
Abstract
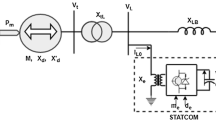
This article introduces a novel strategy for devising an optimal Static Synchronous Compensator (STATCOM) controller via Hamiltonian function method in mitigating the transient stability of a multimachine power system. The STATCOM, a second generation shunt type FACTS device, is popularly employed for power system control. To test the applicability of the Hamiltonian function approach, an IEEE Type WSCC 9-bus system is taken under study. An appropriate Hamiltonian functional has been framed using the parameters of the test system, which is applied to optimize the preferred performance index. The performance of the proposed nonlinear controller is judged against a regular state feedback based STATCOM controller. The parameters of this traditional controller are computed via dynamical Games of the Nash Equilibrium method. The proposed method is beneficial in terms of mathematical complexity as needed in estimating relative degree and coordinate transformation in the feedback linearization method. A detailed investigation of the results reveals that the proposed controller is effective and efficient to a greater degree than the traditional STATCOM controller in a multimachine system, even at some point in serve eventualities like earth fault scenarios.





Similar content being viewed by others

References
Anderson M P and Fouad A A 2002 Power system control and stability. 2nd ed. Wiley-IEEE Press
Kundur P, Klein M, Rogers G and Zywno M 1989 Application of power system stabilizers for enhancement of overall system stability. IEEE Trans. Power Syst. 4: 614–626
Ghosh A, Ledwich G, Malik O and Hope G 1984 Power system stabilizer based on adaptive control techniques. IEEE Trans. Power Appar. Syst. PAS-103: 1983–1989
Wang Y, Hill D, Middleton R and Gao L 1993 Transient stability enhancement and voltage regulation of power systems. IEEE Trans. Power Syst. 8: 620–627
Mahmoudi M, Dong J, Tomsovic K and Djouadi S 2015 Application of distributed control to mitigate disturbance propagations in large power networks. In: North American Power Symp. IEEE: 1–6
Elsisi M and Ebrahim M A 2021 Optimal design of low computational burden model predictive control based on SSDA towards autonomous vehicle under vision dynamics. Int. J. Intell. Syst. 36: 6968–6987
Elsisi M 2020 Optimal design of nonlinear model predictive controller based on new modified multitracker optimization algorithm. Int. J. Intell. Syst. 35: 1857–1878
Ramirez J M and Castillo I 2004 PSS and FDS simultaneous tuning. Electr. Power Syst. Res. 68: 33–40
Chen C P, Malik O P, Qin Y H and Xu G Y 1992 Optimization techniques for the design of a linear optimal Power System Stabilizers. IEEE Trans. Energy Convers. 7: 453–459
Kumar A 2016 Power system stabilizers design for multimachine power systems using local measurements. IEEE Trans. Power Syst. 31: 2163–2171
Li C, Du Z, Ni Y and Zhang G 2016 Reduced model-based coordinated design of decentralized power system controllers. IEEE Trans. Power Syst. 31: 2172–2181
Singh A K and Pal B C 2016 Decentralized control of oscillatory dynamics in power systems using an extended LQR. IEEE Trans. Power Syst. 31: 1715–1728
Wu X, Dorfler F and Jovanovic M R 2016 Input-output analysis and decentralized optimal control of inter-area oscillations in power systems. IEEE Trans. Power Syst. 31: 2434–2444
Elsisi M, Tran M Q, Hasanien H M, Turky R A, Albalawi F and Ghoneim S S M 2021 Robust model predictive control paradigm for automatic voltage regulators against uncertainty based on optimization algorithms. Mathematics 9: 2885–2904
Elsisi M, Soliman M, Aboelela M and Mansour W 2015 ABC based design of PID controller for two area load frequency control with nonlinearities. TELKOMNIKA Indones. J. Electr. Eng. 16: 58–64
Huang R, Zhang J and Lin Z 2017 Decentralized adaptive controller design for large-scale power systems. Automatica. 79: 93–100
Yang J, Chen Z, Mao C, Wang D, Lu J and Sun J 2014 Analysis and assessment of VSC excitation system for power system stability enhancement. Electr. Power Energy Syst. 57: 350–357
Elsisi M and Abdelfattah H 2020 New design of variable structure control based on lightning search algorithm for nuclear reactor power system considering load-following operation. Nuclear Eng. Technol. 52: 544–551
Nguimfack-Ndongmo J D, Kenne G, Kuate-Fochie R, Cheukem A, Fotsin H B and Lamnabhi-Lagarrigue F 2014 A simplified nonlinear controller for transient stability enhancement of multimachine power systems using SSSC device. Electr. Power Energy Syst. 54: 650–657
Karthikeyan K and DhalKumar P 2018 Optimal location of STATCOM based dynamic stability analysis tuning of PSS using particle swarm optimization. Mater. Today: Proc. 5: 588–595
Alam Md S, Shafiullah Md, HossainI Md and Hasan N Md. 2015 Enhancement of power system damping employing TCSC with genetic algorithm based controller design. In: 2nd Int’l Conf. On Electrical Engineering and Information & Communication Technology (ICEEICT), Dhaka, 21–23 May
Messalti S, Boudjellal B and Said A 2015 Artificial neural networks controller for power system voltage improvement. In: IREC2015 The Sixth International Renewable Energy Congress. IEEE
Mohanty A and Viswavandya M 2015 A novel ANN based UPFC for voltage stability and reactive power management in a remote hybrid system. Procedia Comput. Sci. 48: 555–560
Abdel-Magid Y L and Abido M A 2004 Robust coordinated design of excitation and TCSC-based stabilizer using genetic algorithms. Electr. Power Syst. Res. 69: 129–141
Ali E S and Abd-Elazim S M 2012 Coordinated design of PSSs and TCSC via bacterial swarm optimization algorithm in multimachine power system. Electr. Power Energy Syst. 36: 84–92
Elsisi M 2022 Improved grey wolf optimizer based on opposition and quasi learning approaches for optimization: case study autonomous vehicle including vision system. Artif. Intell. Rev. 55: 5597–5620
Ismail M M, Bendary A F and Elsisi M 2020 Optimal design of battery charge management controller for hybrid system PV/wind cell with storage battery. Int. J. Power Energy Convers. 11: 412–429
Elsisi M 2021 Optimal design of non-fragile PID controller. Asian J. Control. 23: 729–738
Yaghooti A, Buygi M O and Shanechi M H M 2016 Designing coordinated power system stabilizers: a reference model based controller design. IEEE Trans. Power Syst. 31: 2914–2924
Liu Y, Wu Q H and Zhou X X 2016 Coordinated switching controllers for transient stability of multi-machine power systems. IEEE Trans. Power Syst. 31: 3937–3949
Gu L and Wang J 2007 Nonlinear coordinated control design of excitation and STATCOM of power systems. Electr. Power Syst. Res. 77: 788–796
Halder A, Pal N and Mondal D 2018 Transient stability analysis of a multimachine power system with TCSC controller—A zero dynamic design approach. Electr. Power Energy Syst. 97: 51–71
Li S and Wang Y 2007 Robust adaptive control of synchronous generators with SMES unit via Hamiltonian function method. Int. J. Syst. Sci. 38: 187–196
Nazaripouya H and Mehraeen S 2012 Control of UPFC using Hamilton-Jacobi-Bellman formulation based neural network. In: IEEE Power and Energy Society General Meeting, San Diego, CA, USA
Halder A, Mondal D and Pal N 2018 Nonlinear Optimal STATCOM Controller for Power System based on Hamiltonian Formalism. In: IEEE Int. Conf. on Power Electronics Drives and Energy Systems. Madras. India. 18–20 Dec
Sun Y Z, Liu Q J, Song Y H and Shen T L 2002 Hamiltonian modelling and nonlinear disturbance attenuation control of TCSC for improving power system stability. IEE Proc. Control Theory Appl. 149: 278–284
Zairong X, Cheng D, Lu Q and Mei S 2002 Nonlinear decentralized controller design for multimachine power systems using Hamiltonian function method. Automatica. 38: 527–534
Liu Q J, Sun Y Z, Shen T L and Song Y H 2003 Adaptive nonlinear coordinated excitation and STATCOM controller based on Hamiltonian structure for multimachine-power-system stability enhancement. IEE Proc. Control Theory Appl. 150: 285–294
Wei Y B and Yang W J 2013 Nonlinear control of SVG based on Hamiltonian energy theory. Appl. Mech. Mater. 331: 307–310
Bangjun L and Shumin F 2014 A brand new nonlinear robust control design of SSSC for transient stability and damping improvement of multi-machine power systems via pseudo-generalized Hamiltonian theory. Control Eng. Pract. 29: 147–157
Machado E and Pessanha J E O 2019 Hamiltonian energy-balance method for direct analysis of power systems transient stability. IET Gener. Transm. Distrib. 13: 1895–1905
Halder A, Mondal D and Pal N 2018 Nonlinear optimal STATCOM controller for power system based on Hamiltonian formalism. In: 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES). Madras, 18–21 Dec
Mondal D and Halder A 2016 Nonlinear Optimal STATCOM controller based on game theory to improve transient stability. In: 2nd International Conference on Control, Instrumentation, Energy and Communication, Kolkata, Jan 28–30
Mondal D, Chakraborty A and Sengupta A 2020 Power system small signal stability analysis and control. 2nd edn. Academic Press, Elsevier, USA
Lu Q, Sen Y and Mei S 2001 Nonlinear control systems and power system dynamics. Kluwer Academic Publishers, USA.
Khodabakhshian A, Morshad M J and Parastegari M 2013 Coordinated design of STATCOM and excitation system controllers for multi-machine power systems using zero dynamic method. Int. J. Electr. Power Energy Syst. 49: 269–279
Basar T and Olsder G J 1982 Dynamic Noncooperative Game Theory, Mathematics in Science and Engineering, Academic Press, vol. 160
Author information
Authors and Affiliations
Corresponding author
Appendix 1
Appendix 1
1.1 Detailed derivation of IEEE-9 bus system
The standard swing equations of ith machine of the 3-machine 9-bus system (figure 1) shown in (22)–(23) are given by
To find out the Hamiltonian \(H_{{m_{i} }}\) for ith machinethe dynamics (a.1)–(a.2) are expressed first as a standard plant model which is given by;
where, \(X_{i} (t_{0} ) = \left[ {\begin{array}{*{20}c} {\omega_{0} } & {\delta_{0} } \\ \end{array} } \right]\) and \(f_{i} = \left[ {\begin{array}{*{20}c} {f_{{i_{1} }} } & {f_{{i_{2} }} } \\ \end{array} } \right]^{T}\) for which
and
Now, putting \(i = 1, \cdots ,3\) for the 3-generator buses and considering all the load buses which are directly affected by the generator buses (i.e., neglecting the buses which are not directly affected by the generator buses), the expression (a.3)–(a.4) can be written as-
Now, using Hamiltonian formalism the nonlinear control law, \(V_{{s_{1} }}\), \(V_{{s_{2} }}\) and \(V_{{s_{3} }}\)(shown in (a.5)–(a.7)) have been derived as shown in the expression (21) in the main text.
The control laws (35) & (46) for the conventional controllers have also been derived in the similar way as follows;
The swing equations of ith machine of the 3-machine 9-bus system (figure 1) shown in (22)–(23) are rewritten as
The affine form of WSCC type IEEE-9 bus system can be written as
where
\(g_{1} (X)\left[ {\begin{array}{*{20}c} { - \frac{{\omega_{0} }}{{H_{1} }}E^{\prime}_{{q_{1} }} \left( {G_{{s_{1} }} \cos \delta_{1} + B_{{s_{1} }} \sin \delta_{1} } \right)} \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ \end{array} } \right]\); \(g_{2} (X)\left[ {\begin{array}{*{20}c} 0 \\ { - \frac{{\omega_{0} }}{{H_{2} }}E^{\prime}_{{q_{2} }} \left( {G_{{s_{2} }} \cos \delta_{2} + B_{{s_{2} }} \sin \delta_{2} } \right)} \\ 0 \\ 0 \\ 0 \\ 0 \\ \end{array} } \right]\); \(g_{3} (X)\left[ {\begin{array}{*{20}c} 0 \\ 0 \\ { - \frac{{\omega_{0} }}{{H_{3} }}E^{\prime}_{{q_{3} }} \left( {G_{{s_{3} }} \cos \delta_{3} + B_{{s_{3} }} \sin \delta_{3} } \right)} \\ 0 \\ 0 \\ 0 \\ \end{array} } \right]\)
Now, employing \(f(X)\) and \(g_{i} (X)\), state feedback control law (35) becomes
Finally, the fictitious inputs (\(\gamma_{1}\), \(\gamma_{2}\) and \(\gamma_{3}\)) of the expression (a.15) are derived using game theory and the control law for the conventional control law (46) is derived as
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Halder, A., Pal, N. & Mondal, D. Design of optimal controller for static compensator via Hamiltonian formalism for the multimachine system. Sādhanā 49, 182 (2024). https://doi.org/10.1007/s12046-024-02462-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12046-024-02462-7