consisting of (5.10), (5.11), and (5.12). This system can be written as
where each I is the identity matrix of order n and, for \(k=1,2\), \(B_{k}\) is a matrix whose rows are \(e^{j} - e^{i}\) for \((i,j) \in E_{k}\). Each \(B_{k}\) is totally unimodular.Footnote 4 Therefore, the matrix \(A=\) \(\left[ \begin{array}{ccc} -I &{} I &{} I \\ I &{} -I &{} -I \\ O &{} B_1 &{} O \\ O &{} O &{} B_2 \\ \end{array} \right] \) is also totally unimodular, which implies that the system (5.38) is box-TDI, and hence the polyhedron Q described by (5.38) is box-TDI. Since the projection of a box-TDI polyhedron on a coordinate hyperplane is box-TDI ([5, Theorem 3.4], [26, pp. 323–324]), the polyhedron P is also box-TDI. Thus every L\(_{2}\)-convex polyhedron is box-TDI. By Proposition 2.2(2), this implies further that every L\(^{\natural }_{2}\)-convex polyhedron is box-TDI; see [26, p. 323]. \(\square \)
Theorem 5.1 enables us to apply the results of Frank and Murota [7] for separable convex minimization on a box-TDI set. By so doing we can obtain min-max formulas for separable convex minimization on an L\(^{\natural }_{2}\)-convex set.
Remark 5.4
Here is a supplementary remark about Theorem 5.1. It is known ([26, p. 323], [4, Theorem 2.5]) that box-total dual integrality is maintained under Fourier–Motzkin elimination if the coefficients belong to \(\{ -1,0,+1 \}\). This is the case with our system (5.13)–(5.14). However, we have discarded redundant inequalities in the course of the elimination process, whereas redundant inequalities are often necessary for a system of inequalities to be box-TDI. In view of this, box-total dual integrality of the system (4.7) does not seem to follow from our argument, although it is likely that the system (4.7) is, in fact, box-TDI.
We note in passing that the intersection of an L\(^{\natural }_{2}\)-convex polyhedron with a box is not necessarily an L\(^{\natural }_{2}\)-convex polyhedron, although it remains to be an integral polyhedron by Theorem 5.1. An example is given below.
Example 5.3
Recall the L\(^{\natural }_{2}\)-convex set \( S = \{ (0,0,0), (1,1,0), (0,1,1), (1,2,1) \}\) in Example 3.2, and let \(B = \{ 0, 1 \}^{3}\) be the unit box of integers. Then \(S \cap B = \{ (0,0,0), (1,1,0), (0,1,1) \}\) is not an L\(^{\natural }_{2}\)-convex set, since \(S \cap B\) itself is not L\(^{\natural }\)-convex, and the decomposition \(S \cap B =S'_{1} + S'_{2}\) with \(S'_{1}, S'_{2} \subseteq {\mathbb {Z}}^{3}\) is possible only if \(S'_{i} = S \cap B\) and \(S'_{j} = \{ (0,0,0) \}\) for \(i \ne j\). A similar statement applies to the polyhedral version. Indeed, the convex hull \(\overline{S}\) of S is an L\(^{\natural }_{2}\)-convex polyhedron, and \(\overline{S} \cap \overline{B}\) \((=\overline{S \cap B})\) is not an L\(^{\natural }_{2}\)-convex polyhedron.
6 Implications
In this section we show alternative proofs to some fundamental facts on discrete convexity by using the results of this paper on polyhedral descriptions of L\(_{2}\)- and L\(^{\natural }_{2}\)-convexity. In general terms, we can distinguish between “inner” descriptions and “outer” descriptions of combinatorial objects. For example, a matroid can be defined by an exchange axiom as well as a submodular (rank) function, where the former is an inner description and latter an outer description. Such a dual view often affords a deeper understanding, which is the general recognition behind this section. The alternative proofs given here are of outer-type, while the existing proofs are of inner-type. We use Theorems 3.1 and 3.2, and not their refined versions in Theorems 4.1 and 4.2.
6.1 L\(_{2}\)-convexity and L\(^{\natural }\)-convexity
It is pointed out recently in [15] that a polyhedron P (or a set S of integer vectors) is L-convex if and only if it is both L\(_{2}\)-convex and L\(^{\natural }\)-convex. Here we show an alternative polyhedral proof, based on Theorem 3.1, when the polyhedron is full-dimensional. It is mentioned, however, that Proposition 6.1 itself is an easy fact, which can be proved in any way, but the given proof will serve as a prototype of the polyhedral argument.
Proposition 6.1
[15]
-
(1)
A polyhedron P \((\subseteq {\mathbb {R}}^{n})\) is L-convex if and only if it is both L\(_{2}\)-convex and L\(^{\natural }\)-convex.
-
(2)
A set S \((\subseteq {\mathbb {Z}}^{n})\) is L-convex if and only if it is both L\(_{2}\)-convex and L\(^{\natural }\)-convex.
Proof
(Full-dimensional case) First note that (2) follows from (1) applied to the convex hull of S, and that the only-if-part of (1) is obvious. In the following, we prove the if-part of (1), that is, if a polyhedron P is both L\(_{2}\)-convex and L\(^{\natural }\)-convex, then P is L-convex. Let F be any facet of P and \(\nu \) a normal vector of F. Since P is L\(_{2}\)-convex, we have \(\nu = c( e^{I} - e^{J}) \) for some \(c \ne 0\) and disjoint \(I, J \subseteq N\) with \(|I|=|J|\) by Theorem 3.1 (see also Remark 3.1 in Sect. 3.2). On the other hand, since P is L\(^{\natural }\)-convex, we have \(\nu = c (e^{i} - e^{j})\) or \(\nu = c e^{i}\) for some \(c \ne 0\) and \(i \ne j\) by Theorem 2.2. Then it follows that \(\nu = c (e^{i} - e^{j})\) for some \(c \ne 0\) and \(i \ne j\). Therefore, P is L-convex by Theorem 2.1. \(\square \)
6.2 L\(^{\natural }_{2}\)-convexity and multimodularity
It is proved recently in [15] that a polyhedron P (or a set S of integer vectors) is a box if and only if it is both L\(^{\natural }_{2}\)-convex and multimodular (see Appendix A.2 for the definition of multimodular sets). Here we show an alternative polyhedral proof, based on Theorem 3.2, when the polyhedron is full-dimensional.
Proposition 6.2
[15]
-
(1)
A polyhedron P \((\subseteq {\mathbb {R}}^{n})\) is a box of reals if and only if it is both L\(^{\natural }_{2}\)-convex and multimodular.
-
(2)
A set S \((\subseteq {\mathbb {Z}}^{n})\) is a box of integers if and only if it is both L\(^{\natural }_{2}\)-convex and multimodular.
Proof
(Full-dimensional case) First note that (2) follows from (1) applied to the convex hull of S, and that the only-if-part of (1) is obvious (cf., [14, Proposition 2]). We prove the if-part of (1) when P is full-dimensional. Let F be any facet of P and \(\nu \) a normal vector of F. Since P is L\(^{\natural }_{2}\)-convex, we have \(\nu = c( e^{I} - e^{J}) \) for some \(c \ne 0\) and disjoint \(I, J \subseteq N\) with \(|I|-|J| \in \{ -1,0,1 \}\) by Theorem 3.2. On the other hand, since P is multimodular, we have \(\nu = c e^{I}\) for some \(c \ne 0\) and consecutive index set \(I \subseteq N\) by Theorem A.1. Then it follows that \(\nu = c e^{i}\) for some \(c \ne 0\) and \(i \in N\). Therefore, P is a box. \(\square \)
6.3 L\(^{\natural }_{2}\)-convexity and M\(^{\natural }_{2}\)-convexity
A nonempty set S \(\subseteq {\mathbb {Z}}^{n}\) is called M\(^{\natural }_{2}\)-convex if it can be represented as the intersection of two M\(^{\natural }\)-convex sets. Similarly, a polyhedron P \(\subseteq {\mathbb {R}}^{n}\) is called M\(^{\natural }_{2}\)-convex if it is the intersection of two M\(^{\natural }\)-convex polyhedra. See Remark 6.1 below for the definitions of M\(^{\natural }\)-convex sets and polyhedra.
It is known [23, Lemma 5.7] that a set S \((\subseteq {\mathbb {Z}}^{n})\) is a box of integers if and only if it is both L\(^{\natural }_{2}\)-convex and M\(^{\natural }_{2}\)-convex, and an analogous statement is true for the polyhedral case. Here we show an alternative polyhedral proof, based on Theorem 3.2, when the polyhedron is full-dimensional.
Proposition 6.3
([23, Lemma 5.7])
-
(1)
A polyhedron P \((\subseteq {\mathbb {R}}^{n})\) is a box of reals if and only if it is both L\(^{\natural }_{2}\)-convex and M\(^{\natural }_{2}\)-convex.
-
(2)
A set S \((\subseteq {\mathbb {Z}}^{n})\) is a box of integers if and only if it is both L\(^{\natural }_{2}\)-convex and M\(^{\natural }_{2}\)-convex.
Proof
(Full-dimensional case) First note that (2) follows from (1) applied to the convex hull of S, and that the only-if-part of (1) is obvious. We prove the if-part of (1) when P is full-dimensional. Let F be any facet of P and \(\nu \) a normal vector of F. Since P is L\(^{\natural }_{2}\)-convex, we have \(\nu = c( e^{I} - e^{J}) \) for some \(c \ne 0\) and disjoint \(I, J \subseteq N\) with \(|I|-|J| \in \{ -1,0,1 \}\) by Theorem 3.2. On the other hand, since P is M\(^{\natural }_{2}\)-convex, we have \(\nu = c e^{I}\) for some \(c \ne 0\) and \(I \subseteq N\) (see Remark 6.1 below). Then it follows that \(\nu = c e^{i}\) for some \(c \ne 0\) and \(i \in N\). Therefore, P is a box. \(\square \)
Remark 6.1
An M\(^{\natural }\)-convex polyhedron is a synonym of a generalized polymatroid (g-polymatroid), which is described as \(\{ x \mid \mu (I)\le x(I) \le \rho (I) \ (I \subseteq N) \}\) with a strong pair of supermodular \(\mu \) and submodular \(\rho \) (see [9, Section 3.5(a)], [18, Section 4.8]). If \(\mu \) and \(\rho \) are integer-valued, the corresponding g-polymatroid is an integral polyhedron, and the set of its integer points is called an M\(^{\natural }\)-convex set. The intersection of two M\(^{\natural }\)-convex sets (resp., polyhedra) is called an M\(^{\natural }_{2}\)-convex set (resp., polyhedron). Hence an M\(^{\natural }_{2}\)-convex set (resp., polyhedron) is described by a system of inequalities of the form \(\max \{ \mu _{1}(I), \mu _{2}(I) \} \le x(I) \le \min \{ \rho _{1}(I), \rho _{2}(I) \}\), from which follows that a normal vector \(\nu \) is of the form of \(\nu = c e^{I}\) for some \(c \ne 0\) and \(I \subseteq N\). The reader is referred to [18, Section 4.7] for more about M\(^{\natural }\)-convex sets.
Remark 6.2
To be precise, [23, Lemma 5.7] does not deal with the polyhedral case stated in (1) of Proposition 6.3. However, the proof there can be extended almost literally to the polyhedral case. For completeness, we show the proof adapted to the polyhedral case. That is, we prove here that, if a polyhedron P is both L\(^{\natural }_{2}\)-convex and M\(^{\natural }_{2}\)-convex, then P is a box of reals. Let \(P_1, P_2 \subseteq {\mathbb {R}}^{n}\) be L\(^{\natural }\)-convex polyhedra such that \(P = P_1 + P_2\), and let \(Q_1, Q_2 \subseteq {\mathbb {R}}^{n}\) be M\(^{\natural }\)-convex polyhedra (g-polymatroids) such that \(P = Q_1 \cap Q_2\).
First we explain the idea of the proof when P is bounded. Each \(P_{k}\) has the unique minimum element \(a^k \in P_{k}\) and the unique maximum element \(b^k \in P_{k}\). Then \(a = a^1 + a^2\) is the unique minimum of P and \(b = b^1 + b^2\) is the unique maximum of P, for which we have \(P \subseteq [a, b]_{{\mathbb {R}}}\). Since \(a, b \in P = Q_1 \cap Q_2\), we have \(a, b \in Q_{k}\) for \(k=1,2\), where \(a \le b\). This implies \([a, b]_{{\mathbb {R}}} \subseteq Q_{k}\), as is easily seen from the polyhedral description of an M\(^{\natural }\)-convex polyhedron. Therefore, \([a, b]_{{\mathbb {R}}} \subseteq Q_1 \cap Q_2 = P\). Thus we have proved \([a, b]_{{\mathbb {R}}} = P\).
The general case where P may be unbounded can be treated as follows. For each \(i \in N\), put \(a_{i}:= \inf _{y \in P}y_{i}\) and \(b_{i}:= \sup _{y \in P}y_{i}\), where we have the possibility of \(a_{i}=-\infty \) and/or \(b_{i}=+\infty \). Obviously, \(P \subseteq [a, b]_{{\mathbb {R}}}\) holds. To prove \([a, b]_{{\mathbb {R}}} \subseteq P\), take any \(x \in [a, b]_{{\mathbb {R}}}\). For each \(i \in N\), there exist vectors \(p^{i}, q^{i} \in P\) such that \(p^{i}_{i} \le x_{i} \le q^{i}_{i}\), where \(p^{i}_{i}\), \(x_{i}\), and \(q^{i}_{i}\) denote the ith component of vectors \(p^{i}\), x, and \(q^{i}\), respectively. Since \(p^{i}, q^{i} \in P = P_1 + P_2\), we can express them as \(p^{i} = p^{i1} + p^{i2}\), \(q^{i} = q^{i1} + q^{i2}\) with some \(p^{ik}, q^{ik} \in P_{k}\) \((k = 1, 2)\). Consider
and let \(p:= p^{1} + p^{2} \in P\) and \(q:= q^{1} + q^{2} \in P\). Then, for each \(i \in N\), we have
showing \(x \in [p, q]_{{\mathbb {R}}}\). Since \(p, q \in P= Q_1 \cap Q_2\), we have \(p, q \in Q_{k}\) for \(k=1,2\), where \(p \le q\). This implies \([p, q]_{{\mathbb {R}}} \subseteq Q_{k}\), which follows from the polyhedral description of an M\(^{\natural }\)-convex polyhedron. Therefore, \(x \in [p, q]_{{\mathbb {R}}} \subseteq Q_1 \cap Q_2 = P\), where x is an arbitrarily chosen element of \([a, b]_{{\mathbb {R}}}\). Hence \([a, b]_{{\mathbb {R}}} \subseteq P\). Thus we complete the proof of \([a, b]_{{\mathbb {R}}} = P\).
7 Conclusion
We conclude this paper by summarizing our present knowledge about the polyhedral description of discrete convex sets in Table 1. The polyhedral description of M\(_{2}\)-convex (resp.,M\(^{\natural }_{2}\)-convex) sets is obtained immediately from that of M-convex (resp., M\(^{\natural }\)-convex) sets; see Remark 6.1. The polyhedral description of multimodular sets, described in Theorem A.1, has recently been obtained in [15]. Polyhedral descriptions are not known for integrally convex sets [18, Section 3.4], discrete midpoint convex sets [16], and directed discrete midpoint convex sets [30].
Notes
“L” stands for “Lattice” and “L\(^{\natural }\)” should be read “ell natural.”
This fact is stated in [18, p.129] without a proof.
The statement of [18, Theorem 8.33] imposes the condition “\(\{ i_{1}, \ldots , i_{m} \} \cap \{ j_{1}, \ldots , j_{m} \} =\emptyset \)” which allows the possibility of \(i_{p} = i_{q}\) or \(j_{p} = j_{q}\) for \(p \ne q\), but this can be strengthened to the condition that \(i_{1}, \ldots , i_{m}, j_{1}, \ldots , j_{m}\) should be all distinct. There is a typo in [18, page 228, line 5]: “\(f_{2}(x + \chi _{u_{i+1}} - \chi _{v_{i}})\)” should be “\(f_{2}(x - \chi _{u_{i+1}} + \chi _{v_{i}})\).”
Matrix \(B_{k}\) is the transpose of the incidence matrix of the graph \(G_{k}\) in Sect. 4.1.
References
Chen, X.: L\(^{\natural }\)-convexity and its applications in operations. Front. Eng. Manag. 4, 283–294 (2017)
Chen, X., Li, M.: Discrete convex analysis and its applications in operations: a survey. Manag. Sci. 30, 1904–1926 (2021)
Chervet P., Grappe, R., Robert, L.-H.: Box-total dual integrality, box-integrality, and equimodular matrices. Math. Program. Ser. A 188, 319–349 (2021)
Cook, W.: Operations that preserve total dual integrality. Oper. Res. Lett. 2, 31–35 (1983)
Cook, W.: On box totally dual integral polyhedra. Math. Program. 34, 48–61 (1986)
Edmonds, J., Giles, R.: Total dual integrality of linear inequality systems. In: Pulleyblank, W.R. (ed.) Progress in Combinatorial Optimization, pp. 117–129. Academic Press, New York (1984)
Frank, A., Murota, K.: A discrete convex min-max formula for box-TDI polyhedra. Math. Oper. Res. 47, 1026–1047 (2022)
Frank, A., Tardos, É.: Generalized polymatroids and submodular flows. Math. Program. 42, 489–563 (1988)
Fujishige, S.: Submodular Functions and Optimization, 2nd edn. Annals of Discrete Mathematics 58, Elsevier, Amsterdam (2005)
Grünbaum, B.: Convex Polytopes, 2nd edn. Springer, New York (2003)
Hajek, B.: Extremal splittings of point processes. Math. Oper. Res. 10, 543–556 (1985)
Iwata, S.: On matroid intersection adjacency. Discrete. Math. 242, 277–281 (2002)
Iwata, S.: On the number of adjacent common bases in matroid intersection. Personal memorandum (2021)
Moriguchi, S., Murota, K.: On fundamental operations for multimodular functions. J. Oper. Res. Soc. Jpn. 62, 53–63 (2019)
Moriguchi, S., Murota, K.: Inclusion and intersection relations between fundamental classes of discrete convex functions. Submitted for publication (2021). arXiv:2111.07240
Moriguchi, S., Murota, K., Tamura, A., Tardella, F.: Discrete midpoint convexity. Math. Oper. Res. 45, 99–128 (2020)
Murota, K.: Discrete convex analysis. Math. Program. 83, 313–371 (1998)
Murota, K.: Discrete Convex Analysis. Society for Industrial and Applied Mathematics, Philadelphia (2003)
Murota, K.: Note on multimodularity and L-convexity. Math. Oper. Res. 30, 658–661 (2005)
Murota, K.: Recent developments in discrete convex analysis. In: Cook, W., Lovász, L., Vygen, J. (eds.) Research Trends in Combinatorial Optimization, Chapter 11, pp. 219–260. Springer, Berlin (2009)
Murota, K.: Discrete convex analysis: a tool for economics and game theory. J. Mech. Inst. Des. 1, 151–273 (2016)
Murota, K.: A survey of fundamental operations on discrete convex functions of various kinds. Optim. Methods Softw. 36, 472–518 (2021)
Murota, K., Shioura, A.: Relationship of M-/L-convex functions with discrete convex functions by Miller and by Favati-Tardella. Discret. Appl. Math. 115, 151–176 (2001)
Murota, K., Shioura, A.: Dijkstra’s algorithm and L-concave function maximization. Math. Program. Ser. A 145, 163–177 (2014)
Murota, K., Tamura, A.: Integrality of subgradients and biconjugates of integrally convex functions. Optim. Lett. 14, 195–208 (2020)
Schrijver, A.: Theory of Linear and Integer Programming. Wiley, New York (1986)
Schrijver, A.: Combinatorial Optimization—Polyhedra and Efficiency. Springer, Heidelberg (2003)
Shioura, A.: Algorithms for L-convex function minimization: connection between discrete convex analysis and other research areas. J. Oper. Res. Soc. Jpn. 60, 216–243 (2017)
Simchi-Levi, D., Chen, X., Bramel, J.: The Logic of Logistics: Theory, Algorithms, and Applications for Logistics Management, 3rd edn. Springer, New York (2014)
Tamura, A., Tsurumi, K.: Directed discrete midpoint convexity. Jpn. J. Ind. Appl. Math. 38, 1–37 (2021)
Ziegler, G.M.: Lectures on Polytopes. Springer, New York (1995) (Corrected and updated printing (2007))
Acknowledgements
This work was partially supported by JSPS KAKENHI Grant Numbers JP17K00037, JP20K11697, JP21K04533. The authors thank Akihisa Tamura for careful reading of the manuscript and to Satoru Iwata for communicating his personal memorandum [13]. Comments from the referees were helpful to improve the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Definitions from discrete convex analysis
A Definitions from discrete convex analysis
1.1 L-convex and M-convex functions
A function \(f: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\) with \(\mathrm{dom\,}f \not = \emptyset \) is called L-convex if it is submodular:
for all \(x, y \in {\mathbb {Z}}^{n}\) and there exists \(r \in {\mathbb {R}}\) such that
for all \(x \in {\mathbb {Z}}^{n}\) and \(\mu \in {\mathbb {Z}}\).
A function \(f: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\) with \(\mathrm{dom\,}f \not = \emptyset \) is called L\(_{2}\)-convex if it can be represented as the (integral) infimal convolution \(f_{1} \Box f_{2}\) of two L-convex functions \(f_{1}\) and \(f_{2}\), that is, if
It is known [18, Note 8.37] that the infimum is always attained as long as it is finite.
A function \(f: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\) with \(\mathrm{dom\,}f \not = \emptyset \) is called M-convex if it satisfies the exchange property:
- (M-EXC):
-
For any \(x, y \in \mathrm{dom\,}f\) and \(i \in \mathrm{supp}^{+}(x-y)\), there exists \(j \in \mathrm{supp}^{-}(x-y)\) such that
$$\begin{aligned} f(x) + f(y) \ge f(x-e^{i}+e^{j}) + f(y+e^{i}-e^{j}). \end{aligned}$$
A nonempty set S is called M-convex if its indicator function \(\delta _{S}\) is an M-convex function.
A function \(f: {\mathbb {Z}}^{n} \rightarrow {\mathbb {R}}\cup \{ +\infty \}\) with \(\mathrm{dom\,}f \not = \emptyset \) is called M\(_{2}\)-convex if it can be represented as the sum of two M-convex functions \(f_{1}\) and \(f_{2}\), that is, if \(f(x) = f_{1}(x) + f_{2}(x)\) \((x \in {\mathbb {Z}}^{n})\). A nonempty set S is called M\(_{2}\)-convex if it is the intersection of two M-convex sets, or equivalently, if its indicator function \(\delta _{S}\) is an M\(_{2}\)-convex function.
The reader is referred to [18] for characterizations and properties of L-, L\(_{2}\)-, M-, and M\(_{2}\)-convex functions.
1.2 Multimodular sets
Let \(\mathcal{F}\subseteq {\mathbb {Z}}^{n}\) be the set of vectors defined by \(\mathcal{F}= \{ -e^{1}, e^{1}-e^{2}, e^{2}-e^{3}, \ldots , e^{n-1}-e^{n}, e^{n} \} \), where \(e^{i}\) denotes the ith unit vector for \(i =1,2,\ldots , n\). A set \(S \subseteq {\mathbb {Z}}^{n}\) is said to be multimodular if
for all \(z \in {\mathbb {Z}}^{n}\) and all distinct \(d, d' \in \mathcal{F}\). (The concept of multimodularity is introduced by Hajek [11] for functions and its set version is formulated in [14].)
It is known [14, 19] that multimodular sets are precisely those sets which are obtained from L\(^{\natural }\)-convex sets by a simple coordinate change. Define a bidiagonal matrix \(D=(d_{ij} \mid 1 \le i,j \le n)\) by \( d_{ii}=1\) \((i=1,2,\ldots ,n)\) and \( d_{i+1,i}=-1\) \((i=1,2,\ldots ,n-1)\). This matrix D is unimodular, and its inverse \(D^{-1}\) is an integer lower-triangular matrix with \((D^{-1})_{ij}=1\) for \(i \ge j\) and \((D^{-1})_{ij}=0\) for \(i < j\).
Proposition A.1
([14, 19]) A set \(S \subseteq {\mathbb {Z}}^{n}\) is multimodular if and only if it can be represented as \(S = \{ D y \mid y \in T \}\) for some L\(^{\natural }\)-convex set T, where T is uniquely determined from S as \(T = \{ D^{-1} x \mid x \in S \}\).
In accordance with this relation, we call a polyhedron P a multimodular polyhedron if it can be represented as \(P = \{ D y \mid y \in Q \}\) for some L\(^{\natural }\)-convex polyhedron Q. Such Q is uniquely determined from P as \(Q = \{ D^{-1} x \mid x \in P \}\).
Multimodular sets and polyhedra can be described by inequalities as follows. A subset I of the index set \(N = \{ 1,2,\ldots , n \}\) is said to be consecutive if it consists of consecutive numbers, that is, it is a set of the form \(I = \{ k, k+1, \ldots , \ell -1, \ell \}\) for some \(k \le \ell \).
Theorem A.1
[15] Let \(N = \{ 1,2,\ldots , n \}\).
-
(1)
A nonempty set \(P \subseteq \mathbb {R}^{n}\) is a multimodular polyhedron if and only if it can be represented as \( P = \{ x \in {\mathbb {R}}^{n} \mid a_{I} \le x(I) \le b_{I} \ \ (I\,:\text{ consecutive } \text{ subset } \text{ of } N) \}\) for some \(a_{I} \in {\mathbb {R}}\cup \{ -\infty \}\) and \(b_{I} \in {\mathbb {R}}\cup \{ +\infty \}\) indexed by consecutive subsets I of N.
-
(2)
A nonempty set \(S \subseteq \mathbb {Z}^{n}\) is a multimodular set if and only if it can be represented as \( S = \{ x \in {\mathbb {Z}}^{n} \mid a_{I} \le x(I) \le b_{I} \ \ ( I: \text{ consecutive } \text{ subset } \text{ of } N) \}\) for some \(a_{I} \in {\mathbb {Z}}\cup \{ -\infty \}\) and \(b_{I} \in {\mathbb {Z}}\cup \{ +\infty \}\) indexed by consecutive subsets I of N.
The above theorem implies immediately that a box is multimodular, which was pointed out first in [14, Proposition 2].
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Moriguchi, S., Murota, K. Note on the polyhedral description of the Minkowski sum of two L-convex sets. Japan J. Indust. Appl. Math. 40, 223–263 (2023). https://doi.org/10.1007/s13160-022-00512-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13160-022-00512-3