
Abstract
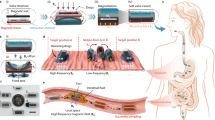
Recently, various studies on drug delivery and treatment in the gastrointestinal tract using capsule endoscopes have been conducted. In drug delivery and treatment using capsule endoscopy, along with rapid and accurate delivery, protecting the drug while the capsule moves to the lesion site is an important issue. In this paper, we propose a magnetically actuated capsule with an open-close mechanism for the delivery of multi-layer hemostatic microneedle (MN) patches, where the capsule can move to lesion sites via electromagnetic actuation. Through the proposed open-close mechanism, the capsule is closed to protect the MN patches during its locomotion state and is opened to protrude and deliver them to the lesion sites during its delivery state. The open-close mechanism of the capsule was validated through kinetic analysis and actuation tests. In addition, the hemostatic performance of the MN patch was verified through a blood clotting test and platelet adhesion test. Finally, in an ex-vivo test using a porcine small intestine, we demonstrated that the capsule with the open-close mechanism moved to target lesions and successfully delivered MN patches to the targets.
Similar content being viewed by others


References
P. V. J. Sriram, G. V. Rao, and D. Nageshwar Reddy, “Wireless capsule endoscopy: Experience in a tropical country,” Journal of Gastroenterology and Hepatology, vol. 19, no. 1, pp. 63–67 2004.
G. Iddan, G. Meron, A. Glukhovsky, and P. Swain, “Wireless capsule endoscopy,” Nature, vol. 405, no. 6785, pp. 417–417, 2000.
A. Gupta, A. J. Postgate, D. Burling, R. Ilangovan, M. Marshall, R. K. S. Phillips, S. K. Clark, and C. H. Fraser, “A prospective study of MR enterography versus capsule endoscopy for the surveillance of adult patients with Peutz-Jeghers syndrome,” American Journal of Roentgenology, vol. 195, no. 1, pp. 108–116, 2010.
S. P. Woods and T. G. Constandinou, “Wireless capsule endoscope for targeted drug delivery: Mechanics and design considerations,” IEEE Transactions on Biomedical Engineering, vol. 60, no. 4, pp. 945–953, 2012.
G. M. Cobrin, R. H. Pittman, and B. S. Lewis, “Increased diagnostic yield of small bowel tumors with capsule endoscopy,” Cancer: Interdisciplinary International Journal of the American Cancer Society, vol. 107, no. 1, pp. 22–27, 2006.
Q. Wang, K. Wolf, and D. Plettemeier, “An UWB capsule endoscope antenna design for biomedical communications,” Proc. of 3rd International Symposium on Applied Sciences in Biomedical and Communication Technologies (ISABEL 2010), IEEE, Rome, 2010.
G. Traverso, C. M. Schoellhammer, A. Schroeder, R. Maa, G. Y. Lauwers, B. E. Polat, D. G. Anderson, D. Blankschtein, and R. Langer, “Microneedles for drug delivery via the gastrointestinal tract,” Journal of Pharmaceutical Sciences, vol. 104, no. 2, pp. 362–367, 2015.
V. H. Le, H. L. Rodriguez, C. Lee, G. Go, J. Zhen, V. D. Nguyen, H. Choi, S. Y. Ko, J. O. Park, and S. Park, “A soft-magnet-based drug-delivery module for active locomotive intestinal capsule endoscopy using an electromagnetic actuation system,” Sensors and Actuators A: Physical, vol. 243, pp. 81–89, 2016.
J. Lee, H. Lee, S. Kwon, and S. Park, “Active delivery of multi-layer drug-loaded microneedle patches using magnetically driven capsule,” Medical Engineering & Physics, vol. 85, pp. 87–96, 2020.
M. S. Lord, B. Cheng, S. J. McCarthy, M. S. Jung, and J. M. Whitelock, “The modulation of platelet adhesion and activation by chitosan through plasma and extracellular matrix proteins,” Biomaterials, vol. 32, no. 28, pp. 6655–6662, 2011.
R. Imani, M. Rafienia, and S. H. Emami, “Synthesis and characterization of glutaraldehyde-based crosslinked gelatin as a local hemostat sponge in surgery: An in vitro study,” Bio-Medical Materials and Engineering, vol. 23, no. 3, pp. 211–224, 2013.
S. Y. Ong, J. Wu, S. M. Moochhala, M. H. Tan, and J. Lu, “Development of a chitosan-based wound dressing with improved hemostatic and antimicrobial properties,” Biomaterials, vol. 29, no. 32, pp. 4323–4332, 2008.
Y. F. Zhao, J. Y. Zhao, W. Z. Hu, K. Ma, Y. Chao, P. J. Sun, X. B. Fu, and H. Zhang, “Synthetic poly (vinyl alcohol)-chitosan as a new type of highly efficient hemostatic sponge with blood-triggered swelling and high biocompatibility,” Journal of Materials Chemistry B, vol. 7, no. 11, pp. 1855–1866, 2019.
Y. Hiraishi, S. Hirobe, H. Iioka, Y. S. Quan, F. Kamiyama, H. Asada, N. Okada, and S. Nakagawa, “Development of a novel therapeutic approach using a retinoic acid-loaded microneedle patch for seborrheic keratosis treatment and safety study in humans,” Journal of Controlled Release, vol. 171, no. 2, pp. 93–103, 2013.
K. Tsioris, W. K. Raja, E. M. Pritchard, B. Panilaitis, D. L. Kaplan, and F. G. Omenetto, “Fabrication of silk microneedles for controlled-release drug delivery,” Advanced Functional Materials, vol. 22, no. 2, pp. 330–335, 2012.
S. Lau, J. Fei, H. Liu, W. Chen, and R. Liu, “Multilayered pyramidal dissolving microneedle patches with flexible pedestals for improving effective drug delivery,” Journal of Controlled Release, vol. 265, pp. 113–119, 2017.
L. M. Ensign, R. Cone, and J. Hanes, “Oral drug delivery with polymeric nanoparticles: The gastrointestinal mucus barriers,” Advanced Drug Delivery Reviews, vol. 64, no. 6, pp. 557–570, 2012.
P. Feng, P. Wu, C. Gao, Y. Yang, W. Guo, W. Yang, and C. Shuai, “A multimaterial scaffold with tunable properties: Toward bone tissue repair,” Advanced Science, vol. 5, no. 6, p. 1700817, 2018.
D. I. Kim, H. Lee, S. H. Kwon, Y. J. Sung, W. K. Song, and S. Park, “Bilayer hydrogel sheet-type intraocular microrobot for drug delivery and magnetic nanoparticles retrieval,” Advanced Healthcare Materials, vol. 9, no. 13, p. 2000118, 2020.
F. Zhang, Y. Dongxu, and S. Shuan, “Design of a legged and clamper-based capsule robot with active locomotion function,” Journal of Medical Devices, vol. 15, no. 1, p. 014502, 2021.
H. Kee, H. Lee, H. Choi, and S. Park, “Analysis of drivable area and magnetic force in quadrupole electromagnetic actuation system with movable cores,” Measurement, vol. 161, p. 107878, 2020.
S. Mahmood, M. O. Schurr, and S. Schostek, “Predictive tilt compensation for robot assisted magnetic capsule endoscope,” Proc. of 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), IEEE, pp. 3697–3702, 2019.
A. Koulaouzidis and K. Alexandros, “Three-dimensional image reconstruction in capsule endoscopy,”World Journal of Gastroenterology: WJG, vol. 18, no. 31, pp. 4086–4090, 2012.
M. C. Kim, E. S. Kim, J. O. Park, E. Choi, and C. S. Kim, “Robotic localization based on planar cable robot and hall sensor array applied to magnetic capsule endoscope,” Sensors, vol. 20, no. 20, p. 5728, 2020.
V. S. Prasath, D. N. Thanh, N. Q. San, and S. Dvoenko, “Human visual system consistent model for wireless capsule endoscopy image enhancement and applications,” Pattern Recognition and Image Analysis, vol. 30, no. 3, pp. 280–287, 2020.
K. Jani, R. Srivastava, S. Srivastava, and A. Anand, “Computer aided medical image analysis for capsule endoscopy using conventional machine learning and deep learning,” Proc. of 7th International Conference on Smart Computing & Communications (ICSCC), IEEE, pp. 1–5, 2019.
H. Alaskar, A. Hussain, N. Al-Aseem, P. Liatsis, and D. Al-Jumeily, “Application of convolutional neural networks for automated ulcer detection in wireless capsule endoscopy images,” Sensors, vol. 19, no. 6, pp. 1265, 2019.
X. Jia, X. Xing, Y. Yuan, L. Xing, and M. Q. H. Meng, “Wireless capsule endoscopy: A new tool for cancer screening in the colon with deep-learning-based polyp recognition,” Proceedings of the IEEE, vol. 108, no. 1, pp. 178–197, 2019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the Korea Health Technology Development R&D Project through the Korea Health Industry Development Institute (KHIDI), funded by the Ministry of Health & Welfare, Korea (grant number: HI19C0642).
Jihun Lee received his B.S. degree from the School of Undergraduate Studies, Daegu Gyeongbuk Institute of Science & Technology, Daegu, Korea, in 2019, and he is currently researcher in the Department of Robotics Engineering at Daegu Gyeongbuk Institute of Science and Technology (DGIST), Korea. His research interests include microrobots and medical robots.
Sun Woo Sohn received her B.S. degree from Daegu Gyeongbuk Institute of Science & Technology, Korea. In 2020, she enrolled in Daegu Gyeongbuk Institute of Science and Technology (DGIST) as an integrated Master & Ph.D. student in the Department of Robotics Engineering. Her research interests include biomimetic microrobots for biomedical applications.
Hyoryong Lee received his B.S. degree in mechanical engineering from Kumoh National Institute of Technology, Korea in 2017. In 2017, he enrolled in Daegu Gyeongbuk Institute of Science and Technology (DGIST) as an integrated Master & Ph.D. student in the Department of Robotics Engineering. His research interests are microactuators and microrobots for biomedical applications.
Sukho Park earned his Master’s and Ph.D. degrees in mechanical engineering from Korea Advanced Institute of Science and Technology (KAIST), Korea, in 1995 and 2000, respectively. From 2000 to 2004, he worked as a senior research engineer at LG Electronics Production Research Center, Korea. From 2004 to 2006, he worked as a senior researcher of Microsystem Research Center in the Korea Institute of Science and Technology. From 2006 to 2016, he worked as a professor of the School of Mechanical Engineering at Chonnam National University and a section head of the Robot Research Initiative (RRI). In 2017, he moved to Daegu Gyeongbuk Institute of Science and Technology (DGIST), where he is now a full professor in the Department of Robotics Engineering. His research interests are microactuator, micro/nano robot, and micro/nano manipulation for biomedical instrumental applications.
Rights and permissions
About this article

Cite this article
Lee, J., Sohn, S.W., Lee, H. et al. Open-close Mechanism of Magnetically Actuated Capsule for Multiple Hemostatic Microneedle Patch Delivery. Int. J. Control Autom. Syst. 20, 2285–2296 (2022). https://doi.org/10.1007/s12555-021-0306-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-021-0306-7