
Abstract
This narrative review aimed to elucidate which robot-related characteristics predict relationship formation between typically-developing children and social robots in terms of closeness and trust. Moreover, we wanted to know to what extent relationship formation can be explained by children’s experiential and cognitive states during interaction with a robot. We reviewed 86 journal articles and conference proceedings published between 2000 and 2017. In terms of predictors, robots’ responsiveness and role, as well as strategic and emotional interaction between robot and child, increased closeness between the child and the robot. Findings about whether robot features predict children’s trust in robots were inconsistent. In terms of children’s experiential and cognitive states during interaction with a robot, robot characteristics and interaction styles were associated with two experiential states: engagement and enjoyment/liking. The literature hardly addressed the impact of experiential and cognitive states on closeness and trust. Comparisons of children’s interactions with robots, adults, and objects showed that robots are perceived as neither animate nor inanimate, and that they are entities with whom children will likely form social relationships. Younger children experienced more enjoyment, were less sensitive to a robot’s interaction style, and were more prone to anthropomorphic tendencies and effects than older children. Tailoring a robot’s sex to that of a child mainly appealed to boys.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent years, robots have started to enter our homes and service environments. They are no longer used only for manufacturing, but also fulfill—as social robots—roles as assistants or companions [56, 141]. Social robots are typically user-friendly: Even people without technological training can use them. One group without technological training that is particularly likely to use social robots are children [116], who already encounter social robots in school, therapy, and entertainment settings. In this context, some scholars have pointed out beneficial effects of social robots on children’s learning [e.g., 135], social behavior [e.g., 64], and emotional wellbeing [e.g., 13]. Other scholars, in contrast, have voiced concerns about possibly detrimental developmental consequences of child–robot interaction (CRI) [25], notably, with respect to the crucial developmental task of forming meaningful relationships [14]. For example, researchers have pointed out that children may be deceived about the genuineness of the child–robot relationship, which may elicit emotional or psychological damage [126]. Moreover, children may establish master–servant relationships with robots, resulting in an immoral treatment of robots that may spill over to children’s treatment of peers [56].
Despite these contrasting views on the consequences of CRI, we lack a comprehensive overview of whether and how CRI affects the formation of child–robot relationships. Moreover, systematic knowledge about the determinants and underlying processes that play a role in the establishment of child–robot relationships is missing. Multiple CRI reviews have appeared, but they are rather limited in their scope and focus, dealing with specific social robot applications in educational settings [e.g., 125, 137], autism therapy [e.g., 12, 26], or physical therapy for disabled children [e.g., 144]. Other reviews have assessed CRI only in the broader context of human–robot interaction (HRI) [25, 41, 84, 151]. Finally, one study did survey some research on child–robot relationship formation, but does not present a comprehensive, systematic review of the field [i.e., 56].
Against this background, the purpose of the present review study is to gain insight into the predictors and mechanisms of relationship formation between children and social robots. We define social robots as robots that interact with us in a personal manner, enabling us to relate to them and empathize with them [22]. The emergence of child–robot relationships will be assessed through two concepts that are central to relationship formation: closeness and trust [16]. Closeness represents a feeling of connectedness or intimacy that could potentially result in the development of a friendship [131]. Trust comprises the expectancy that another person will keep his/her word or promises [113], as well as the reliance on another person’s knowledge and intent [74]. As previous studies tend to investigate the development of child–robot relationships often idiosyncratically, it seems worthwhile to organize the research by integrating individual findings into an overarching framework. We will also supplement our review with a methodological comparison of the studies, in order to provide crucial insights into the internal and external validity of findings.
2 Overarching Framework
The present review organizes studies that are relevant to the topic of child–robot relationship formation along the lines of the Stimulus–Organism–Response (S–O–R) paradigm [51]. This paradigm posits that the influence of external events (i.e., stimuli), or more generally predictors, on outcome variables (i.e., responses) is mediated by internal states (i.e., of the organism) [91]. The paradigm forms the basis of existing models in HRI [i.e., 66, 77, 80]. These models all contain outcome variables that are relevant to relationship formation, such as trust and relationship satisfaction [66], as well as social attraction [77, 80]. Moreover, each of the existing HRI models incorporates robot characteristics as predictors, for example the robot’s personality [80], its physical versus virtual embodiment [77], or the robot’s role during the interaction [66]. Finally, all HRI models assume robot characteristics to elicit specific internal states, such as social presence, which are thought to mediate the influence of robot characteristics on the outcome variables.
The S–O–R paradigm thus seems to be a suitable heuristic to organize the literature in this review: ‘S’ represents the predictors of child–robot relationship formation, ‘O’ stands for potential mediators, and ‘R’ for the focal outcome variables, closeness and trust. Because our focus limits the relevant outcome variables to trust and closeness, we will center on the assessment of variables belonging to the ‘S’ and ‘O’ parts of the model and their role in explaining trust and closeness. As the field of HRI research is still evolving and methodologically heterogeneous [11], a quantitative meta-analysis seems currently premature [107]. Therefore, we abstain from reporting effect sizes and statistical analyses. The S–O–R model thus presents a conceptual tool to structure current knowledge about child–robot relationship formation rather than a statistical model to be tested.
Although not concerned with statistical testing, we do classify relevant variables in the literature into predictors, mediators, and outcomes. This quantitative terminology not only helps us to adequately represent the reviewed research, of which a large part is quantitative, but also aids us to structure the results of the narrative review transparently.
2.1 Predictors of Child–Robot Relationship Formation
Previous research has focused on the examination of two dimensions in HRI: robot characteristics (i.e., robots’ character, physical capacities, and behavior) and interaction styles (i.e., the content of robots’ contributions to the interaction) [24]. Several of these characteristics and styles are omnipresent in studies both on HRI and on interpersonal relationships, and may also be expected to play a role in CRI. Therefore, they will guide our discussion of the predictors of child–robot relationship formation.
Dautenhahn [33] mentions four robot characteristics that are conducive to the formation of human–robot relationships. First, a companion robot should be tailorable to its user in terms of appearance and behavior. This is in line with the finding that children form relationships with individuals who are similar to themselves, both in terms of appearance and behavior [e.g., 16, 32, 43, 48, 100]. Positive effects of both types of similarity have also been found in CRI studies [27, 44].
Second, a robot’s functionality should be tailorable to match the user’s preferences, and allow for an expansion of the robot’s range of skills over time. This capacity has been confirmed to encourage human–robot social bonding [79]. Third, robots should adopt a humanlike rather than machinelike role and interact accordingly. Krämer et al. [72] acknowledge the importance of humanlike behavior, but argue that more specific roles should be determined based on the users’ perception.
Fourth and finally, companion robots need to possess social skills, which allow for socially interactive behavior and are essential to long-term robot acceptance. General [e.g., 16, 40, 45] as well as child-oriented [e.g., 32, 100] research on interpersonal relationship formation has pointed to the importance of two specific social skills: responsiveness and expressiveness. HRI studies have confirmed the relevance of these skills to the establishment of human–robot relationships [e.g., 19, 92]. Responsiveness refers to the probability that an interaction partner will (appropriately) respond to the other’s communicative behaviors [34]. Expressiveness consists of an emotional and a social dimension [110]: Emotional expressiveness refers to the ability to express emotions, attitudes, and interpersonal orientation cues spontaneously and accurately. Social expressiveness captures general speaking skills and the ability to engage interaction partners. Both responsiveness and expressiveness apply to verbal and nonverbal behavior [34, 110].
In addition to the abovementioned characteristics, the literature has devoted major attention to the influences that different types of robot embodiment have [e.g., 63, 87]. Therefore, we add embodiment as a final robot characteristic. Embodiment can be defined as referring to “the fact that a particular agent is realized as a physical robot or as a simulated agent” [108, p. 649]. In sum, we will focus on six robot characteristics: (a) responsiveness; (b) expressiveness; (c) tailoring of appearance and behavior; (d) tailoring of functionality; (e) role; and (f) embodiment.
As for the second crucial dimension in HRI research—interaction styles—it is conceivable that at least three types of interaction influence the process of relationship formation. First, relationships benefit from a development of routine interaction into strategic interaction, which aims at advancing a relationship (e.g., through self-disclosure of increasing depth and breadth) [16, 84]. Second, the expression of emotions is essential to the emergence of closeness and trust [15, 16, 146]. Therefore, emotional interaction is crucial for the development of a relationship. Third, the development of relationships requires time. Accordingly, memory-based interaction referring to shared knowledge and events in the past plays an important role in relationship formation [16], and, in our view, deserves to be treated as an interaction style of its own.
2.2 Mediators of Child–Robot Relationship Formation
Several recent CRI studies have dealt with mechanisms that may explain the development of child–robot relationships [e.g., 28, 50]. In line with the S–O–R paradigm, their findings indicate that the emergence of closeness and trust may be mediated by internal states. Two categories of psychological processes can be differentiated, experiential and cognitive ones [e.g., 38]. Accordingly, we differentiate between experiential and cognitive states (for a broader categorization, see e.g., [143]). In the context of CRI, experiential states refer to how children experience, appreciate, and affectively respond to a robot and the interaction with it. Cognitive states refer to children’s perceptions of, and thinking about, a robot during and after their interaction with it. We distinguished cognitive states from experiential rather than from emotional states because the category of experiential states [52] as well as the juxtaposition of experiential and cognitive processes have been established in the literature (see also, in the context of organizational learning, [42]; in the context of psychotherapy, [94]). From a pragmatic perspective, this distinction allowed us to summarize a broader set of psychological responses into one category.
To date, the mediating role of experiential and cognitive states has not been explicitly theorized and investigated in research on the consequences of CRI. However, both experiential and cognitive states are likely to mediate the consequences of children’s interaction with a robot. In each of the aforementioned HRI models, for example, a cognitive state that occurs is social presence [66, 77, 80]. Social presence is a psychological state that applies when “technology users do not notice […] the artificiality of simulated nonhuman social actors” [76, p. 45]. The consistent occurrence of social presence in each of the HRI models points to the relevance of this, and probably also other, cognitive states to HRI in general and to CRI in particular.
Similarly, experiential states can be expected to influence CRI. Generally, affective experiences play a primary role in the development and maintenance of interpersonal relationships (for an overview, see [16], pp. 141–142). Moreover, experiential states are intrinsically rewarding, such that positive subjective experiences induce a desire for repetition [75]. As the development of a relationship by definition requires time, children’s subjective experiences of (repeated) robot encounters are thus likely related to the emergence of child–robot relationships. Against this background, we aim to determine to what extent experiential and cognitive states occur during CRI, how various robot characteristics and interaction styles influence their manifestation, and how experiential and cognitive states relate to closeness and trust.
In sum, we reviewed CRI research on predictors and mediators of child–robot relationship formation in terms of closeness and trust. Specifically, we posed the following research questions: First, we asked which robot characteristics and interaction styles influence closeness and trust. Our second question was whether robot characteristics and interaction styles affect relevant internal states. Third, we asked to what extent internal states elicit closeness and trust. Thus, we aimed to find out whether in the literature there is evidence that internal states may mediate initial influences of robot characteristics and interaction styles on closeness and trust. Because certain concerns regarding the emergence of child–robot relationships are based on robots’ hybrid ontological status [56], our fourth research question asked how children’s interaction with robots differs from their interaction with humans and objects. Fifth, given the importance of biological sex and children’s developmental status for relationship formation [16, 32], we asked to what extent these user characteristics (i.e., children’s age and biological sex) influence closeness, trust, and internal states, as well as the effects of predictors on each of these variables.
2.3 Methodological Characteristics of CRI Research
To date, little is known about the distribution of specific methodological characteristics in CRI research. As a result, the methodological practices and standards in CRI research remain unclear. To judge the internal validity of studies it is necessary to assess their design (i.e., experimental vs. correlational) and general approach (i.e., quantitative vs. qualitative). In correlational research, internal validity is influenced by the time-frame that is investigated. Longitudinal studies generally lend themselves somewhat more to causal interpretations than cross-sectional studies. Finally, the generalizability of the results of the studies depends on their external validity and the composition of their study samples. Therefore, we reported on studies’ (a) design; (b) quantitative or qualitative approach; (c) their cross-sectional or longitudinal character; and (d) sample composition and size.
The aforementioned four characteristics all relate to studies’ more general methodological setup. However, we also know little about specific methodological characteristics of CRI studies, although they may affect both internal and ecological validity (i.e., the generalizability of scientific findings to a societal context). The first two specific methodological characteristics that we will assess refer to the setting of a study in terms of its physical environment (e.g., lab vs. child’s everyday environment) and interaction setting (e.g., individual vs. group interaction). Information about these characteristics is important because both the suitability of the environment and the number of interaction partners affect the likelihood of a child–robot relationship to emerge [40].
A third important specific methodological characteristic is what kind of robot a study uses. As the similarity of both appearance and behavior of interlocutors plays a role in human relationship formation [16], the type of robot likely also influences the formation of child–robot relationships. Similar to Fong [41], we distinguished between anthropomorphic, zoomorphic, caricatured, and functional robots. Fourth and finally, the manner in which a robot is controlled may affect its responsiveness, and thus also the emergence of a child–robot relationship. Many studies rely upon a Wizard of Oz (WOZ) setup. While this setup enables the robot to adequately respond to specific child behaviors [109], it lacks ecological validity. In sum, we thus also reported on studies’ (a) location; (b) interaction setting; (c) robot morphology; and (d) manner of robot control.
3 Method
3.1 Database Search
Because CRI is an interdisciplinary field of research, we consulted multiple databases to identify studies relevant to the review: Web of Science (SSCI database), PsycINFO, IEEE Xplore, and ACM DL. In all databases, we searched for both journal articles and conference proceedings. Conference proceedings were included because CRI studies are often published in this format [11, 124]. As limitations in robots’ interactive capacities were overcome only starting in the 2000s [93], we reviewed only studies published between 2000 and 2017. Moreover, to ensure both the comparability within our sample and the generalizability of our findings, we focused only on research with typically-developing (TD) children. Whereas it would theoretically be interesting to compare research with TD children and children with Autism Spectrum Disorder, this was beyond the scope of the present study. Our search and review processes followed the applicable guidelines of the PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) statement (i.e., recommendations with respect to the search and selection process and the reporting of eligibility criteria and information sources) [97].
In Web of Science, we searched topic (i.e., title, abstract, author keywords, and keywords plus) with the search string (child* AND robot* NOT autism NOT *surgery NOT *operative NOT palsy), thus excluding research topics irrelevant to the present study. The same search string was used in IEEE Xplore to search in metadata only (i.e., title, abstract, and indexing terms). All publishers were selected except for AGU and BIAI because these two relate to geoscience and aerospace. In PsycINFO, we used the search string (child*.ab,id,ti. AND robot*.ab,id,ti. NOT autism.ab,id,ti. NOT surgery.ab,id,ti. NOT operative.ab,id,ti. NOT palsy.ab,id,ti.), which searches the fields title, abstract, and key concepts. The asterisks before surgery and operative were removed as left truncation is unavailable in PsycINFO. The same applies to the database ACM DL, where we only searched in abstract as only one field could be selected simultaneously. Our search syntax was (+child* +AND +robot* −autism −AND −surgery −AND −operative −AND −palsy). Search results were limited to ACM publications. In total, 1865 records were found, which were all English-language publications.
3.2 Screening Process
In a first round of screening, we consulted titles and abstracts to ensure that records were related to CRI. In the case of insufficient information in the abstract, we consulted the corresponding full-text document. We excluded records that did not deal with CRI, or did deal with CRI but studied (a) individuals with physical or mental disabilities; (b) children building, programming, or controlling robots; (c) technological rather than interactive aspects of CRI; (d) CRI from a theoretical perspective; (e) interaction with physically disembodied agents only; (f) children’s observation and perception of robots rather than their interaction with them; and (g) human–human communication via telepresence robots, with participants being aware of their human interaction partner. The exclusion of studies on interactions with only physically disembodied agents (i.e., virtual robots) adds to the comparability of our sample, because the physical presence of robots strongly influences people’s responses [63, 87]. Finally, we excluded review studies, records consisting of uninformative materials, and records that occurred twice within or across databases.
After this first round, we once more screened the remaining records based on title and abstract. We opted for a two-step screening process rather than for a database search with more specific search terms in order to ensure that possibly relevant records were not missed. In the second round, we narrowed our sample to records that dealt with closeness (or similar concepts such as ‘connectedness’ or ‘intimacy’), trust, and relevant internal states. In addition to studies that specifically refer to these concepts, we included studies on attitudes or behaviors related to closeness, such as children’s self-disclosure and empathic behaviors. Likewise, we included studies on trust-related concepts such as reliance and compliance. We included all internal states that occurred in studies that specifically investigated closeness and trust or the just mentioned related concepts.
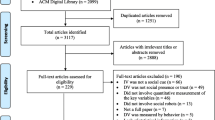
In the second round of screening, we excluded studies with robots that do not possess humanlike interaction capacities and/or humanlike appearance features. Rather than only including humanoid robots, we thus included all studies using robots that could be argued to have humanlike features. This decision was made to ensure comparability within the sample. That is, it would make little sense to compare relationship formation with humanlike and purely zoomorphic or mechanical robots. The criterion of human likeness is unrelated to the robot characteristic of role (see Sect. 2.1), which more specifically refers to a robot’s role as, for instance, a peer or teacher. Figure 1 shows an information flow chart of the screening process, which was adapted from the template diagram provided in the PRISMA statement [97]. The diagram visualizes the procedure as described above, and specifies numbers of exclusion for each step.

Flow chart of screening process (adapted from PRISMA template)
3.3 Interrater Agreement
A second rater decided for 165 records, which were randomly selected from the original sample, whether they should appear in our final sample. The interrater agreement was 98%, and subsequent discussion of the remaining 2% led to agreement upon the first rater’s decisions. As depicted in Fig. 1, the sample was further narrowed down to 86 records that were all published between 2004 and 2017 upon reading the full-text documents.
4 Results
4.1 Methodological Characteristics of the Sample
We found 57 quantitative studies and nine qualitative ones. The remaining 20 studies used mixed methods. There were 58 experimental and 28 correlational studies. Sixty studies had a cross-sectional character, 24 studies adopted a longitudinal approach, and two compared single encounters with repeated interactions. Sample sizes ranged from one to 264 participants (M = 41.44, Mdn = 27, SD = 44.28; numbers of participants after exclusion from analyses). All studies relied on convenience samples, which in 48 studies consisted (mainly) of schoolchildren. Of the remaining samples, seven relied on hospital patients and/or children from their social networks; nine on camp, event, or museum visitors; seven on volunteers recruited via flyers, subject pools, bulletin boards, or mailing lists; one on relatives; and one on acquaintances of the researchers. The composition of the remaining 13 samples was unclear. “Appendix 1” provides an overview of the participating children’s age as reported in the studies. In case no age range or mean age was provided, we reported children’s school grade. In most studies (N = 67), the age range of the participant sample (partly) fell within the middle childhood age range (i.e., 6–12 years old) [32]. As the reporting of age was heterogeneous, summary statistics could not be calculated.
In terms of location, 41 studies were conducted in a school environment, 14 in a laboratory, and five in hospital settings. The remaining studies took place at various locations (three at museums, two each at camps or play centers, and one each at a university, science fair, chess club, homelike studio environment, or at home). Additionally, three studies used varying settings (switching between home, camp, and/or hospital). Eleven studies did not specify the location. With respect to interactive settings, 69 studies established individual CRI, eight investigated group interactions, and nine relied upon a combination of both. In 64 studies, children interacted with an anthropomorphic robot (see “Appendix 1”). In 40 cases, the anthropomorphic robot used was the Nao robot (or its torso-only version). No studies used functional robots. As for controlling the robot, 53 studies relied either fully or partially on a WOZ setup, whereas in 24 cases a robot operated fully autonomously. Furthermore, three studies compared autonomous behavior and WOZ control. The remaining six were unclear about the robots’ functioning.
In sum, (a) the literature primarily took a quantitative approach; (b) cross-sectional studies (70%) predominated over longitudinal ones; and (c) 67% of the sample adopted an experimental design. (d) About half (48%) of the studies took place in a school environment; (e) 56% of the participant samples consisted of schoolchildren; and (f) in 78% of the studies, participant samples consisted partly or fully of children in middle childhood. Finally, the vast majority of studies (g) investigated dyadic CRI (80%); (h) used an anthropomorphic robot (74%); and (i) relied upon a WOZ setup (62%).
4.2 Effects of Predictors on Closeness and Trust
Our presentation of substantive results will focus on providing an overview of general patterns as well as inconsistencies in the findings of CRI research. It should be noted that, in terms of robot characteristics, tailoring of functionality received minimal attention in the literature reviewed. Therefore, we will include a single predictor ‘tailoring’ that refers to the adaptation of either behavior, appearance, or functionality. Figure 2 provides an overview of the key concepts of this review that we detected in the literature, and how they conceptually relate to our organizational model. “Appendix 2” (see electronic supplementary materials) provides a detailed overview of the concepts assessed in the reviewed studies. In case a conceptual definition was provided, we followed the authors’ interpretation. If not, we relied upon our own interpretation of the available information in each study. We checked, for seven articles, whether a second rater considered them to cover the same concepts as the first rater. Interrater agreement was 85%. Remaining disagreements were resolved through subsequent discussion.

Predictors, mediators, and outcome variables
Our first research question was which robot characteristics and interaction styles directly influence closeness and trust. In terms of robot characteristics, a robot’s increased responsiveness tended to stimulate closeness between a child and a robot [4, 88] as well as children’s trust in a robot [23, 49]. Additionally, a robot’s expressiveness generally seemed important to closeness [105, 115, 150], whereas adjusting a robot’s degree of expressiveness did not further increase closeness [65, 70]. Conclusions with respect to influences of tailoring a robot to a child on closeness were inconsistent [1, 28, 99]. In contrast, robots that were presented or perceived in the role of a younger creature with fewer capabilities than the child itself fostered a child’s closeness with the robot [28, 71, 88, 98, 134, 142]. Moreover, closeness equally seemed to be related to the roles assigned to children themselves [31]. Finally, a child’s physical interaction with a robot, rather than embodiment as a feature in itself, seemed to influence closeness [50, 54, 70]. A robot’s embodiment did not influence children’s trust [61, 89].
In general, the effects of robot characteristics on trust were less frequently assessed than the effects of robot characteristics on closeness. Therefore, no valid generalizations can at this point be made regarding the direct influences of robot characteristics on trust. The same holds with respect to the influences of interaction styles on both closeness and trust. Nevertheless, the literature points to a positive association between emotional [4, 88, 136] as well as strategic interaction (albeit less consistently) [4, 5, 20, 21, 57, 59, 60, 73, 81, 127] and closeness between children and robots. Children’s trust in a robot was unaffected by emotional interaction [62, 136] and repeated memory-based interaction [82].
In sum, primarily (a) responsiveness; (b) role; (c) strategic interaction; and (d) emotional interaction elicited feelings of closeness. Responsiveness also seemed to foster trust. Associations between other robot characteristics and interaction styles and trust remained unclear.
4.3 Effects of Predictors on Internal States
Our second research question asked whether robot characteristics and interaction styles would influence children’s internal states. In the studies surveyed, three experiential and three cognitive states could be distinguished (see Fig. 2).
4.3.1 Experiential States
Experiential states encompassed (a) engagement; (b) enjoyment and liking; and (c) affect. Engagement can be defined as “active involvement, commitment, and concentrated attention, in contrast to superficial participation, apathy, or lack of interest” [101, p. 11]. Enjoyment and liking refer to children’s positive, pleasant experiences during interaction with a robot. Several studies more specifically addressed children’s emotional responses in terms of affective valence and arousal, which we will therefore discuss separately. While engagement taps into cognitive processes, it is closely related also to enjoyment, appreciation, and affect [148]: Together, these responses constitute one’s general experience of a situation. We, therefore, categorized engagement as an experiential rather than as a cognitive state.
As to the impact of robot characteristics on experiential states, robots’ responsiveness [23, 61, 67, 95, 106, 119, 130, 133, 139] and tailoring [2, 7, 90, 114, 117, 129] primarily seemed to foster children’s engagement. When responsiveness was kept constant, the mode of controlling a robot neither influenced engagement [35] nor enjoyment [140]. While qualitative findings indicate that role was associated with engagement [28, 98, 111], quantitative findings were inconsistent [36, 96, 104]. Embodiment increased observed engagement [61, 89] unless the interaction was more task-oriented [70, 138]. In addition, embodiment positively affected enjoyment and liking [55, 70, 89]. Furthermore, adding a second robot to an interaction seems to positively influence engagement [145] as well as self-reported enjoyment [132].
The effects of expressiveness on experiential states seemed to depend upon the type of expressiveness [62, 68, 115, 128]. In general, robot characteristics had minor or inconsistent influences on children’s affect [69, 104, 106, 115, 118, 128, 147]. With respect to the effects of interaction styles on experiential states, strategic interaction seemed to stimulate engagement [20, 21, 57, 73, 88, 103, 127], as well as enjoyment and liking [20, 47, 60], while emotional and memory-based interaction were positively associated with engagement [2, 4, 29, 53, 82]. Some positive effects of strategic [81, 86] and emotional [21, 78, 136] interaction on affect were also reported. However, a robot’s memory for information that it was not supposed to know caused negative emotional reactions among children [83]. In the long term, combining or expanding interaction styles seemed beneficial to engagement [58, 59, 82].
In sum, all predictors seem to some extent related to (a) engagement, and some were also associated with (b) enjoyment and liking. The effects of predictors on (c) affect were scarce and/or inconsistent.
4.3.2 Cognitive States
In the literature reviewed, cognitive states comprised (a) anthropomorphism; (b) social presence; and (c) perceived empathy and support (of the robot toward the child). Anthropomorphism denotes the “attribution of a human form, human characteristics, or human behavior to nonhuman things such as robots […]” [8, p. 74]. Perceived empathy and support were considered cognitive states [as in other categorizations, e.g., 143] as studies generally emphasized their cognitive perception rather than affective experience. As opposed to the more general experiential states that we identified, these cognitive states constitute more specific responses to particular aspects of a situation.
While a robot’s responsiveness tended to foster anthropomorphism ([106] for intelligence; [147] for humanness, but not for intelligence) and perceived support [49, 106], children still considered an unresponsive robot a social agent [10]. Mixed effects of various types of expressiveness on anthropomorphism [6, 70] as well as perceived empathy and support were reported [37, 62]. Effects of tailoring [81, 118] and embodiment [70, 89] on anthropomorphism and social presence were scattered, while a robot’s role was qualitatively related to anthropomorphism [28, 71, 142]. Although strategic and emotional interaction and cognitive states seemed to be associated [3, 57, 59, 81], no clear patterns were detected. However, memory-based interaction seemed to foster anthropomorphism [86, 112]. Unless children’s companionship expectations of a robot were violated [85], social presence remained constant over time across interaction styles [3, 82, 127].
In sum, the effects of predictors on cognitive states were rather inconsistent. However, (a) anthropomorphism as well as (b) perceived empathy and support seemed to be associated with several predictors.
4.4 Effects of Internal States on Closeness and Trust
Our third research question concerned the extent to which cognitive and experiential states elicit closeness and trust. Only one study in the reviewed literature explicitly investigated this impact, reporting a positive correlation between children’s engagement and their motivation to develop a friendly relationship to a robot [59].
In order to see whether the reviewed literature may provide circumstantial evidence of the influence of internal states on closeness and trust, we checked whether a high level of a certain state was consistently accompanied by a high level of closeness or trust. In that case, indirect evidence would exist that the internal state in question and the outcome may be associated. However, for neither experiential nor cognitive states did we find consistent results. For example, evidence emerged that when children were highly engaged, they also tended to feel close to a robot [28, 54, 133]. Accordingly, when children’s engagement in robot interaction did not vary, their closeness or trust in the robot also remained unchanged [82, 112]. However, other studies report variations in engagement but not in closeness [73, 145] or trust [61, 89]. Conversely, yet others found engagement to remain constant while closeness or trust varied [50, 55]. Thus, a consistent association between engagement, and closeness and trust did not seem to exist. Overall, no firm conclusions can currently be drawn about the relationship between internal states and closeness and trust.
In sum, both direct and indirect evidence of associations between internal states and (a) closeness and (b) trust were lacking.
4.5 Differences in Children’s Interaction with Humans, Robots, and Objects
Our fourth research question asked how children’s interactions with robots differ from their interactions with humans and objects. Children’s closeness to robots seems to lie somewhere between their closeness to humans and inanimate objects [123, 133]. In addition, their interpersonal distancing in response to a robot was different than in response to a human [30]. Children trusted humans more than robots in some contexts, whereas in other situations their trust in robots was greater than, or did not differ from, their trust in humans [17, 18, 120, 123]. Findings for engagement were inconsistent [112, 120, 149], but children enjoyed an interaction more when they interacted with a friend than when they interacted with a robot [122, 123]. However, regardless of whether they interacted with a robot or with an adult, children felt equally comfortable and experienced similar levels of enjoyment [17, 149]. Both enjoyment and affect were more positive in the presence of a robot than when a child was playing on its own [121,122,123]. The social presence of a human was higher than the social presence of his identical robotic counterpart [102], and children more convincingly categorized a robot as ‘human’ when comparing it to a machine than when comparing it to a toy [46].
In sum, (a) children’s trust in humans, robots and objects depended on how trust was operationalized, while (b) closeness and (c) enjoyment were greater in the presence of friends as compared to robots. Playing with robots evoked greater (d) closeness and (e) enjoyment, as well as (f) more positive affect, than solitary play or playing with inanimate objects.
4.6 Influences of User Characteristics
Our fifth and final research question asked to what extent children’s age and biological sex influence closeness, trust, and internal states, as well as the effects of predictors on each of these variables. As to the effects of predictors, three patterns stood out. First, children in middle childhood (i.e., 6–12 years old) seemed to be more critical of, and sensitive to, a robot’s interaction style than children in early childhood (i.e., 2–6 years old [32]) [83, 86, 104]. Second, children’s tendency to anthropomorphize, as well as influences of anthropomorphic robot features on engagement, seemed to decrease with children’s age [57, 104]. Third, tailoring a robot’s sex to that of the child was associated with more positive experiential states among boys [70, 90, 117]. In terms of internal states, three studies consistently found enjoyment to be higher in 8-year-olds than in 12-year-olds [121,122,123]. Findings with respect to age-related differences in engagement were inconsistent [9, 20, 58, 85, 90, 95, 104, 129, 132, 145]. No generalizations could be made with respect to influences of age and biological sex on closeness and trust.
In sum, no consistent effects of user characteristics on (a) closeness and (b) trust could be disentangled. However, age seemed to be (c) positively related to sensitivity to interaction styles, but negatively related to both (d) anthropomorphic tendencies and effects and (e) experienced enjoyment. (f) Tailoring a robot’s sex to that of the child positively affected boys’ but not girls’ experiential states.
5 Discussion
This study reviewed the CRI literature in terms of predictors and underlying processes of relationship formation between children and social robots. Specifically, we aimed to determine, first, which robot characteristics and interaction styles influence closeness and trust; second, whether these same categories of predictors impact children’s internal states during CRI; third, to what extent internal states may influence closeness and trust; fourth, how children’s interaction with robots differs from their interaction with humans and objects; and fifth, to what extent children’s age and gender influence closeness, trust, and internal states, as well as the effects of predictors on each of these variables.
5.1 Influences of Robot Characteristics and Interaction Styles on Closeness and Trust
Robot characteristics, notably responsiveness and role, as well as strategic and emotional interaction styles, were associated with children’s feelings of greater closeness with a robot. Responsiveness was also related to children’s trust in a robot. However, it remained unclear to what extent other robot characteristics and interaction styles are related to trust. The found influences of responsiveness, role, and strategic and emotional interaction on closeness may be related to four specificities of current CRI research.
First, as technological possibilities in CRI are still somewhat limited, our findings may be influenced by the fact that some robot features can currently better be operationalized than others. The relatively distinct influences of these features may thus partly be explained by their relatively easy operationalization. For instance, a robot’s role can explicitly be claimed by the researcher, or even automatically assumed by children, and hence does not require any technical implementation. In contrast, current robots, at least those that can be used in research with children, may still lack the sophistication to emulate differences in facial, vocal, and gestural expressiveness validly—an idea that is supported by the finding that children preferred a robot to be less expressive in case expressiveness hindered intelligibility [62].
Second, particularly in the context of CRI, salient and unambiguous robot features, such as responsiveness and role, may be more effective than non-salient and ambiguous robot features, which run the risk of being differently perceived and interpreted by children. For instance, the impact of tailoring a robot to a child depends on whether the child is able to notice its own similarity to the robot. The immediate intelligibility of robot features for children may also explain why strategic and emotional interaction were more clearly related to closeness than was memory-based interaction. After all, children may interpret a robot’s capacity to recall previous interactions as a sign of technological advancement (for an illustration, see [2]). Conversely, children may associate strategic and emotional interaction more readily with a robot’s social nature.
Third, some predictors are more central in relationship formation than others, which may reflect in our findings. Responsiveness, in particular, constitutes a social skill that plays a pivotal role in the development of social relationships [e.g., 16]. It thus presents a necessary characteristic when studying children’s relationship formation with social robots and it would be surprising not to find an influence of it. Our finding that the absence of expressiveness hinders closeness indirectly supports this observation as expressiveness is also of major importance to relationship formation [e.g., 16].
Fourth, effects of memory-based interaction seem to be age-dependent [83, 86], which may present an alternative explanation for the finding that memory-based interaction was less clearly related to closeness than strategic and emotional interaction. This alternative explanation is supported by the finding that children’s perceptions of robots as mental, social, and moral others differed between age groups [57]. These differences in perception may influence children’s expectations of their interaction with a robot (see [104] for an illustration), as our categorizations and expectations of others are inherently linked [56]. Yet the interpretation of developmental differences demands caution [57], and future research is needed to clarify their nature.
In sum, closeness between children and robots seems primarily triggered by robot characteristics and interaction styles that do not require the implementation of advanced technologies; can be easily perceived and understood by children; and therefore clearly capture the social character of social robots. For children to feel close to a robot, the sociality of robots needs to be tangible and accessible during the interaction with a social robot.
5.2 Influences of Robot Characteristics and Interaction Styles on Internal States
All robot characteristics and all interaction styles seemed to some extent associated with experiential states in terms of children’s engagement and/or enjoyment and liking of robots as well as CRI in general. The fact that CRI can create experiences that are engaging and enjoyable for children confirms the potential of robots to figure as social actors. Reported influences of predictors, particularly robot characteristics, on affect were few and sometimes ambiguous. The inconsistent results may partly be due to current technological limitations in validly operationalizing characteristics and interaction styles that may elicit affective reactions. At the same time, the question of how children react affectively to interaction with robots also needs more systematic research attention than it currently received.
The effects of robot characteristics and interaction styles on cognitive states were less consistent than the effects on experiential states. One explanation may be that cognitive states are more complex and demanding than engagement and enjoyment. Still, several predictors were in some way associated with intricate cognitive states. Notably, anthropomorphism and perceived empathy and support tended to be related to multiple predictors. This result indicates that children’s perception of a robot as a social, humanlike being may influence the formation of child–robot relationships. Overall, the finding that robot characteristics and interaction styles influence engagement and enjoyment more consistently than affect and cognitive states may indicate that, for children to form social relationships to robots, the interaction with a robot should first and foremost be engaging and enjoyable.
5.3 Influences of Internal States on Closeness and Trust
Virtually no research about the impact of internal states during CRI on children’s closeness and trust toward a robot has been conducted to date. If anything, studies occurred in the broader context of HRI rather than CRI. Nearly all studies have focused on robot-related variables because they currently present the core of research on social robots. Moreover, given that social robotics, and notably CRI, is an emerging field of research, studies primarily focus on children’s direct responses to robot-related variables. Consequently, questions on the processes that underlie potential relations between robot-related variables and children’s closeness with, and trust in, robots have not yet received much attention, neither theoretically nor empirically. Our model for organizing the literature may present a first step toward studying relationship formation and its underlying processes in CRI.
5.4 Children’s Interaction with Humans, Robots, and Objects
The literature suggested that children’s differential trust in adults and robots depends on the operationalization of trust. Children felt closer to friends than to robots and enjoyed being with friends more. However, closeness, enjoyment, and affect were still more positive in the presence of a robot than when children were either alone or playing with ‘inanimate objects.’ These findings dovetail with the idea that robots constitute a hybrid ontological category [56], somewhere between the animate and the inanimate. More generally, the results confirm the notion that robots are social entities with whom children are likely to form social relationships.
5.5 Influences of User Characteristics
Children’s sensitivity to a robot’s interaction style seems to increase with age, while anthropomorphic tendencies and effects follow an opposite pattern. Likewise, enjoyment seems to decrease with age, but the influence of age on engagement remains unclear.
As to children’s biological sex, tailoring a robot’s sex to that of the child mainly appealed to boys. Whereas the literature regularly addressed age and biological sex differences in study outcomes, no studies checked for their moderation effects.
5.6 Critical Evaluation of the Field
The lack of consistent patterns arising from our review and the scarcity of firm conclusions that can be drawn partly reflect the still emerging status of the field of CRI research. Although the reviewed literature provided us with many new insights, the formation of child–robot relationships is often studied idiosyncratically, with a lack of established theoretical frameworks, and with incomparable conceptualizations and operationalizations of key concepts. In this context, and in agreement with the issues that Eyssel has raised for research on HRI [39], three methodological and four more substantive shortcomings stand out.
In terms of methodological shortcomings, many studies adopted, first, a correlational design. As a consequence, the internal validity of the studies is limited. The correlational design of the studies is less of a problem for the causal direction between particular robot-related variables and closeness and trust because only one causal direction is possible (i.e., from robot characteristics to closeness and trust). However, with correlational designs we still lack rigorous knowledge of whether it is only the focal robot-related variable that causes changes in closeness and trust, whether unknown confounders produce the effects, or whether the focal variables interact with other unknown variables.
Second, there is a need for moderator-effect studies that clarify how user characteristics such as children’s age and biological sex moderate the effects of predictors on outcome variables. Such studies would be valuable in going beyond the mere description of sample characteristics and corresponding differential outcomes to discover systematic influences of these characteristics. Third, the reporting of methodological and statistical information varies in terms of both scope and detail, which makes it difficult to resolve, or understand, inconsistencies across studies. This shortcoming may partly be due to the fact that findings are often published as conference proceedings, which allow researchers only limited space to present their findings (see [11] for an overview of reporting issues and recommendations in HRI conference papers).
In terms of substantive shortcomings, first, rigorous and valid conceptualizations of closeness, trust, and internal states are often missing. Notably, studies differ in their conceptualizations of engagement and enjoyment, which points to variations in scholars’ understanding of the terminology and impairs the comparability of the studies. Second, closeness, trust, and internal states are frequently measured by observing behaviors whose relationship to the respective concept is not unequivocal. As a result, the interpretation of observational cues varies. For instance, smiling has been treated as an indication of engagement [e.g., 119], enjoyment [e.g., 136], and social presence [e.g., 69]. This variation in the interpretation of behaviors is not surprising given the numerous possible interpretations of a particular behavior depending on the context in which it occurs. However, when contextual information is not provided, it becomes difficult to compare findings and to draw general conclusions.
Third, self-report and observational measures often lead to different outcomes (for an illustration, see [115]), which further adds to the confusion as to whether contradictory findings, both within and between studies, are indeed incompatible. Fourth and finally, many studies report ceiling effects that may reflect a social desirability bias [98, 118]. These ceiling effects are often interpreted as an indication of children’s meaningfully positive evaluation of the robot or their interaction with it, without considering alternative methodological explanations.
5.7 Directions for Future Research
Given the various aforementioned challenges research on CRI has to face, and reflecting earlier recommendations for improving research on HRI [11, 39], several directions for future research are conceivable. First, clear definitions of relevant concepts need to be developed and coherently applied. This will reduce between-study variations in conceptualizations and operationalizations and increase the comparability of the findings, which is an essential prerequisite for cumulative research.
Second, the field would benefit from the development, and regular use, of a set of standardized self-report and observational measures that are validated among children. Such measures would further increase comparability between different studies’ outcomes. In addition, ascertaining both the validity and reliability of measures would contribute to the conclusive power of individual studies.
Third, there is also room for some more general methodological improvements: For example, the conclusive power of many studies could be increased if they varied one, isolated feature at a time, rather than studying multiple features of CRI simultaneously. In correlational designs, more attention should be paid to the inclusion of control variables to reduce the number of alternative interpretations of findings. Moreover, systematic moderator-effect studies would help unravel, for example, the influences of children’s age and biological sex to elucidate systematic influences of such user characteristics. Finally, more elaborate statistical reporting (e.g., inclusion of effect size information in addition to significance levels) could provide additional insight into studies’ findings.
Fourth, more research is needed that attempts to elucidate the psychological mechanisms underlying children’s relationship formation with robots. Even though various influences of robot characteristics and interaction styles on closeness and trust have been reported, it remains largely unknown how these influences come about and whether certain internal states might have amplifying or inhibitory effects. We used the S–O–R paradigm as a heuristic to conceptually organize our findings and provide insights into plausible relationships between potential predictors, mediators, and outcome variables of child–robot relationship formation. Future work should develop this model further and test it statistically.
Fifth and finally, the effects of CRI are often assessed on the basis of cross-sectional studies. Longitudinal studies often limit themselves to only a few interactions between children and robots. Investigating CRI across a larger number of encounters would enhance our knowledge about how relationships between children and robots develop over time, once novelty effects have worn off [84]. To better predict when novelty effects disappear and children’s familiarization with a robot starts, scholars should not only consider the number of robot encounters but also the duration of encounters, the number of people involved in the interaction, and the complexity of a robot’s behavior [84].
To conclude, CRI research has produced important insights into children’s relationship formation with robots. At the same time, the field is still at an early stage, which comes with several challenges, both at a methodological and at a theoretical level. The aforementioned directions for future research could stimulate the field to mature by bringing forth more coherent and robust findings and by bridging gaps in our understanding of the underlying psychological mechanisms.
References
Abe K, Hieida C, Attamimi M, Nagai T, Shimotomai T, Omori T, Oka N (2014) Toward playmate robots that can play with children considering personality. In: Proceedings of the second international conference on human–agent interaction. HAI 2014. ACM, Tsukuba, pp 165–168. https://doi.org/10.1145/2658861.2658913
Ahmad MI, Mubin O, Orlando J (2016a) Children views on social robot’s adaptations in education. In: Proceedings of the 28th Australian conference on computer–human interaction. OzCHI 2016. ACM Launceston, pp 145–149. https://doi.org/10.1145/3010915.3010977
Ahmad MI, Mubin O, Orlando J (2016b) Effect of different adaptations by a robot on children’s long-term engagement: an exploratory study. In: Proceedings of the 13th international conference on advances in computer entertainment technology. ACE 2016. ACM, Osaka, pp 31–37. https://doi.org/10.1145/3001773.3001803
Ahmad MI, Mubin O, Orlando J (2017) Adaptive social robot for sustaining social engagement during long-term children–robot interaction. Int J Hum Comput Int 33(12):1–20. https://doi.org/10.1080/10447318.2017.1300750
Alves-Oliveira P, Sequeira P, Paiva A (2016) The role that an educational robot plays. In: Proceedings of the 25th IEEE international symposium on robot and human interactive communication. RO-MAN 2016. IEEE, New York, pp 817–822. https://doi.org/10.1109/roman.2016.7745213
Asselborn TLC, Johal W, Dillenbourg P (2017) Keep on moving! Exploring anthropomorphic effects of motion during idle moments. In: Proceedings of the 26th IEEE international symposium on robot and human interactive communication. RO-MAN 2017. IEEE, Lisbon, pp 897–902. https://doi.org/10.1109/roman.2017.8172409
Barco A, Albo-Canals J, Garriga C (2014) Engagement based on a customization of an iPod-LEGO robot for a long-term interaction for an educational purpose. In: Proceedings of the ninth international conference on human–robot interaction. HRI 2014. ACM/IEEE, Bielefeld, pp 124–125. https://doi.org/10.1145/2559636.2563697
Bartneck C, Kulić D, Croft E, Zoghbi S (2009) Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int J Soc Robot 1(1):71–81. https://doi.org/10.1007/s12369-008-0001-3
Baxter P, de Jong C, Aarts R, de Haas M, Vogt P (2017) The effect of age on engagement in preschoolers’ child–robot interactions. In: Proceedings of the companion of the eleventh ACM/IEEE international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 81–82. https://doi.org/10.1145/3029798.3038391
Baxter P, Kennedy J, Belpaeme T, Wood R, Baroni I, Nalin M (2013) Emergence of turn-taking in unstructured child–robot social interactions. In: Proceedings of the eight international conference on human–robot interaction. HRI 2013. ACM/IEEE, Tokyo, pp 77–78. https://doi.org/10.1109/hri.2013.6483509
Baxter P, Kennedy J, Senft E, Lemaignan S, Belpaeme T (2016) From characterising three years of HRI to methodology and reporting recommendations. In: Proceedings of the eleventh international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 391–398. https://doi.org/10.1109/hri.2016.7451777
Begum M, Serna RW, Yanco HA (2016) Are robots ready to deliver autism interventions? A comprehensive review. Int J Soc Robot 8(2):157–181. https://doi.org/10.1007/s12369-016-0346-y
Beran TN, Ramirez-Serrano A, Vanderkooi OG, Kuhn S (2013) Reducing children’s pain and distress towards flu vaccinations: a novel and effective application of humanoid robotics. Vaccine 31(25):2772–2777. https://doi.org/10.1016/j.vaccine.2013.03.056
Berk LE (2014) Exploring lifespan development, 3rd edn. Pearson, Boston
Bernath MS, Feshbach ND (1995) Children’s trust: theory, assessment, development, and research directions. Appl Prev Psychol 4(1):1–19. https://doi.org/10.1016/s0962-1849(05)80048-4
Berscheid E, Regan P (2005) The psychology of interpersonal relationships. Pearson Education, Upper Saddle River
Bethel CL, Henkel Z, Stives K, May DC, Eakin DK, Pilkinton M, Jones A, Stubbs-Richardson M (2016) Using robots to interview children about bullying: Lessons learned from an exploratory study. In: Proceedings of the 25th international symposium on robot and human interactive communication. RO-MAN 2016. IEEE, New York, pp 712–717. https://doi.org/10.1109/roman.2016.7745197
Bethel CL, Stevenson MR, Scassellati B (2011) Secret-sharing: interactions between a child, robot, and adult. In: Proceedings of the international conference on systems, man, and cybernetics. SMC 2011. IEEE, Anchorage, pp 2489–2494. https://doi.org/10.1109/icsmc.2011.6084051
Birnbaum GE, Mizrahi M, Hoffman G, Reis HT, Finkel EJ, Sass O (2016) Machines as a source of consolation: robot responsiveness increases human approach behavior and desire for companionship. In: Proceedings of the eleventh international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 165–171. https://doi.org/10.1109/hri.2016.7451748
Blanson Henkemans OA, Bierman BP, Janssen J, Looije R, Neerincx MA, van Dooren MM, de Vries JLE, van der Burg GJ, Huisman SD (2017) Design and evaluation of a personal robot playing a self-management education game with children with diabetes type 1. Int J Hum-Comput Stud 106:63–76. https://doi.org/10.1016/j.ijhcs.2017.06.001
Blanson Henkemans OA, Bierman BP, Janssen J, Neerincx MA, Looije R, van der Bosch H, van der Giessen JAM (2013) Using a robot to personalise health education for children with diabetes type 1: a pilot study. Patient Educ Couns 92(2):174–181. https://doi.org/10.1016/j.pec.2013.04.012
Breazeal CL (2004) Designing sociable robots. MIT Press, Cambridge
Breazeal CL, Harris PL, Desteno D, Kory Westlund JM, Dickens L, Jeong S (2016) Young children treat robots as informants. Top Cogn Sci 8(2):481–491. https://doi.org/10.1111/tops.12192
Breazeal CL, Takanishi A, Kobayashi T (2008) Social robots that interact with people. In: Siciliano B, Khatib O (eds) Springer handbook of robotics. Springer, Berlin, pp 1349–1369. https://doi.org/10.1007/978-3-540-30301-5_59
Broadbent E (2017) Interactions with robots: the truths we reveal about ourselves. Annu Rev Psychol 68(9):627–652. https://doi.org/10.1146/annurev-psych-010416-043958
Cabibihan J, Javed H, Ang M, Aljunied SM (2013) Why robots? A survey on the roles and benefits of social robots in the therapy of children with autism. Int J Soc Robot 5(4):593–618. https://doi.org/10.1007/s12369-013-0202-2
Cameron D, Fernando S, Collins E, Millings A, Moore RK, Sharkey A, Evers V, Prescott T (2015) Presence of life-like robot expressions influences children’s enjoyment of human–robot interactions in the field. In: Proceedings of the 4th international symposium on new frontiers in human–robot interaction. AISB 2015. AISB, Canterbury, pp 1–6
Canamero L, Lewis M (2016) Making new “new AI” friends: designing a social robot for diabetic children from an embodied AI perspective. Int J Soc Robot 8(4):523–537. https://doi.org/10.1007/s12369-016-0364-9
Castellano G, Leite I, Pereira A, Martinho C, Paiva A, McOwan PW (2009) It’s all in the game: towards an affect sensitive and context aware game companion. In: Proceedings of the third international conference on affective computing and intelligent interaction. ACII 2009. IEEE, Amsterdam, pp 1–8. https://doi.org/10.1109/acii.2009.5349558
Chandra S, Alves-Oliveira P, Lemaignan S, Sequeira P, Paiva A, Dillenbourg P (2015) Can a child feel responsible for another in the presence of a robot in a collaborative learning activity? In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2015. IEEE, Kobe, pp 167–172. https://doi.org/10.1109/roman.2015.7333678
Chandra S, Alves-Oliveira P, Lemaignan S, Sequeira P, Paiva A, Dillenbourg P (2016) Children’s peer assessment and self-disclosure in the presence of an educational robot. In: Proceedings of the 25th international symposium on robot and human interactive communication. RO-MAN 2016. IEEE, New York, pp 539–544. https://doi.org/10.1109/roman.2016.7745170
Cole M, Cole SR, Lightfoot C (2005) The development of children, 2nd edn. Worth, New York
Dautenhahn K (2007) Socially intelligent robots: dimensions of human–robot interaction. Philos Trans R Soc B 362(1480):679–704. https://doi.org/10.1098/rstb.2006.2004
Davis D, Perkowitz WT (1979) Consequences of responsiveness in dyadic interaction: effects of probability of response and proportion of content-related responses on interpersonal attraction. J Pers Soc Psychol 37(4):534–550. https://doi.org/10.1037/0022-3514.37.4.534
De Haas M, Aroyo AM, Barakova E, Haselager W, Smeekens I (2016) The effect of a semi-autonomous robot on children. In: Proceedings of the eight international conference on intelligent systems. IS 2016. IEEE, Sofia, pp 376–381. https://doi.org/10.1109/is.2016.7737448
De Haas M, Baxter P, de Jong C, Krahmer E, Vogt P (2017) Exploring different types of feedback in preschooler and robot interaction. In: Proceedings of the companion of the eleventh ACM/IEEE international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 127–128. https://doi.org/10.1145/3029798.3038433
Deshmukh A, Janarthanam S, Hastie H, Lim MY, Aylett R, Castellano G (2016) How expressiveness of a robotic tutor is perceived by children in a learning environment. In: Proceedings of the eleventh international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 423–424. https://doi.org/10.1109/hri.2016.7451787
Epstein S (1990) Cognitive-experiential self-theory. In: Pervin LA (ed) Handbook of personality. Guilford Press, New York, pp 165–192
Eyssel F (2017) An experimental psychological perspective on social robotics. Robot Auton Syst 87:363–371. https://doi.org/10.1016/j.robot.2016.08.029
Finkel EJ, Simpson JA, Eastwick PW (2017) The psychology of close relationships: fourteen core principles. Annu Rev Psychol 68(1):383–411. https://doi.org/10.1146/annurev-psych-010416-044038
Fong T, Nourbakhsh I, Dautenhahn K (2003) A survey of socially interactive robots. Robot Auton Syst 42(3):143–166. https://doi.org/10.1016/S0921-8890(02)00372-X
Gavetti G, Levinthal D (2000) Looking forward and looking backward: cognitive and experiential search. Admin Sci Quart 45(1):113–137. https://doi.org/10.2307/2666981
Gifford-Smith ME, Brownell CA (2003) Childhood peer relationships: social acceptance, friendships, and peer networks. J Sch Psychol 41(4):235–284. https://doi.org/10.1016/S0022-4405(03)00048-7
Gordon G, Spaulding S, Kory Westlund J, Lee JJ, Plummer L, Martinez M, Das M, Breazeal C (2016) Affective personalization of a social robot tutor for children’s second language skills. In: Proceedings of the 30th AAAI conference on artificial intelligence. AAAI, Palo Alto, pp 3951–3957
Greene JO, Burleson BR (2003) Handbook of communication and social interaction skills. Psychology Press, Oxford
Guneysu A, Arnrich B (2017) Socially assistive child–robot interaction in physical exercise coaching. In: Proceedings of the 26th IEEE international symposium on robot and human interactive communication. RO-MAN 2017. IEEE, Lisbon, pp 670–675. https://doi.org/10.1109/roman.2017.8172375
Han J, Kim D (2009) r-Learning services for elementary school students with a teaching assistant robot. In: Proceedings of the fourth international conference on huma–robot interaction. HRI 2009. ACM/IEEE, La Jolla, pp 255–256. https://doi.org/10.1145/1514095.1514163
Hartup WW, Stevens N (1997) Friendships and adaptation in the life course. Psychol Bull 121(3):355–370. https://doi.org/10.1037/0033-2909.121.3.355
Henkel Z, Bethel CL, Kelly J, Jones A, Stives K, Buchanan Z, Eakin DK, May DC, Pilkinton M (2017) He can read your mind: perceptions of a character-guessing robot. In: Proceedings of the 26th IEEE international symposium on robot and human interactive communication. RO-MAN 2017. IEEE, Lisbon, pp 242–247. https://doi.org/10.1109/roman.2017.8172309
Hieida C, Abe K, Attamimi M, Shimotomai T, Nagai T, Omori T (2014) Physical embodied communication between robots and children: an approach for relationship building by holding hands. In: Proceedings of the international conference on intelligent robots and systems. IROS 2014. IEEE, Chicago, pp 3291–3298. https://doi.org/10.1109/iros.2014.6943020
Houston MJ, Rothschild ML (1978) Conceptual and methodological perspectives on involvement. In: Jain SC (ed) Research frontiers in marketing: dialogues and directions. American Marketing Association, Chicago, pp 184–187
Huang LY, Hsieh YJ, Wu YCJ (2014) Gratifications and social network service usage: the mediating role of online experience. Inf Manag 51(6):774–782. https://doi.org/10.1016/j.im.2014.05.004
Hyun E, Yoon H (2009) Characteristics of young children’s utilization of a robot during play time: a case study. In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2009. IEEE, Toyama, pp 675–680. https://doi.org/10.1109/roman.2009.5326081
Jeong S, Logan DE, Goodwin MS, Graca S, O’Connell B, Goodenough H, Anderson L, Stenquist N, Fitzpatrick K, Zisook M, Plummer L, Breazeal CL, Weinstock P (2015). A social robot to mitigate stress, anxiety, and pain in hospital pediatric are. In: Proceedings of the tenth international conference on human–robot interaction. HRI 2015. ACM/IEEE, Portland, pp 103–104. https://doi.org/10.1145/2701973.2702028
Jones A, Bull S, Castellano G (2015) Open learner modelling with a robotic tutor. In: Proceedings of the tenth international conference on human–robot interaction. HRI 2015. ACM/IEEE, Portland, pp 237–238. https://doi.org/10.1145/2701973.2702713
Kahn PH, Gary HE, Shen S (2013) Children’s social relationships with current and near-future robots. Child Dev Perspect 7(1):32–37. https://doi.org/10.1111/cdep.12011
Kahn PH, Kanda T, Ishiguro H, Freier NG, Severson RL, Gill BT, Ruckert JH, Shen S (2012) “Robovie, you’ll have to go into the closet now”: children’s social and moral relationships with a humanoid robot. Dev Psychol 48(2):303–314. https://doi.org/10.1037/a0027033
Kanda T, Hirano T, Eaton D, Ishiguro H (2004) Interactive robots as social partners and peer tutors for children: a field trial. Hum Comput Interact 19(1):61–84. https://doi.org/10.1207/s15327051hci1901&2_4
Kanda T, Sato R, Saiwaki N, Ishiguro H (2007) A two-month field trial in an elementary school for long-term human–robot interaction. IEEE Trans Robot 23(5):962–971. https://doi.org/10.1109/tro.2007.904904
Kanda T, Shimada M, Koizumi S (2012) Children learning with a social robot. In: Proceedings of the seventh international conference on human–robot interaction. HRI 2012. ACM/IEEE, Boston, pp 351–358. https://doi.org/10.1145/2157689.2157809
Kennedy J, Baxter P, Belpaeme T (2015) Comparing robot embodiments in a guided discovery learning interaction with children. Int J Soc Robot 7(2):293–308. https://doi.org/10.1007/s12369-014-0277-4
Kessens JM, Neerincx MA, Looije R, Kroes M, Bloothooft G (2009) Facial and vocal emotion expression of a personal computer assistant to engage, educate and motivate children. In: Proceedings of the third international conference on affective computing and intelligent interaction. ACII 2009. IEEE, Amsterdam, pp 1–7. https://doi.org/10.1109/acii.2009.5349582
Kidd CD (2003) Sociable robots: the role of presence and task in human–robot interaction. Dissertation, Massachusetts Institute of Technology
Kim ES, Berkovits LD, Bernier EP, Leyzberg D, Shic F, Paul R, Scassellati B (2013) Social robots as embedded reinforcers of social behavior in children with autism. J Autism Dev Disord 43(5):1038–1049. https://doi.org/10.1007/s10803-012-1645-2
Kim EH, Kwak SS, Kwak YK (2009) Can robotic emotional expressions induce a human to empathize with a robot? In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2009. IEEE, Toyama, pp 358–362. https://doi.org/10.1109/roman.2009.5326282
Kim KJ, Park E, Sundar SS (2013) Caregiving role in human–robot interaction: a study of the mediating effects of perceived benefit and social presence. Comput Hum Behav 29(4):1799–1806. https://doi.org/10.1016/j.chb.2013.02.009
Komatsubara T, Shiomi M, Kanda T, Ishiguro H (2017) Can using pointing gestures encourage children to ask questions? Int J Soc Robot. https://doi.org/10.1007/s12369-017-0444-5
Kory Westlund J, Jeong S, Park HW, Ronfard S, Adhikari A, Harris PL, DeSteno D, Breazeal CL (2017) Flat vs. expressive storytelling: Young children’s learning and retention of a social robot’s narrative. Front Hum Neurosci. https://doi.org/10.3389/fnhum.2017.00295
Kory Westlund JM, Martinez M, Archie M, Das M, Breazeal CL (2016) Effects of framing a robot as a social agent or as a machine on children’s social behavior. In: Proceedings of the 25th international symposium on robot and human interactive communication. RO-MAN 2016. IEEE, New York, pp 459–460. https://doi.org/10.1109/hri.2016.7451805
Kose-Bagci H, Ferrari E, Dautenhahn K, Syrdal DS, Nehaniv CL (2009) Effects of embodiment and gestures on social interaction in drumming games with a humanoid robot. Adv Robot 23(14):1951–1996. https://doi.org/10.1163/016918609X12518783330360
Kozima H, Nakagawa C (2007) A robot in a playroom with preschool children: Longitudinal field practice. In: Proceedings of the 16th international conference on robot and human interactive communication. RO-MAN 2007. IEEE, Jeju, pp 1058–1059. https://doi.org/10.1109/roman.2007.4415238
Krämer NC, Eimler S, von der Pütten A, Payr S (2011) Theory of companions: what can theoretical models contribute to applications and understanding of human–robot interaction? Appl Artif Intell 25(6):474–502. https://doi.org/10.1080/08839514.2011.587153
Kruijff-Korbayova I, Oleari E, Baroni I, Kiefer B, Zelati MC, Pozzi C, Sanna A (2014) Effects of off-activity talk in human–robot interaction with diabetic children. In: Proceedings of the 23rd international workshop on robot and human interactive communication. RO-MAN 2014. IEEE, Edinburgh, pp 649–654. https://doi.org/10.1109/roman.2014.6926326
Landrum AR, Eaves BS, Shafto P (2015) Learning to trust and trusting to learn: a theoretical framework. Trends Cogn Sci 19(3):109–111. https://doi.org/10.1016/j.tics.2014.12.007
Larson RW (1983) Adolescents’ daily experience with family and friends: contrasting opportunity systems. J Marriage Fam 45(4):739–750. https://doi.org/10.2307/351787
Lee KM (2004) Presence, explicated. Commun Theor 14(1):27–50. https://doi.org/10.1111/j.1468-2885.2004.tb00302.x
Lee KM, Jung Y, Kim J, Kim SR (2006) Are physically embodied social agents better than disembodied social agents? The effects of physical embodiment, tactile interaction, and people’s loneliness in human–robot interaction. Int J Hum Comput Stud 64(10):962–973. https://doi.org/10.1016/j.ijhcs.2006.05.002
Lee JJ, Kim DW, Kang BY (2012) Exploiting child–robot aesthetic interaction for a social robot. Int J Adv Robot Syst 9(3):1–9. https://doi.org/10.5772/51191
Lee KM, Park N, Song H (2005) Can a robot be perceived as a developing creature? Effects of a robot’s long-term cognitive developments on its social presence and people’s social responses toward it. Hum Commun Res 31(4):538–563. https://doi.org/10.1093/hcr/31.4.538
Lee KM, Peng W, Jin SA, Yan C (2006) Can robots manifest personality? An empirical test of personality recognition, social responses, and social presence in human–robot interaction. J Commun 56(4):754–772. https://doi.org/10.1111/j.1460-2466.2006.00318.x
Leite I, Castellano G, Pereira A, Martinho C, Paiva A (2012) Modelling empathic behaviour in a robotic game companion for children: an ethnographic study in real-world settings. In: Proceedings of the seventh international conference on human–robot interaction. HRI 2012. ACM/IEEE, Boston, pp 367–374. https://doi.org/10.1145/2157689.2157811
Leite I, Castellano G, Pereira A, Martinho C, Paiva A (2014) Empathic robots for long-term interaction: evaluating social presence, engagement, and perceived support in children. Int J Soc Robot 6(3):329–341. https://doi.org/10.1007/s12369-014-0227-1
Leite I, Lehman JF (2016) The robot who knew too much. In: Proceedings of the 15th international conference on interaction design and children. IDC 2014. ACM, Aarhus, pp 379–387. https://doi.org/10.1145/2930674.2930687
Leite I, Martinho C, Paiva A (2013) Social robots for long-term interaction: a survey. Int J Soc Robot 5(2):291–308. https://doi.org/10.1007/s12369-013-0178-y
Leite I, Martinho C, Pereira A, Paiva A (2009) As time goes by: Long-term evaluation of social presence in robotic companions. In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2009. IEEE, Toyama, pp 669–674. https://doi.org/10.1109/roman.2009.5326256
Leite I, Pereira A, Lehman JF (2017) Persistent memory in repeated child–robot conversations. In: Proceedings of the 16th international conference on interaction design and children. IDC 2017. ACM, Stanford, pp 238–247. https://doi.org/10.1145/3078072.3079728
Li J (2015) The benefit of being physically present: a survey of experimental works comparing copresent robots, telepresent robots and virtual agents. Int J Hum Comput Stud 77:23–27. https://doi.org/10.1016/j.ijhcs.2015.01.001
Looije R, Neerincx MA, Peters JK, Blanson Henkemans OA (2016) Integrating robot support functions into varied activities at returning hospital visits: supporting child’s self-management of diabetes. Int J Soc Robot 8(4):483–497. https://doi.org/10.1007/s12369-016-0365-8
Looije R, van der Zalm A, Neerincx MA, Beun RJ (2012) Help, I need some body! the effect of embodiment on playful learning. In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2012. IEEE, Paris, pp 718–724. https://doi.org/10.1109/roman.2012.6343836
Lücking P, Rohlfing K, Wrede B, Schilling M (2016) Preschoolers’ engagement in social interaction with an autonomous robotic system. In: Proceedings of the joint international conference on development, learning and epigenetic robotics. ICDL-EpiRob 2016. IEEE, Cergny-Pontoise, pp 210–216. https://doi.org/10.1109/devlrn.2016.7846821
MacKinnon DP, Fairchild AJ (2009) Current directions in mediation analysis. Curr Dir Psychol Sci 18(1):16–20. https://doi.org/10.1111/j.1467-8721.2009.01598.x.Current
Martelaro N, Nneji VC, Ju W, Hinds P (2016) Tell me more: designing HRI to encourage more trust, disclosure, and companionship. In: Proceedings of the eleventh international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 181–188. https://doi.org/10.1109/hri.2016.7451750
Mavridis N (2015) A review of verbal and non-verbal human–robot interactive communication. Robot Auton Syst 63:22–35. https://doi.org/10.1016/j.robot.2014.09.031
McCallum M, Piper WE, Ogrodniczuk JS, Joyce AS (2003) Relationships among psychological mindedness, alexithymia and outcome in four forms of short-term psychotherapy. Psychol Psychother 76(2):133–144. https://doi.org/10.1348/147608303765951177
Michalowski MP, Sabanovic S, Kozima H (2007) A dancing robot for rhythmic social interaction. In: Proceedings of the second international conference on human–robot interaction. HRI 2007. ACM/IEEE, Arlington, pp 89–96. https://doi.org/10.1145/1228716.1228729
Michalowski MP, Simmons R, Kozima H (2009) Rhythmic attention in child–robot dance play. In: Proceedings of the 18th international symposium on robot and human interactive communication. RO-MAN 2009. IEEE, Toyama, pp 816–821. https://doi.org/10.1109/roman.2009.5326143
Moher D, Liberati A, Tetzlaff J, Altman DG (2009) Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement. PLoS Med 6(7):1–6. https://doi.org/10.1371/journal.pmed1000097
Nalin M, Baroni I, Kruijff-Korbayova I, Canamero L, Lewis M, Beck A, Cuayahuitl H, Sanna A (2012) Children’s adaptation in multi-session interaction with a humanoid robot. In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2012. IEEE, Paris, pp 351–357. https://doi.org/10.1109/roman.2012.6343778
Neerincx A, Sacchitelli F, Kaptein R, van der Pal S, Oleari E, Neerincx MA (2016) Child’s culture-related experiences with a social robot at diabetes camps. In: Proceedings of the eleventh international conference on human–robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 485–486. https://doi.org/10.1109/hri.2016.7451818
Newcomb AF, Bagwell CL (1995) Children’s friendship relations: a meta-analytic review. Psychol Bull 117(2):306–347. https://doi.org/10.1037//0033-2909.117.2.306
Newmann FM, Wehlage GG, Lamborn SD (1992) The significance and sources of student engagement. In: Newman FM (ed) Student engagement and achievement in American secondary schools. Teachers College Press, New York, pp 1–39
Nishio S, Ishiguro H, Hagita N (2007) Can a teleoperated android represent personal presence? A case study with children. Psychol Int J Psychol Orient 50(4):330–342. https://doi.org/10.2117/psysoc.2007.330
Oh K, Kim M (2010) Social attributes of robotic products: Observations of child–robot interactions in a school environment. Int J Des 4(1):45–55
Okita SY, Ng-Thow-Hing V, Sarvadevabhatla RK (2011) Multimodal approach to affective human–robot interaction design with children. ACM Trans Interact Intel Syst 1(1):1–29. https://doi.org/10.1145/2030365.2030370
Okita SY, Ng-Thow-Hing V, Sarvadevabhatla RK (2012) Captain may I? Proxemics study examining factors that influence distance between humanoid robots, children, and adults, during human–robot interaction. In: Proceedings of the seventh international conference on human–robot interaction. HRI 2012. ACM IEEE, Boston, pp 203–204. https://doi.org/10.1145/2157689.2157756
Park HW, Gelsomini M, Lee JJ, Zhu T, Breazeal CL (2017) Backchannel opportunity prediction for social robot listeners. In: Proceedings of the 2017 IEEE international conference on robotics and automation. ICRA 2017. IEEE, Marina Bay Sands, pp 2308–2314. https://doi.org/10.1109/icra.2017.7989266
Petticrew M, Roberts H (2006) Systematic reviews in the social sciences: a practical guide. Blackwell, Malden
Pfeifer R, Scheier C (2001) Understanding intelligence. MIT Press, Cambridge
Riek L (2012) Wizard of Oz studies in HRI: a systematic review and new reporting guidelines. J Hum Robot Int 1(1):119–136. https://doi.org/10.5898/JHRI.1.1.Riek
Riggio RE (1986) Assessment of basic social skills. J Pers Soc Psychol 51(3):649–660. https://doi.org/10.1037/0022-3514.51.3.649
Ros R, Baroni I, Demiris Y (2014) Adaptive human–robot interaction in sensorimotor task instruction: from human to robot dance tutors. Robot Auton Syst 62(6):707–720. https://doi.org/10.1016/j.robot.2014.03.005
Ros R, Oleari E, Pozzi C, Sacchitelli F, Baranzini D, Bagherzadhalimi A, Sanna A, Demiris Y (2016) A motivational approach to support healthy habits in long-term child–robot interaction. Int J Soc Robot 8(5):599–617. https://doi.org/10.1007/s12369-016-0356-9
Rotter JB (1967) A new scale for the measurement of interpersonal trust. J Pers 35(4):651–665
Sadoughi N, Pereira A, Jain R, Leite I, Lehman JF (2017) Creating prosodic synchrony for a robot co-player in a speech-controlled game for children. In: Proceedings of the 12th international conference on human–robot interaction. HRI 2017. ACM/IEEE, Vienna, pp 91–99. https://doi.org/10.1145/2909824.3020244
Saint-Aimé S, Grandgeorge M, Le-Pévédic B, Duhaut D (2012) Evaluation of Emi interaction with non-disabled children in nursery school using Wizard of Oz technique. In: Proceedings of the international conference on robotics and biomimetics. ROBIO 2012. IEEE, Guangzhou, pp 1147–1152. https://doi.org/10.1109/robio.2011.6181442
Salter T, Werry I, Michaud F (2008) Going into the wild in child–robot interaction studies: issues in social robotic development. Intell Serv Robot 1(2):93–108. https://doi.org/10.1007/s11370-007-0009-9
Sandygulova A, O’Hare GMP (2016) Investigating the impact of gender segregation within observational pretend play interaction. In: Proceedings of the eleventh international conference on human robot interaction. HRI 2016. ACM/IEEE, Christchurch, pp 399–406. https://doi.org/10.1109/hri.2016.7451778
Sandygulova A, Dragone M, O’Hare GMP (2014) Investigating the impact of gender development in child–robot interaction. In: Proceedings of the ninth international conference on human–robot interaction. HRI 2014. ACM/IEEE, Bielefeld, pp 284–285. https://doi.org/10.1145/2559636.2559848
Serholt S, Barendregt W (2016) Robots tutoring children: Longitudinal evaluation of social engagement in child–robot interaction. In: Proceedings of the ninth nordic conference on human–computer interaction. ACM, Gothenborg. https://doi.org/10.1145/2971485.2971536
Serholt S, Basedow A, Barendregt W, Obaid M (2014) Comparing a humanoid tutor to a human tutor delivering an instructional task to children. In: Proceedings of the 14th international conference on humanoid robots. Humanoids 2014. IEEE, Madrid, pp 1134–1141. https://doi.org/10.1109/humanoids.2014.7041511
Shahid S, Krahmer E, Swerts M (2010) Playing with iCat: investigating childrenʼs appreciation of game plays with a social robot. In: Proceedings of the seventh international conference on advances in computer entertainment technology. ACE 2010. ACM, Taipei, pp 106–107. https://doi.org/10.1145/1971630.1971664
Shahid S, Krahmer E, Swerts M (2011) Child–robot interaction: Playing alone or together? In: Proceedings of the annual conference on human factors in computing systems. CHI 2011. ACM, New York, pp 1399–1404. https://doi.org/10.1145/1979742.1979781
Shahid S, Krahmer E, Swerts M (2014) Child–robot interaction across cultures: how does playing a game with a social robot compare to playing a game alone or with a friend? Comput Hum Behav 40:86–100. https://doi.org/10.1016/j.chb.2014.07.043
Shamir L (2010) The effect of conference proceedings on the scholarly communication in computer science and engineering. Sch Res Commun 1(2):1–7. https://doi.org/10.22230/src.2010v1n2a25
Sharkey AJC (2016) Should we welcome robot teachers? Ethics Inf Technol 18(4):283–297. https://doi.org/10.1007/s10676-016-9387-z
Sharkey N, Sharkey A (2010) The crying shame of robot nannies: an ethical appraisal. Interact Stud 11(2):161–190. https://doi.org/10.1075/is.11.2.01sha
Short E, Swift-Spong K, Greczek J et al (2014) How to train your DragonBot: socially assistive robots for teaching children about nutrition through play. In: Proceedings of the 23rd international symposium on robot and human interactive communication. RO-MAN 2014. IEEE, Edinburgh, pp 924–929. https://doi.org/10.1109/roman.2014.6926371
Silvera-Tawil D, Velonaki M, Rye D (2015) Human–robot interaction with humanoid Diamandini using an open experimentation method. In: Proceedings of the international workshop on robot and human interactive communication. RO-MAN 2015. IEEE, Kobe, pp 425–430. https://doi.org/10.1109/roman.2015.7333674
Simmons R, Knight H (2017) Keep on dancing: Effects of expressive motion mimicry. In: Proceedings of the 26th IEEE international symposium on robot and human interactive communication. RO-MAN 2017. IEEE, Lisbon, pp 720–727. https://doi.org/10.1109/roman.2017.8172382
Skantze G (2017) Predicting and regulating participation equality in human–robot conversations: effects of age and gender. In: Proceedings of the 12th international conference on human–robot interaction. HRI 2017. ACM/IEEE, Vienna, pp 196–204. https://doi.org/10.1145/2909824.3020210
Sternberg RJ (1987) Liking versus loving: a comparative evaluation of theories. Psychol Bull 102(3):331–343. https://doi.org/10.1037/0033-2909.102.3.331
Tamura Y, Kimoto M, Shiomi M, Iio T, Shimohara K, Hagita N (2017) Effects of a listener robot with children in storytelling. In: Proceedings of the fifth international conference on human agent interaction. HAI 2017. ACM, Bielefeld, pp 35–43. https://doi.org/10.1145/3125739.3125750
Tanaka F, Cicourel A, Movellan JR (2007) Socialization between toddlers and robots at an early childhood education center. Proc Natl Acad Sci USA 104(2007):17954–17958. https://doi.org/10.1073/pnas.0707769104
Tanaka F, Ghosh, M (2011) The implementation of care-receiving robot at an english learning school for children. In: Proceedings of the sixth international conference on human–robot interaction. HRI 2011. ACM/IEEE, Lausanne, pp 265–266. https://doi.org/10.1145/1957656.1957763
Tanaka F, Matsuzoe S (2012) Children teach a care-receiving robot to promote their learning: field experiments in a classroom for vocabulary learning. J Hum Robot Interact 1(1):78–95. https://doi.org/10.5898/JHRI.1.1.Tanaka
Tielman M, Neerincx MA, Meyer JJ, Looije R (2014) Adaptive emotional expression in robot-child interaction. In: Proceedings of the ninth international conference on human–robot interaction. HRI 2014. ACM/IEEE, Bielefeld, pp 407–414. https://doi.org/10.1145/2559636.2559663
Toh LPE, Causo A, Tzuo PWI, Chen IM, Yeo SH (2016) A review on the use of robots in education and young children. J Educ Technol Soc 19(2):148–163
Tozadore D, Pinto AHM, Ranieri CM, Batista MR, Romero RAF (2017). Tablets and humanoids as engaging platforms for teaching languages. In: Proceedings of the robotics symposium and brazilian symposium on robotics. LARS and SBR 2017. IEEE, Curitiba. https://doi.org/10.1109/sbr-lars-r.2017.8215290
Tozadore DC, Pinto AHM, Romero RAF (2016) Variation in a humanoid robot behavior to analyse interaction quality in pedagogical sessions with children. In: Proceedings of the 13th Latin American robotics symposium and fourth Brazilian robotics symposium. LARS/SBR 2016. IEEE, Recife, pp 133–138. https://doi.org/10.1109/lars-sbr.2016.29
Tozadore DC, Pinto AHM, Romero RAF, Trovato G (2017) Wizard of Oz vs autonomous: children’s perception changes according to robot’s operation condition. In: Proceedings of the 26th IEEE international symposium on robot and human interactive communication. RO-MAN 2017. IEEE, Lisbon, pp 664–669. https://doi.org/10.1109/roman.2017.8172374
Tung FW (2016) Child perception of humanoid robot appearance and behavior. Int J Hum Comput Int 32(6):493–502. https://doi.org/10.1080/10447318.2016.1172808
Turkle S, Taggart W, Kidd CD, Dasté O (2006) Relational artifacts with children and elders: the complexities of cybercompanionship. Connect Sci 18(4):347–361. https://doi.org/10.1080/09540090600868912
Valkenburg PM, Peter J (2013) The differential susceptibility to media effects model. J Commun 63(2):221–243. https://doi.org/10.1111/jcom.12024
Van den Heuvel RJF, Lexis MAS, Gelderblom GJ, Jansens RML, de Witte LP (2015) Robots and ICT to support play in children with severe physical disabilities: a systematic review. Disabil Rehabil 11(2):103–116. https://doi.org/10.3109/17483107.2015.1079268
Vázquez M, Steinfeld A, Hudson SE, Forlizzi J (2014) Spatial and other social engagement cues in a child–robot interaction: effects of a sidekick. In: Proceedings of the ninth international conference on human–robot interaction. HRI 2014. ACM/IEEE, Bielefeld, pp 391–398. https://doi.org/10.1145/2559636.2559684
Walther JB, Parks MR (2002) Cues filtered out, cues filtered in: computer–mediated communication and relationships. In: Knapp ML, Daly JA (eds) Handbook of interpersonal communication, 3rd edn. Sage, Thousand Oaks, pp 529–563
Wigdor N, de Greeff J, Looije R, Neerincx MA (2016) How to improve human–robot interaction with conversational fillers. In: Proceedings of the 25th international symposium on robot and human interactive communication. RO-MAN 2016. IEEE, New York, pp 219–224. https://doi.org/10.1109/roman.2016.7745134
Wirth W (2006) Involvement. In: Bryant J, Vorderer P (eds) Psychology of entertainment. Erlbaum, Mahwah, pp 199–213
Wood LJ, Dautenhahn K, Rainer A, Robins B, Lehmann H, Syrdal DS (2013) Robot-mediated interviews: how effective is a humanoid robot as a tool for interviewing young children? PLoS ONE 8(3):1–13. https://doi.org/10.1371/journal.pone.0059448
Yasumatsu Y, Sono T, Hasegawa K, Imai M (2017) I can help you: Altruistic behaviors from children towards a robot at a kindergarten. In: Proceedings of the companion of the 12th international conference on human–robot interaction. HRI 2017. ACM/IEEE, Vienna, pp 331–332. https://doi.org/10.1145/3029798.3038305
Zhao S (2006) Humanoid social robots as a medium of communication. New Media Soc 8(3):401–419. https://doi.org/10.1177/1461444806061951
Acknowledgements
Work on this study was made possible by funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation program, under Grant Agreement No. 682733 to the second author.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendix 1
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
van Straten, C.L., Peter, J. & Kühne, R. Child–Robot Relationship Formation: A Narrative Review of Empirical Research. Int J of Soc Robotics 12, 325–344 (2020). https://doi.org/10.1007/s12369-019-00569-0
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-019-00569-0