
Abstract
Stability in distribution for uncertain delay differential equations based on the strong Lipschitz condition only involving the current state has been successfully investigated. In reality, the uncertain delay differential equation is not only relate to the current state, but also relate to the past state, so it is very hard to obtain the strong Lipschitz condition. In this paper, the new Lipschitz condition concerning the current state and the past state is provided, if the uncertain delay differential equation satisfies the strong Lipschitz condition, it must satisfy the new Lipschitz condition, conversely, it may not be established. By means of the new Lipschitz condition, a sufficient theorem for the uncertain delay differential equation being stable in distribution is proved. Meanwhile, a class of uncertain delay differential equation is certified to be stable in distribution without any limited condition. Besides, the effectiveness of the above sufficient theorem is verified by two numerical examples.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Delay differential equations have been successfully applied in the feedback mechanism systems, such as the SIS epidemic system (Liu 2015a), the competitive diffusive system (Lin 2018), and the hepatitis B virus infection system (Guo and Cai 2012). The feedback mechanism systems are affected by the “noise”, such as the biologically motivated signal transmission system (Xu et al. 2009), the optimal control system (Ma and Liu 2017), and the financial system (Shen et al. 2014). If the “noise” are modelled by Wiener processes, stochastic delay differential equations (Hereinafter called SDDEs for short) involving the Wiener processes are employed to model the feedback mechanism systems, where the Wiener processes stand for a series of random variables under the framework of probability theory. A prerequisite of probability theory is that the distribution is close enough to the real frequency. In some cases, this prerequisite can not be satisfied, for example, Liu (2015b) pointed out evolutions of some undetermined phenomena do not behave like randomness, Tang and Yang (2021) presented that stochastic chemical reaction involving the Wiener process is unsuitable, Lio and Liu (2021) introduced that stochastic COVID-19 spread model involving the Wiener process is unreasonable.
In addition to probability theory, Liu processes under the framework of uncertainty theory (Liu 2015b) were applied to describe the “noise”. Liu processes indexed by a series of uncertain variables were designed by Liu (2008). By means of the Liu process, uncertain differential equations (Hereinafter called UDEs for short) were suggested by Liu (2008). After that, Liu (2009), Sheng and Gao (2016), and Sheng and Wang (2014) investigated the stability of UDEs, Yao and Chen (2013), Yang and Shen (2015), and Yang and Ralescu (2015) used different numerical methods to obtain the numerical solutions of UDEs. Moreover, the UDEs have been extensively used in the spread of COVID-19 (Lio and Liu 2021), the pharmacokinetics (Liu and Yang 2021), the finance (Zhu 2014), and the insurance (Liu and Yang 2020). Besides, the different styles of UDEs were explored, including the UDEs with jump (Yao 2012), the multi-dimensional UDEs (Yao 2014), the high-order UDEs (Yao 2016), the UDEs with a delay time (Hereinafter called UDDEs for short) (Barbacioru 2010), the UDEs with partial information (Liu and Zhang 2020), and the UDEs with multifactor (Li et al. 2015).
The stability of systems plays a significant role in modelling the real world. In other words, if the system is not stable, even though the difference between the given initial value and the precise initial value is small, the difference between the results becomes larger. At present, many styles of stability for UDDEs were investigated containing the stability in measure (Wang and Ning 2017), the almost sure stability (Wang and Ning 2019), and the stability in distribution (Jia and Sheng 2019). The above stability in distribution for UDDEs was studied based on the strong Lipschitz condition only concerning the current state, which was difficult to be obtained due to the fact that the UDDEs include both the current and the past states. Therefore, the new Lipscitz conditions involving the current and the past states are proposed to solve this issue in this paper. In fact, the new Lipschitz condition is weaker than the strong Lipschitz condition. In other words, if the UDDEs satisfy the strong Lipschitz condition, it must satisfy the new Lipschitz condition, conversely, it may not be established. Based on the new Lipschitz condition, a sufficient theorem for UDDEs being stable in distribution is verified. Meanwhile, a class of UDDEs is proved to be stable in distribution without any limited condition. Moreover, two numerical examples are provided to verify the effectiveness of the above sufficient theorem. If we can not obtain the new Lipschitz condition, we can not judge the stability in distribution for UDDEs. In the future, we can consider the stability in p-th moment based on the new Lipschitz condition and the p-th moment exponential stability for UDDEs.
The rest of this paper is structured as follows. Section 2 introduces the related work. Section 3 gives an overview of UDDEs. Section 4 presents a sufficient theroem of stability in distribution based on new Lipschitz condition for UDDEs. Section 5 proves a class of UDDEs being stable in distribution without any limited condition. Section 6 provides two numerical examples to verify the effectiveness of the above sufficient theorem. Section 7 discusses some results of this article.
2 Related work
Uncertainty theory was founded by Liu (2015b), which has been investigated by many scholars. Uncertain process in uncertainty theory stands for a sequence of uncertain variables indexed by time. Liu process as a class of uncertain process satisfies the conditions that almost all sample paths are Lipschitz continuous, and has stationary and independent increments, every increment is a normal uncertain variable with expected value 0 and variance \(t^2\).
Differential equations involving the Liu process were called uncertain differential equations(UDEs) (2008), the existence and uniqueness theorem of solution for UDEs was proved by Chen and Liu (2010) and Gao (2012). Later, the concept of stability in measure was provided by Liu (2009), and the corresponding theorems of stability in measure was verified by Yao et al. (2013). Moreover, the stability in mean (Yao et al. 2015), the stability in p-th moment (Sheng and Wang 2014), the stability in inverse distribution (Yang et al. 2017a), the almost sure stability (Liu et al. 2014), and the exponential stability (Sheng and Gao 2016) of UDEs were successfully explored. In order to obtain the numerical solution of UDEs, many numerical methods are proposed including the 99-method (Yao and Chen 2013), the Runge–Kutta method (Yang and Shen 2015; Yang and D 2015), the Milne method (Gao 2016), and the Hamming method (Zhang et al. 2017).
As a special UDEs, the UDEs with jumps have been investigated by many scholars, for example, the existence and uniqueness theorem of solutions was considered by Yao (2015), the stability in measure (Yao 2015), the almost sure stability (Ji and Ke 2016), the stability in mean (Gao 2019), the stability in p-th moment (Ma et al. 2017b), and the p-th moment exponential stability (Liu et al. 2020) were presented. Except for the above UDEs with jumps, the existence and uniqueness theorem (Ji and Zhou 2015), the stability in measure (Su et al. 2016), the stability in p-th moment (Shi et al. 2020), the stability in mean (Sheng and Shi 2019) for multi-dimensional UDEs were successfully explored. Besides, the stability analysis of nonlinear uncertain fractional differential equations with Caputo derivative was presented by Lu et al. (2021), and the stability in mean for uncertain delay differential equations based on new Lipschitz conditions was investigated by Gao and Jia (2021).
In some special cases, the systems were affected by many factors, multifactor uncertain differential equations were proposed by Li et al. (2015), the almost sure stability (Sheng et al. 2017), the stability in mean (Zhang et al. 2016), the stability in measure (Zhang et al. 2016), and the stability in distribution (Ma et al. 2017a) for multifactor uncertain differential equations were investigated. Additionally, many scholars studied the stability analysis for uncertain spring vibration equations (Jia et al. 2021), uncertain wave equations (Gao et al. 2019), and uncertain heat equations (Liu and Zhang 2020).
3 Preliminaries
For the purpose of modelling the dynamics of uncertain phenomena, Liu (2009) designed a Liu process to cope with the environmental noise perturbations.
Definition 1
Liu (2015b) An uncertain process \(C_{t}\) is said to be a Liu process if:
-
\(C_{0}=0\) and almost all sample paths are Lipschitz continuous.
-
\(C_{t}\) has stationary and independent increments.
-
Every increment \(C_{s+t}-C_{s}\) is a normal uncertain variable with expected value 0 and variance \(t^2\), whose uncertain distribution is
$$\begin{aligned} \Lambda (x)=\left( 1+\exp \left( \frac{-\pi x}{\sqrt{3}t}\right) \right) , x\in \textit{R}. \end{aligned}$$
Based on the Liu process, Barbacioru (2010) defined the following UDDEs.
Definition 2
Barbacioru (2010) Assume that \(f_{1}\) and \(f_{2}\) are two real-valued functions, \(C_{t}\) stands for the Liu process, then the following equation
is termed as an UDDE, where \(C_{t}\) and the positive number \(\tau\) stand for the Liu process and a time delay, respectively.
Moreover, Yao and Chen (2013) proved the following existence and uniqueness theorem.
Theorem 1
Yao and Chen (2013) The UDDE (1) with initial states has a unique solution if the coefficients
and
for some positive constant L.
Theorem 2
Yao and Chen (2013) Let \(\mathcal{M}\) denotes the uncertain measure defined in Liu’s book Liu (2015b), \(U_{t}\) be the solution of the uncertain differential equation
and \(U_{t}^{\alpha }\) stands for the \(\alpha\)-path of \(U_{t}\), \(0<\alpha <1\), it is obtained by solving the following equation
where \(\Lambda ^{-1}(\alpha )\) be the inverse distribution function of normal uncertain variables, i.e.,
then
Besides, Wang and Ning (2017) defined the stability in measure, the stability in mean, and the stability in p-th moment, and gave the corresponding sufficient theorem based on the strong Lipschitz condition, Jia and Sheng (2019) introduced the definition of the stability in distribution, and provided a sufficient theorem based on the strong Lipschitz condition.
Definition 3
Wang and Ning (2017) The UDDE (1) is said to be stable in measure if for any two solutions \(U_{t}\) and \(V_{t}\) with different initial states, we have
for any given number \(\epsilon >0\).
Theorem 3
Wang and Ning (2017) Assume the UDDE (1) has a unique solution for each given initial state. Then it is stable in measure if the coefficients \(f_{1}(t,u,v)\) and \(f_{2}(t,u,v)\) satisfy the strong Lipschitz condition
where \(L_{t}\) is a bounded function satisfying
Definition 4
Wang and Ning (2017) The UDDE (1) is said to be stable in mean if for any two solutions \(U_{t}\) and \(V_{t}\) with different initial states, we have
Theorem 4
Wang and Ning (2017) Assume the UDDE (1) has a unique solution for each given initial state. Then it is stable in mean if the coefficients \(f_{1}(t,u,v)\) and \(f_{2}(t,u,v)\) satisfy the strong Lipschitz condition
where \(F_{t}\) and \(G_{t}\) are two bounded functions satisfying
Definition 5
Wang and Ning (2017) The UDDE (1) is said to be stable in p-th moment (\(0<p<+\infty\)) if for any two solutions \(U_{t}\) and \(V_{t}\) with different initial states, we have
Theorem 5
Wang and Ning (2017) Assume the UDDE (1) has a unique solution for each given initial state. Then it is stable in p-th moments (\(0<p<+\infty\)) if the coefficients \(f_{1}(t,u,v)\) and \(f_{2}(t,u,v)\) satisfy the strong Lipschitz condition
where \(F_{t}\) and \(G_{t}\) are two bounded functions satisfying
Theorem 6
Wang and Ning (2017) For any two real numbers \(p_{1}\) and \(p_{2}\) (\(0<p_{1}<p_{2}<+\infty\)), if the UDDE (1) is stable in \(p_{2}\)-th moment, then it is stable in \(p_{1}\)-th moment.
Theorem 7
Wang and Ning (2017) If the UDDE (1) is stable in mean, then it is stable in measure.
Theorem 8
Wang and Ning (2017) If the UDDE (1) is stable in p-th moment (\(0<p<+\infty\)), then it is stable in measure.
Definition 6
Wang and Ning (2019) Suppose that \(U_{t}\) and \(V_{t}\) are two solutions of the UDDE (1) with different initial states \(u_{j}\) and \(v_{j}\) for any \(j\in [-\tau ,0]\), respectively. Uncertain delay differential equation is said to be stable almost surely if
Theorem 9
Wang and Ning (2019) Suppose that the UDDE (1) has a unique solution for each given initial state, then the UDDE (1) is stable almost surely if the coefficients \(f_{1}(t,u,v)\) and \(f_{2}(t,u,v)\) satisfy
where \(L_{t}\ge 0\) and
Definition 7
Jia and Sheng (2019) Assume that \(U_{t}\) and \(V_{t}\) are the solutions of the UDDE (1) for different prescribed initial states \(U_{s}\) and \(V_{s}\) (\(s\in [-\tau , 0]\)), respectively. If the following condition holds,
where \(\Theta _{t}(\cdot )\) and \(\Psi _{t}(\cdot )\) stand for the distribution functions of \(U_{t}\) and \(V_{t}\), respectively, \(\forall x\in \Re\), then the UDDE (1) is stable in distribution.
Theorem 10
Jia and Sheng (2019) Assume the coefficients of the UDDE (1) with a unique solution for each prescribed initial state satisfy the strong Lipschitz condition
where \(H_{t}\) is a positive function satisfying
then the UDDE (1) is stable in distribution.
4 A sufficient theorem
In this section, a sufficient theorem of stability in distribution for UDDEs based on new Lipschitz condition is explored. Firstly, we introduce two important theorems as below, which play a significant role in proving the sufficient theorem.
Theorem 11
Yang et al. (2017b) Let \(\eta , \eta _{1}, \eta _{2}, \dots\) be a series of uncertain variables, their corresponding regular uncertainty distributions be \(\Phi , \Phi _{1}, \Phi _{2}, \dots ,\) respectively. Then \(\{\eta _{n}\}\) converges in inverse distribution to \(\eta\) if and only if it converges in distribution to \(\eta\).
Theorem 12
Gronwall (1919) Set I denotes \([c_{1},+\infty )\), \([c_{1},c_{2}]\) or \([c_{1},c_{2})\) with \(c_{1}<c_{2}\). Let \(\varrho\) and \(\sigma\) defined on I are two real-valued non-negative continuous functions, \(\rho\) is integrable on every closed and bounded subinterval of I. If the following inequality
holds and \(\rho\) is non-decreasing, then we have
Theorem 13
If the coefficients of the UDDE (1) with a unique solution for each prescribed initial state satisfy the new Lipschitz condition
\(\forall u_{i}, v_{i}\in \Re , i=1, 2, t>0\), where the functions \(B_{jt}\) satisfies the conditions
then the UDDE (1) is stable in distribution.
Proof
For the different prescribed initial states \(u_{s}\) (\(s\in [-\tau ,0]\)) and \(v_{s}\) (\(s\in [-\tau ,0]\)), we assume that \(U_{t}\) and \(V_{t}\) are the corresponding solutions of the UDDE (1). According to the Theorem 2, the corresponding inverse uncertainty distributions \(\Theta _{t}^{-1}(\alpha )\) and \(\Psi _{t}^{-1}(\alpha )\) of \(U_{t}\) and \(V_{t}\) satisfy the following equations
respectively, where
For all \(\alpha \in \text {(0,1)}\), we obtain
Apply the new Lipschitz condition (9), we have
Meanwhile, we set \(u=s-\tau\), and obtain
Similarly, we have
Set \(N_{1}=\int _{0}^{\tau }B_{2u}\mathrm{d}u\) and \(N_{2}=\int _{0}^{\tau }B_{4u}\mathrm{d}u\), we have
The above Eq. (10) satisfies the Theorem 12, then we have
Since
there exists a real number \(M>0\) such that
Assume that \(\delta =\epsilon /M\), then we have
for any \(t\ge 0\) and \(\epsilon >0\) provided
Thus, we have
According to the Theorem 11, we have
Therefore, the UDDE (1) is stable in distribution based on the new Lipschitz condition (9).
Remark 41
If the UDDEs satisfy the strong Lipschitz condition of Theorem 10, we set \(B_{2t}=0\) and \(B_{4t}=0\), it must satisfy the new Lipschitz condition in Theorem 13. In contrast, it is obvious that it may not be established, the Example 1 can be employed to illustrate this point.
Example 1
Consider the UDDE
Firstly, we set
If we want to use the Theorem 10, we can easily find that it does not follow the strong Lipschitz condition, and if we use the Theorem 13, we obtain that the following equations hold,
According to the Theorem 13, the UDDE (11) is stable in distribution.
Corollary 41
If the coefficients of the UDDE (1) with a unique solution for each prescribed initial state satisfy the new Lipschitz condition
\(\forall u_{i}, v_{i}\in \Re , i=1, 2, t>0\), where the functions \(D_{jt}\) satisfy the conditions
then the UDDE (1) is stable in distribution.
Proof
By using the condition (12), we obtain
According to the Theorem 13, we set
then the UDDE (1) based on the new Lipschitz condition (12) is stable in distribution.
Remark 42
In fact, Theorem 13 and Corollary 41 have a equivalence relation. If the new Lipschitz condition of Theorem 13 holds, we set \(B_{1t}=D_{1t}, B_{2t}=D_{2t}, B_{3t}=D_{1t}, B_{4t}=D_{2t}\), then the Lipschitz condition of Corollary 41 holds. Conversely, if the new Lipschitz condition of Corollary 41 holds, we set \(D_{1t}=B_{1t}+B_{3t}, D_{2t}=B_{2t}+B_{4t}\), then the new Lipschitz condition of Theorem 13 holds.
Corollary 42
Assume the UDDE
satisfying
then the UDDE (13) is stable in distribution.
Proof
We set \(f_{1}(t,u,v)= b_{1t}u+b_{2t}v+b_{3t}\) and \(f_{2}(t,u,v)= b_{4t}u+b_{5t}v+b_{6t}\), then we have
By use of the condition (14) and Theorem 13, we obtain that the UDDE (13) is stable in distribution.
Example 2
Consider the UDDE
Then, we have
By using the Corollary 42, the UDDE (15) is stable in distribution.
5 Stability in distribution for a special UDDEs
In this section, a class of UDDEs being stable in distribution are investigated.
Theorem 14
Consider the UDDEs
where \(K_{t}\) and a are the real-valued function and the constant number, respectively, \(t\in [0,T]\), then the UDDE (16) is stable in distribution.
Proof
For the different prescribed initial states \(n_{\theta }\) and \(m_{\theta }\), \(\theta \in [-\tau ,0]\), the corresponding solutions are \(U_{t}\) and \(V_{t}\). According to the Theorem 2, we have
and
Thus,
Then,
According to the Theorem 11, we have
Remark 51
The Theorem 14 is different from the Theorems 7 and 13. Example 3 shows that it is stable in distribution, but it becomes invalid by using the Theorems 7 and 13.
Example 3
Consider the UDDE
According to the Theorem 14, the UDDE (17) is stable in distribution. Due to the fact that
6 Numerical experiments
The stability is a significant issue for systems to model the real world. In other words, if the system is not stable, even though the difference between the given initial value and the precise initial value is small, the difference between the results becomes larger. This section devotes to illustrating the effectiveness of the Theorem 13.
Example 4
The UDDE (15) has been proved that it is stable in distribution, and has a following \(\alpha\)-path obtained by the Theorem 2,
According to the Eq. (18), the algorithm to calculate \(U_{t}\) is design as below.
-
Step 0: Set \(t_{i}=iT/M, i=1,2,\dots ,M,\) where M are two large numbers.
-
Step 1: Set \(i=0\).
-
Step 2: Set \(i=\leftarrow i+1\).
-
Step 3: Set \(U_{t_{i+1}}^{\alpha }=U_{t_{i}}^{\alpha }+\left\{ \left( \exp (-t_{i})U_{t_{i}}^{\alpha }+\frac{1}{1+t_{i}^2}U_{t_{i}-1}^{\alpha }\right) +\right. \left| \frac{1}{2}t_{i}\exp (-t_{i})U_{t_{i}}^{\alpha }+\frac{\pi }{2\sqrt{3}}t_{i}\exp (-t_{i}^2)U_{t_{i}-1}^{\alpha }\right| \Lambda ^{-1}(\alpha )\Big \}(t_{i+1}-t_{i})\).
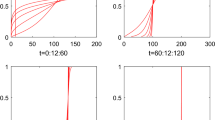
In the Figs. 1 and 2, Tables 1 and 2, we found that, when the difference between two initial values is enough small, the difference between the corresponding values \(U_{t}\) is sufficiently close together after a period of time. Therefore, it is verified that the UDDE (15) is stable in distribution.

Relations of \(U_{t}\) and h in the UDDE (15)

Relations of \(U_{t}\) and h in the UDDE (15)
Example 5
The well-known delay Logistic model
was introduced to model population by Hutchinson 1948, where \(P_{t}\) is the number of population at time t, r is a constant of proportionality, and N is the carrying capacity, which means \(P_{s}<N, \forall s>0\). Assume that this ecological system suffers from infectious diseases, then we set that r is exponential decrease with t, and have
In real world, there must be many uncertain factors for population growth, such as man-made and natural disasters, so we add an uncertain term in the above Logistic model to write as
with constant \(a>0\). Next, we analyze the stability in distribution of system (21).
Let
then, we obtain
and
Due to the fact that
According to the Theorem 13, the system (21) is stable in distribution. Next, we verify the above conclusion by numerical experiments. The following \(\alpha\)-path of the system (21) can be obtained by the Theorem 2,
According to the Eq. (22), the algorithm to calculate \(U_{t}\) is design as below.
-
Step 0: Set \(t_{i}=iT/N, i=1,2,\dots ,N,\) where N are two large numbers.
-
Step 1: Set \(i=0\).
-
Step 2: Set \(i=\leftarrow i+1\).
-
Step 3: Set \(P_{t_{i+1}}^{\alpha }=P_{t_{i}}^{\alpha }+\left\{ \exp (-rt_{i})r P_{t_{i}}^{\alpha }\left( 1-\frac{P_{t_{i}-\tau }^{\alpha }}{N}\right) \right. +\left| \exp (-at_{i})P_{t_{i}}^{\alpha }\right| \Lambda ^{-1}(\alpha )\Big \}(t_{i+1}-t_{i})\).

Relations of \(P_{t}\) and h in the system (21)

Relations of \(P_{t}\) and h in the system (21)
In the Fig. 3 and Table 3, we assume that \(N=100, r=0.1, a=0.4, \tau =0.1, \alpha =0.3,\) then, we found that, when the difference among the initial values is enough small, the number of population \(P_{t}\) is also sufficiently close together after a period of time. In the Fig. 4and Tab.4, we assume that \(N=1000, r=0.7, a=0.2, \tau =0.7, \alpha =0.65,\) then the conclusion is the same as the Fig. 3. Therefore, the system (21) is confirmed that it is stable in distribution obtained from the Figs. 3 and 4.
7 Conclusions
The stability in distribution for UDDEs has been investigated by means of the strong Lipschitz condition, but it was difficult to obtain the strong Lipschitz condition. In this paper, the new Lipschitz condition concerning the current and the past states was proposed. Based on the new Lipschitz condition, a sufficient theorem of stability in distribution for the UDDEs was proved. Without any limited condition, a class of UDDEs being stable in distribution was successfully proved. Through the Figs. 1, 2, 3 and 4, Tables 1, 2, 3 and 4, the difference between the given initial value and the precise initial value is small enough, the difference between the results becomes smaller. In other words, the effectiveness of the above sufficient theorem was verified. If the new Lipschitz condition can not be obtained, we can not judge the stability in distribution for the UDDEs. In the future, we can consider the stability in p-th moment based on the new Lipschitz condition and the p-th moment exponential stability for the UDDEs.
Abbreviations
- SIS:
-
Susceptible-Infectious-Susceptible
- SDDEs:
-
Stochastic delay differential equations
- UDEs:
-
Uncertain differential equations
- UDDEs:
-
Uncertain delay differential equations
- \(\mathcal{M}\) :
-
Uncertain measure
- \(\Phi ,\Psi\) :
-
Uncertain distribution functions
- \(\Phi ^{-1},\Psi ^{-1}\) :
-
Inverse uncertain distribution functions
- \(C_{t}\) :
-
Liu process
- \(\Lambda\) :
-
The distribution function of normal uncertain variable
- \(\Lambda ^{-1}\) :
-
The inverse distribution function of normal uncertain variable
- \(U_{t}, V_{t}\) :
-
Uncertain process
- \(\bigvee\) :
-
Maximum operator
- \(\mathrm{E}\) :
-
Expected value
- \(\tau\) :
-
Delay time
References
Barbacioru IC (2010) Uncertainty functional differential equations for finance. Surv Math Appl 5:275–284
Chen X, Liu B (2010) Existence and uniqueness theorem for uncertain differential equations. Fuzzy Optim Decis Making 9(1):69–81
Gao R (2016) Milne method for solving uncertain differential equations. Appl Math Comput 274:774–785
Gao R (2019) Stability in mean for uncertain differential equation with jumps. Appl Math Comput 346:15–22
Gao R, Ma N, Sun G (2019) Stability of solution for uncertain wave equation. Appl Math Comput 356:469–478
Gao Y (2012) Existence and uniqueness theorem on uncertain differential equations with local Lipschitz condition. J Uncertain Syst 6(3):223–232
Gao Y, Jia L (2021) Stability in mean for uncertain delay differential equations based on new Lipschitz conditions. Appl Math Comput 399(23–24):126050
Gronwall T (1919) Note on the derivatives with respect to a parameter of the solutions of a system of differential equations. Ann Math 20(4):292–296
Guo B, Cai L (2012) A note for the global stability of a delay differential equation of hepatitis b virus infection. Math Biosci Eng 8(3):689–694
Hutchinson G (1948) Circular causal systems in ecology. Ann NY Acad Sci 50:221–246
Ji X, Ke H (2016) Almost sure stability for uncertain differential equation with jumps. Soft Comput 20(2):547–553
Ji X, Zhou J (2015) Multi-dimensional uncertain differential equation: existence and uniqueness of solution. Fuzzy Optim Decis Making 14(4):477–491
Jia L, Dan R, Chen W (2021) Stability analysis of uncertain spring vibration equations. Eng Optim 53(1):71–85
Jia L, Sheng Y (2019) Stability in distribution for uncertain delay differential equation. Appl Math Comput 343(4):49–56
Li S, Peng J, Bo Z (2015) Multifactor uncertain differential equation. J Uncertain Anal Appl 3:7
Lin G (2018) Minimal wave speed of competitive diffusive systems with time delays. Appl Math Lett 76:164–169
Lio W, Liu B (2021) Initial value estimation of uncertain differential equations and zero-day of covid-19 spread in china. Fuzzy Optim Decis Making 20:177–188
Liu B (2008) Fuzzy process, hybrid process and uncertain process. J Uncertain Syst 2(1):3–16
Liu B (2009) Some research problems in uncertainty theory. J Uncertain Syst 3(1):3–10
Liu B (2015) Convergence of an sis epidemic model with a constant delay. Appl Math Lett 49:113–118
Liu B (2015) Uncertainty theory, 4th edn. Springer-Verlag, Berlin
Liu Z, Yang X (2020) Uncertain insurance risk process with single premium and multiple classes of claims. J Ambient Intell Human Comput. https://doi.org/10.1007/s12652-020-02486-x
Liu Z, Yang X (2021) A linear uncertain pharmacokinetic model driven by liu process. Appl Math Model 89:1881–1899
Liu J, Zhang Y (2020) The stability analysis for uncertain heat equations based on \(p\)-th moment. Soft Comput 24:2833–2839
Liu H, Ke H, Fei W (2014) Almost sure stability for uncertain differential equation. Fuzzy Optim Decis Making 13:463–473
Liu S, Liu L, Wang N, Zhang J (2020) The pth moment exponential stability of uncertain differential equation with jumps. J Intell Fuzzy Syst 39(3):4419–4425
Lu Z, Zhu Y, Lu Q (2021) Stability analysis of nonlinear uncertain differential equations with caputo derivative. Fractals 29(3):2150057
Ma H, Liu B (2017) Optimal control problem for risk-sensitive mean-field stochastic delay differential equation with partial information. Asian J Control 19(6):2097–2115
Ma W, Liu L, Gao R, Zhang X, Zhang X (2017) Stability in distribution for multifactor uncertain differential equation. J Ambient Intell Humaniz Comput 8:707–716
Ma W, Liu L, Zhang X (2017) Stability in \(p\)-th moment for uncertain differential equation with jumps. J Intell Fuzzy Syst 33(3):1375–1384
Shen Y, Meng Q, Shi P (2014) Maximum principle for mean-field jump-diffusion stochastic delay differential equations and its application to finance. Automatica 50(6):1565–1579
Sheng Y, Gao J (2016) Exponential stability of uncertain differential equation. Soft Comput 20:3673–3678
Sheng Y, Shi G (2019) Stability in mean of multi-dimensional uncertain differential equation. Appl Math Comput 353:178–188
Sheng Y, Shi G, Cui Q (2017) Almost sure stability for multifactor uncertain differential equation. J Intell Fuzzy Syst 32(3):2187–2194
Sheng Y, Wang C (2014) Stability in \(p\)-th moment for uncertain differential equation. J Intell Fuzzy Syst 26(3):1263–1271
Shi G, Li X, Jia L (2020) Stability in \(p\)-th moment of multi-dimensional uncertain differential equation. J Intell Fuzzy Syst 38(4):5267–5277
Su T, Wu H, Zhou J (2016) Stability of multi-dimensional uncertain differential equation. Soft Comput 20:4991–4998
Tang H, Yang X (2021) Uncertain chemical reaction equation. Appl Math Comput 411:126479
Wang X, Ning Y (2017) Stability of uncertain delay differential equations. J Intell Fuzzy Syst 32:2655–2664
Wang X, Ning Y (2019) A new stability analysis of uncertain delay differential equations. Math Probl Eng 2019:1257386
Xu M, Wu F, Leung H (2009) A biologically motivated signal transmission approach based on stochastic delay differential equation. Chaos 19:033135
Yang X, Ralescu Dan A. (2015) Adams method for solving uncertain differential equations. Appl Math Comput 270:993–1003
Yang X, Ni Y, Yansheng Z (2017) Stability in inverse distribution for uncertain differential equations. J Intell Fuzzy Syst 32(3):2051–2059
Yang X, Ni Y, Zhang Y (2017) Stability in inverse distribution for uncertain differential equation. J Intell Fuzzy Syst 32:2051–2059
Yang X, Shen Y (2015) Runge-kutta method for solving uncertain differential equations. J Uncertain Anal Appl 3:17
Yao K (2012) Uncertain calculus with renewal process. Fuzzy Optimiz Decision Making 11(3):285–297
Yao K (2014) Multi-dimensional uncertain calculus with liu process. J Uncertain Syst 8(4):244–254
Yao K (2015) Uncertain differential equation with jumps. Soft Comput 19(7):2063–2069
Yao K (2016) Uncertain differential equations. Springer uncertainty research, Springer, Berlin
Yao K, Chen X (2013) A numerical method for solving uncertain differential equations. J Intell Fuzzy Syst 25(3):825–832
Yao K, Gao J, Gao Y (2013) Some stability theorems of uncertain differential equation. Fuzzy Optim Decis Making 12:3–13
Yao K, Ke H, Yuhong S (2015) Stability in mean for uncertain differential equation. Fuzzy Optim Decis Making 14:365–379
Zhang Y, Gao J, Huang Z (2017) Hamming method for solving uncertain differential equations. Appl Math Comput 313:331–341
Zhang Z, Gao R, Yang X (2016) The stability of multifactor uncertain differential equation. J Intell Fuzzy Syst 30(6):3281–3290
Zhu Y (2014) Uncertain fractional differential equations and an interest rate model. Math Methods Appl Sci 38(15):3359–3368
Funding
The work was supported by the Beijing Municipal Education Commission Foundation of China (No. KM202110038001), the Young Academic Innovation Team of Capital University of Economics and Business (No. QNTD202002), and the special fund of basic scientific research business fees of Beijing Municipal University of Capital University of Economics and Business (No. XRZ2020016).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gao, Y., Jia, L. Stability in distribution for uncertain delay differential equations based on new Lipschitz condition. J Ambient Intell Human Comput 14, 13585–13599 (2023). https://doi.org/10.1007/s12652-022-03826-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12652-022-03826-9