
Abstract
We prove that given a compact convex non-empty domain \({\mathcal {M}}\) in the plane, a function \(\delta :\partial \mathcal M\times \partial {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) can be extended to a projective metric d on \({\mathcal {M}}\) if and only if \( \delta (P,R)+\delta (Q,S)-\delta (P,S)-\delta (Q,R)>0 \) for any convex quadrangle \(\Box (PQRS)\) inscribed in \(\partial {\mathcal {M}}\). Moreover, this extension is unique.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The problem of boundary-rigidity of Riemannian manifolds (see for example [12,13,14,15, 22]) has recently reached a general solution in [20] (see [7] for how important consequences this may have in seismology). Obtaining similar results without using differentiability properties is what motivates investigating the rigidity of projective metrics.

Polarity and \(\tau ^{}_S\) in work
Let \({\mathcal {M}}\) be a closed convex domain in the plane with non-empty interior. A metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}\) is called projective
-
(i)
if every segment (i.e., convex hull of two points) in \({\mathcal {M}}\) is a geodesic of d,
-
(ii)
triangle equality holds, i.e., \(d(P,Q)+d(Q,R)=d(P,R)\) if and only if point Q is in the segment \(\overline{PR}\) of points P, R, and
-
(iii)
d is continuous with respect to the Euclidean topology.
According to Beltrami’s theorem [3] (see also [4, (29.3)]), a projective metric is Riemannian if and only if it has constant curvature. On the other hand the class of projective metrics is really huge (see [1, 2, 16, 21]).
We prove in Theorem 3.1 that for a compact convex non-empty domain \({\mathcal {M}}\) in the plane a continuous distance \(\delta :\partial {\mathcal {M}}\times \partial {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) can be extended to a projective metric d on \({\mathcal {M}}\) if and only if \(\delta \) satisfies the quadrangle inequality (3.1).
Further, we prove in Theorem 4.1 that the above mentioned extension is unique, what we call the boundary-rigidity of the projective metrics. Such phenomenon was earlier independently observed by R. V. Ambartzumian in [1, 2. of Theorem] and also by R. Alexandrov [2, Theorem 3] for polygonal domains.
Finally we prove some further rigidity results and discuss how our rigidity result relates to the earlier results. Treatments similar to those made in this paper for higher dimensions will be the subject of an other paper.
2 Notations and Preliminaries
Points of \({\mathbb {R}}^n\) are denoted as \(A,B,\dots \), vectors as \(\overrightarrow{AB}\) or \({\varvec{a}} , {\varvec{b}} , \dots \). The latter notations are also used for points if the origin is fixed. The affine line through A and B is AB, and the closed segment with endpoints A and B is \(\overline{AB}\). The convex hull of a point set \({\mathcal {P}}\) is denoted by \({\mathrm{Conv}}{{\mathcal {P}}}\), the interior of \({\mathcal {P}}\) is denoted by \({\mathcal {P}}^\circ \), and \(\chi ^{}_{{\mathcal {P}}}\) denotes the indicator function of \({\mathcal {P}}\).
The n-dimensional projective space is denoted by \({\mathbb {P}}^n\). We use \(P^*\) to denote the set of hyperplanes through a point \(P\in {\mathbb {P}}^n\). Accordingly, the set of all hyperplanes intersecting \({\mathcal {M}}\subseteq {\mathbb {P}}^n\) is \({{\mathcal {M}}}^*\), and \({\mathbb {P}}^{n*}\) is the set of all hyperplanes of \({\mathbb {P}}^{n}\).
Let \(d_e\) be a Euclidean metric on \({\mathbb {R}}^{n+1}\), and \(\langle \cdot ,\cdot \rangle _e\) be the corresponding Euclidean product on the space of vectors of \({\mathbb {R}}^{n+1}\). We denote the unit sphere and ball by \({\mathcal {S}}_e^{n-1}\) and by \({\mathcal {B}}_e^{n}\), respectively. The Euclidean metric \(d_e\) induces a metric \(d_e^{{\mathcal {S}}}:{\mathcal {S}}^{n}\times {\mathcal {S}}^{n}\rightarrow [0,\pi ]\) by \(\cos (d_e^{{\mathcal {S}}}({\varvec{u}},{\varvec{v}}))=\langle {\varvec{u}},{\varvec{v}}\rangle _e\).
Modeling \({\mathbb {P}}^n\) as the set of straight lines through the origin O in \({\mathbb {R}}^{n+1}\) shows that the map \(\psi :{\mathcal {S}}^{n}\rightarrow {\mathbb {P}}^n\) given by \(\psi (X)=OX\) is a double covering of \({\mathbb {P}}^n\), because \(\psi (X)=\psi (-X)\). The mapping \(\psi \) transforms metric \(d_e^{{\mathcal {S}}}\) to \(d_e^{{\mathbb {P}}}\), a Riemannian elliptic metric on \({{\mathbb {P}}}^n\), by \(d_e^{{\mathbb {P}}}(OX,OY)=\min (d_e^{{\mathcal {S}}}(-X,Y),d_e^{{\mathcal {S}}}(X,Y))\).
Let \({\mathcal {S}}_e^{{\mathbb {P}}}(\psi (X))\) denote the sphere with respect to \(d_e^{{\mathbb {P}}}\) in \({\mathbb {P}}^n\) that is centered at \(\psi (X)\) and has the greatest radius. This corresponds in \({\mathcal {S}}^{n}\) to the great circle \({\mathcal {S}}_e^{n-1}(X)={\mathcal {S}}_e^{n-1}(-X)\), the “equator”, that is, the set of points having equal distances from X and \(-X\). Let \({\mathbb {R}}^{n}_e(X)\) denote the n-dimensional subspace of \({\mathbb {R}}^{n+1}\) that contains \({\mathcal {S}}_e^{n-1}(X)\), and let \({\mathbb {P}}^{n-1}_e(\psi (X))\) be the corresponding \((n-1)\)-dimensional hyperplane in \({\mathbb {P}}^{n}\). Metric \(d_e^{{\mathbb {P}}}\) induces a bijective pairing \(\epsilon :{{\mathbb {P}}}^n\leftrightarrow {\mathbb {P}}^{n*}\), the elliptic polarity, by \(\epsilon (\psi (X))={\mathbb {R}}^{n}_e(X)\) and \(\epsilon ({\mathbb {R}}^{n}_e(X))=\psi (X)\)Footnote 1. Further, \(\epsilon (P^*)=\{\epsilon ({\mathcal {H}}):P\in {\mathcal {H}}\in {\mathbb {P}}^{n*}\}=\epsilon (P)\) is a hyperplane in \({\mathbb {P}}^{n*}\), and \(\epsilon ({\mathcal {H}})=\{\epsilon (P):P\in {\mathcal {H}}\}=\epsilon ({\mathcal {H}})^*\) for any \({\mathcal {H}}\in {\mathbb {P}}^{n*}\).
Fix a point \(S\in {\mathcal {S}}^{n-1}\). The tangent space \(T_S{\mathcal {S}}^{n}\) is naturally identified with \({{\mathbb {R}}}^{n}\) by, say, \(\imath \). Let \(\hat{{\mathbb {R}}}^{n}\) be \({\mathbb {R}}^{n}\) supplemented with the ideal hyperplane. Then the mapping \(\tau ^{}_S:OX\mapsto OX\cap T_S{\mathcal {S}}^{n}\) naturally extends to a bijective pairing \(\tau ^{}_S:{\mathbb {P}}^n\leftrightarrow \hat{{\mathbb {R}}}^{n}\). The pairing \(\tau ^{}_S\) maps hyperplanes into hyperplanes, so \(\tau ^{}_S(\epsilon (P))\) is a hyperplane in \(\hat{{\mathbb {R}}}^{n}\).
We call a subset \({\mathcal {M}}\subseteq {\mathbb {P}}^n\) convex, if it is either \({\mathbb {P}}^n\), or, for a well-chosen \(S\in {\mathcal {S}}^{n}\), \(\tau ^{}_S({\mathcal {M}})\) is convex in \(T_S{\mathcal {S}}^n\cong {{\mathbb {R}}}^{n}\). With a slight abuse of notions, we call a subset \({\mathcal {M}}\subseteq {\mathbb {P}}^n\) compact, if for a well-chosen \(S\in {\mathcal {S}}^{n}\), \(\tau ^{}_S({\mathcal {M}})\) is compact in \(T_S{\mathcal {S}}^n\cong {{\mathbb {R}}}^{n}\). If \({\mathcal {M}}\) is a compact convex set, then the set \({\mathcal {M}}^\#:={\mathbb {P}}^n\setminus \epsilon ({\mathcal {M}}^*)\) is either empty, or a compact convex set. If \({\mathcal {M}}^\#\) is not empty, then the continuity of \(\epsilon \) implies that
-
a point P is on the boundary \(\partial {\mathcal {M}}^\#\) if and only if \(\epsilon (P)\) supports \({\mathcal {M}}\), and
-
a line \(\ell \) supports \({\mathcal {M}}^\#\) if and only if point \(\epsilon (\ell )\) is on the boundary \(\partial {\mathcal {M}}\).
Observe that \(\{\epsilon (X^*):X\in \epsilon (P^*)\}=P^*\), hence a segment \(\overline{PQ}\) given by points \(P,Q\in {\mathbb {P}}^n\) corresponds to the two-edge
that is bounded by the union of the hyperplanes \(\epsilon (P)\) and \(\epsilon (Q)\). We say that a two-edge supports a convex set \({\mathcal {M}}\) if it does not contain any inner point of \({\mathcal {M}}\), and both of its bounding hyperplanes support \({\mathcal {M}}\).
We call a measure \(\mu :2^{{\mathcal {M}}^{*}}\rightarrow {\mathbb {R}}_+\) p-admissible if for every non-collinear triple \(P,Q,R\in {\mathcal {M}}\) of points we have
-
(1)
\(\mu (P^*)=0\) (\(\mu \) is definite),
-
(2)
\(\mu \big (\bigcup _{X\in \overline{PQ}}X^*\big )>0\) (\(\mu \) is positive), and
-
(3)
\(\mu \big (\bigcup _{X\in \overline{PQ}}X^*\cap \bigcup _{Y\in \overline{QR}}Y^*\big )>0\) (\(\mu \) is strict).
Lemma 2.1
Given an elliptic polarity \(\epsilon :{\mathbb {P}}^2\leftrightarrow {\mathbb {P}}^{2*}\) and a convex (maybe empty) \({\mathcal {M}}\subseteq {\mathbb {P}}^2\), a measure \(\mu :2^{{\mathcal {M}}^{*}}\rightarrow {\mathbb {R}}_+\) is p-admissible if and only if \(\mu \circ \epsilon \) is a strictly positive measure on \({\mathbb {P}}^2\) such that \(\mu \circ \epsilon \) vanishes on straight lines.
The easy proof is left to the interested reader. Note however, that in higher dimensions no such easy equivalence exists.
The following observation was originally made by Busemann [6].
Lemma 2.2
Let \({\mathcal {M}}\) be a convex non-empty domain in \({\mathbb {P}}^n\), and let \(\mu \) be a p-admissible measure \(\mu :2^{{\mathcal {M}}^*}\rightarrow {\mathbb {R}}_+\). Then the function \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) defined by \(d(P,Q)=\mu (\bigcup _{X\in \overline{PQ}}X^*)/2\) for every pair of points \(P,Q\in {\mathcal {M}}\) is a projective metric on \({\mathcal {M}}\).
Proof
The function d is clearly non-negative and symmetric, it vanishes if \(P=Q\), and it is positive if \(P\ne Q\), because \(\mu \) is definite and positive. It also satisfies the strict triangle inequality, because
and \(\mu \) is strict. \(\square \)
Given a set \(\Omega \), we call a class of its subsets \({\mathsf {R}}\subset 2^{\Omega }\) a semiring if
-
\(\emptyset \in {\mathsf {R}}\),
-
for any two sets \({\mathcal {A}},{\mathcal {B}}\in {\mathsf {R}}\) the difference set \({\mathcal {B}}\setminus {\mathcal {A}}\) is a finite union of mutually disjoint sets in \({\mathsf {R}}\), and
-
the intersection set \({\mathcal {A}}\cap {\mathcal {B}}\) is in \({\mathsf {R}}\).
The smallest \(\sigma \)-algebra containing \({\mathsf {R}}\) is said to be generated by \({\mathsf {R}}\), and is denoted by \(\sigma ({\mathsf {R}})\).
We say that a set function \(\mu :{\mathsf {R}}\rightarrow [0,\infty ]\) on a semiring \({\mathsf {R}}\subset 2^{\Omega }\) is
-
(i)
additive if \(\mu ({\mathcal {A}}\cup {\mathcal {B}})=\mu ({\mathcal {A}})+\mu ({\mathcal {B}})\) for any pair of disjoint sets \({\mathcal {A}},{\mathcal {B}}\in {\mathsf {R}}\),
-
(ii)
\(\sigma \)-subadditive if \(\mu ({\mathcal {A}})\le \sum _{i=1}^\infty \mu ({\mathcal {A}}_i)\) for any choice of countably many sets \({\mathcal {A}},{\mathcal {A}}_1,\dots ,{\mathcal {A}}_i,\ldots \in {\mathsf {R}}\), where \({\mathcal {A}}\subset \bigcup _{i=1}^\infty {\mathcal {A}}_i\), and
-
(iii)
\(\sigma \)-finite if there exists a sequence \({\mathcal {A}}_1,{\mathcal {A}}_2,\ldots \in {\mathsf {R}}\), such that \(\bigcup _{i=1}^\infty {\mathcal {A}}_i=\Omega \) and \(\mu ({\mathcal {A}}_i)<\infty \) for every \({\mathcal {A}}_i\).
A set function \(\mu :{\mathsf {R}}\rightarrow [0,\infty ]\) on a semiring \({\mathsf {R}}\subset 2^{\Omega }\) is called extendible, if it is additive, \(\sigma \)-subadditive, and \(\sigma \)-finite.
A major tool in this paper is the following variation of Carathéodory’s extension theorem [23]. It uses slightly weaker assumptions.
Theorem 2.3
([9, Theorem 1.53]). Let \({\mathsf {R}}\) be a semiring and let \({{\bar{\mu }}}:{\mathsf {R}}\rightarrow [0,\infty ]\) be an extendible set function with \({{\bar{\mu }}}(\emptyset )=0\). Then there is a unique \(\sigma \)-finite measure \(\mu :\sigma ({\mathsf {R}})\rightarrow [0,\infty ]\), such that \(\mu ({\mathcal {R}})={{\bar{\mu }}}({\mathcal {R}})\) for all \({\mathcal {R}}\in {\mathsf {R}}\).
3 Extendibility of Boundary-Metrics in Dimension Two
Let \({\mathcal {M}}\) be a compact convex non-empty domain in \({\mathbb {P}}^2\). By the triangle inequality, because the diagonal point \(X=\overline{PR}\cap \overline{QS}\) of any convex non-degenerate quadrangle \(\Box (PQRS)\) inscribed in \(\partial {\mathcal {M}}\) falls in \({\mathcal {M}}\), every projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) satisfies the quadrangle inequality
where equality happens only if quadrangle \(\Box (PQRS)\) degenerates to a segment. Notice, that the quadrangle inequality implies immediately the triangle inequality.
The quadrangle inequality (3.1) plays a key role in the next extension theorem on which the rigidity results of this paper are based.
Theorem 3.1
Let \({\mathcal {M}}\subset {\mathbb {P}}^2\) be a compact convex domain. If a continuous bounded distance function \(\delta :\partial {\mathcal {M}}\times \partial {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) satisfies the quadrangle inequality (3.1) for any convex non-degenerate quadrangle \(\Box (PQRS)\) inscribed in \(\partial {\mathcal {M}}\), then it extends to a projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\).
Proof
By Lemmas 2.1 and 2.2, it is enough to construct a measure \(\mu :({\mathbb {R}}^2\setminus {\mathcal {M}}^\#)\rightarrow {\mathbb {R}}_+\) such that \(\delta (P,Q)=\mu \circ \epsilon (\bigcup _{X\in \overline{PQ}}X^*)/2\) for pairs of points \(P,Q\in \partial {\mathcal {M}}\). Since the set \(\epsilon \big (\bigcup _{X\in \overline{PQ}}X^*\big )\) is the two-edge \({\mathcal {E}}(\epsilon (P),\epsilon (Q))\), we need to construct \(\mu \) from knowing it only on two-edge sets supporting \({\mathcal {M}}^\#\).
First we define a positive set function \(\nu \) on a semiring \({\mathsf {R}}\) in several steps. We start with two-edges, triangles and convex quadrangles all of whose side-lines support \({\mathcal {M}}^\#\).
Observe that exactly those two-edges that support \({\mathcal {M}}^\#\) are given in the form \({\mathcal {E}}(\epsilon (P),\epsilon (Q))\). So, by (2.1), if the requisite measure \(\mu \) existed, then it should give \(\delta (P,Q)\) for the two-edge of form \({\mathcal {E}}(\epsilon (P),\epsilon (Q))\). Figure 2 shows what we have.

Two-edge of a chord \(\overline{PQ}\) of \(\partial {\mathcal {M}}\) supports \({\mathcal {M}}^\#\)
Thus, we define
Let \(\triangle (ABC)\) be a triangle with side-lines \(p=AB=\epsilon (P)\), \(q=BC=\epsilon (Q)\), and \(r=CA=\epsilon (R)\), such that \({\mathcal {E}}(p,q)\), \({\mathcal {E}}(q,r)\), and \({\mathcal {E}}(r,p)\) support \({\mathcal {M}}^\#\). Figure 3 shows what we have.

A triangle the side-lines of which support \({\mathcal {M}}^\#\)
Observe that, \({\mathcal {E}}(p,q)\), \({\mathcal {E}}(q,r)\) and \({\mathbb {R}}^2\setminus {\mathcal {E}}(r,p)\) cover the interior of \(\triangle (ABC)\) three times, while they cover lines p, q, r twice and every other point of the plane only once. So, outside lines p, q, r, we have \( 2\chi ^{}_{\triangle (ABC)} =\chi ^{}_{{{\mathcal {E}}}(p,q)}\!+\!\chi ^{}_{{{\mathcal {E}}}(q,r)}\!-\!\chi ^{}_{{{\mathcal {E}}}(r,p)}. \) Therefore, using (3.2), we define
This is clearly non-negative, by the triangle inequality, and vanishes only if \(Q\in \overline{PR}\).
Let \(\Box (ABCD)\) be a convex quadrangle with side-lines \(p=AB=\epsilon (P)\), \(q=BC=\epsilon (Q)\), \(r=CD=\epsilon (R)\), and \(s=DA=\epsilon (S)\), such that \({\mathcal {E}}(p,q)\), \({\mathcal {E}}(q,r)\), \({\mathcal {E}}(r,s)\), and \({\mathcal {E}}(s,p)\) support \(\partial {{\mathcal {M}}}^\#\). Let the diagonal points of \(\Box (ABCD)\) be \(X=AC\cap BD\), \(Y=p\cap r\), and \(Z=q\cap s\). Figure 4 shows what we have.

A quadrangle the side-lines of which support \({\mathcal {M}}^\#\)
Observe, that the side-lines of triangles \(\triangle (YBC)\), \(\triangle (ZDC)\), \(\triangle (YAD)\), and \(\triangle (ZAB)\) also support \({\mathcal {M}}^\#\), hence, using
we obtain from (3.3) that
Notice that this is non-negative because of the quadrangle inequality (3.1).
Let \(\Box (ABCD)\) be a closed quadrangle the side-lines of which support \({\mathcal {M}}^\#\). Then exactly two of the side-lines of \(\Box (ABCD)\) are such that quadrangle \(\Box (ABCD)\) and \({\mathcal {M}}^\#\) are on different sides of the side-line. Such a side-line is called separating side-line. Let \({{\hat{\Box }}}(ABCD)\) denote the quadrangle obtained from \(\Box (ABCD)\) by removing its edges laying on non-separating side-lines. We call these quadrangles half-closed.
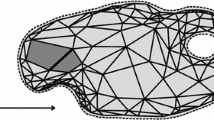
Let \({\mathsf {Q}}\) be the set of the half-closed quadrangles all of whose side-lines support \({\mathcal {M}}^\#\). Let \({\mathsf {R}}\) be the smallest semiring containing \({\mathsf {Q}}\). Then the sets in \({\mathsf {R}}\) are the union of mutually disjoint connected half-closed polygons \({\mathcal {P}}\) all of whose side-lines support \({\mathcal {M}}^\#\) and includes its edge if and only if the side-line of the edge separates \({\mathcal {M}}^\#\) and \({\mathcal {P}}\) in a small neighborhood of the edge. (See Fig. 5!)

A half-closed supporting polygon BCDEGF
The side-lines of any half-closed connected supporting polygon \({\mathcal {P}}\) cut \({\mathcal {P}}\) into finitely many mutually disjoint half-closed supporting quadrangles \({\mathcal {Q}}_i\in {\mathsf {Q}}\) (\(i=1,\dots ,n\)), so we define
As every set \({\mathcal {R}}\in {\mathsf {R}}\) is the union of such mutually disjoint closed polygons \({\mathcal {P}}_j\in {\mathsf {R}}\) (\(j=1,\dots ,\ell \)), we can finish defining \(\nu \) by
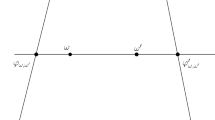
Choose a point C outside \({\mathcal {M}}^\#\) and let r and q be the supporting lines of \({\mathcal {M}}^\#\) through C. These two lines determine two two-edges one of which, say \({\mathcal {E}}_C\) contains \({\mathcal {M}}^\#\). Let \({\mathcal {E}}_C^\dagger \) be the quadrant in \({\mathcal {E}}_C\) that does not contain \({\mathcal {M}}^\#\). Let s be a supporting line of \({\mathcal {M}}^\#\) that contains C and \({\mathcal {M}}^\#\) on the same side. Let \(p\ne s\) be the supporting line of \({\mathcal {M}}^\#\) parallel to s. Let \({\mathcal {L}}_{C;s}\) be the set of points, we call it pointed lane, where \({\mathcal {E}}_C^\dagger \) intersects the strip between s and p. Further, denote \(D_\infty =r\cap s\) and \(B_\infty =q\cap p\). Figure 6 shows what we have.

Pointed lane \({\mathcal {L}}_{C;s}\)
Let \(\nu _{C;s}\) denote the restriction of \(\nu \) onto \({\mathsf {R}}_{C;s}=\{{\mathcal {R}}:{\mathsf {R}}\ni {\mathcal {R}}\subset {\mathcal {L}}_{C;s}\}\).
We claim that \(\nu _{C;s}\) is extendable. The set function \(\nu _{C;s}\) is clearly additive and \(\sigma \)-subadditive, so we only need to prove that it is also \(\sigma \)-finite.
Let points \(D_i\in \overline{CD_\infty }\) and \(B_i\in \overline{CB_\infty }\) (\(i=1,\dots ,\infty \)) be such that \(\overrightarrow{CB_\infty }=i\overrightarrow{B_iB_\infty }\) and \(\overrightarrow{CD_\infty }=i\overrightarrow{D_iD_\infty }\), respectively. Let \(p_i=\epsilon (P_i)\) and \(p_i=\epsilon (P_i)\) be the tangent lines of \({\mathcal {M}}^\#\) such that \(D_i\in s_i\ne r\) and \(B_i\in p_i\ne q\), respectively. Let \(A_i=p_i\cap s_i\).
It is obvious that \(\bigcup _{i=1}^k\Box (A_iB_iCD_i)=\Box (A_kB_kCD_k)\), and \(\bigcup _{i=1}^\infty \Box (A_iB_iCD_i)={\mathcal {L}}_{C;s}\), hence we obtain
by the continuity of metric \(\delta \), \(P=\lim _{k\rightarrow \infty }P_k\), and \(S=\lim _{k\rightarrow \infty }S_k\), where \(q=\epsilon (Q)\), \(r=\epsilon (R)\), \(p=\epsilon (P)\), and \(s=\epsilon (S)\).
Thus, by Theorem 2.3, set function \(\nu _{C;s}\) extends to a \(\sigma \)-finite measure \(\mu _{C;s}\) on \(\sigma ({\mathsf {R}}_{C;s})\), the set of the Borel sets in \({\mathcal {L}}_{C;s}\).
Observe that \(\mu _{C;s}(\Box (ABCD))=\nu (\Box (ABCD))\) for every supporting half-closed quadrangle \(\Box (ABCD)\) in \({\mathsf {R}}_{C;s}\), hence every measure \(\mu _{C;s}\) takes the same value on every quadrangle \(\Box (ABCD)\) which is in the pointed lane \({\mathcal {L}}_{C;s}\), so all such measures are equal on every Borel set in their common domains.
Now we can define the measure \(\mu \) requested in the theorem as follows: Given a Borel set, divide it to disjoint parts so that every part falls in a pointed lane \({\mathcal {L}}_{C;s}\), then measure every such part by the appropriate \(\mu _{C;s}\), and sum up the values (this summation is finite if the Borel set is covered by finitely many lanes, for example if the Borel set is bounded).
To finish the proof we only have to check that \(\delta \) is a restriction of the projective metric d defined from \(\mu \circ \epsilon \) by Lemma 2.2.
Let \(\Box (ABCD)\) be a convex quadrangle with side-lines \(p=AB=\epsilon (P)\), \(q=BC=\epsilon (Q)\), \(r=CD=\epsilon (R)\), and \(s=DA=\epsilon (S)\), such that \({\mathcal {E}}(p,q)\), \({\mathcal {E}}(q,r)\), \({\mathcal {E}}(r,s)\), and \({\mathcal {E}}(s,p)\) support \(\partial {{\mathcal {M}}}^\#\). Observe that
where the first and last equation are proved by the derivation of (3.4). Letting \(Q\rightarrow R\) and \(S\rightarrow P\) in this equality, the continuity of \(\delta \) and d implies \(2\delta (P,R)=2d(P,R)\) that completes the proof. \(\square \)
4 Rigidity by Boundary-Metrics in Dimension Two
In what follows we have a projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) on a compact convex domain \({\mathcal {M}}\). The restriction  of d defined by
of d defined by  is called the boundary-metric. We consider how much of a projective metric is determined by some restrictions of its boundary-metric.
is called the boundary-metric. We consider how much of a projective metric is determined by some restrictions of its boundary-metric.
Theorem 4.1
A projective metric is determined by its boundary-metric.
Proof
By Theorem 3.1, we have a measure \(\mu \circ \epsilon :2^{{\mathcal {M}}^{*}}\rightarrow {\mathbb {R}}_+\), such that \(d(P,Q)=\mu ({\mathcal {E}}(\epsilon (P),\epsilon (Q)))\). So we only need to show that \(\mu \) is determined by the boundary-metric.
Following (3.2), (3.3) and (3.4) we can calculate \(\mu \) for two-edges, triangles and quadrangles with side-lines supporting \({\mathcal {M}}^\#\):



where \(P,Q,R,S\in \partial {\mathcal {M}}\).
Let \({\mathsf {Q}}\) be the set of the half-closed quadrangles all of whose side-lines support \({\mathcal {M}}^\#\). Let \({\mathsf {R}}\) be the smallest semiring containing \({\mathsf {Q}}\). Then the sets in \({\mathsf {R}}\) are the union of mutually disjoint half-closed connected polygons all of whose side-lines support \({\mathcal {M}}^\#\).
The side-lines of any half-closed connected supporting polygon \({\mathcal {P}}\) cut \({\mathcal {P}}\) into finitely many mutually disjoint half-closed supporting quadrangles \({\mathcal {Q}}_i\in {\mathsf {Q}}\) (\(i=1,\dots ,n\)). So we have \( \mu ({\mathcal {P}}):=\sum _{i=1}^n\mu ({\mathcal {Q}}_i). \) As every set \({\mathcal {R}}\in {\mathsf {R}}\) is the union of such mutually disjoint half-closed connected polygons \({\mathcal {P}}_j\in {\mathsf {R}}\) (\(j=1,\dots ,\ell \)), we also have \( \mu ({\mathcal {R}}):=\sum _{j=1}^\ell \mu ({\mathcal {P}}_i). \) Since \(\mu \) is a measure, it is \(\sigma \)-finite in every pointed lane \({\mathcal {L}}_{C;s}\) (see Fig. 6 and the text above it), so \(\mu \) is uniquely determined by its values on \({\mathsf {R}}\) by the unicity part of Carathéodory’s Theorem 2.3.
This proves the theorem. \(\square \)
We can sharpen Theorem 4.1 by digging a hole in \({\mathcal {M}}\). The result resembles the “peeling argument” of [20] in a way.
Theorem 4.2
Let \({\mathcal {N}}\) be a compact convex domain in the interior of \({\mathcal {M}}\). A projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) is determined on \({\mathcal {M}}\setminus {\mathcal {N}}\) by the restriction of its boundary-metric  on chords avoiding \({\mathcal {N}}\).
on chords avoiding \({\mathcal {N}}\).
Proof
By Theorem 3.1, we have a measure \(\mu \circ \epsilon :2^{{\mathcal {M}}^{*}}\rightarrow {\mathbb {R}}_+\), such that \(d(P,Q)=\mu ({\mathcal {E}}(\epsilon (P),\epsilon (Q)))\). As d is given on \(\partial {\mathcal {M}}\times \partial {\mathcal {M}}\), we have (4.1) for every two-edge \({\mathcal {E}}(\epsilon (P),\epsilon (Q))\) that supports \({\mathcal {M}}^\#\) and has vertex in \({\mathcal {N}}^\#\) (See Fig. 7).

A two-edge supporting \({\mathcal {M}}^\#\) and crossing in \({\mathcal {N}}^\#\)
Just as in the proof of Theorem 4.1, we can calculate from this the \(\mu \)-measure of those triangles and quadrangles in \({\mathcal {N}}^\#\setminus {\mathcal {M}}^\#\) that support \({\mathcal {M}}^\#\). Denoting the set of such half-closed quadrangles by \({\mathsf {Q}}\) and considering the semiring \({\mathsf {R}}\) generated by \({\mathsf {Q}}\) one can finish the proof in the same way as the proof of Theorem 4.1 was finished. \(\square \)
We can also “localize” Theorem 4.1 as follows.
Theorem 4.3
Let \({\mathcal {N}}\) be a compact convex domain in the interior of \({\mathcal {M}}\). A projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) is determined on \({\mathcal {N}}\subset {\mathcal {M}}\) by the restriction of the boundary-metric  on chords intersecting \({\mathcal {N}}\).
on chords intersecting \({\mathcal {N}}\).
Proof
By Theorem 3.1, we have a p-admissible measure \(\mu :2^{{\mathcal {M}}^{*}}\rightarrow {\mathbb {R}}_+\), such that \(d(P,Q)=\mu ({\mathcal {E}}(\epsilon (P),\epsilon (Q)))\). As d is given on \(\partial {\mathcal {M}}\times \partial {\mathcal {M}}\), we have (4.1) for every two-edge \({\mathcal {E}}(\epsilon (P),\epsilon (Q))\) that supports \({\mathcal {M}}^\#\) and has vertex outside \({\mathcal {N}}^\#\) (See Fig. 8).

A two-edge supporting \({\mathcal {M}}^\#\) and crossing outside of \({\mathcal {N}}^\#\)
Just as in the proof of Theorem 4.1 we can calculate from this the \(\mu \)-measure of those triangles and quadrangles outside of \({\mathcal {N}}^\#\) that support \({\mathcal {M}}^\#\). Denoting the set of these quadrangles by \({\mathsf {Q}}\) and considering the semiring \({\mathsf {R}}\) generated by \({\mathsf {Q}}\) one can finish the proof in the same way as the proof of Theorem 4.1 was finished. \(\square \)
We can restrict the knowledge on the boundary-metric even more while being able to deduce some partial information on the projective metric. This resembles the Limited Data X-ray Tomography [19].
The following theorem is a clear consequence of Theorem 4.3.
Theorem 4.4
Let \({\mathcal {A}}\) be an open connected arc in \(\partial {\mathcal {M}}\). A projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}_+\) is determined on \({\mathrm{Conv}}{\mathcal {A}}\) by the restriction of its boundary-metric  on chords having an endpoint in \({\mathcal {A}}\).
on chords having an endpoint in \({\mathcal {A}}\).
We have to make it clear here that the projective metric d is not determined on \({\mathcal {M}}\setminus {\mathrm{Conv}}{\mathcal {A}}\). Let the endpoints of \({\mathcal {A}}\) be \(A_\pm \), and the dual lines for these points be \(a_\pm =\epsilon (A_\pm )\), as shown on Fig. 9.

Chords from an arc \({\mathcal {A}}\) and two-edges supporting an arc of \(\partial {\mathcal {M}}^\#\)
The two-edge \({\mathcal {E}}^\dagger \), the complement of \({\mathcal {E}}(a_-,a_+)\), is separated by \({\mathcal {M}}^\#\) into two connected domains \({\mathcal {E}}^\dagger _\pm \). Let \({\mathcal {E}}^\dagger _+\) be the one that is bounded by \(\epsilon ({\mathcal {A}}^*)\), and let \({\mathcal {E}}^\dagger _-\) be the other one, that is bounded by \(\partial {\mathcal {M}}^\#\setminus \epsilon ({\mathcal {A}}^*)\). Domain \({\mathcal {E}}^\dagger _-\) is shown on Fig. 9 with red color. It is clear, that the measure \(\mu \) that corresponds to d is given exactly for those two-edges that support \({\mathcal {M}}^\#\) in \(\epsilon ({\mathcal {A}}^*)\). Therefore, the only information about how \(\mu \) behaves on \({\mathcal {E}}^\dagger _-\) is the function \(\partial {\mathcal {M}}\setminus {\mathcal {A}}\ni S\mapsto \mu (\triangle (AS_+S_-))\), where A is the vertex of \({\mathcal {E}}^\dagger _-\), and points \(S_\pm \) are the intersections of tangents \(a_\pm \) with tangent \(s=\epsilon (S)\).
5 Generalized X-Ray Transform in Dimension Two
Let \({\mathcal {N}}\subseteq {\mathbb {R}}^2\) be a compact connected domain such that a set \({\mathsf {C}}\) of continuous curves in \({\mathcal {N}}\) exists, such that two curves intersect each other in at most one point, and there is a unique curve \({\mathcal {C}}_{P,Q}\in {\mathsf {C}}\) for any two different points \(P,Q\in {\mathcal {N}}\) that contains both points P, Q. The generalized X-ray transform \(\mathrm X^{}_{{\mathsf {C}},\mu }\) maps the functions \(f:{\mathbb {R}}^2\rightarrow {\mathbb {R}}\) integrable on each curve \({\mathcal {C}}_{P,Q}\) into
where \(\mu _{P,Q}\) is a distribution on \({\mathcal {C}}_{P,Q}\). Following [11], the curves \({\mathcal {C}}_{P,Q}\) are called petals, the set \({\mathsf {C}}\) is called flower, and \(\mu _{P,Q}\) is called the weight on the petal \({\mathcal {C}}_{P,Q}\). Identification of such Radon transforms by some partial data is a widely studied subject (see for example [8, 10, 11, 17, 18] etc.). Among the many known results [12,13,14,15, 20] about the boundary-metric rigidity of Riemannian metrics, we find the following to be of particular interest:
Theorem 5.1
Given a compact connected domain \({\mathcal {N}}\subset {\mathbb {R}}^2\), \({\mathrm {X}}^{}_{{{\mathsf {C}}},1}1\) determines the Riemannian metric the geodesics of which are the petals of the flower \({\mathsf {C}}\).
From this point of view our results Theorems 3.1 and 4.1 can be expressed as follows:
Theorem 5.2
Given a compact convex domain \({\mathcal {M}}\subset {\mathbb {R}}^2\), \(\mathrm X^{}_{{{\mathsf {C}}},d}1\) determines the projective metric \(d:{\mathcal {M}}\times {\mathcal {M}}\rightarrow {\mathbb {R}}\) the geodesics of which are the petals of the flower \({\mathsf {C}}\), i.e., the petals are the chords of \(\partial {\mathcal {M}}\).
While these two results sound in a sense dual to each other, if the flower in Theorem 5.1 satisfies the Desargues property [5, p. 67], then Theorem 5.1 follows from Theorem 5.2. The proof is left to the interested reader, we only note that Busemann’s [5, (11.2) Theorem] and [5, (13.1) Theorem] are crucial in the proof.
Notes
This correspondence can be reversed by starting from a general elliptic polarity \(\epsilon \) and determining the unique Euclidean metric \(d_e\) for which \(\epsilon (X)\) is the “equator”.
References
Ambartzumian, R.V.: A note on pseudo-metrics on the plane $2$. Z. Wahrsch. Verw. Gebiete 37, 145–155 (1976). https://doi.org/10.1007/BF00536777
Alexander, R.: Planes for which the Lines are the shortest paths between points. Ill. J. Math. 22, 177–190 (1978)
Beltrami, E.: Risoluzione del problema: riportare i punti di una superficie sopra un piano in modo che le linee geodetiche vengano rappresentate da linee rette, Opere, I (1865), 262–280; Annali di Matematica pura et applicata, serie I, VII (1865), 185–204; https://gallica.bnf.fr/ark:/12148/bpt6k99432q/f287
Busemann, H., Kelly, P.J.: Projective Geometry and Projective Metrics. Academic Press, New York (1953)
Busemann, H.: The Geometry of Geodesics. Academic Press, New York (1955)
Busemann, H.: Geometries in which the planes minimize area. Ann. Mat. Pura Appl. 55, 171–190 (1961). https://doi.org/10.1007/BF02412083
Castelvecchi, D.: Long-awaited mathematics proof could help scan Earth’s innards. Nature 542, 281–282 (2017). https://doi.org/10.1038/nature.2017.21439
Hertle, A.: The identification problem for the constantly attenuated Radon transform. Math. Z. 197, 13–19 (1988). https://doi.org/10.1007/BF01161627
Klenke, A.: Probability Theory: A Comprehensive Course, Universitext. Springer, London (2014). https://doi.org/10.1007/978-1-4471-5361-0
Kurusa, Á.: Translation invariant radon transforms. Math. Balkanica 11, 40–46 (1991)
Kurusa, Á.: Identifying rotational Radon transforms. Period. Math. Hungar. 67, 187–209 (2013). https://doi.org/10.1007/s10998-013-5391-9
Michel, R.: Sur la rigidité imposée par la longueur des géodésiques. Invent. Math. 65, 71–83 (1981). https://doi.org/10.1007/BF01389295
Mukhometov, R.G.: The reconstruction problem of two-dimensional Riemannian metric, and integral geometry. Soviet. Math. Dokl. 18, 27–31 (1977). (in Russian)
Mukhometov, R.G.: A problem of reconstructing a Riemannian metric. Sib. Math. J. 22, 420–433 (1981). https://doi.org/10.1007/BF00969776
Pestov, L., Uhlmann, G.: Two dimensional compact simple Riemannian manifolds are boundary distance rigid. Ann. Math. 161, 1093–1110 (2005). https://doi.org/10.4007/annals.2005.161.1093
Pogorelov, A.V.: Hilbert’s Fourth Problem. Springer, Moscow (1974)
Quinto, E.T.: The dependence of the generalized Radon transform on defining measures. Trans. Am. Math. Soc. 257, 331–346 (1980). https://doi.org/10.2307/1998299
Quinto, E.T.: The invertibility of rotation invariant Radon transforms. Math. Anal. Appl. 91, 510–522 (1983). https://doi.org/10.1016/0022-247X(83)90165-8
Quinto, E.T.: Artifacts and visible singularities in limited data X-ray tomography. Sens Imaging 18(9), 14 (2017). https://doi.org/10.1007/s11220-017-0158-7
Stefanov, P., Uhlmann, G., Vasy, A.: Local and global boundary rigidity and the geodesic X-ray transform in the normal gauge. arXiv 3638, 51 (2017)
Szabó, Z.I.: Hilbert’s fourth problem I. Adv. Math. 59, 185–301 (1986). https://doi.org/10.1016/0001-8708(86)90056-3
Uhlmann, G., Vasy, A.: The inverse problem for the local geodesic ray transform. Invent. Math. 205, 83–120 (2016). https://doi.org/10.1007/s00222-015-0631-7
https://en.wikipedia.org/wiki/Caratheodory’s_extension_theorem; Accessed Wednesday 27th April, 2022
Funding
Open access funding provided by University of Szeged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Á. Kurusa’s research was supported by NFSR of Hungary (NKFIH) under grants K 116451 and KH_18 129630 and by Ministry for Innovation and Technology of Hungary (MITH) under grants TUDFO/47138-1/2019-ITM, NKFIH-1279-2/2020 and TKP2021-NVA-09.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kurusa, Á., Ódor, T. Boundary-Rigidity of Projective Metrics and the Geodesic X-Ray Transform. J Geom Anal 32, 216 (2022). https://doi.org/10.1007/s12220-022-00942-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12220-022-00942-y