
Abstract
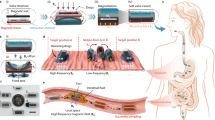
This paper presents a robotic capsule endoscope integrated a targeted drug delivery module (DDM) for digestive diseases treatments. The capsule with a big permanent magnet inside is wirelessly controlled and actively moves to target region in gastrointestinal tract by an electromagnetic actuation system (EMA). DDM is a separated body composed of a drug container and a non-power drug-releasing mechanism. The force to expel drug is generated by carbon dioxide gas pressure coming from a chemical reaction inside a propellant reservoir. Where the chemical reaction is activated by a mechanical mechanism that allows dry chemical powders contacting with water at the target point. A small permanent magnet is utilized to separate reagents and wet paper before drug injection. It is designed to be stable during locomotion by virtue of the attractive force of a big permanent magnet. To trigger releasing mechanism, gradient magnetic field from EMA system is created to push small magnet slide down, which allows reagents drop and contact with water in wet paper. The designed DDM has length of 11 mm and diameter of 11 mm. The proposed robotic capsule could show high potentials to be utilized for therapeutic treatment of digestive diseases in practical clinical sites through simulation and ex-vivo experiments.
Similar content being viewed by others

References
A. Singeap, C. Stanciu, and A. Trifan, “Capsule endoscopy: the road ahead,” World J Gastroenterol, vol. 22, no. 1, pp. 369–378, January 2016.
A. Koulaouzidis, D. K. Iakovidis, A. Karargyris, and E. Rondonotti, “Wireless endoscopy in 2020: will it still be a capsule?” World J Gastroenterol, vol. 21, no. 17, pp. 5119–5130, May 2015.
W. A. Qureshi, “Current and future applications of the capsule camera,” Nature Reviews Drug Discovery, vol. 3, no. 5, pp. 447–450, May 2004.
P. Valdastri, M. Simi, and R. J. Webster III, “Advanced technologies for gastrointestinal endoscopy,” Annual Review of Biomedical Engineering, vol. 14, pp. 397–429, May 2012.
A. W. Mahoney and J. J. Abbott, “Five-degree-of-freedom manipulation of an untethered magnetic device in fluid using a single permanent magnet with application in stomach capsule endoscopy,” The International Journal of Robotics Research, vol. 35, no. 1–3, pp. 129–147, February 2016.
M. C. Hoang, V. H. Le, J. Kim, E. Choi, B. Kang, J. O. Park, and C. S. Kim, “A wireless tattooing capsule endoscope using external electromagnetic actuation and chemical reaction pressure,” PloS One, vol. 14, no. 7, pp. 1–17, 2019.
G. Lucarini, M. Mura, G. Ciuti, R. Rizzo, and A. Menciassi, “Electromagnetic control system for capsule navigation: novel concept for magnetic capsule maneuvering and preliminary study,” Journal of Medical and Biological Engineering, vol. 35, no. 4, pp. 428–436, August 2015.
G. Ciuti, M. Salemo, G. Lucarini, P. Valdastri, A. Arezzo, A. Menciassi, M. Morino, and P. Dario, “A comparative evaluation of control interfaces for a robotic-aided endoscopic capsule platform,” IEEE Trans. on Robotics, vol. 28, no. 2, pp. 534–538, April 2012.
S. Yim and M. Sitti, “Design and rolling locomotion of a magnetically actuated soft capsule endoscope,” IEEE Trans. on Robotics., vol. 28, no. 1, pp. 183–194, February 2012.
H. Choi, S. Jeong, G. Go, C. Lee, J. Zhen, S. Y. Ko, J. O. Park, and S. Park, “Equitranslational and axially rotational microrobot using electromagnetic actuation system,” International Journal of Control, Automation and Systems, vol. 15, no. 3, pp. 1342–1350, June 2017.
S. Jeong, H. Choi, G. Go, C. Lee, S. Y. Ko, J. O. Park, and S. Park, “Feasibility study on magnetically steerable guidewire device for percutaneous coronary intervention,” International Journal of Control, Automation and Systems, vol. 15, no. 1, pp. 473–479, February 2017.
G. Go, Z. Jin, J. O. Park, and S. Park, “A thermoelectromagnetically actuated microrobot for the targeted transport of therapeutic agents,” International Journal of Control, Automation and Systems, vol. 16, no. 3, pp. 1341–1354, June 2018.
S. Nam, H. S. Lee, and Y. J. Lim, “Evaluation of gastric disease with capsule endoscopy,” Clin. Endosc., vol. 51, no. 4, pp. 323–328, July 2018.
Z. Liao, X. Hou, J. Sheng, Z. Ge, and B. Jiang, “Accuracy of magnetically controlled capsule endoscopy, compared with conventional gastroscopy, in detection of gastric diseases,” Clinical Gastroenterology and Hepatology, vol. 14, no. 9, pp. 1266–1273, September 2016.
U. Denzer, T. Rösch, B. Hoytat, M. Abdel-Hamid, X. Hebuterne, G. Vanbiervielt, J. Filippi, H. Ogata, N. Hosoe, K. Ohtsuka, and N. Ogata, “Magnetically guided capsule versus conventional gastroscopy for upper abdominal complaints: a prospective blinded study,” Journal of clinical gastroenterology, vol. 49, no. 2, pp. 101–107, February 2015.
M. C. Hoang, K. T. Nguyen, V. H. Le, J. Kim, E. Choi, B. Kang, J. O. Park, and C. S. Kim, “Independent electromagnetic field control for practical approach to actively locomotive wireless capsule endoscope,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 99, 2019. DOI: https://doi.org/10.1109/TSMC.2019.2917298
S. Yim, E. Gultepe, D. H. Gracias, and M. Sitti, “Biopsy using a magnetic capsule endoscope carrying, releasing, and retrieving untethered microgrippers,” IEEE Trans. on Biomedical Engineering, vol. 61, no. 2, pp. 513–521, February 2014.
T. N. Do, T. E. T. Seah, H. K. Yu, and S. J. Phee, “Development and testing of a magnetically actuated capsule endoscopy for obesity treatment,” PLoS One, vol. 11, no. 1, pp. 1–23, January 2016.
M. C. Hoang, V. H. Le, J. Kim, E. Choi, B. Kang, J. O. Park and C. S. Kim, “Untethered robotic motion and rotating blade mechanism for actively locomotive biopsy capsule endoscope,” IEEE Access, vol. 7, pp. 93364–93374, 2019.
M. C. Hoang, V. H. Le, J. Kim, E. Choi, B. Kang, J. O. Park and C. S. Kim, “A wireless tattooing capsule endoscope using external electromagnetic actuation and chemical reaction pressure,” PloS one, vol. 14, no. 7, p. e0219740, 2019.
R. Vadlapatla, E. Y. Wong, and S. G. Gayakwad, “Electronic drug delivery systems: An overview,” Journal of Drug Delivery Science and Technology, vol. 41, no. 2017, pp. 359–366, August 2017.
C. T. Dietzel, H. Richert, S. Abert, U. Merkel, M. Hippius, and A. Stallmach, “Magnetic active agent release system (MAARS): evaluation of a new way for a reproducible, externally controlled drug release into the small intestine,” Journal of Controlled Release, vol. 161, no. 3, pp. 722–727, May 2012.
P. J. van der Schaar, J. F. Dijksman, H. Broekhuizen-de Gast, J. Shimizu, N. van Lelyveld, H. Zou, V. Iordanov, C. Wanke, and P. D. Siersema, “A novel ingestible electronic drug delivery and monitoring device,” Gastrointestinal Endoscopy, vol. 78, no. 3, pp. 520–528, September 2013.
L. Kwapisz, V. Jairath, R. Khanna, and B. Feagan, “Pharmacokinetic drug evaluation of budesonide in the treatment of Crohn’s disease,” Expert Opinion on Drug Metabolism & Toxicology, vol. 13, no. 7, pp. 793–801, June 2017.
S. Miehlke, M. B. D. Acosta, G. Bouma, D. Carpio, F. Magro, T. Moreels, and C. Probert, “Oral budesonide in gastrointestinal and liver disease: a practical guide for the clinician,” Journal of Gastroenterology and Hepatology, vol. 33, no. 9, pp. 1574–1581, March 2018.
R. Gröning, H. Bensmann, and R. S. Müller, “Control of drug release from capsules using high frequency energy transmission systems,” International Journal of Pharmaceutics, vol. 364, no. 1, pp. 9–13, July 2008.
R. Groening and H. Bensmann, “High frequency controlled capsules with integrated gas producing cells,” European Journal of Pharmaceutics and Biopharmaceutics, vol. 72, no. 1, pp. 282–284, January 2009.
X. Pi, Y. Lin, K. Wei, H. Liu, G. Wang, X. Zheng, Z. Wen, and D. Li, “A novel micro-fabricated thruster for drug release in remote controlled capsule,” Sensors Actuators A. Physics, vol. 159, no. 2, pp. 227–232, March 2010.
S. H. Kim and K. Ishiyama, “Magnetic robot and manipulation for active-locomotion with targeted drug release,” IEEE/ASME Trans. on Mechatronics, vol. 19, no. 5, pp. 1651–1659, October 2014.
G. Aiello, E. De Momi, P. Völgyesi, Á. Lédeczi, and P. Valdastri, “Component based design of a drug delivery capsule robot,” Sensors Actuators, A Physics, vol. 245, pp. 180–188, May 2016.
M. C. Hoang, K. T. Nguyen, V. H. Le, J. Kim, E. Choi, B. Kang, J. O. Park, and C. S. Kim, “Independent electromagnetic field control for practical approach to actively locomotive wireless capsule endoscope,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, vol. 99, pp. 1–13, 2019.
J. S. Kim, I. H. Sung, Y. T. Kim, E. Y. Kwon, D. E. Kim, and Y. H. Jang, “Experimental investigation of frictional and viscoelastic properties of intestine for microendoscope application,” Tribology Letters, vol. 22, no. 2, pp. 143–149, May 2006.
E. Taheri, M. H. Ferdowsi, and M. Danesh, “Fuzzy greedy RRT path planning algorithm in a complex configuration space,” International Journal of Control, Automation and Systems, vol. 16, no. 6, pp. 3026–3035, 2018.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Recommended by Guest Editors Doo Yong Lee (KAIST) and Jaesoon Choi (Asan Medical Center). This research was supported by a grant of the Korea Health Technology Development R&D Project through the Korea Health Industry Development Institute (KHIDI), funded by the Ministry of Health & Welfare, Republic of Korea (grant number: HI19C0642).
Kim Tien Nguyen received his B.S. degree in mechanical engineering from the Ho Chi Minh University of Technology and Education, Ho Chi Minh City, Vietnam in 2012. He received his M.S. degree in mechanical engineering from Chonnam National University, Gwangju, Korea in 2015, where he is currently working toward a Ph.D. degree with Medical Microrobot Center (MRC). His research interests include micro-actuator/robot and micro manipulation for biomedical devices/applications.
Manh Cuong Hoang received his B.S. degree from the school of mechanical engineering at Hanoi University of Science and Technology, Vietnam, in 2016. Currently, he is a Ph.D. candidate in Chonnam National University and a researcher in Robot Research Initiative (RRI), Gwangju, Korea. His research interests are microrobot, medical robot and electromagnetic field.
Eunpyo Choi received his B.S., M.S., and Ph.D. degrees from the Department of Mechanical Engineering at Sogang University, Korea, in 2008, 2010, and 2015, respectively. He was a senior postdoctoral fellow in the Dep. of Bioengineering at University of Washington, USA. He is now an assistant professor in the School of Mechanical Engineering at Chonnam National University, Korea. His research interests are BioMEMS and micro/nanorobots for medical approaches.
Byungjeon Kang received his B.S. and M.S. degrees in mechanical engineering from the Chonnam National University, Gwangju, Korea, in 2008 and 2010, respectively, and a Ph.D. degree in biorobotics from Scuola Superiore Sant’ Anna, Pisa, Italy, in 2015. He is a senior research scientist in the Medical Microrobot Center, Chonnam National University, Gwangju, South Korea. His research interests include microactuator/robot and micro-manipulation for biomedical applications.
Jong-Oh Park received his B.S. and M.S. degrees from the department of mechanical engineering, Korea, in 1978 and 1981, respectively, and a Ph.D. in robotics from Stuttgart University, Germany, in 1987. Between 1982 and 1987, he worked as a guest researcher at the FraunhoferInstitut für Produktionstechnik und Automatisierung (FhG IPA), Germany. He also worked as a principal researcher in the Korea Institute of Science and Technology (KIST) from 1987 to 2005, and he was a director of the Microsystem Research Center at KIST from 1999 to 2005. In 2005, he moved to Chonnam National University where he is now a full professor in the School of Mechanical Engineering and a director of the Robot Research Initiative (RRI). His research interests are biomedical microrobots, medical robots, and service robots.
Chang-Sei Kim received his B.S., M.S., and Ph.D. degrees from the Dept. of Control and Mechanical Engineering at Pusan National University in 1998, the Dept. of Mechanical Design and Production Engineering at Seoul National University in 2000, and the School of Mechanical Engineering at Pusan National University in 2011, respectively. He was a Research Associate in the Dept. of Mechanical Engineering at University of Maryland College Park, USA. He is now an Assistant Professor in the School of Mechanical Engineering at Chonnam National University, Korea. His research interests are dynamics and control applications for mechanical and biomedical systems in the real world.
Rights and permissions
About this article

Cite this article
Nguyen, K.T., Hoang, M.C., Choi, E. et al. Medical Microrobot — A Drug Delivery Capsule Endoscope with Active Locomotion and Drug Release Mechanism: Proof of Concept. Int. J. Control Autom. Syst. 18, 65–75 (2020). https://doi.org/10.1007/s12555-019-0240-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-019-0240-0