
Abstract
This study is involved with a class of three-dimensional system of difference equations incorporating quadratic term, which naturally extends and improve several results in the literature. Firstly, we demonstrate the existence of fixed points, the boundedness, persistence and invariance of positive solution of the mentioned system. Later, for this system, we give the global asymptotic stability at fixed point and the rate of convergence result which play an important role in the discrete dynamical systems. And lastly, some numerical examples are given to validate the effectiveness and feasibility of the theoretical findings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Let’s say that \({\mathbb {N}}_0\) is the set of all nonnegative integers, \({\mathbb {N}}\) is the set of all natural numbers, \({\mathbb {Z}}\) is the set of all integers, \({\mathbb {R}}\) is the set of all real numbers, and for \(k \in {\mathbb {Z}} \) the notation \({\mathbb {N}}_{k}\) denotes the set of \(\{n \in {\mathbb {Z}}:n\ge k \}\).
A popular area of study in applied sciences is nonlinear difference equations or systems of difference equations with order greater than one. In nature, these equations or systems also exist as discrete analogues of numerical solutions of delay differential equations, which represent various phenomena in fields such as biology, geometry, probability theory, stochastic time series, physics, ecology, neural networks and engineering. The behavior of solutions to concrete difference equations or systems of difference equations with orders greater than one, as well as the asymptotic stability of their equilibrium points, have caught the attention of numerous authors recently. For example, in [1], Bešo et al. considered the following nonlinear second order difference equation
where the parameters \(\gamma \), \(\delta \) and the initial conditions \(u_{-i},\) \(i\in \{0,1\},\) are positive real numbers. Boundedness, global attractivity and Neimark-Sacker bifurcation results were obtained. Subsequently, Tasdemir, in [2], generalized some results of Eq. (1) to the following higher-order difference equation
where the parameters \(\mu ,\) \(\eta \) and the initial conditions \(u_{-i},\) \(i\in \{0,1,\dots ,m\},\) are positive real numbers. Also, in [3], the equation in (1) was extended to the following discrete two-dimensional system of difference equations
where the parameters \(\mu ,\) \(\eta \) and the initial conditions \(u_{-i},\) \(v_{-i},\) \(i\in \{0,1\},\) are positive real numbers. Further, Khan, in [4], studied the asymptotic proporties of the following discrete difference equations system
where \({\mathcal {B}}_i,\) for \(i\in \{1,2,3,4\},\) are positive real numbers and the initial conditions \(u_{-j},\) \(v_{-j},\) for \(j\in \{0,1\}\) may be positive or negative real numbers, is a natural generalization of both the equation given in (1) and the system given in (2). Motivated by aforementioned studies, we consider the following nonlinear three-dimensional system of difference equations with quadratic terms
where the parameters \({\mathcal {A}}_i,\) \({\mathcal {B}}_i\), \(i\in \{1,2,3\},\) and the initial conditions \(x_{-j},\) \(y_{-j},\) \(z_{-j},\) \(j\in \{0,1\},\) are positive real numbers. In this paper we study the equilibrium point, the boundedness character, local asymptotic stability and global behavior of equilibrium point of system (5), the rate of convergences of the solutions and confirmation of theoretical results of mentioned system numerically. It is important to note that the results derived from this article are a generalization and extension of above mentioned articles. Other related difference equations and systems of difference equations can be found in references [4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24].
Let us consider a three-dimensional discrete dynamical system with second-order of the following form
where \(f_1:I_{2}\times I_{2}\rightarrow I_1, \) \(f_2:I_{3}\times I_{3} \rightarrow I_2\) and \(f_3:I_{1}\times I_{1} \rightarrow I_3, \) are continuously differentiable functions and \(I_j,\) \(j\in \{1,2,3\},\) are some intervals of real numbers. Moreover, the solution \(\{\left( u_n,v_n,w_n\right) \}_{n=-1}^{\infty }\) of corresponding system is uniquely determined by certain initial conditions.
Definition 1
[25] Let \(f_{i},\) \(i\in \{1,2,3\},\) be continuously differentiable functions at the equilibrium \(\left( \bar{u},\bar{v},\bar{w}\right) \) that is an equilibrium point of the map \(\Phi .\) The linearized system of (6) about the equilibrium point \(\left( \bar{u},\bar{v},\bar{w}\right) \) is
where \(U_n=\left( u_n,u_{n-1},v_n,v_{n-1},w_n,w_{n-1}\right) ^{T}\) and \({\mathcal {F}}_{J}\) is a Jacobian matrix of system (6) related to equilibrium point \(\bar{U}=\left( \bar{u},\bar{v},\bar{w}\right) \).
Theorem 1
[17] Consider system (7), where \(\bar{U}\) is a fixed point of \(\Phi \). If all eigenvalues of the Jacobian matrix \({\mathcal {F}}_J\) about \(\bar{U}\) lie inside the open unit disk \(\Vert \rho \Vert <1,\) that is, if all of them have absolute value less than one, then \(\bar{U}\) is locally asymptotically stable. If at least one of the eigenvalues has a modulus greater than 1, than \(\bar{U}\) is unstable.
2 Linearized stability system
First of all, by employing the change of variables \(\alpha _{n}=\frac{x_{n}}{{\mathcal {A}}_1},\ \beta _{n}=\frac{y_{n}}{{\mathcal {A}}_2}, \ \gamma _{n}=\frac{z_{n}}{{\mathcal {A}}_3}\), for \(n\ge -1\), system (5) becomes
where
From here on, we will study on the equivalent system (8).
Lemma 1
System (8) has two equilibrium points \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \) and \(\Gamma _2=\left( \xi _{21},\xi _{22},\xi _{23}\right) \), where
and
Proof
Let \(\Gamma =\left( \bar{\alpha },\bar{\beta },\bar{\gamma }\right) \) be equilibrium point of system (8). Then, from system (8), we have
from which it follows that
By substituting the second equation in (13) into the third one in (13) and then the first equation in (13) into the third one in (13), it follows that
whose roots are
where \(p=\frac{{\mathcal {B}}_1}{{\mathcal {A}}_1{\mathcal {A}}_2}>0\), \(q=\frac{{\mathcal {B}}_2}{{\mathcal {A}}_2{\mathcal {A}}_3}>0\) and \(r=\frac{{\mathcal {B}}_3}{{\mathcal {A}}_1{\mathcal {A}}_3}>0\). Similarly, by substituting the third equation in (13) into the first one in (13) and then the second equation in (13) into the first one in (13), by keeping in mind the truth of (9) and after manipulation, we get
whose roots are
where \(p=\frac{{\mathcal {B}}_1}{{\mathcal {A}}_1{\mathcal {A}}_2}>0\), \(q=\frac{{\mathcal {B}}_2}{{\mathcal {A}}_2{\mathcal {A}}_3}>0\) and \(r=\frac{{\mathcal {B}}_3}{{\mathcal {A}}_1{\mathcal {A}}_3}>0\). Analogously, by substituting the first equation in (13) into the second equation in (13) and the third equation in (13) into the second equation in (13), later by keeping in mind the truth of (9) and, finally, after manipulation, we have
whose roots are
where \(p=\frac{{\mathcal {B}}_1}{{\mathcal {A}}_1{\mathcal {A}}_2}>0\), \(q=\frac{{\mathcal {B}}_2}{{\mathcal {A}}_2{\mathcal {A}}_3}>0\) and \(r=\frac{{\mathcal {B}}_3}{{\mathcal {A}}_1{\mathcal {A}}_3}>0\). From (15), (17) and (19), one deduces that system (8) has two equilibrium points such as \(\Gamma _1=\left( \bar{\alpha },\bar{\beta },\bar{\gamma }\right) =\left( \xi _{11},\xi _{12},\xi _{13}\right) \) and \(\Gamma _2=\left( \bar{\alpha },\bar{\beta },\bar{\gamma }\right) =\left( \xi _{21},\xi _{22},\xi _{23}\right) \), where is described in (10) and (11). \(\square \)
Now, we will carry out the linearized form of system (8) related to the equilibrium point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \). Firstly, we will write system (8) in vectorial form. To do this, we define the function \({\mathcal {F}}:\left( 0,\infty \right) ^{6}\rightarrow \left( 0,\infty \right) ^{6}\) by
where \(X=\left( u_1,u_2,v_1,v_2,w_1,w_2\right) ,\) \(g_1\left( X\right) =1+p\frac{v_1}{v_2^{2}},\) \(g_2\left( X\right) =1+q\frac{w_1}{w_2^{2}}\) and \(g_3\left( X\right) =1+r\frac{u_1}{u_2^{2}}.\) From (20), one can write the vector form and linearized form of system (8) as follows
where \(X_n=\left( u_n,u_{n-1},v_n,v_{n-1},w_n,w_{n-1}\right) ^{T}\) and \({\mathcal {J}}\mid _{\Gamma }\) is a Jacobian matrix of the system (8) about equilibirum point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \), which is given by
3 Boundedness and persistence of system (8)
In the following result, we prove that system (8) is bounded and persists.
Theorem 2
If \(pqr<1,\) then the solution \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) of system (8) is bounded and persists.
Proof
Let \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) be a positive solution of system (8). Then, from (8) we have
Further, from (23) and system (8), the following inequalities can be easily obtained
From the first inequality in (24) one has
such that \({\hat{\alpha }}_{j}=\alpha _{j}\), \(j\in \{-1,0,\dots ,3\},\) whose solution is
where \(C_{1i}\), for \(i \in \{1,2,3\}\), are bounded up with \({\hat{\alpha }}_{-j}\), for \(j \in \{-1,0,1\}\). From the second inequality in (24) one gets
such that \({\hat{\beta }}_{j}=\beta _{j}\), \(j\in \{-1,0,\dots ,3\},\) whose solution is
where \(C_{2i}\), for \(i \in \{1,2,3\}\), are bounded up with \({\hat{\beta }}_{-j}\), for \(j \in \{-1,0,1\}\). Similarly, from the third equality in (24) one obtains
such that \({\hat{\gamma }}_{j}=\gamma _{j}\), \(j\in \{-1,0,\dots ,3\},\) whose solution is
where \(C_{3i}\), for \(i \in \{1,2,3\}\), are depicted in \({\hat{\gamma }}_{-j}\), for \(j \in \{-1,0,1\}\). By considering \({\hat{\alpha }}_{j}=\alpha _{j}\), \({\hat{\beta }}_{j}=\beta _{j}\), and \({\hat{\gamma }}_{j}=\gamma _{j}\), for \(j\in \{-1,0,\dots ,3\},\) and from the assumption \(pqr<1\), then one has the following inequalities
from which along with (23), it follows that
\(\square \)
Theorem 3
System (8) has an invariant interval when \(0<pqr<1.\) Further the set \([1,\frac{1+p+pq}{1-pqr}]\times [1,\frac{1+q+qr}{1-pqr}]\times [1,\frac{1+r+pr}{1-pqr}]\) is an invariant.
Proof
Assume that \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) is the solution of system (8) such that \(\alpha _{-i} \in [1,\frac{1+p+pq}{1-pqr}], \) \(\beta _{-i} \in [1,\frac{1+q+qr}{1-pqr}] \) and \(\gamma _{-i}\in [1,\frac{1+r+pr}{1-pqr}]\), for \(i\in \{ 0,1\}.\) Then, from system (8) and equalities in (23) one gets
from which deduce that \(\alpha _1 \in [1,\frac{1+p+pq}{1-pqr}], \) \(\beta _1 \in [1,\frac{1+q+qr}{1-pqr}] \) and \(\gamma _1 \in [1,\frac{1+r+pr}{1-pqr}].\) Finally, by using induction method, one easily shows that \(\alpha _{k+1} \in [1,\frac{1+p+pq}{1-pqr}], \) \(\beta _{k+1} \in [1,\frac{1+q+qr}{1-pqr}] \) and \(\gamma _{k+1} \in [1,\frac{1+r+pr}{1-pqr}] \) if \(\alpha _{k} \in [1,\frac{1+p+pq}{1-pqr}], \) \(\beta _{k} \in [1,\frac{1+q+qr}{1-pqr}] \) and \(\gamma _{k} \in [1,\frac{1+r+pr}{1-pqr}]. \) \(\square \)
4 Stability analysis of system (8)
The global attractivity and the local asymptotic stability of the equilibrium point given in (10) of system (8) will be addressed in this section. Also, the globally asymptotic result will be presented by using the gained results.
Theorem 4
If the following condition
where \(\Delta =\left( 1+p+q-r\right) ^2+4\left( 1+p\right) \left( 1+q\right) r\), holds, then the equilibrium point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \) of system (8) is locally asymptotically stable.
Proof
From (21), the linearized equation of system (8) about equilibrium point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \) is
where \(X_n=\left( u_n,u_{n-1},v_n,v_{n-1},w_n,w_{n-1}\right) ^{T}\) and
where \(\Delta =\left( 1+p+q-r\right) ^2+4\left( 1+p\right) \left( 1+q\right) r.\) Let \(\lambda _{i},\) for \(i\in \{1,2,\dots ,6\},\) be the eigenvalues of \({\mathcal {J}}\mid _{\Gamma _1}\). From (34) we can choose an \(\epsilon >0\) such that
where \(\Delta =\left( 1+p+q-r\right) ^2+4\left( 1+p\right) \left( 1+q\right) r.\) If
then
where \(\Delta =\left( 1+p+q-r\right) ^2+4\left( 1+p\right) \left( 1+q\right) r.\) Then, we can obtain the next norm of the matrix \({\mathcal {D}}^{-1}{\mathcal {J}}\mid _{\Gamma _1}{\mathcal {D}}\) as
Since \(\epsilon <1\) and the inequality in (37) satisfies, we can write the following inequalities
Since \({\mathcal {J}}\mid _{\Gamma _1}\) possesses the same eigenvalues as \({\mathcal {D}}^{-1}{\mathcal {J}}\mid _{\Gamma _1}{\mathcal {D}},\) we have that \(|\lambda _i|\le \Vert {{\mathcal {D}}^{-1}{\mathcal {J}}\mid _{\Gamma _1}{\mathcal {D}}} \Vert <1,\) where \(\lambda _i,\) for \(i\in \{1,2,\dots ,6\},\) are the eigenvalues of \({\mathcal {J}}\mid _{\Gamma _1}\). From Theorem (1), the equilibrium point given in (10) of system (8) is locally asymptotically stable, which is desired. \(\square \)
Theorem 5
Assume that \(p,q,r \in \left( 0,\frac{1}{2}\right) \). Then, the equilibrium point \(\Gamma _1\) of system (8) is global attractor.
Proof
Let \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) be a positive solution of system (8) and be \(p,q,r \in \left( 0,\frac{1}{2}\right) \). From Theorem (2), there exists
where \(U_1,U_2, U_3, l_1, l_2, l_3 \in \left( 0,\infty \right) . \) Then, from system (8) and the relations in (42), one gets the following inequalities
from which it follows that
By multiplying both sides of inequality in (44) by \(U_3\) and both sides of inequality in (49) by \(U_2\), one has
from which it follows that
Similarly, multiplying both sides of inequality in (45) by \(U_1\) and both sides of inequality in (47) by \(U_3\), one gets
from which it follows that
Analogously, multiplying both sides of inequality in (46) by \(U_2\) and both sides of inequality in (48) by \(U_1\), one obtains
from which it follows that
From (50), (51) and (52), one can write
which implies that
and consequently
From (55) and after some basic calculation, one has
From the fact that \(1\le l_1,\) \(1\le l_2,\) \(1\le l_3\) and from the assumption \(p,q,r \in \left( 0,\frac{1}{2}\right) \), then one gets
from which it follows that
and so, \(U_1=l_1\), \( U_2=l_2\) and \(U_3=l_3\), which completes the proof. \(\square \)
Taking into account Theorem (4) and Theorem (5), the following theorem gives the main result of this article.
Theorem 6
If the condition in (34) and \(p,q,r \in \left( 0,\frac{1}{2}\right) \) are hold, then the equilibrium point given in (10) of system (8) is globally asymptotically stable.
5 Rate of convergence
In this section, we study the rate of convergence of a solutions which converges to the equilibrium point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \) of the system (8) in the region of parameters described by \(p,q,r \in \left( 0,\infty \right) .\) The following result gives the rate of convergence of solutions of difference equations system
where \(\Psi _n\) is a k-dimensional vector, \(M\in C^{k\times k}\) is a constant matrix and \(N:{\mathbb {Z}}^+\rightarrow C^{k\times k}\) is a matrix function with
where \(\Vert .\Vert \) denotes any matrix norm.
Theorem 7
(Perron’s Theorem, see, [26]) Assume that condition in (60) holds. If \(\Psi _n\) is a solution of (59), then either \(\Psi _n=0\) for all large n or
or
exists and \(\vartheta \) is equal to the modulus of one of the eigenvalues of matrix M.
Theorem 8
Assume that \(p,q,r \in \left( 0,\frac{1}{2}\right) \) and the solution \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) of system (8) tends to \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \). Then, the error vector
of every solution of system (8) satisfies both of the asymptotic relations
where \(\vartheta \) is equal to the modulus of one of the eigenvalues of \(\mathcal {J_F}\) about \(\left( \xi _{11},\xi _{12},\xi _{13}\right) \). and \(\lambda _{1,2,3,4,5,6}J_F\left( \xi _{11},\xi _{12},\xi _{13}\right) \) are the characteristic roots of the Jacobian matrix \(\mathcal {J_F}\left( \xi _{11},\xi _{12},\xi _{13}\right) \).
Proof
Let \(\{\left( \alpha _n,\beta _n,\gamma _n\right) \}_{n=-1}^{\infty }\) be a positive solution of system (8) such that the following conditions hold
In order for the error terms of system, from (12) with depicting on \(\Gamma _1= \left( \bar{\alpha },\bar{\beta },\bar{\gamma }\right) =\left( \xi _{11},\xi _{12},\xi _{13}\right) \), one has
Set
where \(a_{11}=\frac{p}{\beta _{n-1}^2},\) \(a_{12}=-\frac{p\left( \beta _{n-1}+\xi _{12}\right) }{\xi _{12}\beta _{n-1}^2},\) \(a_{21}=\frac{q}{\gamma _{n-1}^2},\) \(a_{22}=-\frac{q\left( \gamma _{n-1}+\xi _{13}\right) }{\xi _{13}\gamma _{n-1}^2},\) \(a_{31}=\frac{r}{\alpha _{n-1}^2}\) and \(a_{32}=-\frac{r\left( \alpha _{n-1}+\xi _{11}\right) }{\xi _{11}\alpha _{n-1}^2},\) from which it follows that
That is,
where \(\rho _{ij}\rightarrow 0\) as \(n \rightarrow \infty .\) Then, one possesses the following system of the form in (59)
where \({\mathcal {E}}_n=\left( e_n^1,e_{n-1}^1,e_n^2,e_{n-1}^2,e_n^3,e_{n-1}^3\right) ^T\) and
where \( \Vert N(n)\Vert \rightarrow 0\) as \(n\rightarrow \infty \). The matrix M is equal to \(\mathcal {J_F}\left( \xi _{11},\xi _{12},\xi _{13}\right) \). So, by using Theorem (7) to system (8), the result easily follows. \(\square \)
6 Numerical simulations
In this section, we verify the above mathematical discussion and represent some interesting dynamical properties of system (8) through numerical simulations. For this, certain parametric values are taken into account for system (8).
Example 1
Consider system (8) with \(p=0.49,\) \(q=0.48,\) \(r=0.41\). Then, system (8) can be written as
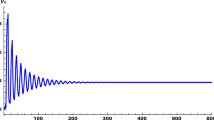
with the initial conditions \(x_{-1}=21.2,\) \(x_{0}=0.8,\) \(y_{-1}=9.2,\) \(y_{0}=7.3,\) \(z_{-1}=2.71,\) \(z_{0}=6.47.\) From Theorem (5), one easily sees that every positive solution of system (8) is bounded and the equilibrium point \(\Gamma _1=\left( 1.35801,1.36869,1.30191\right) \) of system (69) is global attractor (See, Figs. 1 and 2).

Plot of \(\alpha _n,\) \(\beta _n\) and \(\gamma _n\) in system (69) with \(p,q,r\in \left( 0,\frac{1}{2}\right) .\)

Plot of attractor of system (69) with \(p,q,r\in \left( 0,\frac{1}{2}\right) .\)
Example 2
Consider system (8) with \(p=1.7,\) \(q=0.6,\) \(r=3.4\). Then, system (8) can be written as
with the initial conditions \(x_{-1}=4.2,\) \(x_{0}=5.1,\) \(y_{-1}=0.6,\) \(y_{0}=3.1,\) \(z_{-1}=0.6,\) \(z_{0}=14.6.\) The the positive equilibrium point \(\Gamma _1=\left( 2.36426,1.2461,2.43808\right) \) of system (70) is not global attractor. (See, Figs. 3 and 4).

Plot of \(\alpha _n,\) \(\beta _n\) and \(\gamma _n\) in system (70)

The plot of system (70) with \(p,r\notin \left( 0,\frac{1}{2}\right) \) and \(q\in \left( 0,\frac{1}{2}\right) \)
7 Conclusion
This study represents a contribution to the analysis of three-dimensional concrete nonlinear system of difference equations, with arbitrary constant and different parameters. This paper mainly discusses the dynamic properties of a class of second-order system of difference equations by utilizing stability theory and rate of convergence. The main results are as follows.
-
i.
When \(pqr<1\), then the solution of system (8) is bounded and persists. Further for under this condition, system (8) has an invariant interval.
-
ii.
When \( \frac{12r\left( 1+q\right) ^2}{\left( 1+p+q-r+\sqrt{\Delta }\right) ^2}<1,\) \(\frac{12p\left( 1+r\right) ^2}{\left( 1-p+q+r+\sqrt{\Delta }\right) ^2}<1\) and \(\frac{12q\left( 1+p\right) ^2}{\left( 1+p-q+r+\sqrt{\Delta }\right) ^2}<1\), where \(\Delta =\left( 1+p+q-r\right) ^2+4\left( 1+p\right) \left( 1+q\right) r\), then the equilibrium point \(\Gamma _1=\left( \xi _{11},\xi _{12},\xi _{13}\right) \) of system (8) is locally asymptotic stable.
-
iii.
When \(p,q,r \in \left( 0,\frac{1}{2}\right) \), then the equilibrium point \(\Gamma _1\) of system (8) is global attractor.
The results imply that this approach might also be helpfully expanded to \(k-\)dimensional system of difference equations, or to system of difference equations with higher-order, or to system of difference equations with arbitrary powers. Thereby, we are going to offer a significant unresolved problem for scholars studying difference equations theory.
Open Problem. One can study the dynamical proporties of the following \(k-\)dimesional system of difference equations with quadratic terms
where \(n\in {\mathbb {N}}_0,\) \(k\in {\mathbb {N}}_4,\) the parameters \({\mathcal {A}}_i,\) \({\mathcal {B}}_i,\) for \(i\in \{1,2,\dots ,k\},\) and the initial conditions \(x_{-j}^{\left( i\right) },\) for \(i\in \{1,2,\dots ,k\}\) and \(j\in \{0,1\},\) are positive real numbers.
References
Bešo, E., Kalabušić, S., Mujić, N., Pilav, E.: Boundedness of solutions and stability of certain second-order difference equation with quadratic term. Adv. Differ. Equ. 2020(1), 1–22 (2020)
Taşdemir, E.: Global dynamics of a higher order difference equation with a quadratic term. J. Appl. Math. Comput. 1–15 (2021)
Taşdemir, E.: On the global asymptotic stability of a system of difference equations with quadratic terms. J. Appl. Math. Comput. 66, 423–437 (2021)
Khan, A.Q., et al.: Global dynamics of a nonsymmetric system of difference equations. Math. Prob. Eng. 2022 (2022)
Abualrub, S., Aloqeili, M.: Dynamics of positive solutions of a system of difference equations. J. Comput. Appl. Math. 392, 113489 (2021)
Abu-Saris, R.M., DeVault, R.: Global stability of \(y_{n+1}=A+\frac{y_n}{y_{n-1}}\). Appl. Math. Lett. 16(2), 173–178 (2003)
Bao, H., et al.: Dynamical behavior of a system of second-order nonlinear difference equations. Int. J. Differ. Equ. 2015 (2015)
Din, Q.: Dynamics of a discrete Lotka–Volterra model. Adv. Differ. Equ. 2013, 1–13 (2013)
Gümüş, M.: The global asymptotic stability of a system of difference equations. J. Differ. Equ. Appl. 24(6), 976–991 (2018)
Gümüş, M.: Global asymptotic behavior of a discrete system of difference equations with delays. Filomat 37(1), 251–264 (2023)
Khan, A.Q., Sharif, K.: Global dynamics, forbidden set, and transcritical bifurcation of a one-dimensional discrete-time laser model. Math. Methods Appl. Sci. 43(7), 4409–4421 (2020)
Amira, K., Yacine, H.: Global behavior of p-dimensional difference equations system. Electron. Res. Arch. 29(5), 3121–3139 (2021)
Kulenovic, M.R., Ladas, G.: Dynamics of Second Order Rational Difference Equations: With Open Problems and Conjectures. CRC Press, Boca Raton (2001)
Abd El-Moneam, M.: Global asymptotic stability of a system of difference equations with quadratic terms. Commun. Adv. Math. Sci. 6(1), 31–43 (2023)
Papaschinopoulos, G., Schinas, C.: On a system of two nonlinear difference equations. J. Math. Anal. Appl. 219(2), 415–426 (1998)
Papaschinopoulos, G., Schinas, C.: On the system of two nonlinear difference equations \(x_{n+1}= A+\frac{x_{n-1}}{y_n}, y_{n+1}= A+ \frac{y_{n- 1}}{x_n}\). Int. J. Math. Math. Sci. 23(12), 839–848 (2000)
Sedaghat, H.: Nonlinear Difference Equations: Theory with Applications to Social Science Models, vol. 15. Springer, Berlin (2013)
Taskara, N., Tollu, D., Yazlik, Y.: Solutions of rational difference system of order three in terms of Padovan numbers. J. Adv. Res. Appl. Math. 7(3), 18–29 (2015)
Tollu, D., Yazlik, Y., Taskara, N.: Behavior of positive solutions of a difference equation. J. Appl. Math. Inf. 35(3), 217–230 (2017)
Zhang, D., Ji, W., Wang, L., Li, X.: On the symmetrical system of rational difference equation \(x_{n+1}=A+\frac{y_{n-k}}{y_n}, y_{n+1}=A+\frac{x_{n-k}}{x_n}\). Appl. Math. 4, 834–837 (2013)
Huang, C., Liu, B., Yang, H., Cao, J.: Positive almost periodicity on SICNNs incorporating mixed delays and D operator. Nonlinear Anal. Modell. Control 27(4), 719–739 (2022)
Zhao, X., Huang, C., Liu, B., Cao, J.: Stability analysis of delay patch-constructed Nicholson’s blowflies system. Mathematics and Computers in Simulation (2023)
Huang, C., Liu, B., Qian, C., Cao, J.: Stability on positive pseudo almost periodic solutions of HPDCNNs incorporating D operator. Math. Comput. Simul. 190, 1150–1163 (2021)
Merve, K., Yazlik, Y., Tollu, D.T.: Solvability of a system of higher order nonlinear difference equations. Hacettepe J. Math. Stat. 49(5), 1566–1593 (2020)
Kocic, V.L., Ladas, G.: Global Behavior of Nonlinear Difference Equations of Higher Order with Applications, vol. 256. Springer, Berlin (1993)
Pituk, M.: More on Poincaré’s and Perron’s theorems for difference equations. J. Differ. Equ. Appl. 8(3), 201–216 (2002)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that there is no Conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yazlık, Y., Fidancı, M.C. & Hassani, M.K. Stability analysis of a three-dimensional system of difference equations with quadratic terms. J. Appl. Math. Comput. 70, 2521–2539 (2024). https://doi.org/10.1007/s12190-024-02057-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-024-02057-9